FIDIA五轴简易说明书
- 格式:doc
- 大小:2.16 MB
- 文档页数:13



JDPaint V5.5 多轴加工方法(版本0.01)北京精雕科技有限公司2007.08前言本文档从多轴基本知识、控制系统及控制软件(EN3D)设定及加工、JDPAINT5.5五轴编程模块等方面介绍一些常用的多轴加工技术,用以帮助使用者了解多轴加工操作和设定,减少多轴路径编程时间,改善多轴刀具路径质量。
本文档主要以实例的方式来介绍多轴编程加工,在阅读时可以结合实例来学习,可以达到更好的效果。
不同的人有不同的思路,因此请不要把本文档中介绍的一些技术视为多轴加工的基本原理,多轴加工技术内容相当丰富,不是薄薄一本手册可以覆盖的。
同时需要进行大量的实际加工,从中体会多轴加工的不同之处,灵活运用我们现有的编程功能,才能对五轴加工有一定的领悟。
阅读文档的读者应具备以下几方面的背景知识:1、对三轴精雕机有一定了解;2、具备一些模型的三轴加工经验;3、具备一些三维建模(或者曲面造型)经验者更佳。
第一章绪论在过去模具加工很少使用五轴加工,问题在于多轴机床的价格昂贵及人员培训与技术上的困难,大家皆敬而远之。
近年来因模具交期紧迫及价格压缩,五轴机床标准化产量,价格逐年下降,使五轴加工渐渐的受到模具业重视,多轴机床将是继高速加工机后另一个有效的加工工具。
1.1 五轴加工与三轴加工比较五轴加工与三轴加工比较,有以下几方面的优点:1) 减少工件非加工时间,可以提高加工效率五轴加工的一个主要优点是仅需经过一次装夹即可完成复杂形状零件的加工。
和多次装夹相比,它可极大地提高加工和生产能力,显著缩短产品加工周期及加工成本,并且提高了加工精度。
2) 刀具可以摆到更好的位置来加工曲面五轴加工完成一些三轴加工无法完成的加工,比如有负角的曲面零件加工,刀具可以摆到更好的位置来加工曲面,如图1-1所示。
图1-1 刀具可以摆到更好的位置来加工曲面图1-2 缩短加工时间, 改善表面加工质量3) 可以缩短曲面加工时间,改善曲面表面的加工质量五轴加工可通过将刀具倾斜一定角度,例如用铣刀侧刃进行铣削等,缩短加工时间;另外路径间距相同的情况下,用五轴加工工件表面的残留量要比三轴加工小得多,有利于改善加工曲面的表面光洁度,如图1-2所示。

百纳智能五轴说明书百纳智能五轴操作指南第一章:安全注意事项1.1 读取操作手册在使用百纳智能五轴之前,务必认真阅读本操作手册,并按照指南进行操作。
1.2 保持清洁保持百纳智能五轴的外观和工作区域的清洁,以确保操作的安全和平稳。
1.3 使用合适的工具和装备在进行百纳智能五轴的操作时,使用适当的工具和装备,确保人员和设备的安全。
1.4 遵循安全程序和规定在操作百纳智能五轴之前,了解并遵守所在地区的安全程序和规定。
1.5 维护设备定期检查和维护百纳智能五轴,确保其正常运行和安全性能。
第二章:产品概述2.1 产品介绍百纳智能五轴是一种具有自动化功能的工业机械设备,能够在三维坐标系中进行运动和定位。
2.2 技术参数- 最大运动速度:500mm/s- 最大加速度:10m/s²- X轴行程:1000mm- Y轴行程:800mm- Z轴行程:300mm- A轴旋转角度:±180°- B轴旋转角度:±360°第三章:安装和调试3.1 安全环境在安装百纳智能五轴之前,确保操作环境安全、稳定,并符合操作要求。
3.2 设备固定将百纳智能五轴固定在工作台或地面上,确保设备的稳定性和平衡性。
3.3 电源连接将百纳智能五轴与电源连接,并确保电源供应稳定。
3.4 传感器校准根据需要,对百纳智能五轴的传感器进行校准,以确保其测量精度和准确性。
3.5 运动系统调试根据百纳智能五轴的操作手册,进行运动系统的调试和校准,以确保其运动的平稳和准确性。
第四章:操作指南4.1 设备启动按照百纳智能五轴的操作手册,启动设备并进行系统自检和参数设置。
