线性系统的稳定性
- 格式:ppt
- 大小:1.16 MB
- 文档页数:32
信号与系统线性系统的稳定性线性系统的稳定性一、系统的因果性因果系统(连续的或离散的)指的是,系统的零状态响应不出现于激励之前的系统。
也就是说,对于(或)接入的任意激励,即对于任意的,(或) (8.7-1)如果系统的零状态响应都有,(或)(8.7-2)就称该系统为因果系统,否则称为非因果系统。
连续因果系统的充分必要条件是:冲激响应(8.7-3a)或者,系统函数的收敛域为 8.7-3b即其收敛域为收敛坐标以右的半平面,换言之,的极点都在收敛轴的左边。
离散因果系统的充分必要条件是:单位序列响应为(8.7-4a)或者,系统函数的收敛域为 (8.7-4b)即其收敛域为半径等于的圆外区域,换言之,的极点都在收敛圆内部。
现在证明连续因果系统的充要条件。
设系统的输入,显然在时,这时的零状态响应为,所以若系统是因果的,则必有。
因此,式(8.7-3a)是必要的。
但式(8.7-3a)的条件能否保证对所有满足式(8.4-1)的激励,都能满足式(8.4-2),即其充分性还有待证明。
对任意激励系统的零状态响应等于与的卷积,考虑到时,有如果满足式(8.4-3a),即有,那么当,上式为,当时,上式为即时,。
因而式(8.4-3a)的条件也是充分的。
根据拉普拉斯变换的定义,如果满足式(8.4-3a),则即式(8.4-3b)。
离散因果系统的充要条件的证明也上类似,这里从略。
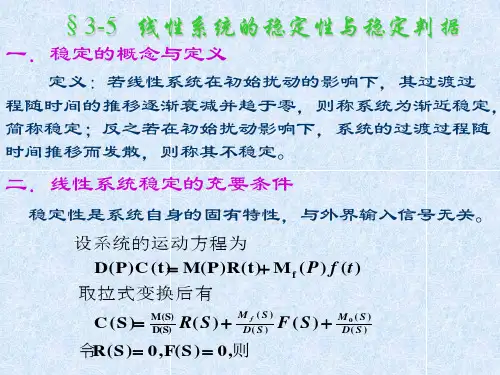
二、系统的稳定性在研究和设计各类系统中,系统的稳定性十分重要。
譬如,某连续时间系统的系统函数为当输入为单位阶跃函数时,系统零状态响应的象函数为考虑到,取上式的拉普拉斯变换,得上式的前两项是和衰减函数,此外还有一个正指数项,在较小时,这个正指数项可以忽略不计,可是,当很大时,这个正指数项超过其他项并随着的增长而不断增大。
实际的系统不会是完全线性的,这样,很大的信号将使设备工作在非线性部分,放大器的晶体管会饱和或截止,一个机械系统可能停止或发生故障等等。
这不仅使系统不能正常工作,有时还会发生损坏和危险,如烧毁设备等。
线性和非线性系统的稳定性和控制在控制系统中,线性和非线性系统是常见的两种形式。
线性系统具有可加性和比例性质,非线性系统则不满足这些性质。
在这篇文章中,我们将探讨线性和非线性系统的稳定性和控制,以及它们之间的差异。
1. 线性系统的稳定性和控制在线性系统中,当系统的输入和输出之间的关系满足线性方程时,我们可以使用线性的控制方法来调节其行为。
例如,当我们使用一个比例控制器来调节温度时,我们假设系统的响应是线性的。
这意味着,如果我们两倍地增加控制器的输出,系统的响应也会两倍增加。
线性系统的稳定性可以用传输函数的极点和零点来分析。
当传输函数的所有极点实部都小于零时,系统是稳定的。
如果有任何一个极点的实部大于零,系统就是不稳定的。
我们可以使用各种线性控制器来稳定系统,例如比例控制器、积分控制器和微分控制器。
2. 非线性系统的稳定性和控制对于非线性系统,它们的行为是更加复杂的。
它们不具有可加性和比例性质,这意味着我们无法使用线性控制方法来调节系统行为。
例如,在一个非线性电路中,如果我们将输入信号的幅度加倍,输出信号的幅度可能会非常不同。
非线性系统的稳定性也比线性系统更加复杂。
我们不能简单地使用传输函数的极点和零点来分析系统的稳定性。
相反,我们需要使用更高级的数学工具,例如李雅普诺夫稳定性理论。
该理论使用能量函数来分析系统的行为,从而判断系统是否稳定。
