飞行动力学习题课(二)2014讲解
- 格式:ppt
- 大小:962.00 KB
- 文档页数:29
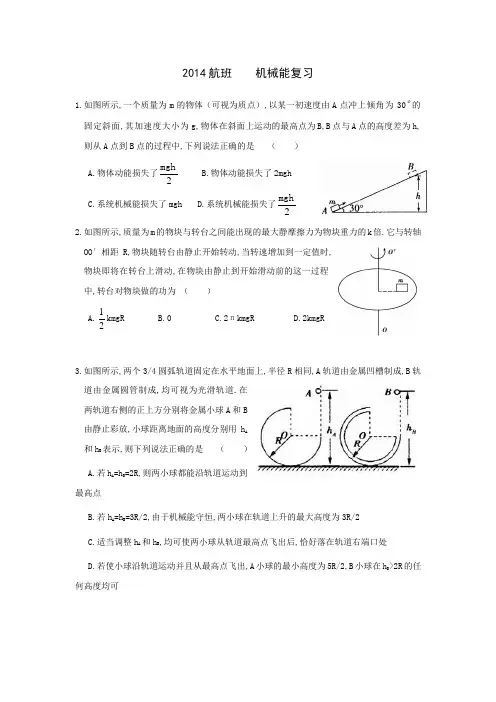
2014航班 机械能复习1.如图所示,一个质量为m 的物体(可视为质点),以某一初速度由A 点冲上倾角为30的固定斜面,其加速度大小为g,物体在斜面上运动的最高点为B,B 点与A 点的高度差为h,则从A 点到B 点的过程中,下列说法正确的是 ( )A.物体动能损失了B.物体动能损失了2mghC.系统机械能损失了mghD.系统机械能损失了 2.如图所示,质量为m 的物块与转台之间能出现的最大静摩擦力为物块重力的k 倍.它与转轴OO ′相距R,物块随转台由静止开始转动,当转速增加到一定值时,物块即将在转台上滑动,在物块由静止到开始滑动前的这一过程中,转台对物块做的功为 ( )A.kmgR B.0 C.2πkmgR D.2kmgR3.如图所示,两个3/4圆弧轨道固定在水平地面上,半径R 相同,A 轨道由金属凹槽制成,B 轨道由金属圆管制成,均可视为光滑轨道.在两轨道右侧的正上方分别将金属小球A 和B由静止彩放,小球距离地面的高度分别用h A和h B 表示,则下列说法正确的是 ( )A.若h A =h B =2R,则两小球都能沿轨道运动到最高点B.若h A =h B =3R/2,由于机械能守恒,两小球在轨道上升的最大高度为3R/2C.适当调整h A 和h B ,均可使两小球从轨道最高点飞出后,恰好落在轨道右端口处D.若使小球沿轨道运动并且从最高点飞出,A 小球的最小高度为5R/2,B 小球在h B >2R 的任何高度均可2mgh 2mgh 214.光滑水平面上静止的物体,受到一个水平拉力作用开始运动,拉力F随时间t变化如图所示,用E k、v、s、P分别表示物体的动能、速度、位移和接力F的功率,下列四个图象分别定性描述了这些物理量随时间变化的情况,其中正确的是()答案 BD5、一质量为m的物体做初速度为v0的平抛,求第ns内的重力的平均功率和第ns末重力的瞬时功率。
6.如图所示,AB为1/4圆弧轨道,半径为R=0.8m,BC是水平轨道,长S=3m,BC处的摩擦系数为μ=1/15,今有质量m=1kg的物体,自A点从静止起下滑到C点刚好停止。

第四章 第二次作业及答案1. 考虑地球为自转椭球模型,请推导地面返回坐标系及弹道坐标系(半速度坐标系)下航天器无动力再入返回质心动力学方程和运动学方程,以及绕质心旋转动力学和运动学方程。
解答:(1)地面返回坐标系:原点位于返回初始时刻地心矢径与地表的交点处,ox 轴位于当地水平面内指向着陆点,oy 垂直于当地水平面向上为正,oz 轴形成右手坐标系。
地面返回坐标系下的动力学方程:与发射坐标系下的动力学方程形式相同,令推力为0即可得到。
(2)弹道(航迹,半速度)坐标系定义:原点位于火箭质心,2ox 轴与速度矢量重合,2oy 轴位于包含速度矢量的当地铅垂平面内,并垂直于2ox 轴向上为正,2oz 轴形成右手坐标系。
由于弹道坐标系是动坐标系,不仅相对于惯性坐标系是动系,相对于地面返回坐标系也是动系,在地面坐标系下的动力学方程可以写为:惯性系下:22222()=F=++m e e e d m m m m t dt tδδδδ=+⨯+⨯⨯r r rωωωr P R g地面系下:22=++m -2-()e e e m m m t tδδδδ⨯⨯⨯r rP R g ωωωr弹道系下:22=()=++m -2-()t e e e m m m m m t t t tδδδδδδδδ'=+⨯⨯⨯⨯'r v v rωv P R g ωωωr 式中,tδδ''v 表示速度矢量在弹道坐标系的导数,t ω表示弹道坐标系相对于地面坐标系的旋转角速度,将上式矢量在弹道坐标系分解得到:速度矢量00v ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦v ,角速度矢量=tx t ty tz ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦ωωωω 00cos 0sin 00sin =+=()001000sin 0cos 0cos t y L σσσθσσσσθσσθσθ⎡⎤--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+=+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ωθσ sin 0cos 0=0cos 0sin 0cos cos 0sin 00t v v v v σθσθσσσθσθσθσθσσθσ⎡⎤⎡⎤--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯⨯==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ωv 等式左边:()=cos t vm v tv δσθδσ⎡⎤'⎢⎥+⨯⎢⎥'⎢⎥-⎣⎦vωv 等式右边将所有力转换到弹道坐标系下,如果不方便直接转换,可以先转到地面系,然后再转到弹道系。
第2课 课后习题参考答案一、填空1. 飞行控制系统的核心问题是研究由(控制系统)和(飞行器)组成的闭环回路的静、动态性能。
2. 典型的飞行控制系统一般由三个反馈回路构成,即(舵回路)、(稳定回路)和(控制回路)。
3. 根据功能和作用,基本的飞行自动控制系统包括(阻尼器)、(增稳系统)、(控制增稳系统)和(自动驾驶仪)。
4. 飞机的姿态角是由(机体)坐标轴系和(地面)坐标轴系之间的关系确定的,即通常所指的(欧拉角)。
5. 迎角的定义是(速度矢量V 在飞机对称平面内的投影)与机体轴ox 之间的夹角。
6. 侧滑角的定义是速度矢量V 与(飞机对称平面)之间的夹角。
7. 升降舵后缘(向下)偏转为正,产生的升力增量(为正),产生的俯仰力矩(为负)。
8. 方向舵后缘(向左)偏转为正,产生的侧力(为正),产生的偏航力矩(为负)。
9. 副翼差动偏转,(左上右下)偏转为正,产生的滚转力矩(为负)。
10. 常规飞机的运动通常利用(升降舵)、(方向舵)、(副翼)和(油门杆)来控制。
二、简答1.分别说明地面坐标系、机体坐标系和速度坐标系的定义。
答:(1)地面坐标系:原点取为地面上某一点;x 轴在地平面内并指向某一方向;y 轴位于地平面内且垂直于x 轴指向右方;z 轴垂直于地平面并指向地心。
(2)机体坐标系:原点取为飞机质心处,坐标系与飞机固连;x 轴在飞机对称平面内平行于飞机的设计轴线并指向机头方向;y 轴垂直于飞机对称平面指向机身右方;z 轴在飞机对称平面内垂直于x 轴并指向机身下方。
(3)速度坐标系:原点取为飞机质心处,坐标系与飞机固连;x 轴与飞行速度方向重合一致;z 轴在飞机对称平面内垂直于x 轴指向机身下方;y 轴垂直于x 轴和z 轴构成的平面并指向机身右方。
2.分别说明姿态角、气流角和航迹角的定义。
答:(1)姿态角:俯仰角:机体轴x 轴与水平面的交角,抬头为正;滚转角(倾斜角):机体轴z 轴与包含机体轴x 轴的铅垂面之间的夹角,飞机右滚转为正;偏航角(航向角):机体轴x 轴在地平面上的投影与地面坐标系x 轴间的夹角,机头右偏航为正。
目录1.请推导飞机小扰动运动方程,并分析其使用条件。
(2)2.什么是驾驶员操纵期望参数,分析其含义。
(12)3.请列写敏捷性尺度并对其含义进行分析说明。
(13)4.试说明评估飞机飞行性能的基本内容和基本方法。
(16)1.请推导飞机小扰动运动方程,并分析其使用条件。
一、小扰动法简介(1)基本概念研究飞行器的稳定性和操纵性问题时,一般把飞机运动分为基准运动和扰动运动。
