实验五 线性系统的稳定性和稳态误差分析
- 格式:doc
- 大小:228.74 KB
- 文档页数:14
线性系统的稳定性分析实验报告本实验旨在对线性系统的稳定性进行分析,包括定义稳定性、利用极点分布法分析稳定性、利用本征模态分析稳定性、以及使用Matlab进行稳定性分析等内容。
一、实验背景稳定性是控制系统研究中一个非常重要的概念,它与系统的性能、可靠性、控制策略等密切相关。
简而言之,稳定性就是指当输入信号发生变化时,系统能否在一定时间范围内维持稳定状态。
对于线性系统,稳定性的分析可以通过系统的传递函数、本征模态等途径进行求解。
二、实验设备(1)计算机(2)Matlab软件三、实验过程及结果1.定义稳定性在控制系统稳定性分析中,一般都是针对线性时不变系统进行讨论。
对于线性时不变系统,我们可以采用两种常用的定义方法来判断其稳定性:(1)定义1:系统是稳定的,当且仅当系统的输入信号有界时,系统的输出信号也有界。
(2)定义2:系统是稳定的,当且仅当系统的特征方程所有极点的实部均小于0。
2.利用极点分布法分析稳定性极点分布法是一种常用的线性时不变系统稳定性分析方法,通过计算系统的特征方程的极点分布来判断系统的稳定性。
例如,现有一个传递函数为G(s)= 1/ (s+1)(s-2)的系统,可以写出系统的特征方程:s^2-s-2=0求解特征方程,得到系统的两个极点为s1=2,s2=-1,其中s2=-1的实部小于0,符合定义2的稳定性判断标准,因此该系统是稳定的。
3.利用本征模态分析稳定性本征模态是指一组特定的正交基,通过它们可以表示出系统的任意初始状态和任意输入下的响应。
因此,本征模态分解法是一种可以用来分析线性可逆系统稳定性的工具。
例如,现有一个传递函数为G(s)= 1/(s+3)的系统,对应的状态空间方程为:x(t+1)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)其中,A=[-3],B=[1],C=[1],D=0。
求解系统的本征值,得到该系统的特征根为-3,证明该系统是非常稳定的。
因此,该系统满足定义2的稳定性判断标准。
3.6线性系统的稳态误差一个稳定的系统在典型外作用下经过一段时间后就会进入稳态,控制系统的稳态精度是其重要的技术指标。
稳态误差必须在允许范围之内,控制系统才有使用价值。
例如,工业加热炉的炉温误差超过限度就会影响产品质量,轧钢机的辊距误差超过限度就轧不出合格的钢材,导弹的跟踪误差若超过允许的限度就不能用于实战,等等。
控制系统的稳态误差是系统控制精度的一种度量,是系统的稳态性能指标。
由于系统自身的结构参数、外作用的类型(控制量或扰动量)以及外作用的形式(阶跃、斜坡或加速度等)不同,控制系统的稳态输出不可能在任意情况下都与输入量(希望的输出)一致,因而会产生原理性稳态误差。
此外,系统中存在的不灵敏区、间隙、零漂等非线性因素也会造成附加的稳态误差。
控制系统设计的任务之一,就是尽量减小系统的稳态误差。
对稳定的系统研究稳态误差才有意义,所以计算稳态误差应以系统稳定为前提。
通常把在阶跃输入作用下没有原理性稳态误差的系统称为无差系统;而把有原理性稳态误差的系统称为有差系统。
本节主要讨论线性系统原理性稳态误差的计算方法,包括计算稳态误差的一般方法,静态误差系数法和动态误差系数法。
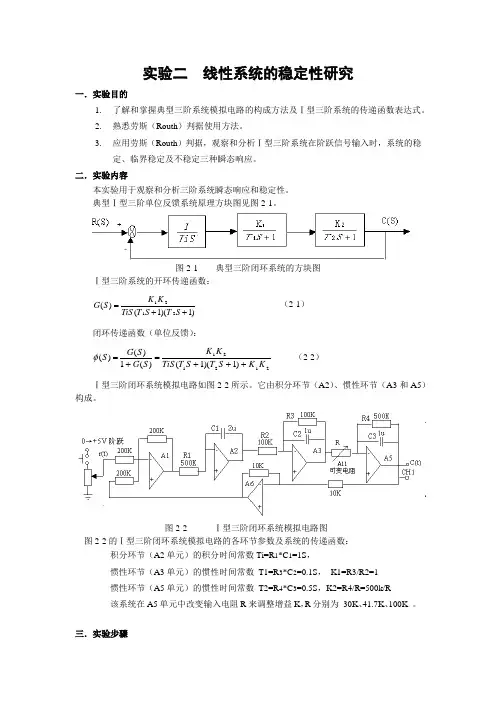
3.6.1 误差与稳态误差控制系统结构图一般可用图3-29(a)的形式表示,经过等效变换可以化成图3-29(b)的形式。
系统的误差通常有两种定义方法:按输入端定义和按输出端定义。
⑴按输入端定义的误差,即把偏差定义为误差,Hsss=(3-25)E-RC)()(s())(⑵按输出端定义的误差5758)()()()(s C s H s R s E -=' (3-26)按输入端定义的误差)(s E (即偏差)通常是可测量的,有一定的物理意义,但其误差的理论含义不十分明显;按输出端定义的误差)(s E '是“希望输出”)(s R '与实际输出)(s C 之差,比较接近误差的理论意义,但它通常不可测量,只有数学意义。
