Falcon4 BMS 4.33 的地形跟踪雷达与红外前视系统的说明!
- 格式:doc
- 大小:771.00 KB
- 文档页数:3
战地行动:FALCON 4.0 盟军(BMS版)第一章:学习如何飞行本手册的第一部分由一系列训练任务组成。
这些任务可在游戏的训练(Training)菜单中找到,手册提供对应的任务描述和操作指令。
训练任务为目标派遣模式,每个任务会教给你不同的技能。
其中包含一切能帮助你达成学习目标的必要操作。
事先说明一点,这些训练任务是环环相扣的。
如果你跳过一些基础任务而直接去飞高级任务,可能会遇到困难。
3 l2 s- Q; {0 ?4 }$ |5 k3 ?综述这些训练任务能让你像真正的F-16飞行员那样去学习F-16驾驶。
FalconBMS是有史以来最真实的飞行模拟游戏,包含了不同的难度层级来辅助新飞行员。
由于操作F-16各个系统所需的技能和知识学起来并不容易,需要时间和努力才能融会贯通。
因此,你最好跟着手册一步一步学习。
! b# r% @. k7 s% x' ?6 v任务1:基础飞行控制此任务的目标是学习如何控制F-16。
当你完成这个任务,你会知道F-16是如何响应你的操作,以及飞机能做出什么样的动作。
如果飞行员控制不了飞机,拿一架数千万美元的战机对抗敌人是毫无意义的。
此任务是一系列飞行控制训练的第一步,它们是按照美国空军的真实F-16训练大纲编写的,称为“TR-1”或“换装批次1(Transition Sortie 1)”。
请注意,当一个飞行员开始飞F-16的时候,他或她已经能驾驶其他几种飞机了。
你可能是个有经验的现实飞行员,也可能是个点错图标的3岁小孩,所以我们会从每个基础环节慢慢讲起。
如果你觉得这些你都会,可直接进入下一个任务。
3 c) p+ E7 |+ w9 i# _) o在FalconBMS中驾驶飞机或是驾驶真正的F-16并不是那么难。
但驾驶飞机作战却是另一回事。
像F-16这样的现代战机很容易驾驶,但用来作战却相当困难。
现代战机有成吨的信息需要飞行员处理,再加上越来越高的飞行速度,空战节奏之快几乎超过人类的能力极限。

美国导弹防御系统全域红外探测装备发展、体系分析及能力预测范晋祥中国航天科技集团公司八院八部摘要:红外探测跟踪系统在美国目前部署的弹道导弹防御体系中,尤其在弹道导弹发射早期预警和动能拦截弹高精度制导等方面,起着关键的作用。
为了进一步完善和改进其弹道导弹防御体系,近年来美国正在进一步发展新一代的弹道导弹防御红外系统与技术,正在大力发展改进弹道导弹发射早期预警能力的天基高轨道红外预警系统,发展旨在实现对弹道导弹威胁的全弹道(从助推段到中段、末段)监视跟踪的空间监视与跟踪系统,发展先进的、高性能大规格红外焦平面阵列、双色(多色)大规格红外焦平面阵列以提高星载红外告警系统、天基监视与跟踪系统以及动能拦截弹红外导引头的性能,发展用于拦截效果评估和弹道导弹发射早期预警性能改进的先进的多光谱、超光谱探测技术,此外还在发展用于弹道导弹防御的机载红外探测系统,以构建包括天基高轨早期预警、天基低轨全弹道跟踪、机载助推段、上升段跟踪和弹载跟踪导引的弹道导弹防御全域红外探测武器装备。
本报告概述了近年来美国弹道导弹防御系统中红外系统与技术的新进展,分析了美国弹道导弹防御系统的全域红外探测武器装备的体系构成,预测了美国未来弹道导弹防御系统红外探测装备的能力。
关键词:弹道导弹防御系统、导弹防御、预警卫星、空间目标监视与跟踪系统、动能拦截器、导引头、红外、焦平面阵列1 弹道导弹防御红外探测、跟踪系统发展简况红外探测跟踪系统与动能拦截弹红外导引头在美国目前部署的弹道导弹防御系统中起着举足轻重的作用,天基红外预警系统是导弹防御系统实现对弹道导弹发射的早期预警的关键,是确保实施成功拦截的先决条件,而动能拦截器红外导引头则是拦截目标的关键。
然而,美国目前部署的弹道导弹防御系统仅具备初始作战能力,尚不具备助推段、上升段防御能力,以地基、海基雷达为主的弹道导弹防御探测跟踪传感器不具备对弹道导弹威胁的全球范围内的持久监视、跟踪能力,而且原有的天基红外预警系统也存在着一些固有的缺点,如不能跟踪中段飞行的导弹,对国外设站的依赖性大,在南北极地区存在一些无法监视的盲区,星上红外探测器扫描速率低、频段少,对射程近的战区导弹难以给出充足的预警时间,虚警问题始终未得到根本解决,目前装备的动能拦截弹也存在着识别能力不足的缺点。

BMS4.33中文手册缩写对照BMS4.33中文飞行手册缩写对照A/P Autopilot自动驾驶ACM Air Combat Maneuvering空战机动AD Arming Delay触发延迟ADC空气数据计算机ADI Attitude Direction Indicator姿态指示仪ADV Advisory告警AGL Above Ground Level离地高度ALS Approach Lighting System进近灯光系统AOA Angle of Attack攻角AR Automatic Radar自动雷达ARI Aileron Rudder Interconnect副翼舵互连ASC Attack Steering Cue攻击操作提示A-SEC Allowable Steering Error Circle允许操作误差环ATC Air Traffic Control航空交通管制AVTR Airborne Video Tape Recorder 机载磁带录像机AWACS Airborne Warning And Control System机载报警与控制系统BA Burst Altitude爆裂高度BATR Bullets At Target Range目标范围弹药覆盖BI Burst Interval释放间隔BIT Built-In Tests内置测试BQ Burst Quantity释放数量BRAA Bearing And Range方位和距离CADC空气数据中央计算机CARA Combined Altitude