4.2 工件夹持将工件安全夹持在百纳智能五轴上,确保其牢固、稳定,并符合操作要求。
4.3 操作界面通过设备操纵杆或操纵盘,操作百纳智能五轴的运动和定位。
4.4 运动控制通过操作界面上的按钮、键盘或触摸屏,控制百纳智能五轴的运动,包括移动、转动等。
4.5 运动路径规划根据工件的要求和加工流程,规划并设置百纳智能五轴的运动路径,确保加工的准确性和效率。
F I D I A五轴简易说明书(总13页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC 的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidia 主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIA C20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mmA轴(主机床)95°~-110° (附机床)-95°~110° C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择Fidia Utility文件,然后点击User interface 进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在 CNC 命令界面被执行后, 在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A 菜单条B 显示和工作区域陈列, 取决于上下文, 位置值, 对话窗口, 图, 目录以及使用者输入值或其它数据的参数或命令窗口C 一个按时间顺序显示 CNC 信息的盒子D 垂向软件键条E 横向软件键条F 日期和时刻1、横向软件键条:REST·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SET COMMAND:设置命令屏幕显示:F进给 S转速 UNIT公/英制单位RCTP(五轴连动)OF/ONTOOL COORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SET COMMAND·SET ORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
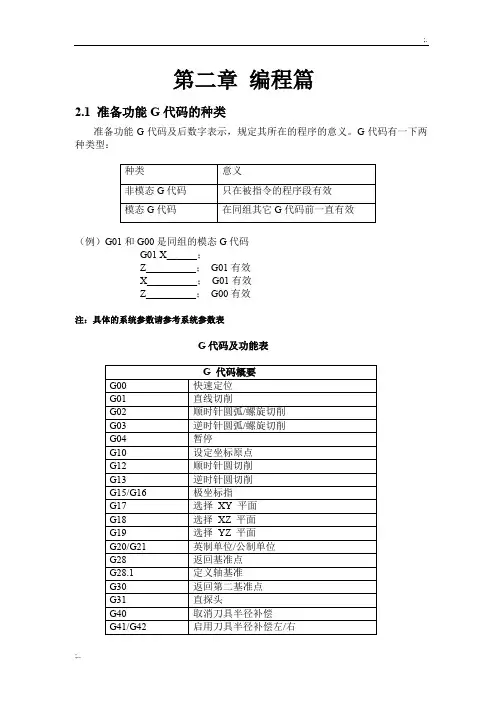
第二章编程篇2.1 准备功能G代码的种类准备功能G代码及后数字表示,规定其所在的程序的意义。
G代码有一下两种类型:(例)G01和G00是同组的模态G代码G01 X______;Z__________;G01有效X__________;G01有效Z__________;G00有效注:具体的系统参数请参考系统参数表G代码及功能表U、V、W分别和A、B、C 同义,同时使用A 和U 或B 和V 等会产生错误(也就是一行中用了两次A)。
在U、V、W 代码的描述中没有指定它们在同一程序行使用的次数,但A、B、C 代码的描述决定了他们只能使用一次。
2.1.1快速直线移动- G00(1)对于快速直线移动,程序G00 X__ Y__ Z__ A__ C__ 中的所有功能字,除了至少选用其中的一个外其它都为可选,如果当前移动模式为G00那么G00也是可选的,刀具可以以协调线性移动的方式以最大进给到达目的点,执行G00命令不会有切削动作发生。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
执行G16 时的当前点坐标就是极坐标原点。
如果在程序中省略了所有的轴功能字将会产生错误。
如果启用了刀具半径补偿,刀具的移动将与上面所描述的不同(见刀具补偿)。
如果程序在同一行有G53 命令,刀具的移动也同与上述不同(见绝对坐标系)。