两种误差定义之间存在如下关系:)()()(s H s E s E =' (3-27) 对单位反馈系统而言,上述两种定义是一致的。
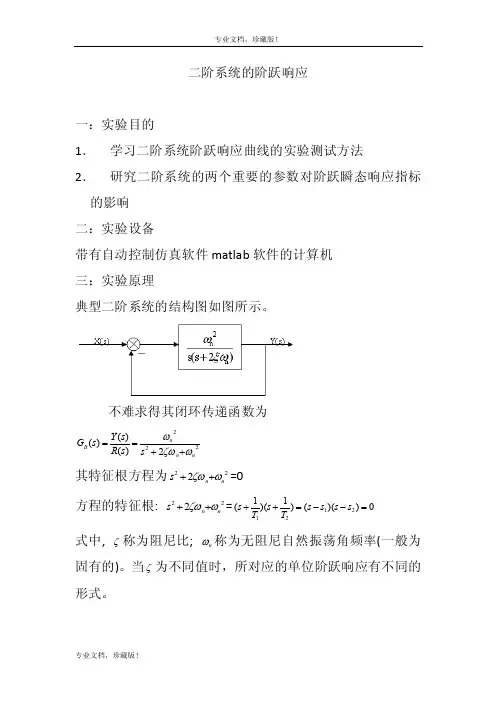
二阶系统的阶跃响应一:实验目的1. 学习二阶系统阶跃响应曲线的实验测试方法2. 研究二阶系统的两个重要的参数对阶跃瞬态响应指标的影响 二:实验设备带有自动控制仿真软件matlab 软件的计算机 三:实验原理典型二阶系统的结构图如图所示。
不难求得其闭环传递函数为2222)()()(n n n B s s R s Y s G ωζωω++==其特征根方程为222n n s ωζω++=0 方程的特征根: 222nn s ωζω++=0))(()1)(1(2121=--=++s s s s T s T s 式中,ζ称为阻尼比; n ω称为无阻尼自然振荡角频率(一般为固有的)。
当ζ为不同值时,所对应的单位阶跃响应有不同的形式。
四:实验内容研究特征参量ζ和n ω对二阶系统性能的影响标准二阶系统的闭环传递函数为:2222)()(nn n s s s R s C ωζωω++=二阶系统的单位阶跃响应在不同的特征参量下有不同的响应曲线。
我们研究ζ对二阶系统性能的影响,设定无阻尼自然振荡频率)/(1s rad n =ω,考虑3种不同的ζ值:ζ=0.2,0.4,1,利用MATLAB 对每一种ζ求取单位阶跃响应曲线,分析参数ζ对系统的影响。
五:仿真程序和结果图1、二阶系统阶跃响应曲线 程序 for j=1:1:3kais=[0.2,0.4,1]; w=[1/0.47,1/1,1/1.47]; subplot(3,1,j) hold on for i=1:3 num=w(j)^2;den=[1,2*kais(i)*w(j),w(j)^2]step(num,den);grid on endhold offend结果图2、变换ζ和ω的值:nfor j=1:1:3kais=[0.2,0.4,1];w=[1/0.47,1/1,1/1.47];subplot(3,1,j)hold onfor i=1:3num=w(i)^2;den=[1,2*kais(j)*w(i),w(i)^2]step(num,den);grid onendhold offend3、增加一组ζ值:for j=1:1:3kais=[0,0.2,0.4,1];w=[1/0.47,1/1,1/1.47];subplot(3,1,j)hold onfor i=1:4num=w(j)^2;den=[1,2*kais(i)*w(j),w(j)^2]step(num,den);grid onendhold offend结果图:分析:六:结论与收获 结论: (1) 当0=ζ时,输出响应为等幅振荡。
鱼陂科扶學院学生实验报告(理工类)学生学号: ________________________ 学生姓名: _______________________所属院部: 机电工程学院指导教师: 吴洪兵课程名称:自动控制原理 专业班级:14电气(220 15——20 16 学年第二学期金陵科技学院教务处制实验项目名称:线性系统稳态误差的研究实验学时:2同组学生姓名:__________________ 实验地点:PAC电气控制实验室实验日期:2016年6月2日实验成绩:__________________________________批改教师:吴洪兵批改时间: _____________________________一、实验目的和要求1熟悉线性系统;2熟悉线性系统稳态误差原因。
二、实验仪器和设备计算机一台三、实验过程在稳定的基础上,不仅要求系统具有较快的动态响应速度,还应具有令人满意的稳态控制精度。
稳态误差是系统控制精度的度量,它体现了系统进入稳态时,实际输出与希望输出之间的偏差。
系统的稳态误差既与系统的结构、参数有关,又受到外输入信号作用的影响,同时,系统静特性不稳定和参数变化等因素也会导致系统产生一定的稳态误差。