Radar Altimeter组合雷达高度计CAS Calibrated Airspeed校正空速CBU Cluster Bomb Units集束炸弹CCIP Continuously Computed Impact Point连续计算命中点CCRP ContinuouslyComputed Release Point连续计算投放点CCUCockpit Control Unit驾驶舱控制单元CDI航道偏离指示器CG Center of Gravity重心CMDS Countermeasures Dispenser System干扰分配系统CMS Countermeasures Management Switch对策管理开关CNI Communication, Navigation & Identification通信、导航与识别CRM Combined Radar Modes组合雷达模式CRS Course航线DA Direct Access直接访问DBS Doppler Beam Sharpening多普勒波束锐化DBU Digital Backup数字备份DCS Data Command Switch数据命令开关DEC Digital Electronic Control 数字电子控制DED Data Entry Display数据输入显示器DEEC Digital Electronic Engine Control数字式电子引擎控制DLZ Dynamic Launch Zone动态发射区DME测距仪DTC Data Transfer Cartridge数据传输盒DTE Data Transfer Equipment数据传输设备DTE Data Test Loading数据测试加载DTOS Dive Toss俯冲投弹DTU Data Transfer unit数据转换装置DWAT Descent Warning After Takeoff起飞后的下降告警ECCM Electronic Counter-Countermeasures电子反对抗ECM Electronic Counter Measures电子对抗措施ECS Environmental Control System环境控制系统EEGS Enhanced Envelope Gun Sight增强型封套机炮准星EGI Embedded GPS/INS嵌入式GPS/INS EGT Eexhaust Gas Temperature排气温度EHSI Electronic Horizontal Situation Indicator电子水平位置指示器ELEC Electrical电气EMCON Emission Control排放控制EOM Equations of Motion运动均衡EOR End of Runway跑道末端EPU Emergency Power Unit应急电力单元ETA Estimated Time of Arrival预计到达时间ETE Estimated Time Enroute预计飞行时间EWS Electronic Warfare System电子对抗系统FCC Fire Control Computer火控计算机FCR Fire Control Radar火控雷达FFP Fuel Flow Proportioner供油调节器FLCC Flight Control Computer飞控计算机FLCP Flight Control Panel飞行控制面板FLCS Flight Control System飞控系统FLIR Forward Looking Infra Red 前视红外仪FOS Fuel Onboard at Station到达导航点剩余油量FOV Field of View视场FPM Flight Path Markers飞行路径指示器FTIT Fan Turbine Inlet Temperature涡轮进气口温度FTT Fixed Target Track固定目标追踪GM Ground Mapping地图标记GMT Ground Moving Target地面移动目标GP General Purpose通用GS Glideslope下滑道GW Gross Weight总重量HAD HARM Attack Display HARM攻击显示器HARM High Speed Antiradiation Missile高速反辐射导弹HAS HARM as Sensor HARM自感知HDG Heading航向HMC HUD Mark Cue HUD标记符HMCS Helmet Mounted Cueing System头盔提示系统HMPT Home Point基地HOBO homing bomb制导炸弹HOTAS Hands On Throttle And Stick握杆操作HSD Horizontal Situation Display水平态势显示器HSI Horizontal Situation Indicator水平位置指示器HTS HARM Targeting Systems HARM瞄准系统HUD Heads Up Display平视显示器IAS Indicated Airspeed指示空速ICP Integrated Control Panel综合控制面板IDM Improved Data Modem改进型数据机IFA In-Flight Alignment空中校准IFF Identification Friend of Foe敌我识别IFI In-Flight INS Alignment INS空中校准IFR Instrument Flight Rules仪表飞行规则ILS Instrument Landing System仪表着陆系统IM Inner Marker内指点标IMC Instrument Meteorological Conditions仪表气象条件INS惯性导航系统IP