同步电机坐标变换教程
- 格式:pdf
- 大小:476.20 KB
- 文档页数:17

一、概述如今,在工业界中,三相永磁同步电机因其结构简单、运行稳定、效率高等特点成为了一种常见的电机类型。
而电机的控制则是保证电机能够稳定高效运行的关键。
掌握三相永磁同步电机的控制原理对于工程师来说至关重要。
在三相永磁同步电机的控制中,坐标变换技术是一种常用的数学方法,通过坐标变换可以将三相电机的控制问题转换为直流电机控制问题,从而简化了控制器的设计。
二、三相永磁同步电机的数学模型1. 三相永磁同步电机是一种特殊的同步电机,它的定子绕组被连接到一个三相交流电源上。
它的转子上装有永磁体,因此在没有机械负载情况下依然能够产生恒定的磁场,这使得电机具有较高的效率和响应速度。
2. 为了完成对三相永磁同步电机的控制,我们需要建立其数学模型。
假设电机有a、b、c三个定子绕组,每个绕组的电流分别为ia、ib、ic,电机的磁链为Ψ,电机的控制变量为u,那么电机的数学模型可以表示为:其中,Ld和Lq分别表示d轴和q轴上的电感,ψp是永磁体的磁通,M是电机的磁链,J是电机的转动惯量,B是电机的阻尼系数,Te为电机的电磁转矩。
三、坐标变换推导1. 在三相永磁同步电机的控制中,我们通常使用dq坐标系来描述电机的运动状态。
在dq坐标系中,d轴与永磁体的磁通方向一致,q轴与d轴垂直。
通过dq坐标变换可以将三相电机的控制问题转换为直流电机的控制问题。
2. 我们可以通过以下的数学推导来实现坐标变换:在直角坐标系下,电机的三相电流可以表示为:假设θ为电机的旋转角度,那么dq坐标系转换可以表示为:在dq轴上,电机的电流可以表示为:通过以上推导,我们可以得到电机在dq坐标系下的控制方程,从而可以实现对电机的控制。
四、结论通过以上的推导,我们可以看到坐标变换技三相永磁同步电机坐标变换推导是电机控制中的关键步骤。
坐标变换可以让我们更方便地对电机进行控制,简化了控制器的设计流程,并且使得控制更加高效和稳定。
在坐标变换的基础上,我们可以进一步推导出电机的控制方程,从而实现对电机的精确控制。

永磁同步电机dq变换原理永磁同步电机是一种采用永磁体作为励磁源的同步电机。
它具有结构简单、体积小、高效率、高功率密度等优点,在工业应用中得到广泛应用。
而dq变换是一种常用的坐标变换方法,用于将永磁同步电机的三相电压和电流转换到以转子磁链轴和转子磁链垂直的两个坐标轴上,从而实现对永磁同步电机的控制。
永磁同步电机的dq坐标系是以转子磁链轴(d轴)和转子磁链垂直的坐标轴(q轴)为基础建立起来的。
其中,d轴与永磁体的磁场方向一致,而q轴与d轴垂直。
dq坐标系的建立使得永磁同步电机的数学模型更加简化,方便进行控制。
在dq坐标系下,永磁同步电机的电压和电流可以表示为d轴分量和q轴分量的和。
d轴分量代表永磁同步电机的直轴分量,也叫做磁轴分量,对应于永磁体的磁场方向;q轴分量代表永磁同步电机的交轴分量,也叫做励磁轴分量,对应于永磁体的磁场垂直方向。
dq变换的目的是将永磁同步电机的三相电压和电流转换到dq坐标系下。
通过dq变换,可以将三相电压和电流转换为d轴分量和q 轴分量的和。
具体的变换方式如下:1. d轴分量的计算:将三相电压和电流乘以对应的系数,分别相加得到d轴分量。
2. q轴分量的计算:将三相电压和电流乘以对应的系数,分别相加得到q轴分量。
通过dq变换,可以将永磁同步电机的电压和电流转换为d轴分量和q轴分量的和。
这样,我们就可以在dq坐标系下对永磁同步电机进行控制。
在控制永磁同步电机时,常用的控制方法是矢量控制。
矢量控制是一种在dq坐标系下进行控制的方法,它通过控制d轴分量和q轴分量的大小和相位,实现对永磁同步电机的控制。
总结一下,永磁同步电机dq变换原理是将永磁同步电机的三相电压和电流转换到以转子磁链轴和转子磁链垂直的两个坐标轴上。
通过dq变换,可以将永磁同步电机的电压和电流转换为d轴分量和q轴分量的和。
这样,我们就可以在dq坐标系下对永磁同步电机进行控制。
dq变换为永磁同步电机的控制提供了便利,使得永磁同步电机在工业应用中更加灵活和高效。

三相永磁同步电机静止坐标系三相永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种通过永磁体产生磁场,与电流产生的磁场相互作用来实现转动的电机。
与传统的感应电机相比,三相永磁同步电机具有高效率、高功率密度、高转矩密度等优点,在现代工业中得到广泛应用。
在三相永磁同步电机中,使用静止坐标系进行分析和控制,可以简化系统的数学模型,方便进行控制算法的设计和实现。
静止坐标系的选择通常有两种:d-q轴坐标系和α-β轴坐标系。
d-q轴坐标系是一种在直流电机控制中常用的坐标系,它是基于电动势方程和电流方程的等效性原理建立的。
