第十章能量法解析
- 格式:ppt
- 大小:2.64 MB
- 文档页数:189
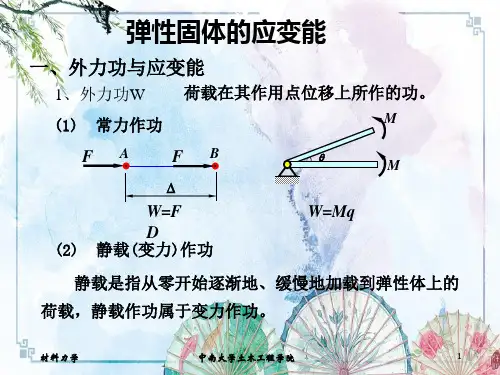
第十章能量法承载的构件或结构发生变形时,加力点的位置都要发生变化,从而使载荷位能减少。
如果不考虑加载过程中其他形式的能量损耗,根据机械能守恒定律,减少了的载荷位能将全部转变为应变能储存于构件或结构内。
据此,通过计算构件或结构的应变能,可以确定构件或结构加力点处沿加力方向的位移。
但是,机械能守恒定律难以确定构件或结构上任意点沿任意方向的位移,也不能确定构件或结构上各点的位移函数。
应用更广泛的能量方法,不仅可以确定构件或结构上加力点处沿加力方向的位移,而且可以确定构件或结构上任意点沿任意方向的位移;不仅可以确定特定点的位移,而且可以确定梁的位移函数。
本章介绍的是:用应变能的概念,根据能量守恒原理来解决与弹性结构或构件变形有关问题的一般方法,这种方法称为能量法。
能量法既可用于计算构件或结构位移;也可用以解决静不定问题及其它一些问题;本章只讨论用能量方法计算位移。
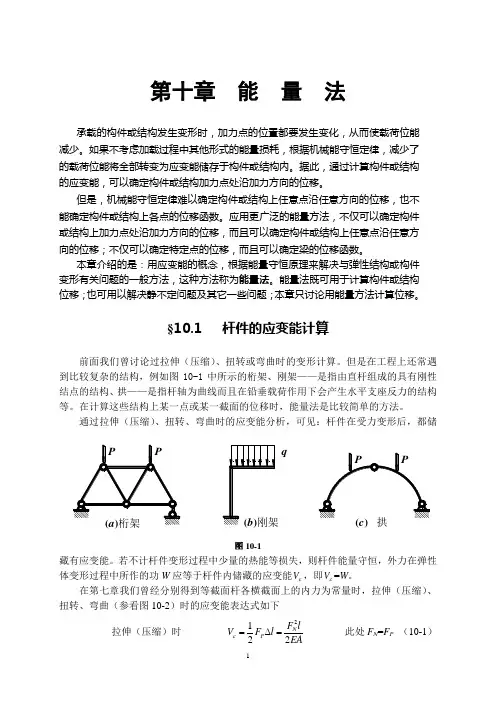
§10.1 杆件的应变能计算前面我们曾讨论过拉伸(压缩)、扭转或弯曲时的变形计算。
但是在工程上还常遇到比较复杂的结构,例如图10-1中所示的桁架、刚架——是指由直杆组成的具有刚性结点的结构、拱——是指杆轴为曲线而且在铅垂载荷作用下会产生水平支座反力的结构等。
在计算这些结构上某一点或某一截面的位移时,能量法是比较简单的方法。
通过拉伸(压缩)、扭转、弯曲时的应变能分析,可见:杆件在受力变形后,都储藏有应变能。
若不计杆件变形过程中少量的热能等损失,则杆件能量守恒,外力在弹性体变形过程中所作的功W应等于杆件内储藏的应变能Vε,即Vε=W。
在第七章我们曾经分别得到等截面杆各横截面上的内力为常量时,拉伸(压缩)、扭转、弯曲(参看图10-2)时的应变能表达式如下拉伸(压缩)时2122NPF lV F lEAε=∆=此处F N=F P(10-1)圆轴扭转时 2122x P PM l V M GI εϕ== 此处M x =M P (10-2)平面弯曲时 2122P M lV M EIεθ== 此处M =M P (10-3)综合以上三个表达式中外力表达的部分,可以把应变能概括地写为12V W F εδ==(10-4) 式中 F ——在拉伸(压缩)时表示拉力(压力),在扭转或弯曲时表示集中力偶,所以此处F 称为广义力;δ——在广义力作用处与广义力F 相应的位移,称为广义位移,在拉伸(压缩)时它是与拉力(压力)相应的位移l ∆,在扭转时它是与扭转力偶矩相应的转角φ,在平面弯曲时它是与弯曲力偶矩相应的截面转角θ(如图2所示)。

一、是非题10.1 杆系结构的变形能,等于各杆变形能之和。
()10.2 弹性体变形能与加力次序无关,只与最后受力有关。
()10.3 结构上的外力作功可能为正或负,因而结构的变形能有正负之分。
()10.4 线性弹性结构的变形能可以叠加而非弹性结构的变形能不能叠加。
()10.5 载荷与变形能之间必为非线形关系。
()10.6以莫尔积分求各种结构在载荷作用下的位移时都可以采用图形互乘法。
()10.7应用单位力法计算出结构在某处的位移值时在数值上就等于该单位力所做的虚功。
()10.8若由载荷引起之弯矩图面积的代数和为零(=0 ),则不论其形心所对应的单位力弯矩图之值Mc 为何值,图乘所得必为零。
()10.9超静定结构的多余约束数即等于建立力法方程的变形条件数。
()10.10结构中的内力与应力只与结构受力和结构尺寸有关,与材料无关。
()10.11变形协调法在本质上也是力法。
()10.12力法的基本未知量均不能用静力平衡条件求得。
()10.13温度变化和支座位移不会引起静定结构的内力,但一般会引起超静定结构的内力。
()10.14力法基本方程均是根据结构支座处的位移约束条件建立的。
()10.15n 次超静定结构的静定基可由解除结构任意n 个约束而得。
()10.16力法正则方程适用于任何材料制成的小变形超静定结构。
()10.17外力超静定结构必须解除外部多余约束而得到静定基。
()10.18以力法求解超静定结构后经力平衡方程验算无误,说明结果正确。
()二、选择题10.19设一梁在n 个广义力F 1 ,F 2 ,……,F n 共同作用下的外力功,则式中为()。
A. 广义力F i 在其作用处产生的挠度B. 广义力F i 在其作用处产生的相应广义位移C. n 个广义力在F i 作用处产生的挠度D. n 个广义力在F i 作用处产生的广义位移10.20一根梁处于不同的载荷或约束状态,则()A. 梁的弯矩图相同,其变形能也一定相同B. 梁的弯矩图不同,其变形能也一定不同C. 梁的变形能相同,其弯矩图也一定相同D. 梁的弯矩图相同,而约束状态不同,其变形能也不同10.21一梁在集中力F 作用下,其应变能为V e 。