自动往返控制线路
- 格式:ppt
- 大小:2.22 MB
- 文档页数:20
在当今社会,工作效率和自动化程度越来越受到重视。
其中,工作台自动往返控制线路是一种重要的自动化设备,其工作原理对于提高生产效率和减少人力成本具有重要意义。
本文将深入探讨工作台自动往返控制线路的工作原理,并就其在工业生产中的应用进行详细分析。
一、工作台自动往返控制线路的概念1.1 工作台自动往返控制线路的定义工作台自动往返控制线路是指一种能够实现自动来回移动的控制系统,其通过预设的程序和信号来实现工作台在工作区域内自动移动的功能。
1.2 工作台自动往返控制线路的组成工作台自动往返控制线路主要由控制器、传感器、执行机构等组成。
控制器负责指挥和控制整个系统的运行,传感器用于感知工作环境,执行机构则实现工作台的移动。
二、工作台自动往返控制线路的工作原理2.1 传感器感知工作环境工作台自动往返控制线路首先通过传感器对工作环境进行感知,包括检测工作区域的障碍物、测量工作区域的距离等。
2.2 控制器进行信号处理传感器采集到的信息将被传输到控制器中进行信号处理,控制器根据这些信息来决定工作台的移动方向、速度和距离。
2.3 执行机构实现工作台移动控制器发出指令后,执行机构就会根据控制信号来实现工作台的移动,包括正向运动、反向运动以及停止等。
三、工作台自动往返控制线路的应用3.1 工业生产中的应用工作台自动往返控制线路广泛应用于自动化生产线上,能够大大提高生产效率和降低人力成本,尤其在装配线、流水线等场景中表现突出。
3.2 其他领域的应用除了工业生产,工作台自动往返控制线路也被应用于仓储物流系统、医疗器械制造等领域,为智能制造和智能产业提供了有力支持。
四、个人观点和理解在我看来,工作台自动往返控制线路是一种极具实用性和前景的自动化设备,其在工业生产中的应用前景广阔。
随着科技的不断发展,工作台自动往返控制线路将会在更多领域得到应用,并为人类社会带来更多便利。
在这篇文章中,我们深入探讨了工作台自动往返控制线路的工作原理及其在工业生产中的应用。
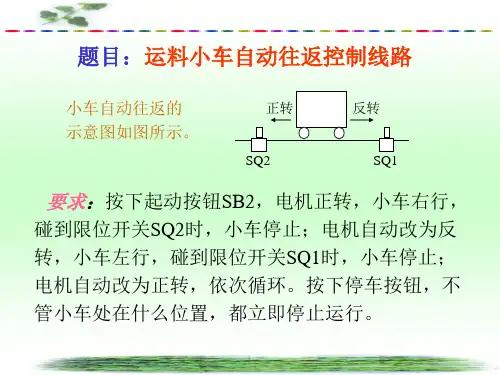
小车自动往返控制线路的工作原理小车自动往返控制线路的工作原理一、引言小车自动往返控制线路是一种常见的电路设计,用于控制小车在两个点之间自动来回运动。
该电路由多个组件组成,包括电源、开关、继电器等。
本文将详细介绍小车自动往返控制线路的工作原理。
二、电源供电小车自动往返控制线路需要一个稳定的直流电源来提供能量。
通常使用交流电源通过整流和滤波的方式转换为直流电源。
在这个过程中,交流电源首先经过一个变压器,将高压交流电转换为低压交流电。
然后通过整流桥将交流信号转换为直流信号,并通过滤波电容器去除残余的交流成分,得到稳定的直流电源。
三、开关控制小车自动往返控制线路中需要使用开关来实现手动或自动切换功能。
当开关处于手动模式时,用户可以通过手动操作开关来控制小车的运行方向。
当开关处于自动模式时,小车会根据预设程序进行往返运行。
四、继电器工作原理继电器是小车自动往返控制线路中重要的组件之一。
它可以通过电磁感应实现信号的转换和放大。
继电器由线圈、触点和铁芯组成。
当线圈通电时,产生的磁场会吸引铁芯,使触点闭合或断开,从而实现信号的转换。
