适用于恶劣海况条件下的高速自扶正救助艇的实例设计.
- 格式:docx
- 大小:2.55 MB
- 文档页数:5

1600 HP自扶正高速执法艇设计
林志勇;陈顺洪;周德武
【期刊名称】《广东造船》
【年(卷),期】2018(037)002
【摘要】针对高速执法艇应具备良好稳性的需求,进行具有自扶正能力的高速执法艇设计;计算该艇自扶正稳性,评估不同参数对自扶正能力的影响;对自扶正艇的进水口处理方式进行探索.
【总页数】4页(P20-23)
【作者】林志勇;陈顺洪;周德武
【作者单位】海军驻广州七五○厂军事代表室,广州 510656;广州船舶及海洋工程设计研究院,广州 510250;广州船舶及海洋工程设计研究院,广州 510250
【正文语种】中文
【中图分类】U674.2
【相关文献】
1.高速艇自扶正计算及优化 [J], 景帅文;赵自奇
2.28 m高速港政执法艇研发成功并投入使用 [J], 王世杰
3.国内首制自扶正高速救助艇 [J],
4.14.5米级高速自扶正救助艇的设计与建造 [J], 李菊红;徐亚雄;杨光宇;许联盟
5.43m内河新型高速水政执法艇设计 [J], 王世杰
因版权原因,仅展示原文概要,查看原文内容请购买。

救援游艇产品设计方案模板一、设计概述救援游艇作为一种紧急救援工具,具有快速、安全和可靠的特点。
本文将提出一份基于这些特点的救援游艇产品设计方案,以满足各种紧急救援场景下的需求。
二、目标用户本款救援游艇旨在为海上或水域中的紧急救援人员提供支持。
核心用户群包括海岸警卫队、救援搜救机构以及沿海城市等相关机构。
三、设计原则1. 快速响应:救援游艇需要能够快速启动和到达紧急救援地点,以最大限度地缩短救援时间,故设计应便于操作和控制。
2. 安全可靠:救援游艇需要能够承受恶劣海况和高速行驶时的冲击,具备出色的稳定性和船体强度。
3. 多功能:救援游艇设计应考虑到不同的紧急救援任务需求,提供多种功能和设备,如医疗急救设备、油水分离装置等。
四、外观设计1. 船体结构:采用高强度、轻量化的材料,增加船体稳定性和操控性,以应对恶劣海况。
2. 船体颜色:以鲜明的颜色作为主色调,便于被救援对象发现,提高成功救援的可能性。
3. 外观线条:采用流线型设计,减少水阻,提高航行速度和燃油效率。
五、功能设计1. 救援设备:配备紧急医疗急救设备,包括急救箱、担架等,以提供急救支持。
2. 安全装备:配置救生衣、救生圈和救生艇等,以确保救援人员和被救援对象的安全。
3. 通信设备:装备卫星导航、无线电通信设备,提供紧急通讯功能,以确保与外界的及时联系。
4. 油水分离装置:配备高效的油水分离装置,以帮助应对可能的油污事故。
六、人机交互设计1. 操作简便:使用直观的控制面板和按钮设计,减少操作难度,确保操作人员能够快速上手。
2. 舒适供给:提供舒适的座椅、空调系统和娱乐设施,以缓解救援人员在长时间任务中的疲劳感。
七、性能参数1. 最大航速:根据市场需求和技术条件确定最大航速,以满足快速响应的要求。
2. 航行续航力:确保救援游艇具备足够的燃油储备和续航力,以保证长时间任务的需求。
3. 载客量:根据救援任务需求,确定合理的载客量,以保证救援人员和被救援对象的搭乘需求。
高速艇自扶正计算及优化景帅文赵自奇(广船国际技术中心)摘要:自扶正能力是一些救助艇、救生艇和有特殊要求的小艇在艇倾覆后可以自 行回正的能力,是对小艇安全救生能力的加强,可以使小艇在恶劣海况下保证安全 与救生能力。
本文以一船长10 m救助艇为例,对其自扶正能力和装置展开讨论,基 于船舶静力学大倾角稳性,通过N A P A计算该艇在不同状态下的静稳性曲线,从而对 其自扶正能力进行分析与讨论,进而提出改进措施和建议,以优化其性能。
关键词:自扶正N A P A稳性优化DOI:10.3969/j.issn.2095-4506.2016.02.0010前言自扶正能力是船艇安全救生能力中的 一种,对其进行计算和优化,对提高船艇 的安全救生性能有很重要的意义。
自扶正 功能主要依靠横倾时的回复力实现,因此,可以利用大倾角稳性[1]对其计算分析。
本文中的计算实例10 m艇是一款刚性充 气高速滑行艇,敞开式甲板,设计海况4 级,具有自扶正能力。
该艇的自扶正装置 设置于尾部导航架上,利用尾部导航架提 供使船艇翻转的力臂,船艇倾覆后,通过 拉动把手自扶正气囊充气,从而改变该艇 的浮态和浮心位置,实现自动回复正浮状 态。
利用NAPA对其不同状态下的大倾角稳 性进行计算分析,提出优化建议。
1自扶正介绍自扶正能力属于安全救生能力的一种,指船艇倾覆时可以依靠自身的能力回 正,增强了船舶的生存能力。
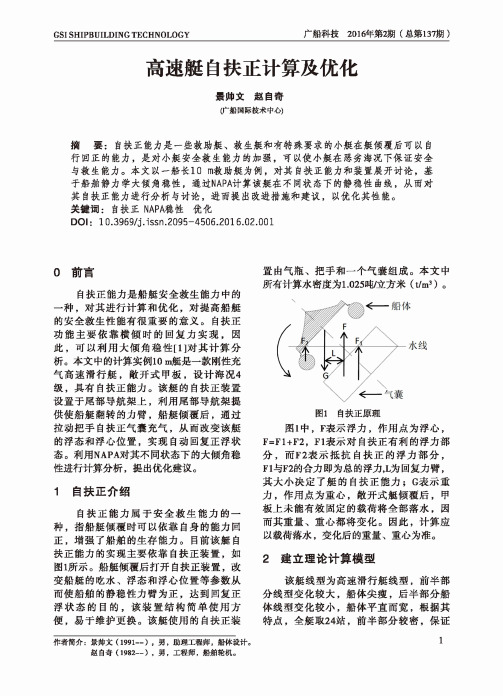
目前该艇自扶正能力的实现主要依靠自扶正装置,如 图1所示。
船艇倾覆后打开自扶正装置,改 变船艇的吃水、浮态和浮心位置等参数从 而使船舶的静稳性力臂为正,达到回复正 浮状态的目的,该装置结构简单使用方便,易于维护更换。
该艇使用的自扶正装作者简介:景帅文(1991--),男,助理工程师,船体设计。
赵自奇(1982--),男,工程师,船舶轮机。
置由气瓶、把手和一个气囊组成。
本文中 所有计算水密度为1.025吨/立方米(t/m3)。
图1自扶正原理图1中,F表示浮力,作用点为浮心,F=F1+ F2, F1表示对自扶正有利的浮力部 分,而F2表示抵抗自扶正的浮力部分,n与F2的合力即为总的浮力,L为回复力臂,其大小决定了艇的自扶正能力;G表示重 力,作用点为重心,敞开式艇倾覆后,甲板上未能有效固定的载荷将全部落水,因而其重量、重心都将变化。
14米级高速救助艇设计说明书指导老师:冯亮王许洁设计人:李东阳、代金宝、蒲春林、赵中锐、朱晓罡、元哲轩、张学锐摘要随着我国改革开放进入深水期,进军海洋必然是我们的发展目标之一,伴随着海洋工程建设,沿海渔业及旅游,娱乐设施的发展,必然要求我国海上救助事业与之适应。
当代世界上发达国家的海上救助都非常强调时间和效果,希望在事故发生的第一时间能快速到达海事现场,并能有效开展救助工作。
人命救助的关键是时间,而我国目前救助站点建设和船舶配置远远不能适应救助任务的需要,因此在我国发展高速救助艇是非常必要的。
高速救助艇对快速性、稳性及操纵性要求极高,此外船上的医疗救助配套设施也占有重要地位。
因此,设计以人为本、科技含量高、节能环保的高速救助艇对我国的海事发展具有重要意义。