定义在输入端的误差:E(s)二R(s) - B(s)二Rs) - H(s)C(s)定义在输出端的误差:E(s)二G(s) -C(s)2%)G(s)__________ _______ J k ______ ■■ -- ■恥) ■N(s)=0 时, Rs)e ssr如果系统稳定,则sE (s )= |im1 1 G k (s )R (s )误差时域表达式为e(t) = r(t) — b(t),令t时,得稳态误差e ss = lim e(t)t T 30或-lim sE(s)S T O稳态误差e ss 可以用求S T 0时sE(s)的极限替代,通常E(s) 的解析表达式比e(t)的解析表达式更容易得到。
本科实验报告课程名称:自动控制原理实验项目:控制系统的稳定性和稳态误差实验地点:多学科楼机房专业班级:学号:学生姓名:指导教师:2012 年5 月15 日一、实验目的和要求:1.学会利用MATLAB 对控制系统的稳定性进行分析; 2.学会利用MATLAB 计算系统的稳态误差。
二、实验内容和原理:1.利用MATLAB 描述系统数学模型如果系统的的数学模型可用如下的传递函数表示nn n m m m a s a s b s b s b s U s Y s G ++++++==-- 11110)()()( 则在MATLAB 下,传递函数可以方便的由其分子和分母多项式系数所构成的两个向量惟一确定出来。
即num=[b 0,b 1 ,…, b m ]; den=[1,a 1,a 2 ,…,a n ]例2-1 若系统的传递函数为5234)(23+++=s s s s G 试利用MA TLAB 表示。
当传递函数的分子或分母由若干个多项式乘积表示时,它可由MA TLAB 提供的多项式乘法运算函数conv( )来处理,以获得分子和分母多项式向量,此函数的调用格式为 p=conv(p1,p2)其中,p1和p2分别为由两个多项式系数构成的向量,而p 为p1和p2多项式的乘积多项式系数向量。
conv( )函数的调用是允许多级嵌套的。
例2-2 若系统的传递函数为)523)(1()66(4)(232++++++=s s s s s s s s G试利用MA TLAB 求出其用分子和分母多项式表示的传递函数。
2.利用MATLAB 分析系统的稳定性在分析控制系统时,首先遇到的问题就是系统的稳定性。
判断一个线性系统稳定性的一种最有效的方法是直接求出系统所有的极点,然后根据极点的分布情况来确定系统的稳定性。
对线性系统来说,如果一个连续系统的所有极点都位于左半s 平面,则该系统是稳定的。
MATLAB 中根据特征多项式求特征根的函数为roots( ),其调用格式为r=roots(p) 其中,p 为特征多项式的系数向量;r 为特征多项式的根。
控制系统的稳定性分析实验报告一、实验目的1.了解控制系统的稳定性分析方法。
2.通过实验,掌握系统稳态误差、系统阻尼比、系统根轨迹等稳态分析方法。
3.掌握控制系统的稳定性分析实验步骤。
二、实验原理1.系统稳态误差分析系统稳态误差是指系统在达到稳态时,输出与输入之间的偏差。
对于稳态误差的分析,可以采用开环传递函数和闭环传递函数进行分析。
开环传递函数:G(s)闭环传递函数:G(s)/(1+G(s)H(s))其中,H(s)为系统的反馈环节,G(s)为系统的前向传递函数。
稳态误差可以分为静态误差和动态误差。
静态误差是指系统在达到稳态时,输出与输入之间的偏差;动态误差是指系统在达到稳态时,输出与输入之间的波动。
2.系统阻尼比分析系统阻尼比是指系统在达到稳态时,振荡的阻尼程度。
阻尼比越大,系统越稳定;阻尼比越小,系统越不稳定。
系统阻尼比的计算公式为:ζ=1/(2ξ)其中,ξ为系统的阻尼比,ζ为系统的阻尼比。
3.系统根轨迹分析系统根轨迹是指系统的极点随着控制参数变化而在复平面上的轨迹。
根轨迹分析可以用来判断系统的稳定性和性能。
系统的根轨迹可以通过以下步骤进行绘制:(1)确定系统的传递函数G(s)(2)将G(s)写成标准形式(3)计算系统的极点和零点(4)绘制系统的根轨迹三、实验步骤1.系统稳态误差分析实验(1)将系统的开环传递函数和闭环传递函数写出。
(2)通过实验,测量系统的静态误差和动态误差。
(3)根据静态误差和动态误差的测量结果,计算系统的稳态误差。
2.系统阻尼比分析实验(1)通过实验,测量系统的振荡频率和衰减周期。
(2)根据振荡频率和衰减周期的测量结果,计算系统的阻尼比。