2.1.2 以进给直线切削– G01(1)对于以进给直线切削来说,程序G01 X__ Y__ Z__ A__ C__中的所有功能字,除了必须至少使用的之外其它的轴功能字都为可选。
如果当前移动模式为G01,那么G01也是可选的,刀具将以协调线形移动的方式以当前进给移动到目的地。
(2)如果执行了G16命令设置了极坐标原点,在极坐标中使用半径和角度表示目的地,也可以使用G00 X__ Y__控制快速直线移动,X__是目的地相对于极坐标原点的半径,Y__则是目的地与极坐标原点连线与3点钟方向逆时针方向的夹角(也就是通常用的四象限标准)。
五轴智能焊锡机控制系统QZ-SMC1305(手持盒版)V6.6说明书苏州琼宇电子科技有限公司目录1.产品介绍 (2)1.1产品概述 (2)1.2功能简介 (3)1.3功能特性 (3)1.4产品列表 (4)2.接线说明图 (5)2.1 控制系统按线示意图 (5)2.2 安装尺寸.......................................................................................................... .. (6)3.按键说明 (7)3.1手持盒按键图 (7)3.2手持盒按键说明 (8)4.手持盒操作说明 (10)4.1开机画面介绍 (10)4.2主菜单功能介绍 (12)4.3新增功能操作 (16)4.4删除指令操作 (19)4.5复制指令操作 (19)4.6阵列复制操作 (19)4.7偏移操作 (20)4.8批量修改 (20)4.9类型批量修改 (20)4.10插入指令 (21)4.11系统 (21)4.12执行方式操作 (22)4.13复位方式操作 (23)4.14产量设定 (23)4.15默认参数 (24)4.16停机位置 (25)4.17焊接工艺 (25)4.18清洗功能 (25)4.19空移速度 (26)4.20对位操作 (26)4.21MARK点对位操作 (26)5.注意事项 (27)5.1装机事项 (27)5.2常见问题说明与故障排除 (37)1.产品介绍1.1产品概述QZ-SMC1305是由本公司专业数控团队为焊锡机行业量身定做的低成本、高浓缩、高集成度的智能焊锡机控制系统。
完善的焊锡工艺设置,满足不同的加工需求,广泛应用在多轴全自动焬锡机领域。
1.2功能简介1、显示屏采用320*240高分辨率彩屏、全中文操作界面,易学易用。
2、完善的焊锡工艺设置,具有点焊与拖焊等焊接;供锡速度可根据工作速度自动调整。
F I D I A五轴简易说明书 Revised by Petrel at 2021FIDIA五轴加工中心基础操作目录一、机床概述二、操作面板三、CNC的编程第一章机床概述名称:五轴高速数控铣床型号:Y2K411厂家:fidiaS.P.A主要技术参数:主轴转速:24000rpm主轴功率:27KWX2数控系统:FIDIAC20工件台面尺寸:5000×2200MM工作台最大载重:20000KG实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mmA轴(主机床)95°~-110°(附机床)-95°~110°C轴±180°第二章操作面板一、启动和关闭1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择FidiaUtility文件,然后点击Userinterface进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面在CNC命令界面被执行后,在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:A菜单条B显示和工作区域陈列,取决于上下文,位置值,对话窗口,图,目录以及使用者输入值或其它数据的参数或命令窗口C一个按时间顺序显示CNC信息的盒子D垂向软件键条E横向软件键条F日期和时刻1、横向软件键条:RES