关键词:快速性;稳性;抗沉性;船型;阻力;舒适性1、作品概述1.1作品的选题背景、目的与意义1.1.1选题背景我国是一个海洋大国、拥有漫长的海岸线和星罗棋布的岛屿,为了完成我国领海水域的遇险人员人命救生任务以及对沿海200 浬专属经济区海上作业人员的生命保护,需要大、中、小型各类救助船进行分工协作,对于如此广泛海域、广泛救助对象、协同作业的需要,高性能救助艇是一种很合适的船型,相对而言,它造价低廉,对航道和水域的限制条件小,在沿海水域各种海难事故中将会大有作为。
所以引进、开发小型高速救助艇具有极为重要的现实意义。
目前我国不仅拥有吊架式全封闭救生艇、自由降落式救生艇、快速救助艇等各种艇型的救生、救助艇,而且涌现出一批品质优良、规模较大的具有国内自主知识产权的救助艇制造商。
同时,我们引进了国外知名品牌的救助艇制造商,为我国救助艇产业提供了有力的支持,但我国的救助艇在设计制造上仍处于被动地位,技术创新及产品研发落后于发达国家。
要实现我国救助艇产业的健康快速发展,我们不仅要引进、借鉴国外的制造经验,还要突破自己的发展瓶颈,大力创新,研发出具有高性能的新船型。

新型救助船舶的设计理念与实践在广袤无垠的海洋上,无论是繁忙的航运通道,还是人迹罕至的偏远海域,都可能发生各种意外和灾难。
为了能够在关键时刻挽救生命、保护财产、维护海洋环境,新型救助船舶的研发和设计至关重要。
新型救助船舶不仅要具备先进的技术和强大的功能,还要适应不断变化的海洋环境和救助需求。
一、新型救助船舶的设计背景随着全球经济的发展和海洋活动的日益频繁,海上事故的数量和复杂程度也在不断增加。
传统的救助船舶在面对一些极端情况时,可能会显得力不从心。
例如,在恶劣天气条件下,救助行动的难度大幅增加;对于大型船舶的救助,需要更强的牵引和拖拽能力;同时,对于海上火灾、油污泄漏等特殊情况,也需要专门的设备和技术进行应对。
此外,随着环保意识的提高,海洋环境保护成为了一个重要的考量因素。
救助船舶在执行任务的过程中,不仅要成功救助遇险人员和船舶,还要尽量减少对海洋环境的污染和破坏。
二、新型救助船舶的设计理念1、高性能与多功能集成新型救助船舶的设计首先追求高性能。
这包括更快的航速、更好的操纵性和更强的抗风浪能力。
快速到达事故现场是救助成功的关键,因此船舶的动力系统和船体设计都要进行优化,以提高航速和适航性。
同时,多功能集成也是重要的设计理念。
一艘新型救助船舶不仅要能够进行人员救助,还要具备灭火、拖拽、防污等多种功能。
通过配备先进的消防设备、强力拖拽装置和油污回收系统,使其能够应对各种复杂的救助场景。
2、人性化设计考虑到救助人员在执行任务时的工作强度和安全,船舶的内部设计要充分体现人性化。
合理的布局能够提高工作效率,舒适的居住环境可以减轻救助人员的疲劳。
在船舶的操作界面设计上,要注重简洁明了,方便操作人员快速掌握和响应。
同时,为救助人员配备先进的个人防护装备和安全保障系统,确保他们在危险环境中的生命安全。
3、环保可持续海洋环境保护是不可忽视的问题。
新型救助船舶在设计时要采用环保材料和节能技术,减少船舶运行过程中的污染物排放。

4000kW新型海洋救助船船型方案论证作者:张鹏翀王世伟来源:《水运管理》2021年第11期0引言随着国家海洋强国战略实施和交通强国建设的深入推进,我国在海上资源开发、航运发展和港口建设等领域迎来新的发展机遇,对于构建国家海上专业应急救助保障体系也提出了更高的要求。
但是,海上专业救助力量目前在救助船舶数量、性能和结构方面,与海上人命、财产救助的实际需求相比还有一定差距。
加快开发建设操纵灵活、能够实施快速人命救助且具备拖带和消防能力的4000kW新型海洋救助船,既是完善中型救助船型序列的迫切需要,也是加快建成现代化专业救助体系的迫切需要。
4000kW新型海洋救助船主要用于中低海况下沿海水道、岛礁等复杂海域的人命救助和船舶救助,可兼顾高海况下救助任务,可参与动态值班待命,具备海上人命救助、拖带救助、潜水训练支持、对外消防、海上搜救、船与直升机配合、水下搜救及物资供应等作业能力。
1船型选择船型选择应根据目标船的服务海域、主要功能定位、所需的载质量、航速、系柱拖力,以及船舶的主要功能、设备、系统配置等综合考虑确定。
与6000kW、8000kW和14000kW等大型海洋救助船相比,4000kW新型海洋救助船既要保证较小吃水,又要保证相应载质量。
另外,待命点距离服务海域较近,且对航速要求相对不高,这些条件就决定了目标船宜选用稍肥大船型,其船长与船宽比(//B)在4.0~4.5,船宽与型深比(B/D)在2.3~2.4。
该船型应在船首设上层建筑甲板室、在艉部设大面积的救生作业甲板、在舷侧设满足水面吊装作业和水下吊装用的液压折臂式吊机、在主甲板中部设置大型液压拖曳绞车、在罗经甲板或消防炮平台上设对外消防炮等。
该船型动力装置应满足在自由航行、拖带、低速航行、定点作业、消防作业等多种工况下灵活切换,因此,采用综合电力系统加全回转舵桨的推进系统较为合适,在该推进技术下燃油燃烧的充分陛及单位油耗都能达到最佳状态。
该船型应采用动力定位方式,满足作业人员在浅滩岛礁、港口码头等复杂狭窄海域作业时的安全性和操纵灵活性的需要。
1600 HP自扶正高速执法艇设计作者:林志勇陈顺洪周德武来源:《广东造船》2018年第02期摘要:针对高速执法艇应具备良好稳性的需求,进行具有自扶正能力的高速执法艇设计;计算该艇自扶正稳性,评估不同参数对自扶正能力的影响;对自扶正艇的进水口处理方式进行探索。
关键词:自扶正;高速执法艇;船舶设计;进水点中图分类号:U674.2 文献标识码:AAbstract: According to the stability requirements, a high-speed response boat with self-righting capability is designed, the self-righting stability is calculated, the effects of different parameters on the self-righting capability are evaluated and the design of flooding points for the self-righting boat is discussed.Key words: Self-righting; High-speed response boat; Ship design; Flooding point高速执法艇根据使命不同,一般具备一定防护能力,并配置机枪武器、或海上搜救设备等。