我们可以使用各种非线性控制器来调节非线性系统,例如反馈线性化控制和滑动模态控制。
3. 线性系统和非线性系统的不同在稳定性和控制方面,线性系统和非线性系统之间存在显著的差异。
线性系统具有可加性和比例性质,可以方便地使用传输函数来分析稳定性和设计控制器。
然而,非线性系统不具备这些特性,需要使用更高级的数学工具来分析稳定性和设计控制器。
此外,非线性系统可能会表现出一些奇异的行为,例如混沌和周期性振荡。
这些行为是线性系统所不具有的,因为线性系统的行为是可预测的和稳定的。
对于非线性系统,我们需要更加小心地分析其行为,以确保系统的稳定性和符合我们的预期。
线性系统的稳定性分析与判据稳定性是线性系统分析中的重要概念,它描述了系统在输入和干扰下的响应是否趋于有界。
稳定性分析和判据在控制工程、通信工程等领域具有广泛的应用。
本文将介绍线性系统稳定性的基本概念、分析方法和判据。
一、线性系统稳定性的基本概念线性系统由一组线性方程表示,可用状态空间模型描述。
在进行稳定性分析之前,我们先来了解一些基本概念。
1. 输入与输出:线性系统接收一个或多个输入信号,并产生相应的输出信号。
输入和输出可以是连续的信号或离散的序列。
2. 状态:系统的状态是指能够完全描述系统行为的一组变量。
状态可以是连续的或离散的,通常用向量表示。
3. 零状态响应与完全响应:零状态响应是指系统在无外部输入的情况下的输出。
完全响应是指系统在有外部输入的情况下的输出。
4. 稳定性:一个线性系统是稳定的,当且仅当其任何有界的输入所产生的响应也是有界的。
如果系统输出在有界输入下有界,我们称系统是BIBO(Bounded-Input, Bounded-Output)稳定的。
二、系统稳定性的分析方法稳定性分析主要通过判定系统的特征值来实现。
系统的特征值决定着系统的响应特性,在稳定性分析中起着关键作用。
1. 特征值分析:特征值是描述系统动态特性的重要指标。
对于连续系统,特征值是状态方程的解的指数项;对于离散系统,特征值是状态方程的解的系数。
通过计算特征值,可以判断系统的稳定性。
2. 极点分析:极点是特征值的实部和虚部共同确定的。
稳定系统的特征值的实部都小于零,不稳定系统至少有一个特征值的实部大于零。
3. 频域分析:稳定性分析还可以通过频域方法进行。
常见的频域分析方法包括幅频响应法和相频响应法。
通过分析系统的频率特性,我们可以得到系统的稳定性信息。
三、线性系统稳定性的判据除了特征值分析和频域分析,我们还可以利用一些判据来判断系统的稳定性。
1. Nyquist准则:Nyquist准则是常用的稳定性判据之一。
通过计算系统的传递函数在复平面上的闭合轨迹,可以判断系统的稳定性。
线性系统的稳定性分析与控制线性系统的稳定性是控制理论中的重要概念,对于系统设计和控制算法的选择具有重要的指导意义。
本文将对线性系统的稳定性分析与控制进行探讨,并介绍一些常用的稳定性分析方法和控制策略。
一、线性系统的稳定性分析线性系统的稳定性可以通过系统的特征方程来进行判断。
特征方程是描述系统动态行为的一个重要方程,其形式为 sI-A=0,其中s是复变量,I是单位矩阵,A是系统的状态矩阵。
1.定态响应法定态响应法是一种简单直观的稳定性分析方法。
通过对特征方程的根进行判断,可以得到系统的稳定性信息。
如果特征方程的所有根都具有负的实部,即根的实部小于零,那么系统是稳定的;如果特征方程存在根具有正的实部,那么系统是不稳定的。
2.奇异值分析法奇异值分析法是一种基于矩阵理论的稳定性分析方法。
通过计算系统的奇异值,可以得到系统的稳定性信息。
如果系统的奇异值都小于1,那么系统是稳定的;如果系统的奇异值存在大于1的值,那么系统是不稳定的。