T·RESTCNC:机床恢复ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点SETCOMMAND:设置命令屏幕显示:F进给S转速UNIT公/英制单位RCTP(五轴连动)OF/ONTOOLCOORD刀具坐标轴OF/ONROTO当前原点坐标的旋转角度SETCOMMAND·SETORIGIN:设置加工原点坐标(1-10个)机床的原点为零号坐标系,是不能更改的。
五轴车床触摸屏说明书北京京联发数控科技有限公司2009年5月目录手动运行 (3)自动运行 (7)编辑程序 (8)参数设定 (11)注意事项 (12)触摸屏使用说明手动运行时黄灯亮,自动时绿灯亮,有报警时红灯亮。
手动运行:手动运行由以下几部分构成:锁定:禁止/允许对屏幕的触摸操作。
当程序自动运行时须按下此键!!!用于防止误碰触摸屏引起误动作。
运动状态显示部分:用于显示当前各轴位置,单位毫米,速度,各轴限位状态。
控制状态显示部分:用于显示当前运动对应的G指令。
变频器部分:控制主轴的运动。
点动增量:设定各轴的点动时运动步长。
速度控制:设定各轴的运动速度。
运动控制部分:用于控制各轴的运动,如点动、连续运动、回原点、设原点等。
1)显示部分:状态指示灯:绿色表示该轴没有碰到限位和行程开关。
(以X1轴为例)X1+/X1-正常时时绿色,当X轴碰到正/负限位时,X+/X-会变成红色运行OK灯:显示各轴伺服驱动器运行OK输入点的状态。
(红为故障,绿为正常)如果为红色,请先按运动控制区域中的“报警清除”按钮,此时运行OK灯变绿,然后再试。
(OK灯变红系统将认为没有准备好,且对其他运动操作不做响应)如仍变红,请先排除故障。
位置显示:显示当前各轴位置。
(单位毫米)速度显示:运动时,显示当前运动轴速度。
单位:米/分钟锁定:禁止/允许对屏幕的触摸操作。
点击【锁定】按钮:屏幕四周将变红,此时不接受任何除【锁定】按钮外的触摸和操作。
再次点击【锁定】按钮,则解除禁止操作状态。
2)点动增量,速度设定部分:点动距离设定:点击“DS”按钮或点击距离显示区域,都可弹出一个计算器,用于该值的设定,在计算器中按“=”按钮,将把数值填到显示区域内。
速度设定:点击“F”按钮或点击距离显示区域,都可弹出一个计算器,用于该值的设定,在计算器中按“=”按钮,将把数值填到显示区域内。
当输入的速度大于加工限速时,系统将默认填入加工限速。
3)运动控制:当某轴被按下时,以下操作都是对该轴的操作回参考点:点击“回参考点”使当前轴回到设定的参考点。
五轴智能焊锡平台控制系统示教盒版使用说明书目录1.产品介绍 (3)1.1产品概述 (3)1.2功能简介 (3)1.3产品列表 (3)1.4外观尺寸 (4)2.示教盒说明 (5)2.1示教盒按键图 (5)2.2示教盒按键介绍 (5)3.示教盒操作说明 (7)3.1开机画面介绍 (7)3.2主菜单功能介绍 (8)4.其他指令说明 (12)4.1删除指令操作 (12)4.2复制指令操作 (12)4.3阵列复制操作 (13)4.4偏移操作 (13)4.5单点调整 (14)4.6插入指令 (14)4.7复位指令 (14)5.注意事项 (15)5.1装机事项 (15)5.2常见问题说明与故障排除 (16)1.产品介绍1.1产品概述本产品是由本公司为焊锡机行业量身定做的高精准、易操作、高集成度的智能焊锡平台控制系统。
完善的焊接工艺设置,满足不同的加工需求,广泛应用在多轴全自动焬锡机领域。
1.2功能简介1、显示屏采用320*240高分辨率彩屏、全中文操作界面,易学易用。
2、完善的焊锡工艺设置,具有点焊与拖焊等焊接;供锡速度可根据工作速度自动调整。
3、点位参数可以用示教盒编程,具有简单易学、操作便捷等特点。