Visual Initial Point sighting视觉初始瞄准点JFS Jet Fuel Starter喷气燃料启动器JMR Jammer干扰器LADD Low Altitude Drogue Delivery低空引导伞投放LAND Landing降落LCO Limit Cycle Oscillation极限环震动LEF Leading Edge Flaps前缘襟翼LGB Laser Guided Bombs激光制导炸弹LIT LOOK - INTO - TURN注视,进入,转弯LOC Localizer定位信标LOS Line Of Sight瞄准线MFD Multi Function Display多功能显示器MFL Maintenance Fault List维修故障列表MIL Military Power(Thrust)军推MISC Miscellaneous各种各样的MLG Main Landing Gears主起落架MM Middle Marker中指点标MMC Modular Mission Computer模块化任务计算机MPO Manual Pitch Override手动俯仰超控电门MSA Minimum Safe Altitude最低安全高度MSL Mean Sea Level平均海平面NLG Nose Wheel鼻轮NWS Nose Wheel System鼻轮系统OA1/OA2Offset Aimpoint sighting偏移瞄准点瞄准OFP Operational Flight Program作战飞行程序OM Out Marker外指点标OPR Optical Pattern Recognition光学模式识别OPS Operations作战行动OSB Option Selection Button项目选择按钮PAPI Precision Approach Path Indicator精密进近航道指示器PFL Pilot Fault List飞行员故障清单PFLD Pilot Fault List Display飞行员故障清单显示器PGCAS Predictive Ground Collision Avoidance System预测地面防撞系统PMG Permanent Magnet Generator永磁发电机POS Position Known已知目标位置POV Point of View视角PPT Pre-Planned Steerpoint预设导航点PPTs Pre-Planned Threat Points预设威胁点PRF Pulse Repetition Frequency脉冲重复频率PUAC Pull-Up Anticipation Cue拉起预测提示PUP Pull Up Point拉起点QFE Query Field Elevation场面气压QNE Query Normal Elevation标准大气压QNH Query Normal Height修正海平面气压RALT Radar Altimeter雷达高度计RAM air冲压空气RCCE Reconnaissance侦察RCR Runway Condition跑道状况Rmax Range Maximum最大射程RPM Revolutions Per Minute转数/分RSU Rate Sensor Unit速度传感器单元RWR Radar Warning Receiver雷达告警接收机RWS Range While Search搜索测距SA Situational Awareness态势感知SCP Set Clearance Plane设定安全平面SFO Simulated Flameout模拟熄火SI Sequence Interval序列间隔SMS Stores Management System挂载管理系统SOI Sensor of Interest传感器关注SOP Standard Operating Procedure标准操作程序SPI Point Of Interest关注点SQ Sequence quantity序列数量SSC Sidestick Controller侧控制杆导航点和目标直接瞄准点STP/TGT Steerpoint and Target Direct Aimpoint sightingSTT Single Target Track单目标追踪TACAN Tactical Air Navigation System战术空中导航系统(塔康)TAS True Airspeed真实空速TD Target Designator目标指示器TE Tactical Engagement战术作战TEF Trailing Edge Flaps后缘襟翼TFR Terrain Following Radar地形跟踪雷达TGP Targeting Pod瞄准吊舱TISL Target Identification Set, Laser目标识别设置、激光照射TOF Take Off起飞TOS Time Over Steerpoint转向点时间TWA Threat Warning Aux辅助威胁告警TWP Threat Warning Prime主要威胁告警TWS Threat Warning System威胁告警系统TWS Track While Scan追踪扫描UFC Up Front Controller前上控制器UHF UltraHigh Frequency超高频ULS/LRS Long Range Scan长距离扫描USAF United States Air Force美国空军VAH Velocity, Altitude and Heading速度、高度和航向VFR Visual Flight Rules目视飞行规则VHF Very High Frequency甚高频VIP Visual Initial Point Sighting初始瞄准点VMC Visual Meteorological Conditions目视气象条件VMS Voice Messaging System语音信息系统VMU Voice Message Unit语音信息单元VNE Velocity Never Exceed不可逾越速度VRP Visual Reference Point Sighting目视参考点VSR/VS Vertical Search垂直扫描VV Vertical Velocity垂直速率VVI Vertical Velocity Indicator垂直速度指示器WOW Weight On Wheels起落架负重。