高速执法艇通常需要在恶劣的海洋环境条件下执行任务,为保障人员安全、提高执法能力,高速执法艇应具有良好的完整稳性和抗风能力,甚至需具有倾覆后自动扶正的能力。
1 船舶自扶正原理船舶静止漂浮于水中时,受到自身重力和水的浮力两个作用力,其大小相等但方向相反,作用在同一铅垂线上,如图1(a)。
当船舶受到风浪等外力干扰产生倾斜时,船舶的重量和重心位置并没有发生变化,排水体积大小也没有变化,但由于船舶本身倾斜,其水下的体积形状发生了改变,浮心位置也发生了变化。
附件1:14米级高速救助艇1.产品项目本项目为一艘航行于沿海航区的海上高速救助艇,全船为铝合金焊接结构,单体、单甲板,双机,双推进器。
本艇适用于在高海情环境中执行救助作业,以人员“安全第一为首要,主要对海上落水人员或滞留在海难船舶上的待救人员实施救援。
主要设计依据:满足CCS《沿海小船入级与建造规范(2005)》和ZC《沿海小型船舶法定检验规则要求(2007)》、《国内航行海船法定检验技术规则(2004)》及其相关的修改通报等法规。
2.主尺度范围型长L ≤14.5 m型宽B ≤4.2 m型深D ~2.0 m设计吃水T ~0.9 m排水量等根据设计而定。
3.技术性能指标3.1最大航速v m a x ≮35kn(100%燃油和淡水,艇员4人,主机功率设为标定功率的9 5%);3.2艇员4人(设计载荷),床位2个;3.3搭载人员1 2人(满载);3.4最大获救能力15人(超载);3.5凡人员工作和生活时间较长的舱室都配置冷、暖空调;3.6续航力不小于300涅;3.7自持力2 4小时;3.8抗风能力8级以上,能在5级海况中安全航行并进行施救作业;3.9要求本艇在重载情况下还须具备以下能力之一3.9.1全船浸水不沉、不翻;3.9.2对于任意角度的船舶横倾都有自扶正能力。
4.设计要求4.1总体布置合理、实用,外型威武、大方,外观线条力求流畅、舒适。
希望出现能让人眼睛一亮、与众不同的创新型船舶外型;4.2节能、环保,综合性能优良(包括快速性、适航性、操纵性和不沉性等);5.要求提供的基本设计图纸和相关技术文件5.1三视图5.2技术文件5.2.1设计方案;5.2.2创新占;5.2.3性能预估及技术发展途径;6.评分标准建议6.1总体布置(总50分)6.1.1全船布置紧凑、舒适,各专项设备配置合理(最高25分);6.2.2船舶外型(最高25分)6.2 船舶性能(总25分)6.2.1(最高5分):6.2.2抗浪性(最高5分);6.2.3抗沉性(最高5分);6.2.4操纵性(最高5分);6.2.5施救作业的安全性与可靠性(最高5分)6.3 可行性论证(总25分)6.3.1根据参赛作品应用前景和可实现性进行综合评分。
救助船舶的结构设计与分析在广阔无垠的海洋上,救助船舶就如同守护生命的天使,随时准备应对各种突发状况,展开紧急救援行动。
而其结构设计的合理性与科学性,直接关系到救助任务的成败以及船员和被救人员的生命安全。
救助船舶的结构设计需要充分考虑多种因素。
首先,是船舶的稳定性。
在波涛汹涌的海面上,船舶必须能够保持平衡,不轻易发生侧翻或倾覆。
这就要求设计师在船体的形状、重心的位置以及载重分布等方面进行精心计算和规划。
例如,采用宽而深的船体设计,可以增加船舶在水中的横向稳定性,使其在遭遇大风大浪时更加平稳。
其次,强度也是至关重要的因素。
救助船舶在执行任务时,可能会遭受海浪的冲击、碰撞等各种外力作用。
因此,船体的结构必须足够坚固,能够承受这些巨大的压力。
这就需要使用高强度的钢材,并合理设计船体的框架结构,增加关键部位的厚度和加强筋的布置,以确保船舶在恶劣环境下不出现结构损坏。
再者,快速性也是救助船舶结构设计中需要重点关注的。
时间就是生命,在紧急救援中,船舶能够迅速抵达事故现场是至关重要的。
这就要求船体的外形具有良好的流体动力学性能,减少水的阻力。
通过优化船首和船尾的形状,以及合理设计船舶的长宽比,可以有效提高船舶的航行速度。
救助船舶的内部结构设计同样有着严格的要求。
例如,医疗救援区域的布局必须合理,方便医护人员对伤者进行快速救治。
病房、手术室、药品储存室等都需要精心安排,确保医疗设备能够正常运作,并且有足够的空间容纳被救人员。
此外,救援设备的存放和使用也是内部结构设计的重要考虑因素。
起重机、救生艇、消防设备等都需要有固定的存放位置,并且在使用时能够迅速取出。
同时,这些设备的存放位置不能影响船舶的重心和稳定性。
在结构设计中,还需要考虑船舶的抗沉性。
即使船舶在部分舱室受损进水的情况下,也能够保持一定的浮力,不至于迅速沉没。
这可以通过设置水密舱壁、排水系统等措施来实现。
为了更好地理解救助船舶的结构设计,我们以一艘典型的救助船舶为例。
第41卷第9期2020年9月哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报Journal of Harbin Engineering UniversityVol.41ɴ.9Sep.2020远海无人快艇的自扶正优化设计方法林焰1,2,徐兴昂1,叶超1(1.大连理工大学船舶工程学院,辽宁大连116024;2.大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024)摘㊀要:为满足远海无人快艇在恶劣海况航行时的自扶正需求,并解决传统无人快艇自扶正设计过程中的艇体曲面形状单一问题,本文提出一种基于参数化设计甲板的远海无人快艇自扶正设计方法㊂该方法以给定的快艇下艇体为基础,运用参数化设计的思想,引入若干个可变几何参数的控制点来实现封闭甲板曲面的构建,通过计算快艇在横倾0ʎ~180ʎ的复原力臂来判断其是否满足自扶正条件,并运用粒子群算法筛选出符合约束条件的最优设计方案㊂通过一个设计实例表明,运用该自扶正设计方法可以在不改变快艇快速性和操纵性的基础上快速得到满足自扶正要求的设计方案;同时,运用该设计方法,无需额外添加气囊等自扶正设备,可以节约快艇的布置空间和设计成本㊂关键词:无人艇;自扶正;参数化设计;粒子群算法;NURBS ;船舶设计;船舶稳性;几何参数DOI :10.11990/jheu.201907067网络出版地址:http :// /kcms /detail /23.1390.u.20200713.1835.002.html 中图分类号:U661.2㊀文献标志码:A㊀文章编号:1006-7043(2020)09-1261-07Self-righting optimization design for an unmanned speedboaton the high seasLIN Yan 1,2,XU Xingang 1,YE Chao 1(1.School of Naval Architecture and Ocean Engineering,Dalian University of Technology,Dalian 116024,China;2.State Key Labo-ratory of Structural Analysis for Industrial Equipment,Dalian University of Technology,Dalian 116024,China)Abstract :Self-righting is the ability of a ship or a boat to be able to return to its original position after experiencing a 180ʎroll.The existing design process of self-righting does not fully meet the self-righting capability required by an unmanned speedboat on the high seas under extreme sea conditions.Moreover,there is deficiency in the design of the hull shape of an unmanned speedboat.To solve these problems,a new self-righting design method based on the parametric design of decks for an unmanned speedboat on the high seas is proposed.It considers the given lower hull of the speedboat as the basic factor and introduces several control points of variable geometrical parameters u-sing the idea of parametric design to realize the construction of a closed deck surface.It determines whether the speedboat satisfies the self-righting condition by calculating the righting arm of a speedboat in the range of heel an-gle 0ʎ~180ʎ.Then particle swarm optimization algorithm (PSO)is used to select the optimal design scheme,which conforms to the constraint conditions.The design example shows that the design method can be used quickly and effectively to obtain the design scheme that meets the self-righting capability without changing the speedability and maneuverability of a speedboat.Meanwhile,if this design method is used,there is no need for any additional self-righting equipment,e.g.,air bag.We can say that the proposed method reduces the layout space,design cost of speedboat,and optimizes the self-righting capability.Keywords :unmanned speedboat;self-righting;parametric design;particle swarm optimization;NURBS;ship de-sign;ship stability;geometric parameter收稿日期:2019-07-19.网络出版日期:2020-07-14.基金项目:国家重点实验室专项基金项目(S18315).作者简介:林焰,男,教授,博士生导师;徐兴昂,男,博士研究生.通信作者:林焰,E-mail:linyanly@.㊀㊀无人快艇作为智能化㊁机动化㊁无人化的海上交通工具,近年来在海洋勘探㊁海上救援㊁海洋环境监测等方面逐渐开始发挥巨大的作用[1-2]㊂随着人类在海上活动区域的不断拓展,无人快艇的作业海域也相应地逐渐向深㊁远海发展[3]㊂然而,相比于近岸处,远海的风浪流条件变得更加不利于浮体航行且难以预测[4]㊂同时,对于超出视距范围的自操控无人快艇而言,自发保持航行浮态是维持航线和有效避障的前提㊂因此,面对远海相对复杂及恶劣的海况,无人快艇应具备足够的稳性,甚至达到在任意角度下能够返回正浮状态的能力(简称为自扶正)㊂哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第41卷国内外学者对无人快艇的自扶正性能开展了相关试验研究㊂Grenestedt等[5]在超小型碳纤维高速艇 LORCA 