850mm六辊可逆冷轧机开卷机直流调速系统课程设计
- 格式:docx
- 大小:656.36 KB
- 文档页数:34
六辊可逆冷轧机组自控系统的应用摘要:本文介绍了六辊可逆冷轧机组自控系统的应用。
该系统采用先进的自动控制技术,实现了准确控制轧制过程的压力、速度、负荷等多个参数,大大提高了轧制效率和产品质量。
同时,该系统还具有实时监测和故障自诊断功能,可以在第一时间发现和解决设备故障,确保生产稳定和安全。
该系统已经在多个冷轧厂得到广泛应用,并取得了显著的成果。
关键词:六辊可逆冷轧机组;自控系统;自动控制技术;实时监测;故障自诊断。
正文:随着工业化进程的加速和市场需求的不断增长,冷轧产品在现代工业制造中的地位越来越重要,产品的质量和生产效率直接决定了企业的竞争力。
针对冷轧生产中的一系列技术问题,不断出现了一些新的技术手段和设备装备。
其中,六辊可逆冷轧机组是一种非常先进和高效的轧制设备,广泛应用于钢铁、有色金属和高强度板材等领域。
然而,机组自控系统的应用和优化仍然是提高产能和质量的重要途径。
六辊可逆冷轧机组自控系统是将自动控制技术应用于轧制设备中,通过电子计算机、传感器等装置来实现对轧制过程中的多个参数进行准确调整和控制。
主要包括轧辊压力、轧辊速度、轧辊间距、辊缝形状、冷却水量等方面,以达到优化轧制过程,提高轧制效率和产品质量的目的。
与传统的人工控制方式相比,自控系统具有调节精度高、控制速度快和稳定性好等优势,增强了机组的自适应能力和生产灵活性。
该系统还具有实时监测和故障自诊断功能,能够对轧制机组进行安全监测和故障诊断。
例如,当轧制负荷过大、轧辊压力不均衡或者辊缝偏移等故障出现时,系统能够自动诊断并发出警报信号,提示工作人员进行相应的处理和维修,避免对设备和产品造成不利影响。
同时,该系统还能够自动生成数据报表,对轧制过程进行全程记录和分析,为客户提供可靠的数据支持和技术服务。
该自控系统已经在多个冷轧厂得到广泛应用,并取得了显著的成果。
通过系统控制,轧制产品的薄厚度、表面光洁度和机械性能等方面均得到了显著提高,生产效率也得到了大幅度的提升。
运动控制系统课程设计学院:信息科学与工程学院专业班级: XXX学号 :姓名: SHEN指导老师:前言本次课程设计主要为大四第一学期所学的运控课程而安排的,主要目的在于加深对理论知识的理解,并针对具体的控制对象——四辊可逆冷轧机来设计一个具体的控制系统,将理论运用于实践,在实践中加深理论的理解。
同时此次课程设计可以为大四第二学期的毕业设计打下坚实的基础。
因此,认真做好此次课程设计意义重大。
直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
近年来,在电力电子变换器中以晶闸管为主的可控器件已经基本被功率开关器件所取代,因而变换技术也由相位控制转变成脉宽调制(PWM);交流可调拖动系统正逐步取代直流拖动系统。
然而,直流拖动控制毕竟在理论上和实践上都比较成熟,而且我国早期的许多工业生产机械都是采用直流拖动控制系统,所以它在工业生产中还占有相当大的比重,短时间内不可能完全被交流拖动系统所取代。
在可逆调速系统中,电动机最基本的要素就是能改变旋转方向。
而要改变电动机的旋转方向,必须改变电动机电磁转矩的方向,在该系统中,采用改变电动机电枢电压的极性。
对于大容量的系统,从生产角度出发往往采用既没有直流平均环流,又没有脉动环流可逆系统,无环流可逆系统省去了环流电控器,没有了附加的环流损耗,节省变压器和晶闸管装置的附加设备容量。
因此,逻辑无环流可逆调速系统在生产中被广泛运用。
本文通过对逻辑无环流可逆直流调速系统实验的分析,研究了逻辑无环流可逆直流调速系统各个重要环节的设计,并设计双闭环调速系统的双闭环调速系统的硬件,通过实际事物的安装与测试来验证本设计的正确性。
具体内容有:对电流调节器和转速调节器进行设计;对电流环和转速环进行单独测试;对双闭环流调速系统进行整体测试,对双闭环直流调速系统进行整体动态性能测试。
目录第一章课程设计概述 (3)1.1 设计背景及目的 (3)1.2 设计内容 (3)1.3 设计题目 (3)第二章设计方案比较和论证 (5)2.1 题目分析 (5)2.2 设计思想 (5)2.3 直流调速方式选择 (6)2.4 电源装置选择 (6)2.5 控制方案选择 (7)2.5.1 开环直流调速系统 (7)2.5.2 转速负反馈直流调速系统 (8)2.5.3 直流双闭环调速系统 (8)2.6 实现方式选择 (9)第三章系统各模块及其电路设计 (11)3.1 主回路设计 (11)3.2 控制回路设计 (12)3.2.1 给定单元 (13)3.2.2 转速调节器ASR (13)3.2.3 电流调节器ACR (15)3.2.4 逻辑控制单元DLC (16)3.2.5零转矩/零电流检测单元DPT/DPZ (17)3.2.6 零速封锁单元DZS (18)3.2.7 反号器 (18)3.2.8 触发电路 (18)3.2.9 电流反馈与过流保护 (19)第四章系统参数计算及元器件选择 (21)4.1 主回路参数计算及元器件选择 (21)4.1.1 整流变压器的选择 (21)4.1.2 整流晶闸管的选择 (21)4.1.3 平波电抗器的选择 (22)4.1.4保护电路参数计算 (22)4.2 控制回路参数计算 (23)4.2.1 系统静特性分析与计算 (23)4.2.2系统动态结构参数设计 (24)4.2.3 电流调节器的参数选择 (24)4.2.4 速度调节器的参数选择 (26)4.2.5 外限幅电路 (29)第五章系统调试及校正 (30)5.1 系统各功能模块性能的调试与测试 (30)5.1.1系统的相位整定 (30)5.1.2触发器的整定 (30)5.1.3 系统的开环运行及特性测试 (30)5.1.4 速度反馈特性的测试 (31)5.1.5 调节器的调试 (32)5.1.6 电流调节器ACR的调试 (32)5.1.7 反相器AR的调试 (32)5.2 系统整体功能测试 (34)5.3 系统小结 (34)第六章课程设计总结 (35)附录 (36)附录一:各种整流电路的失控时间 (36)附录二:逻辑无环流系统实验报告 (34)附录三:四辊可逆冷轧机卷取机直流调速系统原理图 (42)参考文献 (43)第一章课程设计概述1.1 设计背景及目的运动控制系统是自动化专业的主干专业课,具有很强的系统性、实践性和工程背景,运动控制系统课程设计的目的在于培养学生综合运用运动控制系统的知识和理论分析和解决运动控制系统设计问题,是学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法,提高学生调查研究、查阅文献及正确使用技术资料、标准、手册等工具书的能力,理解分析、制定设计方案的能力,设计计算和绘图能力,实验研究及系统调试能力,编写设计说明书的能力。

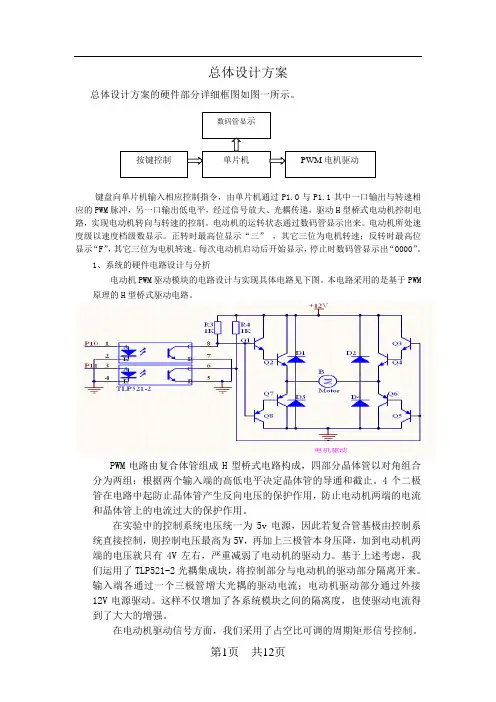
总体设计方案总体设计方案的硬件部分详细框图如图一所示。
键盘向单片机输入相应控制指令,由单片机通过P1.0与P1.1其中一口输出与转速相应的PWM 脉冲,另一口输出低电平,经过信号放大、光耦传递,驱动H 型桥式电动机控制电路,实现电动机转向与转速的控制。
电动机的运转状态通过数码管显示出来。
电动机所处速度级以速度档级数显示。
正转时最高位显示“三” ,其它三位为电机转速;反转时最高位显示“F ”,其它三位为电机转速。