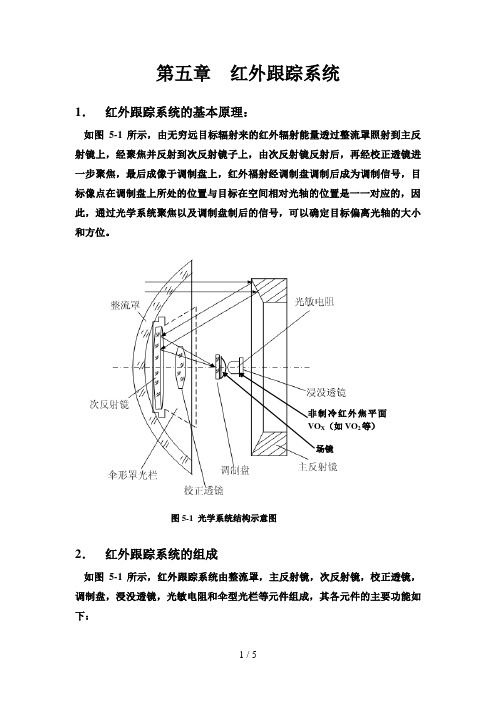
第五章红外跟踪系统1.红外跟踪系统的基本原理:如图5-1所示,由无穷远目标辐射来的红外辐射能量透过整流罩照射到主反射镜上,经聚焦并反射到次反射镜子上,由次反射镜反射后,再经校正透镜进一步聚焦,最后成像于调制盘上,红外福射经调制盘调制后成为调制信号,目标像点在调制盘上所处的位置与目标在空间相对光轴的位置是一一对应的,因此,通过光学系统聚焦以及调制盘制后的信号,可以确定目标偏离光轴的大小和方位。
非制冷红外焦平面VO X(如VO2等)图5-1 光学系统结构示意图2.红外跟踪系统的组成如图5-1所示,红外跟踪系统由整流罩,主反射镜,次反射镜,校正透镜,调制盘,浸没透镜,光敏电阻和伞型光栏等元件组成,其各元件的主要功能如下:1)、整流罩:是一个半球形同心透镜,作为导弹头部的外壳。
它是一块负透镜,其作用为校正主反射镜的球差及作导引头的密封。
整流罩在导引头工件波段内有高的透过性能,亦即吸收、反射作用很小。
这种导弹的整流罩采用氟化镁多晶制成。
耐高温、机械强度高。
2)、主反射镜:起聚焦作用,它给整个光学系统带来正球差。
焦距f'=41.18mm,直径47.2mm,材料为K8玻璃,凹面上真空镀铝以减少入射辐射能损失。
3)次反射镜:用来折叠光路,同样为K8玻璃,表面镀铝。
4)校正透镜:用来把伞形光阑、平面反射镜等零件与镜筒连接在一起,起支撑作用。
另一方面因消除像差的需要而在次镜之后加入这样一个凸透镜,可以进一步消除剩余像差。
支撑透镜材料为氟化镁多晶。
5)伞形光阑:限制目标以外的杂散光线直射入系统光敏元件上的辅助光阑。
为了更有效地消除杂散光,伞形光阑上设有消光槽,各元件不通光部分都进行黑化处理。
6)场镜:可把通过调制盘的辐射能会聚到探测器光敏层上;另一方面,加入场镜后原来经物镜聚焦的照度不均匀的目标像斑,经焦面后发散的光线折向光轴,使光能均匀地分布在探测器的光敏层上。
场镜采用平凸透镜。
场镜材料为氟化镁单晶,在工作波段内有良好的透过率(一般紧贴调制盘后面)。

四线激光雷达原理
四线激光雷达(Four-Line Lidar)是一种用于测量距离和速度的激光雷达系统,它使用了四个发射器和一个接收器。
其原理如下:
1.发射器:四线激光雷达中有四个发射器,每个发射器都发射一个脉冲激光束,这四个激光束以一定的时间间隔依次发射。
2.接收器:激光雷达的接收器位于发射器的对面,它能够接收到发射器发射的激光束并记录下每个激光束的到达时间。
3.时间测量:通过测量每个激光束的到达时间,可以计算出每个激光束的传播时间,从而计算出每个激光束的传播距离。
因为每个激光束的发射时间是已知的,所以可以计算出每个激光束的传播速度,也就是目标物体的距离和速度信息。
4.数据处理:通过对多个激光束的测量结果进行处理,可以得到目标物体的三维坐标和速度信息。
四线激光雷达的优点是测量速度快、精度高、可靠性强,并且可以在多种环境下进行测量。
它广泛应用于自动驾驶、机器人导航、工业自动化等领域。
面向空地应用的红外时敏目标检测跟踪数据集
傅瑞罡;范红旗;朱永锋;回丙伟;张志龙;钟平;李冬冬;张少良;陈刚;王雒
【期刊名称】《中国科学数据:中英文网络版》
【年(卷),期】2022(7)2
【摘要】本数据集是一个面向红外时敏目标检测跟踪应用,以车辆为探测目标,以地面场景为探测背景的图像序列数据集。
本数据集共计21750帧图像,89174个目标,组成了87段视频序列、393段目标轨迹。
数据集的每帧图像对应一个标注文件,标注文件标记了图像中每个感兴趣时敏目标的ID号及其位置信息,可为红外时敏目标检测跟踪、红外时敏目标特性等研究提供基础数据。
【总页数】16页(P203-218)
【作者】傅瑞罡;范红旗;朱永锋;回丙伟;张志龙;钟平;李冬冬;张少良;陈刚;王雒
【作者单位】国防科技大学电子科学学院ATR重点实验室;武汉高德红外股份有限公司
【正文语种】中文
【中图分类】TP3
【相关文献】
1.面向地面时敏目标跟踪的多传感器智能切换技术
2.VDK实时内核在红外目标检测跟踪系统中的应用
3.面向空地协同作战的无人机-无人车异构\r时变编队跟踪控制
4.地/空背景下红外图像弱小飞机目标检测跟踪数据集
5.地/空背景下红外图像弱小飞机目标检测跟踪数据集
因版权原因,仅展示原文概要,查看原文内容请购买。
FLIR® Camera IntegrationGuideFLIR® Camera IntegrationFLIR® is a camera manufacturer specializing in Marine/Military grade night vision and thermal video cameras.Navico is introducing control integration of a certain range of FLIR® Pan Tilt Zoom cameras with certain Navico multifunction displays. This manual details how to setup the camera in order to receive control commands from a Simrad multifunction