第一章 控制系统导论
- 格式:doc
- 大小:617.41 KB
- 文档页数:6
自动控制原理简明教材胡寿松图书目录前言第一章控制系统导论1-1 自动控制的基本原理1-2 自动控制系统示例1-3 自动控制系统的分类1-4 自动控制系统的基本要求习题第二章控制系统的数学模型2-1 傅里叶变换与拉普拉斯变换2-2 控制系统的时域数学模型2-3 控制系统的复数域数学模型2-4 控制系统的结构图与信号流图2-5 数学模型的实验测定法习题第三章线性系统的时域分析法3-1 系统的时域性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 常规根轨迹的绘制法则4-3 广义根轨迹4-4 系统性能的分析习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统频率特性5-3 频域稳定判据5-4 频域稳定裕度5-5 闭环系统的频域性能指标习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 反馈校正习题第七章线性离散系统的分析7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 描述函数法习题。
现代控制系统(十一版)第一章控制系统导论1、实现高效的设计过程的主要途径是参数分析和优化。
参数分析的基础是:(1)辨识关键参数;(2)构建整个系统;(3)评估系统满足需求的程度。
这三步是一个循环迭代的过程。
一旦确定了关键参数,构建了整个系统,设计师就可以在此基础上优化参数。
设计师总是尽力辨识确认有限的关键参数,并加以调整。
2、控制系统设计流程(重要)①确定控制目标和受控变量,并初步定义(确定)系统性能指标设计要求和初步配置结构;②系统定义和建模;③控制系统设计,全系统集成的仿真和分析。
(控制精度要求决定了测量受控变量的传感器选型);④设计规范/设计要求规定了闭环系统应该达到的性能,通常包括:(1)抗干扰能力;(2)对指令的响应能力;(3)产生使用执行机构驱动信号的能力;(4)灵敏度;(5)鲁棒性等方面的要求。
⑤首要任务:设计出能够达到预期控制性能的系统机构配置(传感器、受控对象、执行机构和控制器)。
其中执行机构的选择与受控对象和变量有关,控制器通常包含一个求和放大器(框图中的比较器),用于将预期响应与实际响应进行比较,然后将偏差信号送入另一个放大器。
⑥调节系统参数,以便获得所期望的系统性能。
⑦设计完成之后,由于控制器通常以硬件的形态实现,还会出现各硬件之相互干扰的现象。
进行系统集成时,控制系统设计必须考虑的诸多问题,充满了各种挑战。
3、分析研究动态系统的步骤为:①定义系统及其元件;②确定必要的假设条件并推导出数学模型;③列写描述该模型的微分方程;④求解方程(组),得到所求输出变量的解;⑤检查假设条件和多得到的解;⑥有必要,重新分析和设计系统。
4、中英文术语和概念Automation 自动化Closed-loop feedback control system 闭环反馈控制系统Complexity of design 设计的复杂性Control system 控制系统Design 设计Design gap 设计差异Engineering design 工程设计Feedback signal 反馈信号Flyball governor 飞球调节器Hybrid fuel automobile 混合动力汽车Mechatronics 机电一体化系统Multivariable control system 多变量控制系统Negative feedback 负反馈Open-loop control system 开环控制系统Optimization 优化Plant 受控对象Positive feedback 正反馈Process 受控过程Productivity 生产率Risk 风险Robot 机器人Specification 设计规范Synthesis 综合System 系统Trade-off 折中处理第二章系统数学模关键词:数学模型微分方程(组)非线性模型区域(点)线性化拉普拉斯变换合理假设相似变量相似模型线性模型线性叠加原理注:线性系统满足叠加性和齐次行。