3.系统根轨迹分析实验(1)将系统的传递函数写成标准形式。
(2)计算系统的极点和零点。
(3)绘制系统的根轨迹,并根据根轨迹的形状,判断系统的稳定性和性能。
四、实验结果分析通过实验,我们可以得到系统的稳态误差、阻尼比和根轨迹等数据。
根据这些数据,我们可以分析系统的稳定性和性能,并对系统进行优化。
第三章 线性系统的稳定性分析3。
1 概述如果在扰动作用下系统偏离了原来的平衡状态,当扰动消失后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的.否则,系统不稳定.一个实际的系统必须是稳定的,不稳定的系统是不可能付诸于工程实施的.因此,稳定性问题是系统控制理论研究的一个重要课题。
对于线性系统而言,其响应总可以分解为零状态响应和零输入响应,因而人们习惯分别讨论这两种响应的稳定性,从而外部稳定性和内部稳定性的概念。
应用于线性定常系统的稳定性分析方法很多.然而,对于非线性系统和线性时变系统,这些稳定性分析方法实现起来可能非常困难,甚至是不可能的。
李雅普诺夫(A 。
M. Lyapunov )稳定性分析是解决非线性系统稳定性问题的一般方法。
本章首先介绍外部稳定性和内部稳定性的概念及其相互关系,然后介绍李雅普诺夫稳定性的概念及其判别方法,最后介绍线性定常系统的李雅普诺夫稳定性分析。
虽然在非线性系统的稳定性问题中,Lyapunov 稳定性分析方法具有基础性的地位,但在具体确定许多非线性系统的稳定性时,却并不是直截了当的.技巧和经验在解决非线性问题时显得非常重要.在本章中,对于实际非线性系统的稳定性分析仅限于几种简单的情况。
3.2 外部稳定性与内部稳定性3。
2。
1 外部稳定:考虑一个线性因果系统,如果对一个有界输入u (t ),即满足条件:1()u t k ≤<∞的输入u (t),所产生的输出y (t)也是有界的,即使得下式成立:2()y t k ≤<∞则称此因果系统是外部稳定的,即BIBO (Bounded Input Bounded Output )稳定.注意:在讨论外部稳定性的时候,我们必须要假定系统的初始条件为零,只有在这种假定下面,系统的输入—输出描述才是唯一的和有意义的. 系统外部稳定的判定准则系统的BIBO 稳定性可根据脉冲响应矩阵或者传递函数矩阵来进行判别。
a)时变情况的判定准则对于零初始条件的线性时变系统,设(,)G t τ为脉冲响应矩阵,则系统BIBO 稳定的充要条件是,存在一个有限常数k ,使对于一切0[,),(,)t t G t τ∈∞的每一个元0(,)(1,2,.......;1,2,.....)(,)ij tij t g t i q j p g t d k τττ==≤<∞⎰有即,(,)G t τ是绝对可积的。
实验五自动控制系统的稳定性和稳态误差分析一、实验目的1、研究高阶系统的稳定性,验证稳定判据的正确性;2、了解系统增益变化对系统稳定性的影响;3、观察系统结构和稳态误差之间的关系。
二、实验任务1、稳定性分析欲判断系统的稳定性, 只要求出系统的闭环极点即可, 而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用 MATLAB 中的 tf2zp 函数求出系统的零极点,或者利用 root 函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
(1 已知单位负反馈控制系统的开环传递函数为 0.2(2.5 ( (0.5(0.7(3s G s s s s s +=+++, 用 MATLAB 编写程序来判断闭环系统的稳定性, 并绘制闭环系统的零极点图。
在 MATLAB 命令窗口写入程序代码如下:z=-2.5p=[0,-0.5,-0.7,-3]k=0.2Go=zpk(z,p,kGc=feedback(Go,1Gctf=tf(Gcdc=Gctf.dendens=poly2str(dc{1},'s'运行结果如下:dens=s^4 + 4.2 s^3 + 3.95 s^2 + 1.25 s + 0.5dens 是系统的特征多项式,接着输入如下 MATLAB 程序代码:den=[1,4.2,3.95,1.25,0.5]p=roots(den运行结果如下:p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ip 为特征多项式 dens 的根,即为系统的闭环极点,所有闭环极点都是负的实部, 因此闭环系统是稳定的。