3.频域分析法频域分析法是一种基于信号频谱的稳定性分析方法。
通过对系统的传递函数进行频谱分析,可以得到系统的稳定性信息。
如果系统的传递函数在整个频率范围内都满足 Nyquist 准则,即曲线不绕过点 (-1,0),那么系统是稳定的;如果系统的传递函数在某些频率点满足 Nyquist 准则,即曲线绕过点 (-1,0),那么系统是不稳定的。
二、线性系统的控制策略线性系统的控制旨在通过选择合适的控制策略来改变系统的动态特性,使系统满足设计要求。
1.比例控制器比例控制器是一种简单的控制策略,通过调整比例增益,使系统的输出与期望值之间保持一定的比例关系。
比例控制器可以用于稳定系统的稳态误差,并改善系统的响应速度。
然而,比例控制器无法消除系统的超调和振荡。
2.积分控制器积分控制器是一种通过积分操作来减小系统稳态误差的控制策略。
积分控制器可以消除系统的稳态误差,但会增加系统的响应时间。
同时,在实际应用中需要注意积分饱和现象的出现。
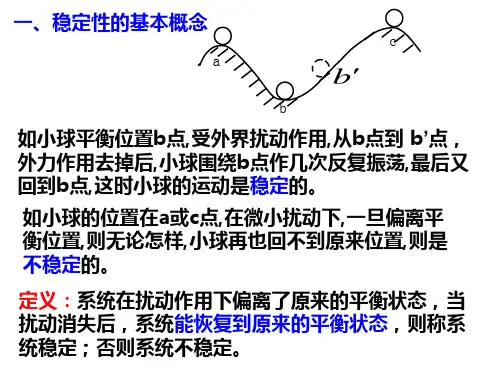
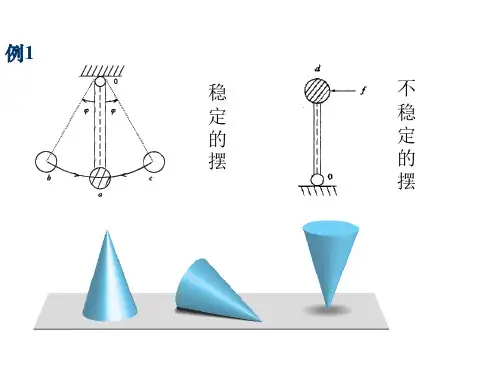
第三章 线性系统的稳定性分析3.1 概述如果在扰动作用下系统偏离了原来的平衡状态,当扰动消失后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的。
否则,系统不稳定。
一个实际的系统必须是稳定的,不稳定的系统是不可能付诸于工程实施的。
因此,稳定性问题是系统控制理论研究的一个重要课题。
对于线性系统而言,其响应总可以分解为零状态响应和零输入响应,因而人们习惯分别讨论这两种响应的稳定性,从而外部稳定性和内部稳定性的概念。
应用于线性定常系统的稳定性分析方法很多。
然而,对于非线性系统和线性时变系统,这些稳定性分析方法实现起来可能非常困难,甚至是不可能的。
李雅普诺夫(A.M. Lyapunov)稳定性分析是解决非线性系统稳定性问题的一般方法。
本章首先介绍外部稳定性和内部稳定性的概念及其相互关系,然后介绍李雅普诺夫稳定性的概念及其判别方法,最后介绍线性定常系统的李雅普诺夫稳定性分析。
虽然在非线性系统的稳定性问题中,Lyapunov 稳定性分析方法具有基础性的地位,但在具体确定许多非线性系统的稳定性时,却并不是直截了当的。
技巧和经验在解决非线性问题时显得非常重要。
在本章中,对于实际非线性系统的稳定性分析仅限于几种简单的情况。
3.2 外部稳定性与内部稳定性3.2.1 外部稳定:考虑一个线性因果系统,如果对一个有界输入u (t ),即满足条件:1()u t k ≤<∞的输入u (t ),所产生的输出y (t )也是有界的,即使得下式成立:2()y t k ≤<∞则称此因果系统是外部稳定的,即BIBO (Bounded Input Bounded Output )稳定。
注意:在讨论外部稳定性的时候,我们必须要假定系统的初始条件为零,只有在这种假定下面,系统的输入—输出描述才是唯一的和有意义的。
系统外部稳定的判定准则系统的BIBO 稳定性可根据脉冲响应矩阵或者传递函数矩阵来进行判别。
a) 时变情况的判定准则对于零初始条件的线性时变系统,设(,)G t τ为脉冲响应矩阵,则系统BIBO 稳定的充要条件是,存在一个有限常数k ,使对于一切0[,),(,)t t G t τ∈∞的每一个元0(,)(1,2,.......;1,2,.....)(,)ij tij t g t i q j p g t d k τττ==≤<∞⎰有即,(,)G t τ是绝对可积的。