教学进程设计(含教学内容、教学设计、时间分配等)负反馈原理——构成闭环控制系统的核心把系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的。
负反馈控制系统的特点——按偏差控制的具有负反馈的闭环系统1)有反馈,信号流动构成闭回路。
2)按偏差进行控制。
对应的系统方框图为:由原理图画方块图的步骤:①看懂工作原理图,找出被控量、被控对象、给定量。
②从两头来,先画出给定量、被控对象和被控量。
③依原理图补上中间部分。
4.反馈控制系统的基本组成①测量元件:测量被控量②比较元件:产生偏差信号③放大元件:对偏差信号进行幅值、功率放大④执行机构:对被控对象施加作用⑤校正元件:改善系统性能⑥给定元件:给出输入信号5.自动控制系统的基本控制方式a.开环(信号单向流动)特点:简单、稳定、精度低。
b.闭环(信号有反向作用)特点:复杂、抗干扰能力强、精度高、有稳定性问题。
c.复合(前向联系、反向作用)特点:性能要求高时用之。
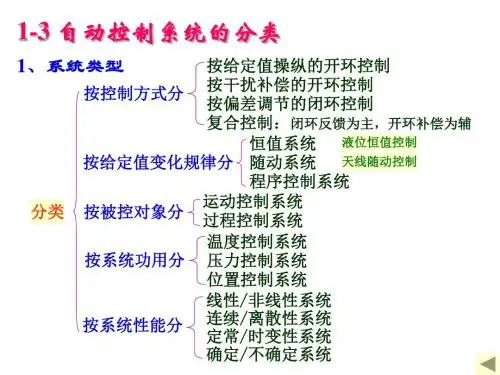
1-2 自动控制系统实例1.函数记录仪(P.7-8)2教学进程设计(含教学内容、教学设计、时间分配等)2.电阻炉微型计算机温度控制系统(P.8-9)3.锅炉液位控制系统(P.9-10)1-3自控系统的分类1.线性连续控制系统微分方程:)()()()()()()()(1111txtadttdxtadttxdtadttxdtacncnncnncn++++---=)()()()()()()()(1111txtbdttdxtbdttxdtbdttxdtbrmrnmrmmrm++++---式中)(txr——系统的输入量;)(txc——系统的输出量。
系数a0(t),a1(t)……a n(t),b0(t),b1(t)……b m(t)是常数时,称为定常系统,随时间变化时,称为时变系统。
定常系统分为:恒值系统、随动系统和程序控制系统1)恒值控制系统恒值系统的给定量是恒定不变的,如恒速、恒温、恒压等自动控制系统,这种系统的输出量也应是恒定不变的。

第一章控制系统导论1、自动控制系统的组成:控制器、被控对象、反馈环节、给定装置等。
2、自动控制系统基本控制方式:开环控制、闭环控制和复合控制三种方式。
3、反馈是将检测出来的输出量送回到系统的输入端,并与输入量进行比较的过程。
反馈有正反馈和负反馈1pj(j=1,2,…,n)分别称为传递函数的零点和极点,K1称为传递函数的增益(或根轨迹增益)。
4、传递函数的概念适用于线性定常系统,传递函数的结构和各项系数包括常数项完全取决于系统本身结构;它是系统的动态数学模型,与输入信号的具体形式和大小无关,不反映系统的内部信息。
5、传递函数是在零初始条件下定义的。
但是,对输入量加于系统之前, 系统处于稳定工作状态的情况同样适用。
6、传递函数不能(能或不能)反映系统或元件的学科属性和物理性质。
物理性质和学科类别截然不同的系统可能(可能或不可能)具有完全相同的传递函数。
1345、二阶系统的阶跃响应性能定性分析可知,ωn 一定,ζ与系统性能的关系:0< ζ <1欠阻尼,衰减振荡;ζ=1临界阻尼,单调上升;ζ >1过阻尼,单调上升;ζ =0无阻尼,等幅振荡。
6、二阶系统的阶跃响应性能定性分析可知,ωn 一定,ζ越大,平稳性越好,但是,上升速度越慢,快速性越差。
0.4<ζ<0.8,快速性和平稳性均较好。
7、二阶系统的阶跃响应性能定性分析可知,ζ一定时,ωn越大,上升速度和调节速度越快,且ωn 的变化不改变系统的平稳性。
7、二阶系统,阻尼比ζ越小,超调量越大,平稳性越差,调节时间ts长;ζ过大时,系统响应迟钝,调节时间ts也长,快速性差;ζ=0.7,调节时间最短,快速性最好,而超调量σ%<5%,平稳性也好,故称ζ891213.14那么其相应的瞬态分量持续时间较短。
对系统暂态性能的影响就小。