displaysCompatibility. At the time this document was written the following models of FLIR® cameras can be used: Updated compatible camera list as of September 2018* Video over IP is not supported at present. A FLIR IP Video to Analog Converter is requiredPre requisitesFLIR Software VersionFlir Camera Systems that shipped prior to Aug 2013 will require a M-Series software update to Nexus 2.5.9.17 or later. The update procedure for an M-Series is not automated and requires a manual upload using a PC. Please contact FLIR directly if a software update is required at1-888-747-3547”MFD compatibilityThe cameras can integrate to following Simrad Navigation systems with compatible software. NSO evo3NSS evo3NSO-evo2 with RTM 1 software or aboveNSS evo 2 with RTM 1 software or aboveNSE with RTM 4.0 software or aboveNSS with RTM 3.0 software or aboveWith a WIFI-1module Without a WIFI-1 moduleWIFI-1 acts as a DHCP server and assigns an IP address to the camera No DHCP server on the network. The MFDs won’t be able to control the cameraNo additional setup required Set Static Address in the camera Tools RequiredPC with Windows 7 or later.Ethernet patch cable (not crossover)Microsoft Internet explorer web browserSystems without a WIFI-1 module (no DHCP)If a FLIR® Camera is installed into a system without a WIFI-1 module, it will not be automati-cally be recognized by the Multifunction Displays (MFDs) as the FLIR® camera expects to get an IP address assigned from a DHCP server and the MFDs will not be able to control the camera.In order for the MDFs to be able to control the pan tilt zoom of the FLIR® camera, the camera will need to be confi gured with a static IP address in the ZeroConfi g subnet. The Flir camera must have a software version greater than “Nexus 2.5.9.17” Please contact FLIR® for further information 1-888-747-3547 and upgrade information.Give the camera a Static IP addressTo browse to the FLIR® web interface, you will fi rst need to discover FLIR®’s current IP address.Determine the IP address of the camera1 Connect the FLIR® Camera directly to the computer via Ethernet. Disable the computer’s Wi-fi adapterso the camera and the computer are the only devices on the networkFLIR M-SERIES CAMERAType F ConnectorEthernet Cable2 Apply power to the camera and wait for the camera to initialize itself1If necessary enable network discovery. A message will appear prompting you2 In the “Home or Work” profile turn on network discovery.3If prompted only enable network discovery on private networks4The camera