第九讲 机器人控制理论与技术
- 格式:ppt
- 大小:593.50 KB
- 文档页数:39
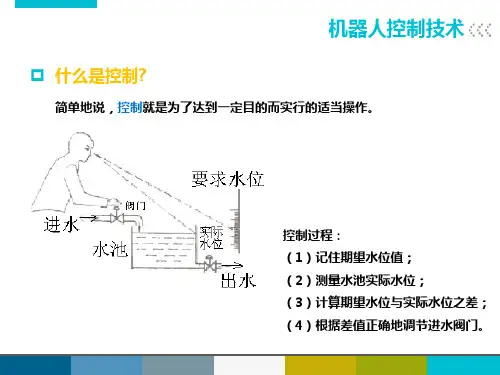


机器人控制的理论与方法机器人作为人类创造的智能化设备,应用领域越来越广泛,涉及生产制造、服务行业、医疗卫生等多个领域。
而机器人能够实现准确、高效、稳定的工作,离不开对机器人控制理论和方法的深入研究。
本文将从机器人控制的定义、分类、控制系统结构、控制方法以及未来发展等方面进行分析和探讨。
一、机器人控制的定义及分类机器人控制是指通过相关系统和软件,对机器人进行运动控制、感知控制、决策控制、智能控制等一系列交互控制地技术硬件。
根据在机器人上实现的控制形式和目标,机器人控制可分为以下几类:1. 控制方式的分类采用数字控制,电气控制,空气压缩或水力控制等方式进行机器人的控制。
2. 时间控制根据时间控制机器人进行特殊的运动。
例如:在周期时间内重复同样的运动。
3. 运动控制通过对机器人动作方式的控制,调整机器人的姿态、速度、力量等参数,从而使机器人完成具体的任务。
4. 感知控制通过机器人感知和识别技术,实现机器人在环境中自主地寻找目标物体,并进行跟随、抓取等控制操作。
5. 决策控制采用模糊控制、神经网络、人工智能等技术,对机器人进行目标选择、路径规划及行为指导等方面的控制。
二、机器人控制系统结构机器人控制系统的结构主要分为以下几个部分:机械系统、电气系统、感知系统、控制系统和用户界面系统。
1. 机械系统机械系统是机器人的核心部分,包括机械臂、运动控制器、传感器等硬件设备,根据不同的应用领域和任务需求,机械系统也不尽相同。
2. 电气系统电气系统是机器人整个系统的关键部分,它包括开关、输电线、电机控制器、电源设备等,为机器人提供运行动力和控制信号。
3. 感知系统感知系统是机器人控制中的重要组成部分,采用传感器、计算机视觉、语音识别、定位技术等对环境信息进行感知,以实现机器人的智能化和自主化。
4. 控制系统控制系统是机器人整个控制系统的核心,通过硬件和软件完成机器人的运动控制、感知控制等操作,提高机器人的灵活度和精度。
机器人学的基本理论和技术随着科技的日益进步,机器人学已成为一个非常重要的领域。
机器人学是一门研究自动控制、计算和传感技术等多学科的综合性科学,旨在研究和开发机器人及其相关技术。
在这篇文章中,我们将介绍机器人学的基本理论和技术。
机器人学的基本理论机器人学主要涉及以下三个方面的研究:机械结构、自动控制和人工智能。
机械结构是机器人学最基本的领域。
机械结构涉及机器人的设计、制造、运动学和动力学等方面。
机器人的外形、系统和部件的设计都属于机械结构研究的范畴。
自动控制是一个独立的领域,主要涉及研究机器人的控制和运动。
自动控制的本质是通过电脑程序来控制机器人的运动和行为。
自动控制也被广泛应用于许多其他领域,如工艺控制、航空控制和汽车制造等。
人工智能是研究机器人如何模拟人类思维和行为的科学领域。
它包含了许多子领域,如机器学习、自然语言处理、计算机视觉和机器人学习等。
人工智能被广泛应用于机器人和智能系统的开发。
研究人工智能是为了让机器人更智能地模拟人类思维和行为,提高机器人的适应性和应用能力。
机器人学的技术机器人学的技术范围很广,但它主要包括以下几个方面的技术:1. 传感技术传感技术是机器人学的核心技术之一。
它主要涉及机器人从周围环境中获取信息的技术,以及将这些信息传输到控制系统中。
机器人常见的传感技术有:视觉传感器、轮廓传感器、声学传感器、深度传感器和激光传感器等。
2. 运动控制技术运动控制是机器人学的另一个重要的技术领域,其主要目标是控制机器人的造型和运动。
运动控制技术包括:伺服技术、偏差调节和反馈技术。
3. 人机交互技术人机交互技术是人类与机器人之间交互的技术,包括:语音交互、手势控制、智能识别和行为建模等。
这些技术旨在让人类更加自然地与机器人进行交互。
4. 机器人智能技术机器人智能技术是机器人学的一个关键技术。
它涉及将议程逻辑特征和人工智能与传感技术和行为控制技术相结合,以实现智能机器人的设计。