15、当某极点pj靠某零点zi很近,相应瞬态分量的系数就越小,极端情况下, 当pj和zi重合时,该零极点为偶极子,对系统的瞬态响应没有影响。
自动控制原理课程教案第一章自动控制系统导论本章教学目标:1使学生掌握自动控制系统的相关概念2使学生理解和掌握自动控制的基本原理3使学生了解自动控制系统的分类和基本要求本章基本要求:1正确理解和掌握负反馈控制的原理2了解控制系统的组成与分类3能确定被控系统的被控对象,被控量和给定量,掌握根据原理图绘制系统方框图的方法。
本章各节的教学内容:1自动控制系统的基本原理2自动控制系统分类3对控制系统的基本要求4自动控制的发展简史5控制系统设计概论本章教学重点:1要求学生了解自动控制系统基本概念、基本变量、基本组成及工作原理2理解信息反馈的含义和作用,区别开环控制和闭环控制3绘制控制系统方框图本章教学内容的深化和拓宽:使学生了解更多工程实际中所用的控制系统,并深入了解它们的工作原理。
本章教学方式:采用工程实例和设疑方法引导学生用系统论,信息论观点分析广义系统的动态特征、信息流,理解信息反馈的作用。
绘制控制系统方框图。
在讲述控制理论发展史引入我国古代指南车和“二弹一星”特殊贡献科学家——钱学森在自动控制理论方面的成就,进行爱国主义和专业教育。
在讲述控制系统系统设计概论,引用转台转速控制和磁盘驱动读取系统的设计实例,强化设计训练。
本章教学过程中应注意的问题:本章概念较多,多举事例说明,以吸引学生的兴趣。
本章主要参考书目:《自动控制原理》吴秀华主编,中国水利水电出版社,2006年《自动控制原理》修订版,孙亮,北京工业大学出版社,2006 年《自动控制原理》胡寿松,北京航空航天大学,2006 年。
《自动控制原理》黄家英主编,东南大学出版社,1991年《自动控制原理》李友善主编,国防工业出版社,1989年《控制理论基础》王显正、陈正航主编,科学出版社,2000年第二章控制系统的数学模型本章教学目标:通过本章学习,使学生掌握不同域对应的不同种类的数学模型,学会系统微分方程和传递函数的求法,能绘制系统结构图和信号流图,会用结构图等效变换和梅森公式求系统的传递函数。
第1章控制系统导论基础练习题下面的系统都可以用框图来表示它们的因果关系和反馈回路(有反馈时)。
试辨识每个方框的功能,指出其中的输入变量、输出变量和待测变量。
必要时请参考图1.3。
E1.1描述能测量下列物理量的典型传感器:(a)线性位置(b)速度(或转速)(c)非重力加速度(d)旋转位置(或角度)(e)旋转速度(f)温度(g)压力(h)液体(或气体)流速(i)扭矩(j)力【解析】(a)位置传感器:用来测量机器人自身位置的传感器。
(b)转速传感器:是将旋转物体的转速转换为电量输出的传感器。
(c)重力加速度传感器:能够感知到加速力的变化的传感器。
(d)角度传感器:用来检测角度的传感器。
(e)转速传感器:是将旋转物体的转速转换为电量输出的传感器。
(f)温度传感器:指能感受温度并转换成可用输出信号的传感器。
(g)压力传感器:是能感受压力信号,并能按照一定的规律将压力信号转换成可用的输出的电信号的传感器。
(h)流量传感器:测定吸入发动机的空气流量的传感器。
液体流量计传感器:用来测量各种导电液体介质的体积流量的传感器。
(i)扭矩传感器:将扭力的物理变化转换成精确的电信号的传感器。
(j)测力传感器:在受到外力作用后,粘贴在弹性体的应变片随之产生形变引起电阻变化,电阻变化使组成的惠斯登电桥失去平衡输出一个与外力成线性正比变化的电量电信号的传感器。
E1.2描述能实现下列转化的典型执行机构:(a)流体能到机械能(b)电能到机械能(c)机械形变到电能(d)化学能到运动能【解析】(a)液压马达、液压缸(b)电动机(c)形变发电装置(d)内燃机E1.3精密的光信号源可以将功率的输出精度控制在1%之内。
激光器由输入电流控制,产生所需要的输出功率。
作用在激光器上的输入电流由一个微处理器控制,微处理器将预期的功率值,与由传感器测量得到的,并与激光器的实际输出功率成比例的信号进行比较。
试辨识指明输出变量、输入变量、待测变量和控制装置,从而完成这个闭环控制系统的如图E1.3所示的框图。