每次电动机启动后开始显示,停止时数码管显示出“0000”。
1、系统的硬件电路设计与分析电动机PWM 驱动模块的电路设计与实现具体电路见下图。
本电路采用的是基于PWM 原理的H 型桥式驱动电路。
PWM 电路由复合体管组成H 型桥式电路构成,四部分晶体管以对角组合分为两组:根据两个输入端的高低电平决定晶体管的导通和截止。
4个二极管在电路中起防止晶体管产生反向电压的保护作用,防止电动机两端的电流和晶体管上的电流过大的保护作用。
在实验中的控制系统电压统一为5v 电源,因此若复合管基极由控制系统直接控制,则控制电压最高为5V ,再加上三极管本身压降,加到电动机两端的电压就只有4V 左右,严重减弱了电动机的驱动力。
基于上述考虑,我们运用了TLP521-2光耦集成块,将控制部分与电动机的驱动部分隔离开来。
输入端各通过一个三极管增大光耦的驱动电流;电动机驱动部分通过外接12V 电源驱动。
这样不仅增加了各系统模块之间的隔离度,也使驱动电流得到了大大的增强。
在电动机驱动信号方面,我们采用了占空比可调的周期矩形信号控制。
单片机 PWM 电机驱动数码管显示 按键控制脉冲频率对电动机转速有影响,脉冲频率高连续性好,但带带负载能力差脉冲频率低则反之。
经实验发现,当电动机转动平稳,但加负载后,速度下降明显,低速时甚至会停转;脉冲频率在10Hz以下,电动机转动有明显跳动现象。
而具体采用的频率可根据个别电动机性能在此范围内调节。
直流电机调速系统设计报告题目:H桥&串口输出2016年3月一、设计任务设计并制作一套直流电机调速系统,主要包括两部分:主电路部分和以单片机为核心的控制电路部分。
要求设计、制作控制电路和主电路,实现如下功能:(1)通过码盘和光耦得到一系列脉冲,利用M法、T法或M/T法对这些脉冲在单片机中进行处理得到电机的转速,在液晶或数码管上进行显示;(2)DC/DC电路能够正常工作,通过旋钮或键盘设定转速,并能够通过电力电子电路输出合适的电压,使电机的转速达到设定转速。
(3)实验室提供24V直流电源为DC/DC电路供电,其余部分电源请利用220V市电自行设计。
数码管显示单元DC直流电源DC码盘和光耦驱动与保护电路单片机系统旋钮输入图1 系统总体框图二、硬件电路设计与制作2.1 显示部分电路设计使用计数器采集到电机转速后,需要用数码管进行显示。
我们组选择串口驱动数码管显示电路,74HC595芯片是一种串入并出的芯片,是8位串行输入/输出或者并行输出移位寄存器,具有高阻、关、断状态。
首先使用三极管构成驱动电路,驱动数码管。
采用单片机的P0.0-P0.2作为74HC595时钟信号与输入口,使数码管显示相应转速,具体实现电路如图1。
图1 显示电路原理图2.2 驱动部分电路设计驱动部分作为电机与单片机控制器的结合部分,是本次设计的主电路,需要完成DC/DC变化的功能。
单片机产生PWM波送给驱动芯片IR2110,2110通过驱动电路控制MOSFET开关改变加在直流电机上的电压,从而达到改变转速的目的。
单片机产生的PWM1和PWM2波形要相反,控制斩波电路的半桥互补通断。
电路设计图如图2所示。
图2 驱动电路原理图2.3 电源部分设计电源设计部分共分两个部分,一部分是IR2110的供电电压和所有芯片的供电电压,另一部分是USB口供电电部分,使用电脑供电,两部分电路通过拨码开关进行切换。
市电供电电源采用220V交流电变成15V交流电,经整流桥变成直流电,再经7815、7805稳压得到15V和5V直流电,分别给驱动和单片机系统供电。
直流电机调速系统课程设计指导书一、实验目的1、通过对KZ-D系统开环机械特性和闭环机械特性的实测及研究,加深对负反应控制的根本原理的理解。
2、掌握操作实际系统的方法和必要参数的测定方法。
3、研究系统各参数间的根本关系及各参数变化对系统的影响。
4、加深比照例积分调节器动态传输特性的认识,了解其在无静差自动控制系统中的作用。
5、通过实践掌握工程实践中常见的双闭环无静差调速系统参数设计计算和ST调试方法。
5 DD03-2电机导轨﹑测速发电机及转速表6 DJ13 直流复励发电机7 DJ15 直流并励电动机8 D42 滑线变阻器串联形式:0.41A,1.8kΩ并联形式:0.82A,900Ω9 数字存储示波器自备10 万用表自备三、实验线路及原理晶闸管直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、电动机-发电机组等组成。
在本实验中,整流装置的主电路为三相桥式电路,控制电路可直接由给定电压U g作为触发器的移相控制电压U ct,改变U g的大小即可改变控制角α,从而获得可调的直流电压,以满足实验要求。
实验系统的组成原理图如图5-1所示。
图1-1 实验系统原理图四、实验容(1) 测定晶闸管直流调速系统主电路总电阻值R,电感值L,s K , 测定直流电动机电势常数C e 测定晶闸管直流调速系统机电时间常数T M (2) 转速调节器的调试,电流调节器的调试(3) 设计调速系统。
调速指标为D =10,S <10%;测定系统开环机械特性和∆n nom ,判断能否满足调速指标;如果不能满足,可采用转速负反应;计算及整定比例调节器参数、反应系数;测定闭环系统的机械特性。
(4) 设计及调试双闭环无静差KZ -D 调速系统要求额定转速时S ≤2%,电流超调量σi %<5%,转速起动到额定转速时,超调量σn ed n %<10%,负载扰动恢复时间小于05.s ,电动机过载倍数λ=12.,电流反应系数A V 615.4=β。
目录摘要 (I)Abstract (III)第1章绪论 (1)1.1 世界及我国钢铁工业的发展 (1)1.1.1 世界钢铁工业发展概况 (1)1.1.2 我国钢铁工业发展现状及展望 (4)1.2 世界及我国冷轧带钢的发展状况 (7)1.2.1 世界冷轧带钢的发展状况 (7)1.2.2 我国冷轧带钢的发展状况 (9)1.3 轧钢先进技术 (10)1.4 HC轧机在冷轧带钢中的应用 (11)第2章 HC轧机工作原理及结构特点 (15)2.1 HC轧机工作原理 (15)2.1.1 HC轧机工作原理 (15)2.1.2 HC轧机的板形控制 (16)2.1.2.1 横向厚度偏差的有效控制 (16)2.1.2.2 中间辊轴移对板形控制的有效性 (17)2.1.2.3 弯辊力调节板形的作用 (18)2.1.2.4 HC轧机板形控制的稳定性 (18)2.1.3 HC轧机的轧辊驱动 (19)2.1.4 HC轧机的类型 (19)2.2 HC轧机结构及特点 (20)2.2.1 HC轧机的结构 (20)2.2.2 HC轧机的特点 (20)第3章 HC轧机主要技术特性及结构说明 (23)3.1 工艺流程图 (23)3.2 轧机主要技术特性 (23)3.3 轧机关键结构说明 (24)第4章轧制规程及相关参数确定 (25)4.1 轧辊主要参数确定 (25)4.2 轧制规程制定 (25)4.3 确定各道次变形抗力 (26)4.4 计算各道次带钢张力 (27)4.5 各道次轧制力计算 (27)4.6 确定轧制速度制度 (30)4.7 计算轧制力矩 (30)4.8 机架主要结构参数确定 (31)第5章部件校核 (33)5.1 支承辊强度校核 (33)5.2 工作辊强度校核 (34)5.3 机架强度校核 (35)第6章 HC轧机辊系稳定性分析 (39)6.1 工作辊的稳定条件 (39)6.2 中间辊的稳定条件 (41)6.3 支撑辊的稳定条件 (41)6.4 有关角度的计算 (42)6.5 辊系的稳定条件 (43)结论 (45)参考文献 (47)致谢 (50)附录1 开题报告 (I)附录2 文献综述 (V)附录3 英文翻译 (IX)摘要板带材在国民经济各部门中具有广泛而重要的应用。
