第三章 变分法基础 翟立强资料
- 格式:ppt
- 大小:415.00 KB
- 文档页数:18
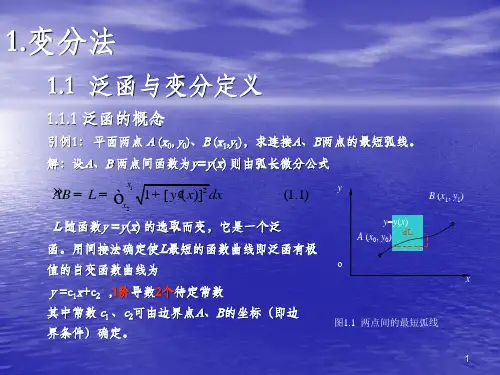
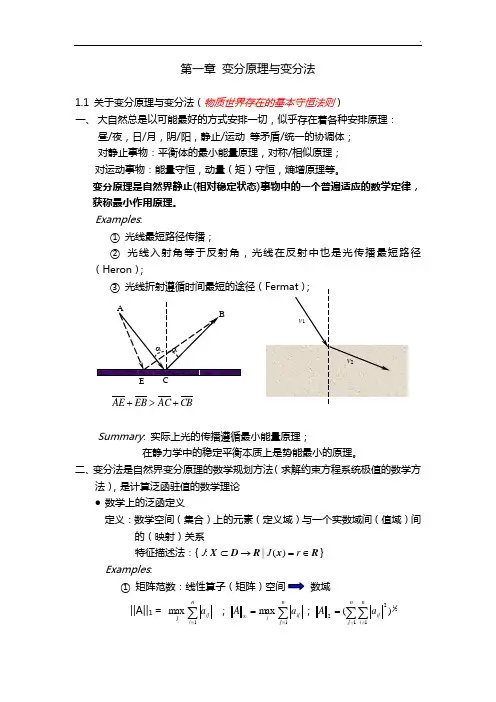
第一章 变分原理与变分法1.1 关于变分原理与变分法(物质世界存在的基本守恒法则)一、 大自然总是以可能最好的方式安排一切,似乎存在着各种安排原理:昼/夜,日/月,阴/阳,静止/运动 等矛盾/统一的协调体; 对静止事物:平衡体的最小能量原理,对称/相似原理;对运动事物:能量守恒,动量(矩)守恒,熵增原理等。
变分原理是自然界静止(相对稳定状态)事物中的一个普遍适应的数学定律,获称最小作用原理。
Examples :① 光线最短路径传播;② 光线入射角等于反射角,光线在反射中也是光传播最短路径(Heron );③CB AC EB AE +>+Summary : 实际上光的传播遵循最小能量原理;在静力学中的稳定平衡本质上是势能最小的原理。
二、变分法是自然界变分原理的数学规划方法(求解约束方程系统极值的数学方法),是计算泛函驻值的数学理论数学上的泛函定义定义:数学空间(集合)上的元素(定义域)与一个实数域间(值域)间的(映射)关系特征描述法:{ J :R x R D X ∈=→⊂r J )(|}Examples :① 矩阵范数:线性算子(矩阵)空间 数域‖A ‖1 = ∑=ni ij ja 1max ;∑=∞=nj ij ia A 1max;21)(1122∑∑===n j ni ij a A② 函数的积分: 函数空间数域 D ⊂=⎰n ba n f dxx f J )(Note : 泛函的自变量是集合中的元素(定义域);值域是实数域。
Discussion :① 判定下列那些是泛函:)(max x f f b x a <<=;x y x f ∂∂),(; 3x+5y=2; ⎰+∞∞-=-)()()(00x f dx x f x x δ ② 试举另一泛函例子。
物理问题中的泛函举例① 弹性地基梁的系统势能i. 梁的弯曲应变能: ⎰=∏l b dx dxw d EJ 0222)(21ii. 弹性地基贮存的能量: dx kw l f ⎰=∏0221 iii. 外力位能: ⎰-=∏l l qwdx 0iv. 系统总的势能:000;})({221222021===-+=∏⎰dxdww x dx qw kw dxw d EJ l泛函的提法:有一种梁的挠度函数(与载荷无关),就会有一个对应的系统势能。
变分原理基础罗建辉2009年夏季1 能量原理能量原理是以能量形式表述的力学定律。
概括地说,在所有满足一定的约束条件的可能状态中,真实状态应使其能量取极值或驻值。
本课程讨论结构力学、弹性力学、薄板的能量原理,只讨论线性平衡问题。
2 弹性系统真实平衡状态的能量特征举例从能量角度看,弹性系统的真实平衡状态具有如下的能量特征:即与其他可能状态相比,真实状态的能量为极值或驻值。
对这一能量特征举几个简例。
例0—1. 弹簧系统真实平衡状态的能量特征图0—1 所示为一弹簧下端挂一重物。
弹簧的刚度系数为k ,重物的重力为P 。
用∆表示位移,当弹簧系统处于平衡状态时,求得位移∆的真解为kP =∆=∆0)(真解 (1)真解的能量特征是弹簧系统的势能p ∏为极小。
现检验如下:∆-∆=∏P k p221 (2)式(2)右边第一项是弹簧的应变能,第二项是重力P 的势能。
系统势能p ∏是位移∆的二次式。
由式(2)得221()22pP Pk kk∏=∆--(3)现考察真解的能量特征。
显然,真解(1)使势能p ∏取极小值。
换一个角度,求p ∏的一阶及二阶导数,得Pk d d p-∆=∆∏ (4)22>=∆∏k d d p(5)将真解(1)代入式(4),得0=∆∏d d p,故知势能p∏为驻值。
根据式(5),又知势能p∏变分原理广义变分原理单变量形式多变量形式为极小值。
例0—2 超静定梁真实平衡状态的能量特征图0—2a 所示为一超静定梁,取图0—2b 所示静定梁为其基本结构。
根据平衡条件,基本结构的弯矩可表示为PMX M M +=11 (6)其中p M 是在荷载作用下基本结构的弯矩,1M 是在单位多余力11=X 作用下基本结构的弯矩,1X 是任意值。
式(6)同时也是超静定梁满足平衡条件的可能弯矩,由于1X 是任意参数,因此超静定梁的可能弯矩尚未唯一确定。
为了确定1X 的真解,还必须应用变形协调条件)(1111=∆+p X 真解δ (7)式中⎰=∆dxEI M M pp 11 (8)⎰=dxEIM 2111δ试验证真解的能量特征是梁的余能c ∏为极小值,余能c ∏的表示式为dxMX M EIdx EIMpc ⎰⎰+==∏2112)(212 (9)余能c ∏是1X 的二次函数,由式(9)得11111122211221212211112221111111111(2)21[2]21[2]21[()]2p c p p p p p p p p M X M M X M dxEIM dx M M dx M dx X X EIEI EIM dx X X EIM dx X EIδδδδ∏=++=++=+∆+=+∆-∆+⎰⎰⎰⎰⎰⎰(10)由式(10)可知变形协调条件(7)使余能c ∏取极小值。
摘要数学物理中的变分方法是把一个数学物理方程的定解问题归结为变分问题——求泛函的极值问题。
变分方法是解数学物理方程定解问题的常用方法。