第一章控制系统导论
一、填空
1、对于一个自动控制的性能要求可以概括为三个方面:、、。
2、“经典控制理论”的内容是以为基础的。
3、根据采用的信号处理技术的不同,控制系统分为模拟控制系统和。
4、反馈控制又称偏差控制,其控制作用是通过与反馈量的差值进行的。
5、复合控制有两种基本形式:即按的前馈复合控制和按的前馈复合控制。
6、在水箱水温控制系统中,受控对象为,被控量为。
7、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为;含有测速发电机的电动机速度控制系统,属于。
8、火炮跟踪系统是一种控制系统,一般对系统的指标要求较高。
9、按控制方式分类,制动控制系统分为、和。
10、就历史发展而言,自动控制理论可分为以为基础的经典控制理论和以为基础的现代控制理论。
二、选择题
1、通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为(C )
A.比较元件
B.给定元件
C.反馈元件
D.放大元件
2、当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电
动机可看作一个(B )
A.比例环节
B.微分环节
C.积分环节
D.惯性环节
3、与开环控制系统相比较,闭环控制系统通常对(B )进行直接或间接地测量,通过反馈环节去影响控制信号。
A.输出量
B.输入量
C.扰动量
D.设定量
4、主要用于产生输入信号的元件称为(B )
A.比较元件
B.给定元件
C.反馈元件
D.放大元件
5、如果被调量随着给定量的变化而变化,这种控制系统叫(B )
A.恒值调节系统
B.随动系统
C.连续控制系统
D.数字控制系统
6、与开环控制系统相比较,闭环控制系统通常对(B )进行直接或间接地测量,通过反
馈环节去影响控制信号。
A.输出量
B.输入量
C.扰动量
D.设定量
7、直接对控制对象进行操作的元件称为(D )
A.给定元件
B.放大元件
C.比较元件
D.执行元件
8、开环控制系统的的特征是没有(C )
A.执行环节
B.给定环节
C.反馈环节
D.放大环节
9、主要用来产生偏差的元件称为(A )
A.比较元件
B.给定元件
C.反馈元件
D.放大元件
10、随动系统对(A )要求较高。
A.快速性
B.稳定性
C.准确性
D.振荡次数
11、“现代控制理论”的主要内容是以(B )为基础,研究多输入、多输出等控制系统的
分析和设计问题。
A.传递函数模型
B.状态空间模型
C.复变函数模型
D.线性空间模型
12、主要用于稳定控制系统,提高性能的元件称为(D )
A.比较元件
B.给定元件
C.反馈元件
D.校正元件
13、系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为(D )
A.系统辨识
B.系统分析
C.最优设计
D.最优控制
14、系统的数学模型是指(C )的数学表达式。
A.输入信号
B.输出信号
C.系统的动态特性
D.系统的特征方程
15、对于代表两个或两个以上输入信号进行(C )的元件又称比较器。
A.微分
B.相乘
C.加减
D.相除
16、采用负反馈形式连接后,则(D )
A、一定能使闭环系统稳定;
B、系统动态性能一定会提高;
C、一定能使干扰引起的误差逐渐减小,最后完全消除;
D、需要调整系统的结构参数,才能改善系统性能。
三、计算题
1、 电冰箱制冷原理图如图1所示,简述系统工作原理,指出被控对象,被控量和给定量,并画出系统方框图。
2、图2为液位控制系统的示意图,试说明其工作原理并绘制系统的方框图。
3、图3所示为一液面控制系统。
图中K 为放大器的放大倍数,SM 为执行电动机。
试分析该系统的工作原理,在系统中找出参考输入、干扰量、控制器及被控对象,并画出系统的方块图。
图3液面控制系统原理图
4、图4所示为一液面控制系统,试说明它的工作原理。
图
1电冰箱制冷系统原理图
图2液位控制系统示意图
图4 液面控制系统原理图
答案
一、填空题