中将甲板曲面设计为封闭形式,并通过试验证实了其具有自扶正性能,但其仍缺乏系统的自扶正设计方法;Akyıldız等[6]利用具有水密功能的上层建筑为艇倒浮时提供充足的浮力以实现艇的自扶正,并通过与加装气囊或自操作式压载水置换系统作对比说明了前者实现自扶正的优势;景帅文等[7]提出利用自扶正气囊实现艇的自扶正,但采用设备进行自扶正,既浪费布置空间,增加载重量,频繁收放气囊也会使得无人艇的操纵问题变得更加复杂,不利于正常航行㊂对于远海无人快艇而言,封闭甲板主要是作为提供稳性和保证艇体舱室水密性的构件,其功能相较于传统快艇甲板而言更为单一化㊂基于无人快艇的功能背景和远海的环境特点,本文引入了针对封闭式甲板的自扶正设计理念,以满足快速性㊁操纵性㊁基本稳性要求的快艇下艇体为基础,结合三维参数化技术的思想,通过引入若干个可变几何参数的甲板曲面控制点对封闭甲板曲面进行优化,实现了一种新型的无人快艇自扶正方案设计,并总结相应的设计方法㊂同时,依托于大连理工大学自主设计的无人快艇案例,应用该方法进行自扶正设计,提出优化后的设计方案㊂1㊀无人快艇三维参数化设计甲板曲面优化设计是一个复杂的过程,在整个周期中需要不断地优化与完善㊂为了提高设计效率,可以将一些重要的控制变量进行参数化处理[8-9]㊂在甲板系列化产品设计中,各方案和原型(或母型)产品之间的差别通常可以通过数学建模后几个关键的特征参量来体现,通过修改不同的参数可以得到性能不同的设计方案㊂基于以上参数化设计的思想,为了在设计螺旋线[10]循环的过程中筛选出满足自扶正要求且整体性能较优的甲板方案,本节对无人快艇完成自扶正功能的过程进行数学建模,并在下一章结合快艇稳性计算的物理模型进一步完成方案的设计和筛选[11]㊂1.1㊀三维参数化建模本文的总体设计思路是以型值不随自扶正优化而改变的快艇下艇体(如图1所示)为基础,对快艇的甲板曲面进行三维建模设计(如图2所示),并以快艇自扶正性能为约束条件,逐渐优化甲板曲面的几何形状,最终获得符合约束条件且性能优良的快艇自扶正设计方案㊂在进行甲板曲面优化设计时,通过修改甲板曲面的参数实现曲面的变换㊂为了保证甲板曲面变换过程中满足光顺性要求[12],本文采用NURBS曲面片来表达甲板曲面[13],并按照一定的约束条件对NURBS曲面片的控制顶点进行坐标变换,从而实现甲板曲面的几何变换㊂图1㊀快艇下艇体Fig.1㊀Lower hull of thespeedboat图2㊀甲板曲面控制点Fig.2㊀Deck surface control points1.1.1㊀NURBS表达式非均匀有理B样条(non-uniform rational b-splines,NURBS)曲面是目前应用最广泛的船体曲面表达方法之一[14]㊂船体曲面的NURBS表达式为:H(u,v)=ðm-1i=0ðn-1j=0B i,q(u)B j,r(v)W i,j P i,jðm-1i=0ðn-1j=0B i,q(u)B j,r(v)W i,j(1)式中:u㊁v为参数;m㊁n为U向与W向控制顶点的个数;P i,j(0ɤiɤm-1,0ɤjɤn-1)为控制顶点, P i,j由对应点的x㊁y㊁z3个坐标组成;W i,j为权因子, B i,q(u)和B j,r(v)分别为沿U向的q次和沿W向的r次B样条基函数,分别由U方向上的节点矢量和W 方向上的节点矢量控制,通常q和r均取3㊂本文基于改变式(1)中控制顶点P i,j的坐标实现无人快艇自扶正的设计目标㊂1.1.2㊀甲板曲面表达在实际设计过程中,由于封闭甲板曲面存在部分接缝高阶不连续的可能性,虽然不影响其功能的实现,但利用整体表达法构建封闭甲板曲面难以对所有可行方案进行有效表达㊂因此,本文运用分片表达法[15]来构建封闭甲板曲面㊂图2中所示的点为本文构建封闭甲板曲面所取的控制点,通过改变这些点的坐标位置实现封闭甲板曲率[16]的变化㊂其中,点P1为艇艉顶点(中纵剖线与甲板边线的艉交点),点P2为艇艏顶点(中纵剖线与甲板边线的艏交点),点P3为甲板边线上不与P1㊁P2重合的某一点,点P3㊁P4㊁P7具有相同的纵向坐标,点P4㊁P5㊁P6具有相同的垂向坐标,点P1㊁P2㊁P5㊁P6㊁P7都在中纵剖线上㊂构建封闭甲板曲面的过程如下㊂首先,创建图2所示的控制点,分别过P3㊁P4㊁㊃2621㊃第9期林焰,等:远海无人快艇的自扶正优化设计方法P 7,P 1㊁P 5㊁P 7,P 2㊁P 6㊁P 7生成如图3所示的NURBS 曲线N 1㊁N 2㊁N 3㊂其中,这3条曲线在P 7处满足连续性原则㊂其次,以N 1㊁N 2和甲板边线为轮廓线,通过NURBS 表达式计算曲面S 1;同理,以N 1㊁N 3和甲板边线为轮廓线计算曲面S 2㊂再次,以N 1为交线拼接S 1和S 2,并使拼接处满足C 2连续关系;利用相同方法构建无人快艇左舷的封闭甲板NURBS 曲面㊂最后,以N 2和N 3为交线将快艇左右舷NURBS 曲面进行拼接,并使拼接处满足C 2连续关系㊂至此,封闭甲板曲面构建完毕㊂图3㊀NURBS 曲线曲面Fig.3㊀NURBS curve and surface1.2㊀三维参数化设计方法基于1.1节的三维参数化建模思路,无人快艇的参数化设计方法可以具体按以下步骤实施:首先,在给定快艇下艇体的基础上构建一个平整的常规甲板曲面,提取出对构建甲板曲面起关键约束的控制参数,并分析这些控制参数之间的拓扑关系㊂其次,设计者根据参数之间的拓扑关系编写参数化程序,并将这些关键参数显示在人机交互窗口中,通过修改这些参数的可变范围和变化步距生成大量的甲板曲面设计方案㊂最后,根据约束条件筛选出最优的快艇自扶正设计方案㊂2㊀无人快艇自扶正基本原理2.1㊀快艇稳性评估船舶在外力作用下偏离其平衡位置而倾斜,当外力消失后,能自行回复到原来平衡位置的能力,称为船舶稳性[17]㊂图4(a)表示无人快艇的等轴侧视图,图4(b)~(e)分别表示无人快艇在不同横倾角度下的横剖面图㊂F G 表示艇所受重力,B 表示艇的浮心位置㊂当艇受到外力(倾斜力矩)作用时,其水线由正浮时的WL 变化为WL 1㊂这时艇的排水(水下)体积虽然数值大小没有改变,但其形状已经发生了一定的变化㊂此时,重力和浮力的作用线不在同一条铅垂线上,二者形成如图4(c)和(d)所示的力偶M R ,该力偶使得艇能够回复到原来的平衡位置㊂从重力作用点G 作垂直于浮力作用线F B 的垂线GZ ,该垂线间长即为复原力臂l 的代数值大小㊂力偶M R 与复原力臂l 存在下述关系:当l 为正时,M R 能够使艇回复到原来的正浮位置;当l 为负时,M R 不仅不能抵抗倾斜作用,而且使得艇继续倾斜;当l 为零时,艇到达随遇平衡状态㊂可以看出,l 的符号决定了艇倾斜状态下的自扶正能力㊂图4㊀无人快艇横剖面图Fig.4㊀Cross