运动控制系统课程设计设计题目:某轧机主传动直流可控环流可逆运行调速系统设计学院:姓名:班级:学号:指导教师:日期:摘要长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。
直流调速系统是自动调速系统的主要形式,它具有良好的起、制动性能,可以在较宽的调速范围内实现平滑调速,较快的零动态响应过程,并且低速运转时力矩大这些极好的运行性能和控制特性,长期以来,直流调速系统一直占据着重要地位。
从市场的角度来看,直流调速系统在理论上和实践上都比较成熟,从控制技术的角度来看,它又是交流调速系统的基础。
所以在直流调速系统电气传动中获得了广泛应用。
本文从直流电动机的工作原理入手,建立了PWM双闭环可逆直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。
在理论分析和仿真研究的基础上,设计了一套实验用双闭环直流调速系统,详细介绍了系统主电路、、基准电源、转速调节电路、电流调节器电路、PWM波生成电路、桥式可逆直流脉宽系列电路及转速检测电路的具体实现。
然后按照自动控制原理,对双闭环调速系统的参数进行分析和计算,利用MATLAB中的Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
关键词:可逆直流调速系统速度环电流环模拟调节器MATLAB IGBTAbstractFor a long time,DC motor is the optimal choice for most variable motion control and closed loop position servo control system with excellent its good linear characteristics, control performance, etc. DC speed control system is the main form of the automatic speed regulation system, it has a good starting and brake performance, can be in a wider range of speed regulation of smooth realized in speed, fast dynamic response process, and low speed running torque these excellent performance and control characteristic, but for a long time, DC speed control system has been occupies an important position. From a market perspective, DC speed control system in theory and practice are more mature, from the point of view of the control technology, it is the foundation of ac speed adjustment system. So in dc speed control system in electric transmission won the widely used. This article from the working principle of dc machines, a PWM double closed loop reversible dc speed control system, and the mathematical model of detailed analysis of system principle and the static and dynamic performance. In the theory analysis and simulation research, and on the basis of design a set of experiments with double closed loop dc speed control system, detailed introduces system main circuit, sawtooth wave produces circuit, benchmark power supply, rotate speed adjustment circuit, current regulator circuit, PWM waves generated circuit, bridge type reversible dc speed pulse width series circuit and the realization of a detection circuit. Then according to automatic control theory, double closed loop speed regulation system, the design parameters of analysis and calculation the use of MATLAB of Simulink of the system parameters to the set of the simulation, through the simulation won the parameters setting the basis.Keywords: reversible do speed control system; Speed loop; Current loop; Simulation regulator; MATLAB;IGBT目录绪论--------------------------------------------------------------------------------------------------------4第一章设计内容及要求---------------------------------------------5第二章系统方案选择----------------------------------------------------------------------------6 1.直流电动机的调速方案的选择-------------------------------------6 2.