基准运动(或称未扰动运动)是指在理想条件下,飞行器不受任何外界干扰,按预定规律进行的运动,如定直平飞、定常盘旋等。
基准运动参数用下标“*”表示,如V、*α、*θ等。
*由于各种干扰因素,使飞行器的运动参数偏离了基准运动参数,因而运动不按预定的规律进行,这种运动称为扰动运动。
受扰运动的参数,不附加任何特殊标记,例如V、α、θ等。
与基准运动差别甚小的扰动运动称为小扰动运动。
(2)基本假设在小扰动假设条件下,一般情况就能将飞行器运动方程进行线性化。
但为了便于将线性扰动运动方程组分离为彼此独立的两组,即纵向和横侧小扰动方程组,以减少方程组阶次而解析求解,还需要做下列假设:1)飞行器具有对称平面(气动外形和质量分布均对称),且略去机体内转动部件的陀螺力矩效应。
2)在基准运动中,对称平面处于铅垂位置(即0φ=),且运动所在平面且运动所在平面与飞行器对称平面相重合(即0β=)。
在满足上述条件下,可以认为,在扰动运动中,纵向气动力和力矩只与纵向运动参数有关,而横侧向气动力和力矩也只与横侧运动参数有关。
有了这些推论,就不难证明扰动运动方程可以分离为彼此独立的两组。
其中一组只包含纵向参数,即飞行器在铅垂平面内作对称飞行时的运动参数,,,,,,,,,g g e p u w q x z αθγδδ等,称为纵向扰动运动方程组;另一组只包含横侧参数,即飞行器在非对称平面内的运动参数,,,,,,,,,,g a r v p r y βψχφμδδ等,称为横侧向扰动运动方程组。
《飞行动力学》掌握知识点第一章掌握知识点如下:1)现代飞机提高最大升力系数采取的措施包括边条翼气动布局或近耦鸭式布局2)飞行器阻力可分为摩擦阻力、压差阻力、诱导阻力、干扰阻力和激波阻力等3)试描述涡喷发动机的三种特性:转速(油门)特性,速度特性,高度特性并绘出变化曲线. P8 答:转速特性是在给定调节规律下,高度和速度一定时,发动机推力和耗油率随转速的变化关系。
速度特性是在给定调节规律下,高度和转速一定时,发动机推力和耗油率随飞行速度或Ma的变化关系。
高度特性是在发动机转速和飞行速度一定时,发动机推力和耗油率随飞行高度的变化关系。
第二章掌握知识点如下:1)飞机飞行性能包括平飞性能、上升性能、续航性能和起落性能。
2)飞机定直平飞的最小速度受到哪些因素的限制?答:允许升力系数,抖动升力系数,最大平尾偏角,发动机可用推力。
3)为提高飞机的续航性能,飞机设计中可采取哪些措施?答:设计中力求提高升阻比,增加可用燃油量,选用耗油率低,经济性好的发动机,选择最省油状态上升和最佳巡航状态巡航。
第三章掌握知识点如下:1)了解飞机机动性的基本概念。
答:飞机机动性是指飞机在一定时间内改变飞行速度,飞行高度和飞行方向的能力,相应的分为速度机动性,高度机动性和方向机动性。
按航迹特点分为铅垂平面内,水平平面内和空间的机动飞行。
2)了解飞机敏捷性的基本概念和目前用来评价敏捷性的指标。
答:飞机的敏捷性是指飞机在空中迅速精确的改变机动飞行状态的能力。
选用状态变化和时间两个属性来衡量飞机敏捷性。
敏捷性按照时间尺度分为瞬态敏捷性,功能敏捷性和敏捷性潜力;按照飞机运动形式分为轴向敏捷性,纵向敏捷性和滚转敏捷性。
第四章掌握知识点如下:1)了解“方案飞行”和“飞行方案”的基本概念。
答:方案飞行是导弹按照某种固定的飞行程序飞行,用来攻击静止的或运动缓慢的目标,或将导弹及其他飞行器送到预定点。
飞行方案是设计弹道时所设定的某些运动参数随时间变化的规律。