sectional view of unmanned speedboat2.2㊀自扶正计算由于本文研究的对象是远海无人快艇,因此致使快艇发生倾覆的因素主要来自于不确定性的风浪流㊂在快艇发生倾覆或自扶正的过程中,由于外在因素的影响,会使艇在回转运动过程中存在一定的角速度,因此若使艇在任意角度下都能够自动回复到正浮状态,即实现自扶正,只需保证复原力臂l 在0ʎ~180ʎ始终大于零(允许l 接近零的情况出现)㊂在下文中,满足自扶正条件的含义等同于复原力臂l 在0ʎ~180ʎ始终大于零,并作为快艇自扶正设计的其中一个约束条件㊂另外,快艇具备自扶正能力后,0ʎ~90ʎ最大复原力臂l m 是影响快艇稳定性的重要因素,l m 愈大,快艇抗倾覆能力愈强,因此本文将l m 作为快艇自扶正设计的优化目标㊂如图4(c)所示,φ表示艇的横倾角度㊂艇坐标系下,浮心位置B 假设已经确定,B 的坐标值为(x B ,y B ,z B ),重心作用点G 的坐标为(x G ,y G ,z G )㊂那么l 的计算公式为:l =y B cos φ+z B sin φ-z G sin φ(2)㊀㊀艇翻转过程中,其重心保持不变,而浮心的位置却是一个随φ改变的量㊂本文采用等排水量计算法[18]并结合分段线性插值[19]编写相应的VB 程序,确定不同横倾角φ时倾斜水线WL 1的位置㊂此时,艇排水体积的形心即㊃3621㊃哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第41卷是浮心位置B ㊂将B 的坐标代入式(2)计算不同横倾角φ时的复原力臂l ,进而判断其是否满足自扶正约束条件㊂2.3㊀自扶正功能的整体实现流程自扶正功能的整体实现流程如图5所示,其中k 表示满足自扶正约束条件的设计方案数量,ε表示优化算法终止条件㊂通过图5,可以计算不同控制参数下的复原力臂,并获得符合约束条件的最优自扶正设计方案㊂3㊀实例计算与分析在该实例中,本文以大连理工大学自主研发的无人快艇方案为依托,以全封闭式无人快艇为例阐述自扶正的设计思想:即以 不改变已有艇体优化后的甲板边线以下型线 为前提,通过修改封闭甲板的设计参数来保证无人快艇的稳性和自扶正性能㊂其中,封闭甲板设计参数的改变基于本文提出的三维参数化设计思想加以进一步实现㊂图5㊀自扶正功能实现流程Fig.5㊀Self-righting function implementation process3.1㊀无人快艇方案所述的无人快艇基本主尺度及性能参数如表1所示㊂㊀㊀以上参数是通过前期对甲板边线以下型线优化设计后的最终结果,现基于以上条件进行甲板曲面的自扶正优化设计㊂在本文实例中,随着甲板曲面设计参数的改变,甲板曲面的表面形状和面积都会发生相应的变化㊂基于编写的自扶正计算VB 程序,对参数改变后快艇的排水量Δ和重心G 进行计算,并将计算结果代入式(2)计算不同甲板曲面对应的复原力臂㊂表1㊀无人快艇基本参数Table 1㊀Basic parameters of the unmanned speedboat项目数值总长度L OA /m 7.5垂线间长L PP /m 7.1型宽B /m 2.6设计吃水d /m 0.49排水量Δ/t 2.9适应海况~4级(生存海况5级)续航力~/mile 300n巡航速度V c /kn18最大航速V max /kn303.2㊀无人快艇的自扶正优化过程3.2.1㊀数学模型的建立以艇体基平面㊁中站面㊁中线面的交点为坐标原点O ,艇体基线为x 轴(艇首为正方向),基平面与中站面的交线为y 轴(右舷为正方向),中线面与中站面的交线为z 轴(向上为正方向)建立如图6所示的艇体坐标系Oxyz ㊂其中,P 1㊁P 2的位置坐标在下艇体给定的前提下是确定的㊂设P 1㊁P 7之间的纵向距离为δx 1,垂向距离为δz 1,P 2㊁P 7之间的纵向距离为δx 2㊂设P 7的位置坐标为(x 7,0,z 7)㊂根据已有的艇体坐标系,提取给定下艇体甲板边线对应的一系列坐标点,通过对坐标点线性插值得到甲板边线的空间方程h (x ,y ,z )=0㊂由于P 3和P 7的纵向坐标相等,则可以通过方程h =0求得P 3的横向坐标y 3,此时P 3㊁P 7之间的横向距离δy 3=y 3㊂设P 5㊁P 7之间的纵向距离δx 5=μ1㊃δx 1,垂向距离δz 5=μ2㊃δz 1,P 6㊁P 7之间的纵向距离δx 6=μ3㊃δx 2,P 4㊁P 7之间的横向距离δy 4=μ4㊃δy 3㊂其中μ1㊁μ2㊁μ3㊁μ4为比例系数㊂可以看出,通过修改P 7的位置坐标和相应的比例系数可以改变控制点P 3~P 6的位置坐标,进而实现甲板曲面的变换㊂图6㊀艇体坐标系Fig.6㊀Hull coordinate system㊃4621㊃第9期林焰,等:远海无人快艇的自扶正优化设计方法从稳性角度出发,本文将快艇自扶正设计优化问题简化为优化l m 的单目标优化问题:将快艇0ʎ~90ʎ最大复原力臂l m 作为优化目标,自扶正性能及甲板边线等作为约束条件,控制参数x 7㊁z 7㊁μ1㊁μ2㊁μ3㊁μ4作为变量建立无人快艇的自扶正数学模型:max l m =F (x 7,z 7,μ1,μ2,μ3,μ4)s.t .l >0z 7>00<μ1,μ2,μ3,μ4<10<φ<πh (x ,y ,z )=0ìîíïïïïïïïï(3)3.2.2㊀自扶正方案的优化以图6所示艇体坐标系为基准,该无人快艇实例中,甲板曲面控制点P 1的位置坐标为(-3540,0,953),P 2的位置坐标为(3560,0,1006)㊂给定控制参数x 7㊁z 7㊁μ1㊁μ2㊁μ3㊁μ4的初始值,通过前文叙述的步骤构建封闭甲板曲面,并计算对应的复原力臂l ,若l 满足自扶正条件,则可以得到当前控制参数下的l m ㊂针对优化目标l m 的求解特点,本文使用粒子群算法[20]对快艇自扶正方案进行优化设计㊂粒子群算法相较于传统优化算法拥有更高的计算效率和全局搜索能力,且具有很好的收敛性能[21]㊂因此使用该算法有利于提高本文的自扶正优化设计效率㊂在使用粒子群算法进行自扶正优化设计时,首先,根据控制参数取值范围对参数进行初始化,并计算每组迭代粒子的参数对应的l m ㊂其次,按照算法的更新规则对参数进行更新,同时更新每组迭代粒子的最优值和全局最优值㊂最后,若算法满足终止条件,则结束算法并输出最终的优化结果l m ,即max l m ,否则继续进行迭代计算㊂3.3㊀最终设计方案根据前文叙述的稳性基本原理和计算方法,以VB 