在小车自动往返控制线路中,继电器用于控制小车的运行方向。
当继电器的触点闭合时,电流可以流向一个方向,使小车向前运行;当继电器的触点断开时,电流可以流向另一个方向,使小车倒退运行。
五、往返控制逻辑小车自动往返控制线路中的逻辑由多个继电器和触发器组成。
其中一个继电器用于控制小车的运行方向,另一个继电器用于检测小车是否到达目标位置。
1. 运行方向控制在自动模式下,当用户设置好目标位置后,运行方向控制继电器会根据预设程序来切换小车的运行方向。
当小车到达目标位置时,该继电器会切换方向,并将信号发送给触发器。
2. 到达位置检测到达位置检测继电器用于检测小车是否到达目标位置。
当小车到达目标位置时,该继电器会切换状态,并将信号发送给触发器。
3. 触发器触发器是一个重要的逻辑元件,用于控制小车的动作。
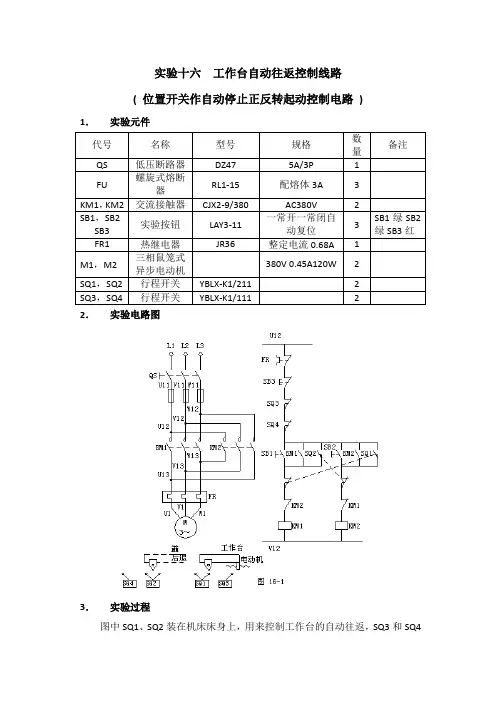
实验十六工作台自动往返控制线路
( 位置开关作自动停止正反转起动控制电路)
1.实验元件
2.实验电路图
3.实验过程
图中SQ1、SQ2装在机床床身上,用来控制工作台的自动往返,SQ3和SQ4
用来作终端保护,即限制工作台的极限位置;在工作台的梯形槽中装有挡块,当挡块碰撞行程开关后,能使工作台停止和换向,工作台就能实现往返运动。
工作台行程可通过移动挡块位置来调节,以适应加工不同的工件。
该线路的工作原理简述如下:
图中的SQ3和SQ4分别安装向右或向左的某个极限位置上。
如果SQ1或SQ2失灵时,工作台会继续向右或向左运动,当工作台运行到极限位置时,撞块就会碰撞SQ3和SQ4,从而切断控制线路,迫使电动机M停转,工作台就停止移动,SQ3和SQ4这里实际上起终端保护作用,因此称为终端保护开关或简称终端开关。
4.检测与调试
按SB1,观察并调正电动机M为正转(模拟工作台向右移动),用手代替挡块按压SQ1,电动机先停转在反转,即可使SQ1自动复位(反转模拟工作台向左移动);用手代替接块按压SQ2再使其自动复位,则电动先停转再正转。
以后重复上述过程,电机都能正常正反转。
若拨动SQ3或SQ4极限位置开关则电机应停转。
若不符合上述控制要求,则应分析并排除故障。

自动往返控制电路
自动往返控制电路
自动往返控制电路是在互锁正反转电路基础上增加了SQ1-SQ4四个形成开关来实现不需要人工操作既可以自动往返切换。
SQ1、SQ2是控制电机正反转;SQ3、SQ4是起到终端保护功能、当SQ1、SQ2失效时让电机停止运行。
电路工作原理:
1.按下按钮SB1:接触器KM1吸合--电动机得电正转运行。
2.松开按钮SB1:接触器辅助触点自锁。
3.行程开关SQ1到达指定位置:SQ1-1断开同时SQ1-2闭合--接触器KM2得电--电动机反转运行。
4.行程开关SQ2到达指定位置:SQ2-1断开同时SQ2-2闭合--接触器KM2得电--电动机正转运行。
保护控制:
当SQ1失效时--运动部件触碰SQ1--SQ1-1常闭触点仍闭合、SQ1-2仍断开--电机继续运行--带动部件触碰形成开关SQ3--SQ3常闭触点断开--接触器KM1线圈断电--电机停止运行。
自动往返控制线路工作原理宝子,今天咱来唠唠自动往返控制线路的工作原理呀。