下面绘制系统的零极点图, MATLAB 程序代码如下:z=-2.5p=[0,-0.5,-0.7,-3]k=0.2Go=zpk(z,p,kGc=feedback(Go,1Gctf=tf(Gc[z,p,k]=zpkdata(Gctf,'v'pzmap(Gctfgrid运行结果如下:z =-2.5000p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ik =0.2000输出零极点分布图如图 3-1所示。
3.6 线性系统的稳态误差一个稳定的系统在典型外作用下经过一段时间后就会进入稳态,控制系统的稳态精度是其重要的技术指标。
稳态误差必须在允许范围之内,控制系统才有使用价值。
例如,工业加热炉的炉温误差超过限度就会影响产品质量,轧钢机的辊距误差超过限度就轧不出合格的钢材,导弹的跟踪误差若超过允许的限度就不能用于实战,等等。
控制系统的稳态误差是系统控制精度的一种度量,是系统的稳态性能指标。
由于系统自身的结构参数、外作用的类型(控制量或扰动量)以及外作用的形式(阶跃、斜坡或加速度等)不同,控制系统的稳态输出不可能在任意情况下都与输入量(希望的输出)一致,因而会产生原理性稳态误差。
此外,系统中存在的不灵敏区、间隙、零漂等非线性因素也会造成附加的稳态误差。
控制系统设计的任务之一,就是尽量减小系统的稳态误差。
对稳定的系统研究稳态误差才有意义,所以计算稳态误差应以系统稳定为前提。
通常把在阶跃输入作用下没有原理性稳态误差的系统称为无差系统;而把有原理性稳态误差的系统称为有差系统。
本节主要讨论线性系统原理性稳态误差的计算方法,态误差系数法和动态误差系数法。
3.6.1 误差与稳态误差⑴按输入端定义的误差,即把偏差定义为误差,E(s) R(s) H (s)C(s)⑵按输出端定义的误差包括计算稳态误差的一般方法,静控制系统结构图一般可用图3-29a)的形式表示,经过等效变换可以化成图3-29(b)的形式。
系统的误差通常有两种定义方法:按输入端定义和按输出端定义。
3-25)⑶ 用终值定理求稳态误差e ss l s im 0 s e (s)R(s)en(s)N(s)例 3-14 控制系统结构图如图 3-30 所示。
已知 r(t) n(t) t ,求系统的稳态误差。
解 控制输入 r(t) 作用下的误差传递函数E (s) H R((s s )) C(s)H (s)3-26)按输入端定义的误差 E(s) (即偏差)通常是可测量的,有一定的物理意义,但其误差的理论含义不十分明显; 按输出端定义的误差 E (s) 是“希望输出” R (s)与实际输出 C(s) 之差, 比较接近误差的理论意义, 但它通常不可测量, 只有数学意义。
实验五 自动控制系统的稳定性和稳态误差分析一、实验目的1、研究高阶系统的稳定性,验证稳定判据的正确性;2、了解系统增益变化对系统稳定性的影响;3、观察系统结构和稳态误差之间的关系。
二、实验任务1、稳定性分析欲判断系统的稳定性,只要求出系统的闭环极点即可,而系统的闭环极点就是闭环传递函数的分母多项式的根,可以利用MATLAB 中的tf2zp 函数求出系统的零极点,或者利用root 函数求分母多项式的根来确定系统的闭环极点,从而判断系统的稳定性。
(1)已知单位负反馈控制系统的开环传递函数为0.2( 2.5)()(0.5)(0.7)(3)s G s s s s s +=+++,用MATLAB 编写程序来判断闭环系统的稳定性,并绘制闭环系统的零极点图。
在MATLAB 命令窗口写入程序代码如下: z=-2.5p=[0,-0.5,-0.7,-3] k=0.2 Go=zpk(z,p,k) Gc=feedback(Go,1) Gctf=tf(Gc) dc=Gctf.dendens=poly2str(dc{1},'s') 运行结果如下: dens=s^4 + 4.2 s^3 + 3.95 s^2 + 1.25 s + 0.5dens 是系统的特征多项式,接着输入如下MATLAB 程序代码:den=[1,4.2,3.95,1.25,0.5]p=roots(den)运行结果如下:p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ip为特征多项式dens的根,即为系统的闭环极点,所有闭环极点都是负的实部,因此闭环系统是稳定的。
