Source:
12
13
14
15
自由度 Degrees of Freedom
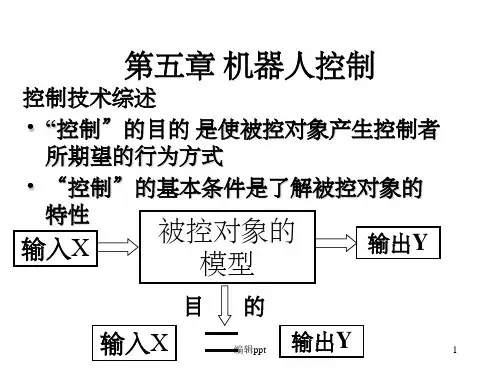
位姿自由度:系统在空间中的位姿描述所 需变量的个数。
16
可控自由度
可控自由度vs不可控自由度
17
根据自由度系统的分类
TDOF = CDOF Holonomic(完整)
比如直升机
TDOF > CDOF Nonholonomic(非完整)
执执执执 Effector
环环 Environment
4
运动装置的作用
机器人本体运动 locomotion 移动环境物体 manipulation
5
直流电机
优点:
简单、价廉、性能可靠、易 于使用、易于购买
输入:
电流或者电压
速度:
3k~9krpm(50~150rps)
问题:
速度较高/力矩较小
9
电机伺服
目的:以转动到给定位置 代替电机的连续运转
组成结构
电机本体 减速箱 位置或速度传感器 控制器或驱动器
输入信号:
经过脉冲调制的电压信号
10
NXT Motor(LEGO)
齿轮编码器 电机
齿轮组
主传动轴
11
NXT Motor转速vs功率曲线
No load, no servo, 9V No load, no servo, 7.2V 11.5 Ncm load, no servo, 9V NXT 11.5 Ncm load, servo, 9V 11.5 Ncm, load, servo, 7.2V
x v cos
y
v sin
v
r r
2
l l