作为基本语言,编写无人快艇自扶正设计程序㊂其程序界面如图7所示㊂该程序具有以下功能:计算给定控制参数下的复原力臂;根据控制参数及约束条件,对快艇甲板曲面进行优化设计,得出最优的快艇自扶正设计方案,并输出优化结果㊂在运行该程序时,通过读取文件的形式将给定的快艇下艇体输入程序,并提取甲板边线作为设计约束㊂首先,利用程序对前文所述的自主设计无人快艇进行复原力臂的计算㊂根据该无人快艇的设计要求,主机重心的纵向位置x M =-1500mm㊂如图8(a)㊁(b)所示,无人快艇的初始甲板为平甲板形式,此时,甲板曲面只受快艇下艇体约束,与控制参数无关㊂直接运行程序计算并绘制其对应的复原力臂曲线,结果如表2项目1和图9曲线1所示㊂可以看出,此时快艇的复原力臂不满足自扶正设计要求㊂为与自扶正设计后的计算结果作对比,设平甲板曲面对应的(x 7,z 7)为(-1500,1050),并取出自扶正设计程序在x 7=-1500mm 处的部分计算结果,得到如表2项目1~4和图9曲线1~4所示的对比结果㊂其中,比例系数(其值需要考虑快艇的设备布置)的取值如表3第2列所示㊂表2中l s 表示最小复原力臂,φv 表示稳性消失角㊂由表2和图9可以看出,当x 7和比例系数一定时,随着z 7的增大,快艇逐渐满足自扶正要求㊂另外,由于快艇的整体质量和重心高度随着z 7的增大而增大,而快艇下艇体的型值在自扶正优化过程中保持不变,因此随着z 7的增大,正浮状态到甲板边线入水角度范围内的复原力臂l 逐渐减小㊂图7㊀无人快艇自扶正设计程序界面Fig.7㊀Design program interface for self righting of un-mannedspeedboat图8㊀无人快艇方案Fig.8㊀Unmanned speedboat scheme表2㊀自扶正设计计算结果Table 2㊀Calculation results of self-righting design项目编号x 7/mmz 7/mm l m /mm l s /mm φv /(ʎ)1-1500.001050.00282.65 762-1500.002200.00327.561573-1500.002240.00323.39 1.221804-1500.002500.00296.0623.171805-1734.992215.92330.060.41180㊃5621㊃哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第41卷图9㊀复原力臂曲线Fig.9㊀Righting arm curves表3㊀甲板曲面比例系数Table 3㊀Proportional coefficient of deck surface比例系数初始数值优化结果μ10.40.5622μ20.30.3144μ30.60.7642μ40.40.7860㊀㊀其次,利用程序进行快艇的自扶正优化设计㊂为保证程序的设计效率并考虑主机高度影响,同时结合给定下艇体的形状特征和前文中控制参数改变对复原力臂的影响分析,控制参数x 7㊁z 7㊁μ1㊁μ2㊁μ3㊁μ4的取值范围及粒子群算法的基本参数设置如图7所示㊂其中,N 表示粒子种群规模,c 1和c 2表示加速常数,T max 表示最大迭代次数,P w 表示惯性权重,其数值随迭代次数线性递减,PV 1-PV 6分别表示x 7㊁z 7㊁μ1㊁μ2㊁μ3㊁μ46个维度粒子的速度上限值㊂若算法连续迭代30次l m 值不变即认为满足迭代终止条件㊂运行程序对控制参数进行初始化,并进行优化计算㊂可以得到如图8(c)~(d)所示的最优设计方案,其对应的最优控制参数及最优值如表2项目5和表3所示㊂同时,可以绘制出如图10所示的l m 与迭代次数T 关系曲线㊂图10㊀l m 曲线Fig.10㊀l m curve4㊀结论1)通过加装自扶正设备实现自扶正等传统方法在考虑快艇的快速性和空间利用方面存在着不足之处㊂相较而言,本文利用无人快艇甲板不需要布放驾驶室及除用于无人驾驶通讯导航之外的设备等优势,结合以往自扶正设计的研究,运用参数化设计思想对快艇甲板曲面进行几何变换,提出一种符合自扶正要求的无人快艇设计方法㊂2)该方法运用有限个控制参数构建甲板曲面,由给定的快艇下艇体获取设计约束,并运用粒子群算法对优化问题进行求解,得到具有最大l m 值且满足自扶正要求的远海无人快艇设计方案㊂3)运用本文的方法在无人快艇的设计初期只需提供有限个约束条件内的控制参数便可以快速得到满足自扶正要求的优化设计方案;同时,运用该方法可以在不改变艇体快速性和操纵性的基础上,有效地实现自扶正功能;并且运用该方法进行无人快艇的自扶正设计,无需额外添加实现自扶正功能的设备,既节省了布置空间,又节约了增添自扶正设备的成本,且有效地拓展了水密甲板的功能㊂在计算复原力臂l 时,本文只考虑了横倾的情况㊂但是对于高速小艇而言,在横倾的同时会产生一定程度的纵倾㊂因此,在接下来的研究中,本课题将进一步考虑纵倾的影响,从而使计算结果更符合实际情况㊂参考文献:[1]YAN Rujian,PANG Shuo,SUN Hanbing,et al.Develop-ment and missions of unmanned surface vehicle[J].Journal of marine science and application,2010,9(4):451-457.[2]LIU Zhixiang,ZHANG Youmin,YU Xiang,et al.Un-manned surface vehicles:An overview of developments and challenges[J].Annual reviews in control,2016,41:71-93.[3]RENTZOW E,DEWITZ D,KUROWSKI M,et al.Designand automation of an ocean-going autonomously acting USV [C]//OCEANS 2015-Genova.Genoa,2015:1-6.[4]LEVANDER O.Autonomous ships on the high seas [J].IEEE spectrum,2017,54(2):26-31.