3、具有区域阵列复制,平移运算,批量编辑,单步、全自动及循环运行,I/O输入输出等功能。
4、具有自动执行功能、自动复位、产量计算、加工时间计时器等功能,满足不同应用需求。
5、动作参数编辑完毕,通过串口将动作参数下载到控制器中,即可脱机、独立运行;也可将动作参数保存到示教盒的SD卡中,方便调用;并能进行设备间的参数拷贝及保存。
6、示教盒配备2G的SD卡,可存储数千个加工文件,每个文件可支持8000条指令,使用时调出来即可。
7、硬件上具备4个枪通道控制、4路通用输出、8路输入、12路高速脉冲输出。
1.3产品列表1.4 外部尺寸2.示教盒说明2.1示教按键图2.2示教盒按键说明3.示教盒操作说明3.1 开机画面介绍上电后示教盒自动跳转自开机画面-当前工作画面,如下图所示:加工文件:指加工文件名;工作状态:指机器的当前工作状态;分为“停机、暂停、运行”三种状态;加工数量:指机器运行已完成的产量;工作速度:指设备运行过程的速度。
1 绪论1.1 工业机器人简介]1[早在20世纪初,随着机床、汽车等制造业的发展就出现了机械手。
1913年美国福特汽车工业公司安装了第一条汽车零件加工自动线,为了解决自动线、自动机的上下料与工件的传送,采用了专用机械手代替人工上下料及传送工件。
可见专用机械手就是作为自动机、自动线的附属装置出现的。
“工业机器人”这种自动化装置出现的比较晚。
但是自从世界上第一台工业机器人问世之后,不同功能的机器人也相继出现并且活跃在不同的领域,从天上到地下,从工业拓广到农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应用之广,影响之深,是我们始料未及的。
本课题所指的工业机器人,或称机器人操作臂、机器人臂、机械手等。
从外形来看,它和人的手臂相似,是由一系列刚性连杆通过一系列柔性关节交替连接而成的开式链。
这些连杆就像人的骨架,分别类似于胸,上臂和下臂,工业机器人的关节相当于人的肩关节、肘关节和腕关节。
操作臂的前端装有末端执行器或相应的工具,也常称为手或手爪。
手爪是由两个或多个手指所组成,手指可以“开”与“合”,实现抓去动作和细微操作。
手臂的动作幅度一般较大,通常实现宏观操作。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。
大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;圆柱坐标型工业机器人示意图控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
由于工业机器人具有一定的通用性和适应性,能适应多品种中、小批量的生产,70年代起,常与数字控制机床结合在一起,成为柔性制造单元或柔性制造系统的组成部分。
在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
FIDIA五轴加工中心基础操作
目录
一、机床概述
二、操作面板
三、CNC 的编程
第一章机床概述
名称:五轴高速数控铣床
型号:Y2K411
厂家:fidia S.P.A
主要技术参数:
主轴转速:24000rpm
主轴功率:27KWX2
数控系统:FIDIA C20
工件台面尺寸:5000×2200MM
工作台最大载重:20000KG
实际加工尺寸:X轴4200mm、Y轴110mm、Z轴1000mm
A轴(主机床)95°~-110° (附机床)-95°~110° C轴±180°
第二章操作面板
一、启动和关闭
1、启动:打开主机电源后进入windows见面,点击“开始”选择“程序”再选择Fidia Utility文件,然后点击User interface 进入用户界面。
2、关闭:从File菜单上选择关闭Exit,关闭CNC的命令页面(其它相关的系统界面先关闭,主界面才会关闭)。