should now appear under other devices5 Double click on the device. This will open the camera’s built in web page in your default web browser. Note: If your default web browser is not Microsoft Explorer the web interface may not workcorrectly. Copy the url and paste into Microsoft ExplorerMicrosoft Internet supported Web browsers include Microsoft Internet Explorer version 7 or 8 on PC platforms running Microsoft Windows. Internet Explorer 8 may have to be confi gured3 Open Windows Explorer.4Click on Networkto run in compatibility mode.Set the Static IP address1 Click on Network Setup.2 Select the Static radio button3 Set the IP Address to 169.254.xxx.xxx (xxx= number between 1 and 254) e.g 169.254.88.884 Set sub mask to 255.255.0.05 Click on the save button6 Disconnect the laptop7 Reconnect the camera to Simrad Ethernet network8 Power on the system and check operation.Analog Video Camera with Control over EthernetSystem with a WIFI-1 module should not require and additional setup18966662345101112137771FLIR® M Series (analog video) Camera2FLIR® Joystick Control Unit (JCU) (Requires Power over Ethernet from PoE injector (PN 4113746)3FLIR® Power over Ethernet Power (PoE) Power supply PN 4113746. See Flir manual for more information on power 4NSO evo2 Processor5SimRad MFD running compatible Software NSO evo3, NSS evo3, : NSS evo2, NSE>v4.0, NSS >v3.063rd party network cable for PoE devices (ieee802.3Af ) 8 conductor T568B, Ethernet, double shielded FLIR® PN 308-0163-25 or equivalent.Note: to maintain IEC 60945 EMI compliance, use of a double shielded cable is required.7Navico Ethernet cable 5 Pin Yellow. Choice of000-0127-51: 1.8m (6ft) , 000-0127-29: 4.5m (15ft) , 000-0127-30: 7.5m (25ft) 000-0127-37: 15.15m (50ft)8WIFI-1 Module. Acts as DHCP server and simplifi es software integration to the FLIR® Camera (recommended)9Optional Ethernet switch. NEP-2, StructureScan, SonarHub 10000-14552-001/ Ethernet adapter 1.5 m (4.9 ft) OR 000-0127-56/ Ethernet adapter 2.0 m (6ft)11FLIR® RJ45 IPX6 Cable Joiner 12Composite video cable BNC13Composite video cable to other MFDs. (RCA) NSS series require additional video data cable (000-00129-001)I P Camera integrationNSO evo2HA Simrad NSO evo 3B Joystick control unit (JCU-3) A80510C --M132 Thermal tilt-only, night-vision IP video camera --M232 Thermal pan-and-tilt, night-vision IP video camera DRayNet to RayNet cable.