你可以想象一下,有这么一个小装置,就像一个超级智能的小机器人在一条轨道上来回跑。
这个自动往返控制线路呢,主要是由一些超级厉害的电气元件组成的。
比如说接触器啦,限位开关之类的。
咱先来说说接触器这个家伙。
接触器就像是一个超级大力士的手,它可以控制电路的通断呢。
当电路需要接通的时候,接触器就啪嗒一下把电路给接上了,电流就像欢快的小水流一样在电路里跑起来了。
当不需要的时候,它又能果断地断开电路,就像关上水龙头一样干脆。
再讲讲限位开关,限位开关可有趣啦。
它就像一个小小的守门员,守在轨道的两端。
当这个跑来跑去的小装置到达轨道的一端的时候,就会碰到这个限位开关。
这个限位开关一旦被碰到啊,就像被唤醒了一样,立马给电路发送一个信号。
这个信号就像一个小暗号,告诉电路说:“到头啦,该往回走啦。
”那这整个过程是怎么实现自动往返的呢?比如说这个小装置从左边开始出发,沿着轨道一直往右走。
当它走到最右边的时候,就碰到了右边的限位开关。
这个时候呢,右边的限位开关就会把信号传给控制电路。
控制电路收到信号后,就会告诉接触器,让接触器改变电路的连接方式。
原来让小装置往右走的电路就断开了,然后接通让小装置往左走的电路。
这样,小装置就开始往回走啦,就像一个听话的小宠物一样。
然后呢,当小装置又回到左边的时候,左边的限位开关又发挥作用啦。
它也会给控制电路发信号,控制电路又让接触器再改变电路连接,小装置就又开始往右走。
就这样,小装置就在这个轨道上自动往返地跑来跑去啦。
这个自动往返控制线路在很多地方都超级有用呢。
比如说在一些生产流水线上,有一些小部件需要在两个加工点之间来回运输。
这个自动往返控制线路就可以让运输的小装置自动地在这两个点之间往返,不需要人工一直去操作,多方便呀。
而且啊,这个原理还让整个过程变得很安全呢。
因为有了限位开关这个小守门员,小装置就不会冲出轨道啦,不会像一个没头没脑的小怪兽到处乱撞。
小车自动往返控制线路的工作原理
小车自动往返控制线路通常是使用传感器和控制器来实现的。
以下是一种可能的工作原理:
1. 传感器:小车通常配备了多种传感器,如红外线传感器、超声波传感器或激光传感器。
这些传感器可以检测小车周围的环境和障碍物。
2. 控制器:小车的控制器是一个集成电路板(ICB),通常由微控制器或微处理器组成。
控制器负责接收传感器的信号,并根据这些信号做出决策。
3. 往返控制算法:控制器使用特定的往返控制算法来决定小车的移动方向和速度。
算法可以基于预先设定的路径或根据传感器的输入进行实时调整。
4. 开始往返:小车启动时,控制器会发送指令给电机或驱动器,控制其开始前进。
同时,传感器会不断监测小车周围的环境。
5. 遇到障碍物:当传感器检测到障碍物时,它会将信号传递给控制器。
控制器根据传感器信号的反馈作出决策,可能包括停止、转向或避开障碍物。
6. 调整路径:根据往返控制算法和传感器的反馈,控制器可以调整小车的移动路径,以避开障碍物并保持往返行动。
7. 完成往返:小车会持续根据控制器的指令移动,直到达到预定的终点位置或触发停止条件。
需要注意的是,具体的往返控制线路可能会因小车的设计和应用而有所不同。
上述工作原理提供了一个一般性的概述,实际应用中可能会有更多的复杂性和细节。