最后关闭电脑再关闭总电源。
二、应用窗口界面
在 CNC 命令界面被执行后, 在显示器上显示出一个窗口,它占有了整个桌面,其组成如下:
A 菜单条
B 显示和工作区域陈列, 取决于上下文, 位置值, 对话窗口, 图, 目录以及使用者输入值或其它数据的
参数或命令窗口
C 一个按时间顺序显示 CNC 信息的盒子
D 垂向软件键条
E 横向软件键条
F 日期和时刻
1、横向软件键条:
RES T·RESTCNC:机床恢复
ZERO·RQ:各轴自动顺序回机床零点(Z、A、C、Y、X)·X、Y、Z、A、C:单独轴选择回零点
SET COMMAND:设置命令
屏幕显示:F进给 S转速 UNIT公/英制单位
RCTP(五轴连动)OF/ON
TOOL COORD刀具坐标轴OF/ON
ROTO当前原点坐标的旋转角度
SET COMMAND·SET ORIGIN:设置加工原点坐标(1-10个)
机床的原点为零号坐标系,是不能更
改的。
·SAVE ORIGIN:记录坐标数据
·RSET ORIGIN:恢复坐标数据
·CQAHADWH:手轮调节偏移量OF/ON
SAVERESTORE:SAVE记录·TOOL TABLE刀具表
RESTORE恢复·TOOL TABLE刀具表
2、竖向软件键条:
CNC环境·PARCNC(参数)·SWITCH使能/禁止阅读被编程的功能
·AXIS各轴开关
·FSC各轴镜像
·MDCNC选择零件程序的执行模式
·CQA各轴偏移量
·ROTANG·ROTANG以坐标系旋转
·ROTCEN以中心旋转
·PROGLIM程序限位
·AXISLIM轴限位
·SAFETYLIM安全限位
·TOOL TABLE:刀具表(0号为当前主轴无刀,1-41号
为可自动/手动换刀,42号为测头专
用刀位,43-100号为自定义刀号)
Type 1 –圆柱平刀具
Type 2 –圆柱圆角刀具
Type 3 –球状刀具
Type 4 –球状刀具,带一个圆周嵌入件
Type 5 –圆柱圆角刀具,带两个圆周嵌入件
Type 6 –圆柱圆角刀具,带两个方嵌入件
Type 7 –锥状刀具,带平刀尖
Type 8 –锥状刀具,带圆角刀尖
Type 9 –镗刀
Type 10 –带刀尖的刀具
类型 1 圆柱体刀具类型 2 复合型刀具
类型 3 球头刀具类型 4 带一个嵌入件的球头刀具
类型 5 带两个圆形嵌入件的复合型刀具类型 6 带方形嵌入件的复合型刀具
类型 7 带平端头的锥体刀具类型 8 带复合型端头的锥体刀具
类型 9 镗刀具类型 10 尖点刀具
**测刀前预设刀具表,测刀完毕自动写入实际数据。
CNC环境·EXECUTE执行窗口·EXECUTE FILE执行一个零件程序。
·EXECUTE BLOCK执行一个单个的编程
程序段。
·EXECUTE PROC执行一个过程。
·EXECUTE REPEAT重复执行那个最后被
执行的文件 ( 零件程序或过程 )
·ABORT EXECUTE中断一个零件程序,过
程或单个程序段的执行。
·EXECUTE RESUME该被中断的加工
循环被恢复。
·GRAPHIC TEST被赋作图形实验
的页面被显示。
LOG FILE:当此软件键被按压,该单元格被打开,显示按时间顺序排列的被控制系统记录的信息。
要滚动该信息列表,使用⇑⇓键或PAGE UP/DOWN 键即可。
每条信息的组成是:
一个顺序号;
它出现的时刻;
一个识别该信息的代码;
信息的文本。
例:
00012 00:00:33 WCN045 A + AXIS LIMIT MICROSWITCH
显示的信息随时检查数据的准确度。
要关闭该 LOG FILE 汇总盒形区,只要简单地再一次按压软件键 LOG FILE 即可。
从顺序号中缺席的信息是与机床或 CNC 运行无关的信息; 这些是包含着有关用户界面的资讯或错误信息。
第三章CNC 的编程
G代码
M代码。