1、快速性、准确性、稳定性
2、传递函数
3、数字控制系统
4、给定值
5、输入;扰动;
6、水箱;水温
7、开环控制系统;闭环控制系统;闭环控制系统
8、随动、快速性
9、开环控制、反馈控制、复合控制
10、传递函数、状态空间
二、选择题
1、C
2、B
3、B
4、B
5、B
6、B
7、D
8、C
9、A 10、A 11、B 12、D 13、D 14、C 15、C 16、D
三、计算题
1、解:被控对象是看得见的实体,
不能与物理量相混淆。
被控制量则是
被控对象中表征被控制对象工作状态
的物理量。
确定控制对象要看控制的
目的与任务。
控制的任务是保持冰箱内的温度
Tc等于设定的温度Tr。
冰箱的箱体是
被控对象,箱内温度是被控量。
由控制
器旋钮设定出电位器输出电压(与希望
图1电冰箱制冷系统原理图
温度Tr值对应)是给定量。
温度控制器中的双金属温度传感器(测量元件)感受冰箱内的温度,并把它转换为电压信号,与控制器旋钮设定出电位器(给定元件)输出电压(对应于与希望温度Tr)相比
较,利用偏差电压u ∆(表征实际温度和希望温度的偏差)控制继电器。
当u ∆大到一定的值时,继电器接通压缩机起动将蒸发器中的高温低压气态制冷液送到冷却器散热。
降温后流出的低温低压冷却液被压缩成低温高压液态进入蒸发器急速降压扩散成气体,吸收箱体内的热量,使箱体内温度降低,而高温低压制冷剂又被吸入冷却器。
如此循环,使冰箱达到制冷效果。
继电器,压缩机,蒸发器和冷却器组成系统的执行机构,完成降温功能。
冰箱制冷系统方框图如图1-1所示。
2、说明 液位控制系统是一典型的过程
控制系统。
控制的任务是:在各种扰动的
作用下尽可能保持液面高度在期望的位置
上。
故它属于恒值调节系统。
现以水位控
制系统为例分析如下。
解 分析图1-3可以看到:被控量为水位
高度h (而不是水流量Q 2或进水流量Q 1);
受控对象为水箱;使水位发生变化的主要
原因是用水流量Q 2,故它为系统的负载扰
动;而进水流量Q 1是用以补偿用水流量的
改变,使水箱的水位保持在期望的位置上的
控制作用;控制进水流量的使由电动机驱动的阀门V 1,故电动机-减速器-阀门V 1一起构成系统的执行机构;而电动机的供电电压u d 取决于电位器动触点与接零点之间的电位差,若记接零点与电位参考点之间的电压为u g ,则它便是系统的给定信号,记动触点与电位参考点之间的电压为u f ,而u d =u g -u f ,故u f 为负反馈信号。
于是可绘制系统方框图,如图2-1所示。
系统的调节过程如下:调整系统和进水阀V 1的开度使系统处于平衡状态,这时进水流量Q 1和额定的用水流量Q 2保持动态平衡,液面的高度恰好在期望的位置上,而与浮子杠杆相联接的电位器动触头正好在电位器中点(即接零点)上,从而u d =0电动机停止不动;当用水流量发生变化时,比如用水流量增大使得液面下降,于是浮子也跟着下降,通过杠杆作用带动电位器的动触点往上移,从而给电动机电枢提供一定的电压,设其极性为正的(即u d >0),于是电动机正转,通过减速器驱动阀门V 1增大其开度。
3、解:液面为设定高度时,浮子的位置使电位器活动端的电位为零,电机电压为零,电机不转阀门开度保持不变,液面高度保持不变。
当液面高度高于设定值时,浮子上升使电位器图1-1 冰箱制冷系统方框图 图2液位控制系统示意图 图2-1 液位控制系统方块图 Q
Q
活动端电位为正,电机电压为正,电机正传使阀门开度减小,使流入量M2减少,液面下降,趋于设定值。
反之,电机反转,阀门开度增大,流入量增加,液面也趋于设定值。
参考输入是电位器中点电压,是零。
干扰量包括出水量,进水管水压的波动等。
被控量是液面高度。
控制器包括放大器,浮子,电位器。
被控对象包括水箱中的水,控制阀,减速器,电机。
系统方框图如下。
图3 系统方框图
4、解:当液位为设定值时,浮子通过杠杆使阀门开度为某一值,流入量等于流出量,液位不变。
若液位下降,则浮子下降并使阀门开度增加,流入量增加。
若液位上升,则浮子是阀门开度减小,流入量减小。
可见,此系统力图使液位保持在设定高度。