机器人智能技术的应用包括:自动导航、人脸识别和机器人辅助等。
机器人技术中的控制理论近年来,随着工业自动化和人工智能技术的发展,机器人技术越来越成熟。
机器人被广泛应用在制造业、医疗、农业、交通、航空等领域,给人们的生产生活带来了巨大的便利和效益。
然而,机器人技术的复杂性也日益增加,如何控制机器人的行为和动作,保证机器人的稳定和精度,成为了机器人技术的重要问题。
本文将就机器人技术中的控制理论进行讨论和分析。
一、机器人控制的基本概念机器人是一种能够执行人类指令的智能机械设备,与人类的运动和感知能力相近甚至超越。
机器人的控制是指在特定环境下对机器人运动和操作进行计算机编程和指令输入的行为,包括传感器、执行器和控制器等硬件设备的协同工作。
通常,机器人的控制包含两个方面:关节控制和轨迹控制。
其中,关节控制是指根据控制器的指令,控制机器人各关节的角度和速度,以保证机器人的准确运动;轨迹控制是指通过运动学和动力学计算,掌握机器人的运动轨迹和速度,以保证机器人的稳定和高效运动。
机器人控制理论的核心是建立控制模型,并进行控制算法编程和优化调整。
二、机器人控制理论的发展历程机器人是现代控制理论的重要应用之一,机器人控制理论的发展涉及多学科,包括控制理论、机械设计、工程力学、材料学、电气工程、计算机科学等。
机器人的控制理论始于20世纪50年代,最初是通过模拟控制和数字控制等方式实现的。
在20世纪70年代,随着计算机技术的进步和数字信号处理技术的发展,机器人控制理论得到了快速发展。
其中,最具代表性的是PID控制和LQR控制。
PID控制是一种经典的控制方案,通过调整比例、积分和微分三部分的参数,来控制机器人的角度和速度,以达到良好的运动效果;而LQR控制是一种基于状态反馈的优化控制方法,通过控制器建立系统状态方程和成本函数,来调整系统的控制策略和参数,以实现最优的控制效果。
三、机器人控制领域的关键技术1、传感器技术机器人的运动和操作都需要通过精确的传感器来实现,包括视觉传感器、力传感器、惯性传感器、光学传感器等。
机器人的控制方法与原理机器人的控制方法与原理是现代机器人技术的核心内容之一。
随着科技的进步和人工智能的快速发展,机器人在各个领域中起着越来越重要的作用。
机器人的控制方法和原理决定了机器人的运动、感知和决策能力,对于实现机器人的自主操作具有至关重要的意义。
一、机器人的感知与控制机器人通过感知环境中的信息获取输入数据,然后根据程序进行运算,最终实现对机器人各个部件的控制。
机器人的感知与控制主要包括以下几个方面:1. 传感器:机器人使用各种传感器来感知环境,例如,视觉传感器、声音传感器、力传感器等。
通过这些传感器的信息反馈,机器人可以获取环境中的物体位置、大小、形状等信息,进而判断应该采取何种动作。
2. 数据处理:机器人利用计算机进行数据处理和分析。
通过对传感器获取的原始数据进行处理和运算,机器人可以识别环境中的物体、计算运动轨迹等。
3. 控制算法:机器人的运动依赖于各个部件的协调工作。
通过控制算法,机器人可以实现运动的规划和控制,例如路径规划、障碍物避开等。
二、机器人的控制方法机器人的控制方法主要分为两种:手动控制和自主控制。
1. 手动控制:手动控制是指通过操纵面板、遥控器或计算机界面等外部设备来操控机器人的动作。
这种控制方法一般适用于较简单的机器人任务,例如工业生产线上的机械臂。
2. 自主控制:自主控制是指机器人根据预先设定的程序和算法自主地进行决策和行动。
这种控制方法要求机器人具备一定的智能和学习能力。
自主控制的机器人可以根据环境变化做出相应的决策,适应各种复杂的工作场景。
三、机器人的控制原理机器人的控制原理是基于控制系统的理论和方法。
控制系统是指通过测量、比较、计算和决策等过程对对象进行控制的系统。
机器人控制系统主要包括以下几个方面:1. 反馈控制:机器人通过对其输出信号和期望值进行比较,从而实现对其行为的调节和纠正。
反馈控制主要通过传感器获取机器人的状态信息,并根据这些信息来调整机器人的动作。