主电路设计--------------------------------------------------------------------------------------8第三章控制电路及驱动电路设计-------------------------------------13 3.1 控制电路------------------------------------------------------13 3.2 驱动电路------------------------------------------------------17 第四章电流调节器与转速调节器的设计-------------------------------20 4.1 调节器工程设计方法的基本思路----------------------------------20 4.2 系统主要参数的计算--------------------------------------------20 4.3 电流调节器的设计----------------------------------------------21 4.4 转速调节器的设计----------------------------------------------25 第五章其他单元电路设计-------------------------------------------28 5.1 基准电源设计--------------------------------------------------28 5.2 转速检测电路--------------------------------------------------28 5. 3 本设计采用的励磁回路------------------------------------------29第六章系统各保护电路设计-----------------------------------------32 6.1 交流侧和直流侧保护--------------------------------------------32 第七章系统仿真---------------------------------------------------37 7.1 MATLAB仿真软件介绍------------------------------------------37 7.2 仿真模型的建立------------------------------------------------39 7.3 仿真如下------------------------------------------------------39总结---------------------------------------------------------------43 设计体会-----------------------------------------------------------44 附录-------------------------------------------------------------------------------------------------------45绪论可逆轧机为单机架轧机,进行多道次钢带轧钢。
题目:某轧机直流电动机可控环流可逆运行调速系统设计一、设计内容及技术要求1、采用转速、电流负反馈构成双闭环调速系统主电路采用三相全控桥、可控环流可逆系统。
励磁回路采用三相桥式晶闸管变流装置供电,构成励磁电流闭环系统。
2、技术数据(1)直流电动机数据:220V,136A,1000rpm,Ce=0.132V.min/r,允许过载倍数λ=1.5,电枢回路总电阻R=0.5Ω,系统运动部分的转动的转动惯量GD ²=20N.m ²。
(2)要求达到的性能指标:D=20,S≤5%,电流超调量σ≤5%,i转速无静差,且空载启动到额定转速是的转速超调量σ≤10%。
n3、设计内容及工作量(1)系统方案选择(2)主电路设计(3)触发电路与同步电路设计(4)转速调节器与电流调节器设计(5)控制电路设计(6)保护装置设计(7)画出系统电路图,并撰写设计说明书(8)答辩二、设计报告要求a)设计题目b)目录c)简要说明书设计内容、用途及特点d)本设计达到的性能指标e)本设计的基本原理f)设计方案选择g)具体各部分电路的设计过程、相关计算及元器件选择等h)绘制电路图i)参考文献、附录、设计总结(心得体会)三、进度安排该综合训练计划学时三周(15天)时间,进度安排如下:1、调速系统设计8天2、实验室7天四、主要参考文献1、电力拖动自动控制系统(第四版)机械工业出版社上海大学陈伯时主编。
2、电气传动自动化技术手册(第四版)机械工业出版社天津电气传动研究所编著目录1系统组成及工作原理 (4)1.1系统组成 (4)1.2工作原理图 (4)2 电路的设计 (6)2.1给定及偏移电源 (6)2.2双环调节器电路 (6)2.2.1转速调节器 (6)2.2.2电流调节器 (7)2.3触发器的设计 (7)2.4主电路的设计 (8)2.5转速及电流检测电路 (9)2.6反相器的设计 (10)3 调节器的参数整定 (11)3.1电流调节器参数整定 (12)3.2转速调节器设计 (13)3.2.1电流环的等效闭环传递函数 (13)3.2.2转速调节器结构的选择 (14)3.2.3转速调节器参数的选择 (15)3.2.4检验近似条件及转速超调量 (15)3.2.5转速调节器的实现 (16)设计总结与体会 (17)参考文献 (1)8附录.................................................................. (19)第一章绪论1.1设计背景可逆冷轧机为单机架轧机,进行多道次钢带可逆轧制。
辽宁工业大学交流调速控制系统课程设计(论文)题目:带钢开卷和卷取过程中的变频调速系统设计院(系):电气工程学院专业班级:自动化111学号:学生姓名:指导教师:(签字)起止时间:2014.12.15-2014.12.26课程设计(论文)任务及评语院(系):电气工程学院教研室:自动化Array注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算摘要带钢的生产技术是钢铁工业发展水平的一个重要标志。
薄钢板除了供汽车、农机、化工、食品罐头、建筑、电器等工业使用外,还与日常生活有直接关系,如家用电冰箱、洗衣机、电视机等都需要薄钢板。
因而在一些工业发达的国家中,薄钢板占钢材的比例逐年增加,在薄板、带钢中,冷轧产品占很大部分。
随着电力电子技术以及变频调速技术的发展,交流调速技术逐渐成为主流,为轧钢企业带来了巨大的经济效益。
本文针对某冷轧带钢制品厂轧机的改造工程,把可编程控制器和变频器应用于冷轧机开卷和卷取控制系统上,对带刚的开卷和卷曲过程中的张力进行恒张力控制。
在本系统中采用MM440变频器,此变频器具有闭环速度/转矩控制功能,能很好的解决转速和转矩问题,采用西门子S7-200PLC完成数据的采集,运算和对变频器、电动机的控制,利用组态软件MCGS建立良好的人机界面,使工作人员可以实现变频器的参数设置、电动机的启动、停止和系统故障报警。
关键词:恒张力控制;矢量控制;变频调速;组态软件目录第1章绪论 (1)第2章带刚开卷和卷取过程方案设计 (4)2.1 带刚开卷和卷取过程框图的设计 (4)2.2 交流变频调速技术的恒张力控制 (4)2.3 PID控制算法 (5)2.4 带刚交流变频调速系统的硬件选型 (7)第3章变频调速系统的设计 (10)3.1 变频器的选型 (10)3.2 MM440变频器操作板(BOP)的调试步骤 (12)第4章 MCGS监控画面的设计 (18)4.1 MCGS的功能介绍及操作方法 (18)4.2MCGS监控画面的设计 (19)第5章课程设计总结 (21)参考文献 (22)第1章绪论冷轧的薄板、带钢产品具有表面质量好、尺寸精度高和良好的机械、工艺性能等优点,被广泛应用于宇航技术、人造卫星、火箭、电子、汽车、化工、家用电器、建筑、食品以及小五金等国民经济各个部门。