下面绘制系统的零极点图,MATLAB程序代码如下:z=-2.5p=[0,-0.5,-0.7,-3]k=0.2Go=zpk(z,p,k)Gc=feedback(Go,1)Gctf=tf(Gc)[z,p,k]=zpkdata(Gctf,'v')pzmap(Gctf)grid运行结果如下:z =-2.5000p =-3.0058-1.0000-0.0971 + 0.3961i-0.0971 - 0.3961ik =0.2000输出零极点分布图如图3-1所示。
图3-1 零极点分布图(2)已知单位负反馈控制系统的开环传递函数为(2.5)()(0.5)(0.7)(3)k s G s s s s s +=+++,当取k =1,10,100用MATLAB 编写程序来判断闭环系统的稳定性。
只要将(1)代码中的k 值变为1,10,100,即可得到系统的闭环极点,从而判断系统的稳定性,并讨论系统增益k 变化对系统稳定性的影响。
当K=1时,MATLAB 程序如下: z=-2.5p=[0,-0.5,-0.7,-3] k=1Go=zpk(z,p,k) Gc=feedback(Go,1) Gctf=tf(Gc)[z,p,k]=zpkdata(Gctf,'v') pzmap(Gctf) grid z =-2.5000p =0 -0.5000 -0.7000 -3.0000 k =1Zero/pole/gain:(s+2.5)-----------------------s (s+0.5) (s+0.7) (s+3)Zero/pole/gain:(s+2.5)--------------------------------------------(s+3.03) (s+1.332) (s^2 - 0.1616s + 0.6195)Transfer function:s + 2.5---------------------------------------s^4 + 4.2 s^3 + 3.95 s^2 + 2.05 s + 2.5z =-2.5000 p =-3.0297 -1.3319 0.0808 + 0.7829i 0.0808 - 0.7829i k = 1 波形图如下:-0.8-0.6-0.4-0.20.20.40.60.8P ole-Zero MapReal AxisI m a g i n a r y A x i s图一:K=1时的零点极点分布图当K=1时,由于闭环极点不是全都具有负实部,所以该系统是不稳定的。
当K=10时,MATLAB程序如下:z=-2.5p=[0,-0.5,-0.7,-3]k=10Go=zpk(z,p,k)Gc=feedback(Go,1)Gctf=tf(Gc)[z,p,k]=zpkdata(Gctf,'v')pzmap(Gctf)gridz =-2.5000p =0 -0.5000 -0.7000 -3.0000k =10Zero/pole/gain:10 (s+2.5)-----------------------s (s+0.5) (s+0.7) (s+3)Zero/pole/gain:10 (s+2.5)-----------------------------------------(s+2.082) (s+3.335) (s^2 - 1.217s + 3.6)Transfer function:10 s + 25---------------------------------------s^4 + 4.2 s^3 + 3.95 s^2 + 11.05 s + 25z =-2.5000p =0.6086 + 1.7971i0.6086 - 1.7971i-3.3352-2.0821k =10 波形图如下:-2-1.5-1-0.50.511.52P ole-Zero MapReal AxisI m a g i n a r y A x i s图二:K=10时的零点极点分布图当K=10时, 由于闭环极点不是全都具有负实部,所以该系统是不稳定的。