--Right angle Qnt. 1 included with the camera 10 m (33 ft)--Qnt. 1 included with JCU-3, 2 m (6.6 ft)E BNC to BNC Analog video cable (third party) OR “F” belowF RJ45-RJ45 cable 7.5 m ( 25 ft) FLIR part (308-0163-25)GRayNet to RJ45 Adapter cable--Qnt. 1 supplied with the camera 100 mm (4”)--Qnt. 1 supplied with JCU-3 100 mm (4”)H FLIR PoE switch. Available in 5, 8 and 16 port or refer to the FLIR installation manual regarding powering the camera systemIIP video decoder (A80508)NSS evo3IA Simrad NSO evo 3B Joystick control unit (JCU-3) A80510C --M132 Thermal tilt-only, night-vision IP video camera --M232 Thermal pan-and-tilt, night-vision IP video camera DRayNet to RayNet cable.--Right angle Qnt. 1 included with the camera 10 m (33 ft)--Qnt. 1 included with JCU-3, 2 m (6.6 ft)E BNC to BNC Analog video cable (third party) OR “F” belowF HDMI Cable OR “E” aboveG RJ45-RJ45 cable 7.5 m ( 25 ft) FLIR part (308-0163-25)HRayNet to RJ45 Adapter cable--Qnt. 1 supplied with the camera 100 mm (4”)--Qnt. 1 supplied with JCU-3 100 mm (4”)I FLIR PoE switch. Available in 5, 8 and 16 port or refer to the FLIR installation manual regarding powering the camera systemJIP video decoder (A80508)NSS evo 3/2IA Simrad NSS evo 2 / NSS evo 3B Joystick control unit (JCU-3) A80510C -M132 Thermal tilt-only, night-vision IP video camera -M232 Thermal pan-and-tilt, night-vision IP video camera DRayNet to RayNet cable.-Right angle Qnt. 1 included with the camera 10 m (33 ft)-Qnt. 1 included with JCU-3, 2 m (6.6 ft)E RCA to BNC Analog video cable (third party)F IP video decoder (A80508)G RJ45-RJ45 cable 7.5 m ( 25 ft) FLIR part (308-0163-25)HRayNet to RJ45 Adapter cable--Qnt. 1 supplied with the camera 100 mm (4”)--Qnt. 1 supplied with JCU-3 100 mm (4”)IFLIR PoE switch. Available in 5, 8 and 16 port or refer to the FLIR installation manual regarding powering the camera system 。
【Infra-redsearchandtracksystem】漫谈红外搜索和跟踪系统(IRS...编前语:闲扯之前,先更正一下昨日因偷懒而在发布中出现的错误:1、题图是搭载“爱立眼”系统的萨博2000预警机,而非文中主讲的“全球眼”预警机;2、最后的图注也是,应为“Erieye很帅的天使之翼”。
无他,一为偷懒,二则那张图确实很帅!感谢大师兄直斥其非、指正批评!防务菌2016.12.25红外搜索和跟踪系统(IRST)近期动态据c4isrnet报道,近日美国海军航空系统司令部授予波音公司8200万美元合同,为F/A-18E/F“超级大黄蜂”战斗机生产红外搜索和跟踪(IRST)系统。
这项工作预计在2020年1月前完成。
搭载于F/A-18E/F“超级大黄蜂”战斗机机腹的ISRT系统根据国防部合同公告,波音公司将提供12个低速率初始生产红外搜索和跟踪(IRST)系统。
IRST系统被设计用于探测机载威胁,对抗空对空导弹。
波音公司将提供12个低速率初始生产红外搜索和跟踪(IRST)系统装备于F/A-18E/F“超级大黄蜂”战斗机的红外搜索和跟踪系统(IRST)是一种被动、远距离传感器,可搜索和探测红外辐射,可同时跟踪多个目标,并提供高效空对空目标捕获能力。
搭载于ISRT系统的F/A-18E/F“超级大黄蜂”战斗机进行试飞该系统可使用户探测先进的威胁目标,即使对手装备了雷达干扰技术。
IRST可提供“先发现、先打击”能力,与飞机雷达协同工作,增强各种武器系统的性能。
主\被动探测与数据链工作模式2011年11月,波音公司就与美国海军签订了一份1.35亿美元的合同,设计并生产F/A-18E/F“超级大黄蜂”战斗机的红外搜索和跟踪系统。
按照当时的计划,红外搜索和跟踪系统将在2016年具备“初始作战能力”。
IRST系统探测头组件该合同的子合同承包商包括洛克希德·马丁公司、通用电气航空公司、Meggitt防御系统公司等。