六辊可逆轧机直流传动系统的设计与优化作者:王亮来源:《硅谷》2012年第19期摘要:介绍莱钢冷轧生产线2#轧机直流传动系统的设计方案及其在使用过程中对出现的问题的优化,通过对问题的解决总结设计和维护经验,保证设备在生产过程中稳定顺行。
关键词:直流传动系统;设计;优化;稳定顺行有五台变压器、九台他励直流电机和相应的九套直流传动装置柜。
该设备投入生产以来设备故障频繁出现,严重制约着生产顺行。
我们针对这些问题,对设备进行优化,使设备达到了稳定运行的目标。
1 设计方案1)本系统主回路:35kv进线电源经变压器降压后(790v左右)进入功率柜的功率模块,经过功率模块整流后作为他励直流电机的电枢电源;有MCC引出的三相电源中的两相电源进入6RA70直流传动装置,经过整流后作为他励直流电机的励磁电源。
主回路见图1所示:2)直流传动柜有进线柜、功率柜和控制柜三部分组成。
进线柜主要设备是进线断路器,它是传动柜总电源开关,设有电压表显示进线电压。
功率柜主要有可控硅整流电路、脉冲分配板、功率单元和变压器等组成。
脉冲分配板接受来自功率单元的控制信号后,按PWM控制算法生成IGBT的控制信号,从而控制可控硅整流电路把进线交流电整流为直流电供给电机电枢。
控制柜主要设备有6RA70直流传动装置、各种控制电源和柜内冷却风机电源等,主要完成各种控制和通信功能。
2 存在的问题及优化2.1 卷取机传动装置频繁跳电故障现象:直流调速装置多次报F004故障(电枢电源中的相电压故障)。
此时进线断路器已经跳闸,且断路器面板上的AP灯亮。
处理优化:后经查看电流曲线,断路器跳闸时才达到额定电流的40%左右,并无过流现象。
经后来实验得出直流调速装置报F004故障为断路器跳闸后报出,这就将故障点锁定在断路器。
高压配电室在线监控断路器跳闸时报出差动保护动作,但当时轧制正常,电流和转矩也都在正常状态下,可以断定此差动保护信号为假信号,暂时屏蔽才信号后断路器跳闸现象减轻,但断路器面板上的AP指示灯复位后在轧制起步时仍会点亮,现在可以确定是断路器的原因导致频繁跳闸。
自动控制系统课程设计设计题目:全数字直流调速系统班级:学号:姓名:指导教师:设计时间:摘要全数字直流调速系统是当前工业控制领域广泛应用的技术,其操作非常简单,并且不需要专门的编程知识,所有设置均可通过参数设定设备进行。
参数设定也可通过PC 的菜单提示进行,以实现快速地投入运行。
本文对SIMOREG DC Master 6RA70 系列全数字直流调速装置进行了系统地介绍以及使用方法和功能的说明。
文章主要就几个工业生产中比较基础的控制系统进行了详细介绍,主要包括:系统的初始参数输入与优化、直流电动机的高、低速调节、直流电动机的点动控制、直流电动机的爬行控制、电枢电流闭环控制、开环调速系统设定调整、单闭环调速系统设定调整等。
使用Driver Mon软件对其参数进行修改,并用示波器观察输出波形。
将实验波形与理论波形对比,对实验结果进行分析总结,最终得出结论。
关键字:6RA70,直流调速,双闭环,Driver Mon软件- 1 -目录摘要 .............................................................................................................................................- 1 -1. 概述........................................................................................................................................- 3 -2. 设计任务及要求.................................................................................................................- 4 -3. 理论设计 ..............................................................................................................................- 5 -3.1系统的连接.......................................................................................................................- 5 -3.2 系统的初始参数输入......................................................................................................- 6 -3.3 系统电流环、转速环参数自动优化..............................................................................- 7 -3.4 电枢电流闭环控制........................................................................................................- 9 -3.5 直流电动机的高、低速调节..................................................................................... - 10 -3.6 直流电动机的点动控制............................................................................................. - 10 -3.7 方波发生器................................................................................................................. - 12 -3.8 斜坡函数发生器......................................................................................................... - 13 -3.9 直流电动机的爬行控制............................................................................................. - 15 -3.10 固定值给定............................................................................................................... - 17 -3.11 单闭环调速系统....................................................................................................... - 17 -3.12 开环调速系统........................................................................................................... - 20 -4. 