[5]GRENESTEDT J,KELLER J,LARSON S,et al.LORCA:a high performance USV with applications to surveillanceand monitoring [C]//2015IEEE International Symposiumon Safety,Security,and Rescue Robotics.West Lafayette,2015:1-6.[6]AKYILDIZ H,ŞIMŞEK C.Self-righting boat design [J].Gemi insaati ve deniz bilimleri dergi,2016(6):41-54.[7]景帅文,赵自奇.高速艇自扶正计算及优化[J].广船科技,2016,36(2):1-6.JING Shuaiwen,ZHAO Ziqi.Calculation and optimizationof high speed craft self-righting[J].GSI shipbuilding tech-nology,2016,36(2):1-6.[8]HARDING J E,SHEPHERD P.Meta-parametric design[J].Design studies,2017,52:73-95.[9]OXMAN R.Thinking difference:theories and models ofparametric design thinking[J].Design studies,2017,52:㊃6621㊃第9期林焰,等:远海无人快艇的自扶正优化设计方法4-39.[10]LIANG Zhengxuan,YAN Lin,SHANG Jizhuo.Collabora-tive multidisciplinary decision making based on game theo-ry in ship preliminary design[J].Journal of marine sci-ence and technology,2009,14(3):334-344. [11]PRIFTIS A,BOULOUGOURIS E,TURAN O,et al.Par-ametric design and multi-objective optimisation of contain-erships[J].Ocean engineering,2018,156:347-357.[12]仵大伟.船体曲面表达与三维船舶设计研究[D].大连:大连理工大学,2002.WU Dawei.Study on representation of ship-hull surface and three dimensional modeling design[D].Dalian: Dalian University of Technology,2002. [13]于雁云,林焰,纪卓尚.船体曲面参数化设计新方法[J].中国造船,2013,54(1):21-29.YU Yanyun,LIN Yan,JI Zhuoshang.A new method for parametric design of hull surface[J].Shipbuilding of China,2013,54(1):21-29.[14]SHAMSUDDIN S M,AHMED M A,SMIAN Y.NURBSskinning surface for ship hull design based on new parame-terization method[J].The international journal of advanced manufacturing technology,2006,28(9/10): 936-941.[15]于雁云,林焰.船舶与浮式海洋结构物参数化设计[M].北京:国防工业出版社,2014:23-28.WANG Yanyun,LIN Yan.Parametric design of ship and floating ocean structure[M].Beijing:National Defense Industry Press,2014:23-28.[16]BRAKKE K A.The motion of a surface by its mean curva-ture(MN-20)[M].Princeton:Princeton University Press,1978:16-22.[17]林焰,陈明,王运龙,等.船舶设计原理[M].3版.大连:大连理工大学出版社,2011:35-39.LIN Yan,CHEN Ming,WANG Yunlong,et al.The prin-ciples of ship design[M].3rd ed.Dalian:Dalian Univer-sity of Technology Press,2011:35-39. [18]盛振邦,刘应中.船舶原理-上册[M].上海:上海交通大学出版社,2003:79-87.[19]张宏伟,金光日,施吉林,等.计算机科学计算[M].2版.北京:高等教育出版社,2013:176-177. [20]包子阳,余继周.智能优化算法及其MATLAB实例[M].北京:电子工业出版社,2016:103-122. [21]LIN Qiuzhen,LIU Songbai,ZHU Qingling,et al.Particleswarm optimization with a balanceable fitness estimation for many-objective optimization problems[J].IEEE transactions on evolutionary computation,2018,22(1):32-46.本文引用格式:林焰,徐兴昂,叶超.远海无人快艇的自扶正优化设计方法[J].哈尔滨工程大学学报,2020,41(9):1261-1267.LIN Yan,XU Xingang,YE Chao.Self-righting optimization design for an unmanned speedboat on the high seas[J].Journal of Harbin Engineering Uni-versity,2020,41(9):1261-1267.㊃7621㊃。