1.单旋翼/尾桨式直升机各个操纵杆、舵控制什么操纵面?用以改变哪些空气动力?2.杆力梯度为什么不能过大或过小?3.共轴式直升机、纵列式直升机、倾转旋翼飞行器都没有尾桨,悬停时如何改变方向?1.黑鹰直升机的旋翼转向为顶视逆时转,问:●悬停时遇到迎面突风,旋翼如何倾倒?驾驶员为保持悬停,应如何操纵予以修正?●驾驶员的修正动作,使桨叶如何周期变距?2.作定速、定高及左、右转弯时,纵向操纵有何不同?3.无铰旋翼的桨叶有挥舞运动吗?1.刚体有6个自由度,研究或计算直升机机身的运动,只用六个主控方程为什么不行?2.指出线化小扰动方程中的哪些项反应了直升机纵横向运动的耦合?1.平衡计算的任务是什么?2.直升机飞行前要检查装载情况,保证重心位置在规定的范围内,为什么不许超出规定范围?3.有的直升机无尾斜梁,尾桨比旋翼低,有什么优缺点?4.Bell-412直升机为水面迫降应急放出了左、右浮筒,试比较浮筒放出前后,直升机的操纵量和姿态有何不同,假设左、右浮筒在直升机重心所在的横截面内。
5.直9直升机的涵道尾桨比旋翼低,正常悬停时的横向姿态向哪一侧倾斜?转入前飞后,随着速度的增加,为什么会自行逐渐改平?(注:直9的旋翼转向为顶视顺钟向)直9为什么需要有大垂尾及两片平尾端板?1.平尾安装角一般为负,如果安装成正角度,前飞状态能否提供正的空速稳定性?能否提供俯仰阻尼?2.挥舞铰偏置量的大小对直升机的空速稳定性、迎角稳定性、横向稳定性(上反效应)、航向稳定性各有什么影响?3.纵向悬停振荡和横向悬停振荡周期是否相同?4.共轴式直升机为什么多用双垂尾?5.如果直升机存在螺旋不稳定性,应采取什么改进措施?6.为什么直升机是前重心时纵向稳定性比后重心时好?1.直升机操纵响应带宽的物理含义是什么?2.下述两种情况下,直升机的垂直运动阻尼是否增大?垂直操纵灵敏度是否增大?达到稳态升降的时间是否缩短?●增大旋翼实度●增大旋翼转速3.直升机对总距操纵的响应是随时间单调变化的,而对驾驶杆或舵的响应都是振荡的,试分析其原因?1.“认定的”飞行品质等级是什么人、根据什么而给出的?“预估的”飞行品质等级是什么人、根据什么而给出的?为什么需要两种评定方法相结合来确定直升机的飞行品质?2.直升机的飞行品质分为哪几个等级?“认定”的品质等级和“预估”的品质等级各是如何得到的?。
飞机和大气的一般介绍单选1. 翼型的中弧曲度越大表明A:翼型的厚度越大B:翼型的上下表面外凸程度差别越大C:翼型外凸程度越大D:翼型的弯度越大B2. 低速飞机翼型前缘A:较尖B:较圆钝C:为楔形D:以上都不对B3. 关于机翼的剖面形状(翼型),下面说法正确的是A:上下翼面的弯度相同B:机翼上表面的弯度大于下表面的弯度C:机翼上表面的弯度小于下表面的弯度D:机翼上下表面的弯度不可比较B4. 国际标准大气规定的标准海平面气温是A:25℃B:10℃C:20℃D:15℃D5. 按照国际标准大气的规定,在高度低于11000米的高度上,高度每增加1000米,气温随季节变化A:降低6.5℃B:升高6.5℃C:降低2℃D:降低2℃A6. 在3000米的高度上的实际气温为10℃,则该高度层上的气温比标准大气规定的温度A:高12.5℃B:低5℃C:低25.5℃D:高14.5℃D7. 在气温比标准大气温度低的天气飞行,飞机的真实高度与气压高度表指示的高度(基准相同)相比,飞机的真实高度A:偏高B:偏低C:相等D:不确定B简答1. 请解释下列术语:(1)相对厚度(厚弦比)(2)相对弯度(中弧曲度)(3)展弦比(4)后掠角(1)翼型最大厚度与弦长的比值,用百分比表示;(2)最大弧高与翼弦的比值,用百分比表示;(3)机翼翼展与平均弦长的比值;(4)机翼四分之一弦线与机身纵轴垂直线之间的夹角。
2. 请叙述国际标准大气规定。
国际标准大气(International Standard Atmosphere),简称ISA,就是人为地规定一个不变的大气环境,包括大气压温度、密度、气压等随高度变化的关系,得出统一的数据,作为计算和试验飞机的统一标准。
国际标准大气由国际民航组织ICAO制定,它是以北半球中纬度地区大气物理特性的平均值为依据,加以适当修订而建立的。
3. 实际大气与国际标准大气如何换算?确定实际大气与国际标准大气的温度偏差,即ISA偏差,ISA偏差是指确定地点的实际温度与该处ISA标准温度的差值,常用于飞行活动中确定飞机性能的基本已知条件。