专家控制器的典型结构
▪ 模糊控制系统(Fuzzy Control System)
➢ A new mechanism of control law of knowledge-based (rule-based) and even language-description.
须在伺服电路内引入补偿网络。
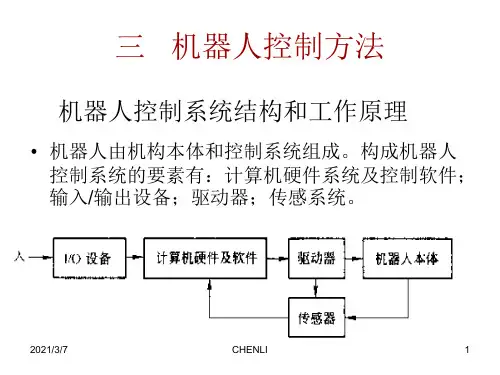
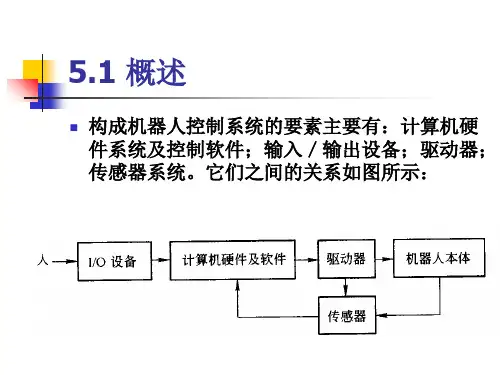
1.机器人位置控制任务分类:点到点的控制(如搬运、 点焊机器人)或连续路径的控制(如弧焊、喷漆机器人)。
2. 位置控制方法:关节空间控制结构和直角坐标空间 控制结构,分别见图5.11(a)和(b)所示。
位置、速度反馈控制
▪ 速度环:使关节电机表现出期望的速度特 性,通常通过驱动器的电流环控制
分解控制
基于计算力矩前馈补偿的多关节分解 控制
▪ 专家控制系统(Expert Control System)
➢ 几乎所有的专家控制都包括:knowledge base(知识库), reasoning engineer (推理机), rule set (控制规则集) and/or control algorithm.
在建立模型时,提出下列两个假设: (1)机器人的各段是理想刚体,因而所有关节都是 理想的,不存在摩擦和间隙。 (2)相邻两连杆间只有一个自由度,要么为完全旋 转的.要么是完全平移的。
笛卡尔空间位置控制
▪ Xd为笛卡尔空间期望位置,Xe为实际位置
从稳定性和精度的观点看,要获得满意的伺服传动性能,必
et d (t) m(t)
d (t)——期望关节角度,通过轨迹规划得到 m (t)——实际关节角度,通过传感器测量得到
控制器公式
▪ 比例控制器(P) ▪ 比例+积分控制器(P+I) ▪ 比例+微分控制器(PD)