当K=100时,MATLAB 程序如下:z=-2.5p=[0,-0.5,-0.7,-3] k=100 Go=zpk(z,p,k) Gc=feedback(Go,1) Gctf=tf(Gc)[z,p,k]=zpkdata(Gctf,'v') pzmap(Gctf) grid z = -2.5000p =0 -0.5000 -0.7000 -3.0000k =100Zero/pole/gain:100 (s+2.5)-----------------------s (s+0.5) (s+0.7) (s+3)Zero/pole/gain:100 (s+2.5)-------------------------------------------(s+5.358) (s+2.454) (s^2 - 3.612s + 19.01)Transfer function:100 s + 250----------------------------------------s^4 + 4.2 s^3 + 3.95 s^2 + 101.1 s + 250z =-2.5000 p =1.8058 + 3.9691i 1.8058 - 3.9691i -5.3575 -2.4541 k = 100 波形图如下:-4-3-2-101234P ole-Zero MapReal AxisI m a g i n a r y A x i s图三:K=100时的零点极点分布图当K=100时, 由于闭环极点不是全都具有负实部,所以该系统是不稳定的。
2、稳态误差分析(1)已知如图3-2所示的控制系统。
其中25()(10)s G s s s +=+,试计算当输入为单位阶跃信号、单位斜坡信号和单位加速度信号时的稳态误差。
图3-2 系统结构图从Simulink 图形库浏览器中拖曳Sum (求和模块)、Pole-Zero (零极点)模块、Scope (示波器)模块到仿真操作画面,连接成仿真框图如图3-3所示。
图中,Pole-Zero (零极点)模块建立()G s ,信号源选择Step (阶跃信号)、Ramp (斜坡信号)和基本模块构成的加速度信号。
为更好观察波形,将仿真器参数中的仿真时间和示波器的显示时间范围设置为300。
图3-3 系统稳态误差分析仿真框图信号源选定Step (阶跃信号),连好模型进行仿真,仿真结束后,双击示波器,输出图形如图3-4所示。
图3-4 单位阶跃输入时的系统误差信号源选定Ramp(斜坡信号),连好模型进行仿真,仿真结束后,双击示波器,输出图形如图3-5所示。
图3-5 斜坡输入时的系统误差信号源选定加速度信号,连好模型进行仿真,仿真结束后,双击示波器,输出图形如图3-6所示。
图3-6 加速度输入时的系统误差从图3-4、3-5、3-6可以看出不同输入作用下的系统的稳态误差,系统是II 型系统,因此在阶跃输入和斜坡输入下,系统稳态误差为零,在加速度信号输入下,存在稳态误差。
(2)若将系统变为I型系统,5()(10)G ss s=+,在阶跃输入、斜坡输入和加速度信号输入作用下,通过仿真来分析系统的稳态误差。
系统稳态误差分析仿真框图:图四:系统稳态误差分析仿真框图仿真波形图如下所示:图五:系统稳态误差仿真波形图三、实验要求1、完成实验任务中的所有内容;2、撰写实验报告。
实验报告内容包括:(1)实验题目和目的;(2)实验原理;(3)实验任务中要求完成实验的程序代码、仿真框图、波形和数据结果;(4)讨论下列问题:a)讨论系统增益k变化对系统稳定性的影响;增益K可在临界k的附近改变系统的稳定性。
b)讨论系统型数以及系统输入对系统稳态误差的影响。
增大系统的开环增益k,可以减少0型系统在阶跃输入时的位置误差,可以减少i型系统在斜坡输入时的速度误差,可以减小ii型系统在加速度输入时的加速度误差。
(5)实验体会。
通过本次实验,我明白了如何用零点极点增益的形式在MATLAB 上通过编程来判断一个高阶系统的稳定性,以及不同的增益对系统的影响。