自动控制原理第一章 控制系统导论
- 格式:ppt
- 大小:3.02 MB
- 文档页数:69
自动控制原理简明教材胡寿松图书目录前言第一章控制系统导论1-1 自动控制的基本原理1-2 自动控制系统示例1-3 自动控制系统的分类1-4 自动控制系统的基本要求习题第二章控制系统的数学模型2-1 傅里叶变换与拉普拉斯变换2-2 控制系统的时域数学模型2-3 控制系统的复数域数学模型2-4 控制系统的结构图与信号流图2-5 数学模型的实验测定法习题第三章线性系统的时域分析法3-1 系统的时域性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 常规根轨迹的绘制法则4-3 广义根轨迹4-4 系统性能的分析习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统频率特性5-3 频域稳定判据5-4 频域稳定裕度5-5 闭环系统的频域性能指标习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 反馈校正习题第七章线性离散系统的分析7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 描述函数法习题。
教学进程设计(含教学内容、教学设计、时间分配等)负反馈原理——构成闭环控制系统的核心把系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的。
负反馈控制系统的特点——按偏差控制的具有负反馈的闭环系统1)有反馈,信号流动构成闭回路。
2)按偏差进行控制。
对应的系统方框图为:由原理图画方块图的步骤:①看懂工作原理图,找出被控量、被控对象、给定量。
②从两头来,先画出给定量、被控对象和被控量。
③依原理图补上中间部分。
4.反馈控制系统的基本组成①测量元件:测量被控量②比较元件:产生偏差信号③放大元件:对偏差信号进行幅值、功率放大④执行机构:对被控对象施加作用⑤校正元件:改善系统性能⑥给定元件:给出输入信号5.自动控制系统的基本控制方式a.开环(信号单向流动)特点:简单、稳定、精度低。
b.闭环(信号有反向作用)特点:复杂、抗干扰能力强、精度高、有稳定性问题。
c.复合(前向联系、反向作用)特点:性能要求高时用之。
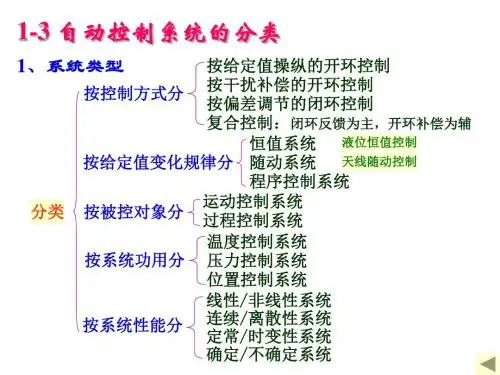
1-2 自动控制系统实例1.函数记录仪(P.7-8)2教学进程设计(含教学内容、教学设计、时间分配等)2.电阻炉微型计算机温度控制系统(P.8-9)3.锅炉液位控制系统(P.9-10)1-3自控系统的分类1.线性连续控制系统微分方程:)()()()()()()()(1111txtadttdxtadttxdtadttxdtacncnncnncn++++---=)()()()()()()()(1111txtbdttdxtbdttxdtbdttxdtbrmrnmrmmrm++++---式中)(txr——系统的输入量;)(txc——系统的输出量。
系数a0(t),a1(t)……a n(t),b0(t),b1(t)……b m(t)是常数时,称为定常系统,随时间变化时,称为时变系统。
定常系统分为:恒值系统、随动系统和程序控制系统1)恒值控制系统恒值系统的给定量是恒定不变的,如恒速、恒温、恒压等自动控制系统,这种系统的输出量也应是恒定不变的。

![自动控制原理[01][控制系统导论]](https://uimg.taocdn.com/57faa1cdad51f01dc281f1b4.webp)
第一章控制系统导论1、自动控制系统的组成:控制器、被控对象、反馈环节、给定装置等。
2、自动控制系统基本控制方式:开环控制、闭环控制和复合控制三种方式。