系统设计 ........................................................................................................................... - 22 -4.1系统简介........................................................................................................................ - 22 -4.2 实物接线....................................................................................................................... - 25 -5. 安装调试 ........................................................................................................................... - 26 -5.1安装调试过程................................................................................................................ - 26 -5.2 故障分析....................................................................................................................... - 29 -6. 结论..................................................................................................................................... - 31 -7. 使用仪器设备清单 ......................................................................................................... - 32 -8. 收获、体会和建议 ......................................................................................................... - 32 -9. 参考文献 ........................................................................................................................... - 33 -- 2 -1. 概述目前,随着交流调速技术的发展,交流传动得到了迅猛的发展,但直流传动调速在诸多场合仍有着大量的应用。
LANZHOU UNIVERSITY OF TECHNOLOGY运动控制系统综合训练报告题目某轧机直流电动机调速系统设计学生姓名学号专业班级控制工程基地一班指导教师学院电信工程学院答辩日期直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性;尽管近年来不断受到其他电动机(如交流变频电机、步进电机等)的挑战,但到目前为止,它仍然是大多数调速控制电动机的优先选择。
双闭环直流调速系统是一个复杂的自动控制系统,是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都比较成熟的系统,在拖动领域中发挥着极其重要的作用。
近年来,直流电动机的结构和控制方式都发生了很大变化。
随着计算机进入控制领域以及新型的电力电子功率原件的不断出现,使采用全控型的开关功率元件进入脉宽调制(PulseWidthModulation,简称PWM)控制方式已成为绝对主流。
这种控制方式很容易在单片机控制中实现,从而为直流电动机控制数字化提供了契机。
关键字:直流调速双闭环控制 PWM 三相桥式 IGBT摘要第一章绪论 (1)第二章直流调速系统的方案确定 (2)2.1系统的技术数据要求 (2)2.2直流调速系统的方案选择 (2)2.3双闭环直流调速系统的静特性 (6)第三章主电路和励磁回路的设计与分析 (7)3.1 PWM变换器介绍 (7)错误!未定义书签。
.2励磁回路的选择 (10)第四章主电路元部件及参数计算 (11)4.1整流变压器容量计算 (11)4.2 IGBT管的参数 (11)4.3三相不可控桥整流二极管选择 (13)4.4滤波电容选择............................. 错误!未定义书签。
4.5 交流侧过电压保护 ........................ 错误!未定义书签。
毕业论文题目:带钢冷轧机直流调速系统设计与仿真英文题目:The strip of cold rolling mill dc speed control system design and simulation二零年月日摘要作为电力传动的主要动力设备,根据不同的工作要求,对转速有特殊限制来满足特定的生产需求。
直流电动机控制性能好,加上双闭环调速的介入,使启动性能和抗干扰性能大大改善。
做好双闭环调速系统的研究十分重要。
目前直流电动机的调速较多采用了电流和转速双闭环控制。
且转速调节器采用了PI调节,既可以保证动态稳定,而且可以消除静态误差,另外通过引入电流截至负反馈还能限制电流冲击。
电流和转速分开控制,从而得到了较好的动静态特性。
依据电流和转速两个调节器构成直流电动机双闭环调速系统,建立数学模型,分析启动过程和抗干扰调解过程,并依据要求设计电流调节器和转速调节器,在进行必要的硬件电路的设计与调试,最后运用MATLAB软件进行电流环和转速环的动作仿真。