在d-q坐标系中,电磁转矩与d轴电流成正比,而与q轴电流无关。
因此,通过控制d轴电流可以实现转矩的控制。
α-β轴坐标系是一种在交流电机控制中常用的坐标系,它是通过对三相电流进行变换得到的。
在α-β坐标系中,电磁转矩与α轴电流成正比,而与β轴电流无关。
通过控制α轴电流可以实现转矩的控制。
无论是d-q轴坐标系还是α-β轴坐标系,都可以通过正弦变换将三相电流转换到静止坐标系中。
正弦变换是一种将三相电流转换到两相电流的变换方法,通过正弦变换可以将三相电流分解为正弦分量和余弦分量。
在三相永磁同步电机的控制中,通常采用矢量控制的方法。
矢量控制是一种通过控制电流的大小和相位来实现对电机转矩和转速的控制的方法。
在静止坐标系中,可以通过控制d轴和q轴电流的大小和相位来实现矢量控制。
在控制算法的设计中,通常采用闭环控制的方法。
闭环控制是一种通过测量电机转速和转子位置来实时调整控制信号,从而实现对电机的精确控制的方法。
闭环控制可以提高系统的稳定性和鲁棒性,并且可以抵抗外部干扰和参数变化。
除了控制算法的设计,还需要对电机进行参数辨识和模型建立。
电机的参数辨识是指通过实验测量和数据处理来确定电机的各种参数,包括电阻、电感、电动势等。
模型建立是指根据电机的物理特性和数学模型来建立系统的数学模型,以便进行控制算法的设计和仿真。

FOCClarke变换和Park变换详解(动图+推导+仿真+附件代码)⽂章⽬录1 前⾔永磁同步电机是复杂的⾮线性系统,为了简化其数学模型,实现控制上的解耦,需要建⽴相应的坐标系变换,即Clark变换和Park变换。
2 ⾃然坐标系ABC三相永磁同步电机的驱动电路如下图所⽰;根据图⽰电路可以发现在三相永磁同步电机的驱动电路中,三相逆变输出的三相电压为UAU_{A}UA,UBU_{B}UB,UCU_{C}UC将作⽤于电机,那么在三相平⾯静⽌坐标系ABC中,电压⽅程满⾜以下公式:{UA=UmcosθeUB=Umcos(θe+2π3)UC=Umcos(θe−2π3)\begin{cases}U_{A} = U_{m}cos\theta_{e} \\ U_{B} = U_{m}cos(\theta_{e} + \cfrac{2\pi}{3}) \\ U_{C} =U_{m}cos(\theta_{e} - \cfrac{2\pi}{3}) \end{cases}⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧U A=Um c osθe U B=Um c os(θe+32π)UC=Um c os(θe−32π)θe\theta_{e}θe为电⾓度UmU_{m}Um为相电压基波峰值所以根据上述公式可以发现,三相电压的⼤⼩是随时间变化的正弦波形,相位依次相差120°,具体如下图所⽰;3 αβ\alpha\betaαβ坐标系由静⽌三相坐标系ABCABCABC变换到静⽌坐标系αβ\alpha\betaαβ的过程称之为Clarke变换;在αβ\alpha\betaαβ静⽌坐标系中,α\alphaα轴和β\betaβ轴的相位差为90°,且αβ\alpha\betaαβ的⼤⼩是随时间变化的正弦波形,具体如下图所⽰;从⾃然坐标系ABCABCABC 变换到静⽌坐标系αβ\alpha\betaαβ,满⾜以下条件:[fαfβf0]=T3s/2s∗[fAfBfC]\begin{bmatrix} f_{\alpha} \\ f_{\beta} \\ f_{0} \end{bmatrix} = T_{3s/2s}*\begin{bmatrix} f_{A} \\ f_{B} \\ f_{C} \end{bmatrix} ⎣⎡fαfβf0⎦⎤=T3s/2s∗⎣⎡f A f B f C⎦⎤其中T3S/2ST_{3S/2S}T3S/2S为变换矩阵:T3S/2S=N∗[1−12−12032−32222222]T_{3S/2S} = N*\begin{bmatrix} 1 &-\cfrac{1}{2} &-\cfrac{1}{2} \\ \\ 0 &\cfrac{\sqrt{3}}{2} &-\cfrac{\sqrt{3}}{2} \\ \\ \cfrac{\sqrt{2}}{2}&\cfrac{\sqrt{2}}{2} &\cfrac{\sqrt{2}}{2} \end{bmatrix} T3S/2S=N∗⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡1022−212322−21−2322⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤注意:NNN为系数,做等幅值变换和等功率变换NNN系数不同;等幅值变换 N=23N =\cfrac{2}{3}N=32等功率变换 N=23N =\sqrt\cfrac{2}{3}N=32下⾯均为等幅值变换3.1 Clarke变换三相电流ABCABCABC分别为iAi_{A}iA,iBi_{B}iB,iCi_{C}iC,根据基尔霍夫电流定律满⾜以下公式:iA+iB+iC=0i_{A}+i_{B}+i_{C} = 0iA+iB+iC=0静⽌坐标系αβ\alpha\betaαβ,α\alphaα轴的电流分量为iαi_{\alpha}iα,iβi_{\beta}iβ,则Clark变换满⾜以下公式:iα=iAiβ=13∗iA+23∗iBi_{\alpha} = i_{A} \\ \\ i_{\beta} = \cfrac{1}{\sqrt{3}}*i_{A}+\cfrac{2}{\sqrt{3}}*i_{B}iα=iA iβ=31∗iA+32∗iB在matlab的simulink仿真如下图所⽰;最终得到三相电流iAi_{A}iA,iBi_{B}iB,iCi_{C}iC的仿真结果如下;得到αβ\alpha\betaαβ坐标的 iαi_{\alpha}iα和 iβi_{\beta}iβ的仿真结果如下图所⽰;由上述两张图分析可以得到,等幅值Clark变换前后峰值不变,αβ\alpha\betaαβ坐标系中iαi_{\alpha}iα和iβi_{\beta}iβ相位相差90°。

派克变换,是将abc相变量系统各电磁量(电流、电压、磁链等),转换到以转子纵轴d、横轴q及静止轴0为坐标轴的dqo轴变量系统,使按相坐标建立的具有时变电感的变系数微分方程,变换为轴坐标表示的电感为常数的常系数微分方程。
由于定子与转子之间有相对运动及转子纵轴、横轴磁路不对称,绕组间的磁祸合将随转子转角不同而周期变化。
不仅互感是转子角度的函数,定子绕组自感也受转子位置的影响。
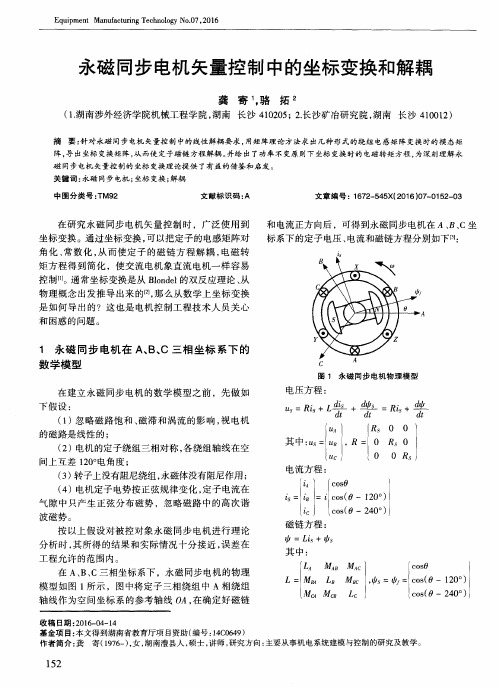
同步电机的坐标变换首先,我们以同步电机中各绕组的空间位置以及电流的方向来看电磁之间的关系:db图1 同步发电机的绕组空间位置由于各绕组是相互耦合的,与各绕组相交链的磁通将包括本绕组电流所产生的磁通和由其他绕组的电流产生而与本绕组交链的那部分磁通。
所以磁链方程为:⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛---⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛Q D f c b a QQ QDQfQcQbQaDQ DD Df Dc Db Da fQ fD ff fc fb fa cQ cD cf cc cb ca bQ bD bf bc bb ba aQ aD af ac ab aa Q D f c b a i i i i i i L M M M M M M L M M M M M M L M M M M M M L M M M M M M L M M M M M M L ψψψψψψ 下面我们分析一下各自的自感与互感的系数。
首先我们知道电机的旋转磁场与各定子绕组相交链的磁通的磁路发生周期性变换且周期为,由于电感与磁阻成反比,与绕组匝数的平方成正比。
所以定子绕组的自感也成周期性变化。
)120(2cos )120(2cos 2cos 202020︒++=︒-+=+=θθθl l L l l L l l L cc bb aa0l 为自感的平均值,2l 为自感的变化部分。
由于定子绕组间的空间位置相差120度,使得定子绕组间的互感恒为负值。
[][][])150(2cos )90(2cos )30(2cos 202020︒++-==︒-+-==︒++-==θθθm m M M m m M M m m M M ac ca cb bc ba ab 0m 为互感的平均值,2m 为互感变化部分。
第54卷第5期2021年5月Vol.54.No.5May12021微电机MICROMOTORS基于双旋转坐标的永磁同步电机无速度控换方法胡庆波S孙春媛2(1.宁波工程学院电信学院,浙江宁波315211;2.宁波业技术学院商贸学院,浙江宁波315100)摘要:针对永磁同步电机无速度反馈控制在全速范围内存在开环和闭环切换的问题,本文提出了切换时对电流和电压矢旋转坐标轴的控制方式%通过电压矢移,使控制内同时存在电流和电压双旋转坐标。
该方案电动为转速估计的,控制时轴电压矢量接近真%从估算的电机度真,最大限度降低电机过程中控制算法造成的不象%通过分析相结合的方了此方案的有效性,使电机在流频法控制到旋转坐标法的控制,具有较强的通和鲁棒性。