3、反馈是将检测出来的输出量送回到系统的输入端,并与输入量进行比较的过程。
反馈有正反馈和负反馈1pj(j=1,2,…,n)分别称为传递函数的零点和极点,K1称为传递函数的增益(或根轨迹增益)。
4、传递函数的概念适用于线性定常系统,传递函数的结构和各项系数包括常数项完全取决于系统本身结构;它是系统的动态数学模型,与输入信号的具体形式和大小无关,不反映系统的内部信息。
5、传递函数是在零初始条件下定义的。
但是,对输入量加于系统之前, 系统处于稳定工作状态的情况同样适用。
6、传递函数不能(能或不能)反映系统或元件的学科属性和物理性质。
物理性质和学科类别截然不同的系统可能(可能或不可能)具有完全相同的传递函数。
1345、二阶系统的阶跃响应性能定性分析可知,ωn 一定,ζ与系统性能的关系:0< ζ <1欠阻尼,衰减振荡;ζ=1临界阻尼,单调上升;ζ >1过阻尼,单调上升;ζ =0无阻尼,等幅振荡。
6、二阶系统的阶跃响应性能定性分析可知,ωn 一定,ζ越大,平稳性越好,但是,上升速度越慢,快速性越差。
0.4<ζ<0.8,快速性和平稳性均较好。
7、二阶系统的阶跃响应性能定性分析可知,ζ一定时,ωn越大,上升速度和调节速度越快,且ωn 的变化不改变系统的平稳性。
7、二阶系统,阻尼比ζ越小,超调量越大,平稳性越差,调节时间ts长;ζ过大时,系统响应迟钝,调节时间ts也长,快速性差;ζ=0.7,调节时间最短,快速性最好,而超调量σ%<5%,平稳性也好,故称ζ891213.14那么其相应的瞬态分量持续时间较短。
对系统暂态性能的影响就小。
15、当某极点pj靠某零点zi很近,相应瞬态分量的系数就越小,极端情况下, 当pj和zi重合时,该零极点为偶极子,对系统的瞬态响应没有影响。
自动控制原理课程教案第一章自动控制系统导论本章教学目标:1使学生掌握自动控制系统的相关概念2使学生理解和掌握自动控制的基本原理3使学生了解自动控制系统的分类和基本要求本章基本要求:1正确理解和掌握负反馈控制的原理2了解控制系统的组成与分类3能确定被控系统的被控对象,被控量和给定量,掌握根据原理图绘制系统方框图的方法。
本章各节的教学内容:1自动控制系统的基本原理2自动控制系统分类3对控制系统的基本要求4自动控制的发展简史5控制系统设计概论本章教学重点:1要求学生了解自动控制系统基本概念、基本变量、基本组成及工作原理2理解信息反馈的含义和作用,区别开环控制和闭环控制3绘制控制系统方框图本章教学内容的深化和拓宽:使学生了解更多工程实际中所用的控制系统,并深入了解它们的工作原理。
本章教学方式:采用工程实例和设疑方法引导学生用系统论,信息论观点分析广义系统的动态特征、信息流,理解信息反馈的作用。
绘制控制系统方框图。
在讲述控制理论发展史引入我国古代指南车和“二弹一星”特殊贡献科学家——钱学森在自动控制理论方面的成就,进行爱国主义和专业教育。
在讲述控制系统系统设计概论,引用转台转速控制和磁盘驱动读取系统的设计实例,强化设计训练。
本章教学过程中应注意的问题:本章概念较多,多举事例说明,以吸引学生的兴趣。
本章主要参考书目:《自动控制原理》吴秀华主编,中国水利水电出版社,2006年《自动控制原理》修订版,孙亮,北京工业大学出版社,2006 年《自动控制原理》胡寿松,北京航空航天大学,2006 年。
《自动控制原理》黄家英主编,东南大学出版社,1991年《自动控制原理》李友善主编,国防工业出版社,1989年《控制理论基础》王显正、陈正航主编,科学出版社,2000年第二章控制系统的数学模型本章教学目标:通过本章学习,使学生掌握不同域对应的不同种类的数学模型,学会系统微分方程和传递函数的求法,能绘制系统结构图和信号流图,会用结构图等效变换和梅森公式求系统的传递函数。