关键词:双闭环;直流电动机调速;转速调节器;MATLABABSTRACTAs the main motive power transmission equipment, according to the different requirements of speed limit, to meet the special needs of specific production. Dc motor control performance is good, plus double closed loop speed regulation, make start-up performance and anti-jamming performance improved. Do double closed loop speed regulation system of study is very important.Currently the dc current and speed is more USES double closed loop speed. And the speed regulator USES PI, can guarantee dynamic stability, and can eliminate static error, through introducing the current negative feedback can also limited by current shock. Current and speed control, separate to obtain better dynamic and static characteristics.According to the current and speed regulator constitute two dc double closed loop speed regulation system, the mathematical model is analyzed, and the anti-interference mediation process start-up process, and according to the requirements and the design of speed regulator, current regulator in the hardware circuit to the design and debug, finally using MATLAB software current loop and the movement speed loop simulation.Key Words: double closed loop speed; DC current regulator; the speed regulator; MATLAB目录绪论 (1)1.1 概述 (1)2冷轧机的概念 (2)2.1.1冷轧机简介 (2)2.1.2工作原理 (2)2.2直流调速系统的概述 (2)2.2.2固有机械特性 (3)2.2.3开环控制和闭环控制 (3)2.3直流调速方式 (3)2.3.1研究背景 (3)2.4我国冷轧的发展历史 (4)2.4.1应用现代控制理论 (4)2.4.2采用总线技术 (4)2.4.3内含嵌入式操作系统的控制器正在进入电动机控制领域 (4)2.5冷轧机的发展 (5)2.7 本课题采用的技术方案及技术难点 (6)3 系统总体方案 (7)3.1 三相桥式整流电源 (7)3.2 整流装置的放大系数和传递函数 (8)3..3 稳态结构框图和静态特性 (10)3..3.1 转速调节器不饱和 (10)3..3.2 转速调节器饱和 (11)3.4 各变量的稳态工作点和稳态参数计算 (11)4 电流和转速调节器的设计与选择 (13)4.1 双闭环调速系统数学模型的建立 (13)4.1.1 电流环结构的简化 (13)4.1.2 确定时间常数 (14)4.2 转速调节器的设计 (14)4.3 确定时间常数 (16)4.4 选择转速调节器结构与参数 (16)5 双闭环调速系统仿真 (18)5.1概述 (18)5.2 系统动态结构的MA TLAB仿真 (18)5.3 仿真模型的建立 (20)5.4 系统的整体结构的仿真 (21)5.5流电压源模块对话框 (22)5.6仿真图形 (24)总结 (26)致谢 (27)参考文献 (28)附录1 (29)附录2 (32)绪论1.1 概述带钢冷轧机是对冷轧钢筋进行冷拉,冷轧,可以提高抗拉位,抗压的同时,使其然保留足够的钢的延伸特性,使冷轧钢筋的轧扁厚度,界面宽厚比,面缩效率和节距等四项材质指标具有强大的抗拉强度,延长效率和冷弯的作用。
摘要此次课程设计题目《850mm六辊可逆冷轧机开卷机直流调速系统》,核心落在转速、电流双闭环逻辑无环流调速系统的设计,是基于本学期所学课程《电力拖动自动控制系统—运动控制系统》的一次学以致用的深入拓展。
本文针对直流调速系统进行调速设计。
尽管近年来,电力电子变换器中以晶闸管为主的可控器件已经逐步被功率开关器件所替代;伴随着变换技术由相位控制转向脉宽调制(PWM);交流可调拖动系统正逐步取代直流拖动系统,但是直流拖动本身具有理论和实践都很成熟的优势,我国早期的许多生产设备均采用直流拖动系统短时间内不会淘汰,而且直流电机原理相对简单易懂,因而对于初学者而言,直流调速还是很有实际意义的。
从生产机械要求的控制物理量来看,电力拖动自动控制系统分为调速系统、位随系统、张力控制系统、多电机同步控制系统等多种类型;按照调速方式大致可分为开环调速和闭环调速两大类,开环系统结构简单、易于实现、维护简单,但是其静特性与动态特性往往不满足生产和控制要求,而闭环系统尤其是双闭环调速系统具有良好的静特性和动态特性,采用PI调节器时可实现转速无静差以及电流无静差。
本次设计包括各元器件的参数配合与选择、调速方案的设计、整体电路图的绘制等,同时考虑到调速系统实际运用于六卷可逆冷轧机开卷机,各参数与方案都按照实际工程需要设计。
关键字:转速环、电流环、双闭环调速、逻辑无环流、DLC、开卷机、六辊、晶闸管绪论薄板、带钢的生产技术是钢铁工业发展水平的一个重要标志。
冷轧钢板的生产主要是采用3~6机架的多辊冷轧机,特点是生产率高,机械化、自动化程度高,产品质量好。
连轧机仅适用于产量大,品种规格单一的钢种冷轧生产,而对于生产量较小、质量要求较高、品种规格复杂的高合金钢和合金冷轧带材,采用连轧机并不恰当,而大多采用多辊可逆轧机。
带钢冷轧机生产线上除了五机架连轧机主体设备外,还包括头部的上料设备、开卷机以及尾部卷取机,有的在轧制头部还有矫直机、焊接机以及活套等设备。
这些设备要要步调一致,密切配合,以保证连轧机位置控制、厚度控制、张力控制、速度控制以及板形控制的顺利进行。
五机架冷连轧机的出现必须有自动控制和以计算机技术为基础。
冷轧机最初是在二辊、四辊基础建立起来的,科学技术和工业的发展需要极薄带材,原有低辊数轧机已经不能满足要求,因为轧辊本身的弹性压扁值往往比所需轧制带材厚度还要大,而轧辊的弹性压扁是与辊径成正比的。
当轧辊材质一定时,要降低轧辊弹性压扁就必须减小辊径,而辊径的减小又会出现刚性不够的矛盾。
为此,多辊轧机出现以提供良好刚性的塔形支撑辊系。
多辊轧机发展很快,根据加工工艺要求,有八辊、十二辊、二十辊等。
开卷机作为连轧设备的首端,需要可逆工作,既需要转速控制又需要张力控制。
当开卷机工作于换卷引带或断带时,系统外环即速度环调机器投入工作,这是一个速度调节系统;当带材咬入后,产生张力,使ASR的反馈小于给定值,处于饱和状态,其限幅值就是张力给定值,系统作为一个恒功率调剂系统而工作,维持张力恒定。
本设计采用转速、电流双闭环逻辑无环流调速。