关键词:永磁同步电机;无速度传感器控制;假定旋转坐标法;流频法中图分类号:TM341;TM351;TP273文献标志码:A文章编号:1001-6848(2021$055099-5Sweecieng MeeiodtorSenhoreehConeroeotPermaneneMagneeSyncironouh Motor Basee on Double Rotating CoordinateeHU Qing-bo1,SUN Chun-yuan"(1.School ef Electronic and Infor*attn Enginering,Ningbo Unders+o qf Technology,NingOo Zhgiang315211,China; 2.Depagtent of Buing s and Trade,NmgOo Cdo CollegeqO Vocatiofal Technology,Ningbo Zhejiang315100,China)Abstract:In order to solve the switching problem used sensorless speed control of pe/nanenl magnet synchronous motor,a double rotating—0/01x1control scheme for current and voltage vectors was proposed. This method controls diOe/nl current and voltage vector angles in the double rotating coordinates.When the back-EMF was used as speed estimation,the scheme cvn ensure that the voltage vector was closed to the real closed-loop value.Then the estimated speed approximated the actual value,which cvn minimize the system instability cvused by the switching process between two control algorithms.The validity of this scheme was veVfied by theo/ticvl analysis and expeZmenl,and this scheme cvn make the speed control switching smoothly f/m I/F to the closed P oop control,and the proposed scheme has the advantages of the versatility and/bustness.Key wordt:pe/nanenl magnet synchronous motor;sensorless control;hypotheticvl reference frame;AF controlo引言永磁同步电机越来越多的在空气能热泵、家用电器、风机水泵等行业受到关注及%受工况及机的制约,上述领域无法安装度■的编码器。
一、什么时候需要设置同步?①更换直线电机②更换光栅尺③X2轴(上方,从动轴)、X1轴(下方,主动轴)在HMI界面显示坐标不一样④在机床运动过程中,断开机床使能,X1与X2的差值0.012mm二、X1轴同步的调整方法以ET3缸体OP10X1轴,X2轴同步调整为例将机床主轴移动到远离夹具的位置,防止同步时产生碰撞1、机床主空开上电,控制系统不上电,密码sunrise-机床数据-轴数据-选择X1轴。
2、将PM37140[X1]=1,PM37140[X2]=1。
3、将PM37100[X1]=0,PM37100[X2]=0。
4、NCK RESET。
5、我们要调整的是X1轴。
机床数据-驱动数据-X1轴,将PM1017=1。
6、将其他轴的X431接线柱拔下来,只保留X1轴的X431。
7、控制系统上电,设备会有震动和噪音(正在找U相的原点)。
8、找到U相原点后,PM1017自动变成0,NCK RESET后同步工作生效。
9、确认同步是否生效。
将X1轴的PM1736=1,按控制系统上电,PM1737显示数值在±1度之间,表明同步是成功的。
(如果超过±1度,就需要做同步程序,如果做了3次仍然失败,考虑是否是电机问题)。
10、将PM37140[X1]=0,PM37140[X2]=0。
11、将PM37100[X1]=1(MASTER),PM37100[X2]=11(SLAVE)。
12、NCK RESET。
13、插上其它轴的X431插子。
14、快速运动X轴的同时,将控制系统断电,看X1和X2在HMI上显示的坐标,如果坐标超过0.012mm,那么对X2轴做一次同步。
日期14.3.30批准审核编制王天刚COMAU设备直线电机同步调整方法第1页。