目录第一章设计参数和要求第二章各功能模块器件选择开卷电机的选择 (5)整流方案的选择 (5)晶闸管的选择 (6)交流进线电抗器的选择 (6)变压器容量的选择 (7)晶闸管的保护 (7)开卷电机的过电流保护,串联熔断器 (9)晶闸管冷却风机的选择 (9)励磁回路 (10)交流电流互感器TA (12)测速发电机 (12)给定电路 (13)低压直流源设计(±24V) (13)空气开关的选择 (13)第三章双闭环调速系统的设计典型转速、电流双闭环调速系统结构 (14)典型转速、直流双闭环调速系统的设计 (14)ACR(电流环调节器)的设计 (14)ASR(转速环调节器)的设计 (18)第四章逻辑无环流系统的实现典型逻辑控制的无环流可逆调速系统 (24)无环流逻辑控制环节DLC (24)晶闸管集成触发器 (28)第五章开卷机张力控制开卷机张力控制系统 (31)第六章辅助电路辅助电路结构以及作用 (32)第七章操作电路操作结构以及作用 (32)总结 (33)参考文献 (34)第一章设计参数和要求一、设计内容及要求:(一)、系统各环节选型1、主回路方案确定2、控制回路选择(二)、主要电气设备的计算和选择1、晶闸管整流元件:电压定额、电流定额计算及选择2、系统各主要保护环节的设计:快速熔断器计算选择、阻容保护电路选择电流环超调量:σi≤5%转速环超调量:σn≤10%允许过载倍数:三、设计环境主要由主电路和控制电路组成,主电路由开关、交流接触器、晶闸管整流装置和保护器件组成、控制电路主要由运算放大器构成的控制器组成。
第二章各功能模块器件选择开卷电机的选择850mm六辊可逆开卷电机:数量1,DC电机上海南洋Z4系列额定电压:440V,额定电流:400A,额定功率:168kW,电机转速:500/900 rpm 绝缘等级:B级工作制:S1过载倍数:冷却方式:自带通风机强迫风冷特性:电枢可不加平波电抗器,调速范围广,过载能力强,可弱磁调速整流方案的选择采用反并联三相全控整流桥。
无环流工作,任何情况下只允许一组整流器工作,而另一组必须被封锁,以保证不出现环流,通常采用如图2-1所示反并联可逆线路。
图2-1 反并联三相全控整流桥晶闸管的选择晶闸管额定电压U RRM电压的影响,由技术手册,对于三相桥式整流线路晶闸管可按如下表格选取由电机额定参数:U N=440V , I dN=400A查表选择U RRM=1500V,二次相电压有效值为460/√3 =266V晶闸管通态平均电流I T(AV)I T(AV)≥~K IT·I dmaxK I·n pK IT:电流计算系数,查表取K IT =n p:晶闸管并联数,取n p =3K I:均流系数,一般取K I =~I dmax:最大整流电流值,取I dmax =λI N ==600A代入计算:I T(AV)≥0.367x6000.8x3=184A保证留有裕量,取I T(AV)=200A晶闸管型号的选择综上,晶闸管型号选取KP300-15交流进线电抗器的选择由技术手册,单机容量在500kW以下的中小容量装置,可用几台组成一组,用公用变流变压器供电,每台晶闸管装置通过图2-2所示交流电抗器供电,其主要作用:1、限制晶闸管导通时的di/dt以及限制变流装置发生故障和短路时短路电流的上升速率。
2、改善电源电压波形,消除变流器运转时对电源系统的公害。
图2-2 交流进线电抗器交流电抗器的电感量计算公式为:L=0.04UVФ2πfx0.816I dNx103 = 0.04x2652πx50x0.816x400= mH,取变压器容量的选择一次容量(VA)S1= m1K ILK UV U d0I dN= 3x0.8162.34x594x400=248566 VA二次容量(VA)S2= m2K ILK UV U d0I dN= 3x0.8162.34x594x400=248566 VA等值容量(VA)S T= 12(S1+ S2)=248566 VAU d0—空载整流电压m1、m2—变压器一、二次绕组相数,对于三相全控桥m1=m2=3查技术手册,变流变压器容量取250 kVA晶闸管的保护晶闸管换相过压保护,并联RC阻容电路图2-3 晶闸管换相过压保护由于载流子的集蓄效应,当晶闸管在反压下载流子迅速消失恢复阻断时,电路中感性成分会使得器件两端出现换相过电压。
对于三相桥式整流电路,在中小功率的变流装置中,由经验一般选取C=~μF,R=10~40Ω本次设计中取C=μF,R=40Ω晶闸管过电流保护,整流桥臂添加快速熔断器图2-4整流桥臂串熔断器过压保护熔体额定电流I re≥I ge ==300A,取350A熔体额定电压U re≤F√2 K2 = √2 X460√2 X1.5=307V,取300V选型:RN1-1 / 350 -500 ,为户内式。
额定电压1kV、额定电流350A 、断开容量为500MVA。
整流装置过电压保护,交流侧整流式阻容保护图2-5 整流式阻容过压保护电路三相整流式阻容保护电路,过压时电压充入C储能,过压过去后C通过R2放电耗能。
u k%--变压器短路比,对于10~560kVA的三相变压器,取5~10,本设计取10i o%--变压器激磁电流百分数,对于10~560kVA的三相变压器,取4~10,本设计取10 S --变压器每相平均计算容量,取1/3S2=1/3x250=83kVA=83000VAU2–变压器次级相电压有效值,取266V变压器次级Y 接时,C ≥6i o %S U 22=6X10X 83000266 =μF ,取75μF 电容耐压≥U 2 ==399VR1≥U 22S √uk%io% =266x26683000√1010=Ω,R1取3Ω13C X 104<R2≤15CX 106,即45Ω~Ω,R2取2 k Ω 开卷电机的过电流保护,串联熔断器图2-6 开卷电机串熔断器过电流保护考虑到躲过电机启动电流,对于频繁启动的开卷机,按经验公式取:I Fe = (~) I dN = ~X400 = 600~1400A本次设计取I Fe =1400A ,选型:RN1-1 / 1400 -500。
晶闸管冷却风机的选择由于大功率晶闸管工作过程中会产生大量热量,如不及时散热将会烧毁晶闸管,因此冷却风机的配备是必须的。
由于冷却风机工作要求低,此次设计选取Y 系列低压三相异步电机,容量2kW ,调速范围750~3000 rpm ,工作电压380V ,全封闭自扇冷。
图2-7 晶闸管散热冷却风机断路器QF的选择根据技术手册,选择一般型DW16,低压断路器(空气开关)主要用在不频繁操作的低压配电线路中做电源开关使用,当发生严重过流、过载、短路、断相、漏电等故障时能自动切断电路,起到保护作用。
已知风机容量2kW,工作电压380V,求得风机工作电流约为5A,由此取断路器工作电压U e=380V,I e=10A。
接触器KM的选择选择3TF系列,工作电压380V,工作电流9~400A,适用于控制交流电机。
热继电器FR的选择由技术手册,选择3UA系列热继电器与3TF系列接触器配套使用。
熔断器器FU的选择选择RCIA系列插入式熔断器,工作电压380V,工作电流200A内。
励磁回路弱磁调速原理(弱磁升速)在他励直流电动机的调速方法中,如果需要从基速向上调速,则要采用弱磁调速的方法,通过降低励磁电流,以减弱磁通来提高转速。
转速越高,磁通越弱,容许的转矩不得不减少,转矩与转速的乘积则不变,即容许功率不变,是为“恒功率调速”。
在基速以下调压调速时,保持磁通为额定值不变;在基速以上弱磁升速时,保持电压为额定值不变。