变分原理描述微分方程定解问题与一定条件下泛函的极值问题之间存在着一种等价关系,从而可以通过求解相应泛函的极值问题(即变分问题)得到微分方程定解问题的解。
本文首先介绍了变分原理及其在边值问题中的应用,阐述了Dirichlet原理、正定对称算子的变分原理以及其它边值问题的变分原理;其次讨论的变分方法的基本问题;接着着重介绍了数学物理中常见的两种变分方法:Ritz方法和Galerkin方法及其在解本证值和边值问题中的应用;最后给出了其他一些变分近似方法:Kantorovich法、最速下降法、最小平方法及Courant法等。
关键词:变分方法;Dirichlet原理;Ritz方法;Kantorovich法AbstractV ariational methods in mathematical physics is due to the variational problem - seek the extremal of the functional definite solution of a mathematical physics equations. The variational method is commonly used method for solving mathematical physics EQUA TION. V ariational principle to describe the differential equation definite solution of the problem under certain conditions, functional extremal problem there is an equivalence relation, thus solving the problem of the extreme value of the corresponding functionals (ie, change of sub-issues) to get the differential equation given solution of the problem solution.This paper first introduces the application of the variational principle and its Boundary Problems on the Dirichlet principle, the variational principle of symmetric positive definite operator, and the other boundary value variational principle; followed by discussion of the variational method; then focuses on mathematical physics in two of the variational method: the Ritz method and Galerkin method and its application in the solution of the value of the card and Boundary V alue Problems; Finally, some other variational approximation methods: of Kantorovich method, the steepest descent method, the least squares method and the Courant law.Key words:variational methods; Dirichlet principle; Ritz method; Kantorovich method目录目录 (I)第1章概述 (1)第2章变分原理 (2)2.1膜平衡问题 (9)2.2 Dirichlet原理 (3)2.3正定对称算子的变分原理 (5)2.4其它边值问题的变分原理 (7)2.4.1 Neumaan问题的变分原理 (7)2.4.2 第三类边值问题的变分原理 (8)第3章变分方法的基本问题 (9)3.1 泛函与泛函极值的基本问题 (9)3.2 Euler-lagrange方程 (10)3.3 多个变量的变分问题 (11)3.4变端点问题和自然边界条件 (13)第4章常见的两种变分方法及其应用 (15)4.1 Ritz方法 (15)4.1.1 Ritz方法在本征值问题中的应用 (17)4.1.2 Ritz方法解边值问题 (20)4.2 Galerkin方法 (21)4.2.1 Galerkin方法解本征值问题 (22)4.2.2 Galerkin方法解非齐次边值问题 (24)第5章变分的其他近似方法 (26)5.1 Kantorovich法 (26)5.2 最速下降法 (27)5.3 最小平方法及Courant法 (29)5.4 有限元方法 (30)5.4.1 区域的剖分 (30)5.4.2 线性插值基函数 (31)5.4.3 有限元方程的形成 (33)5.4.4 求解有限元方程 (34)结论 (35)参考文献 (36)致谢 (37)第1章概述数学物理中的变分方法是把一个数学物理方程的定解问题归结为变分问题——求泛函的极值问题。
第七章 变分原理§1 泛函分析中的一些概念在变分原理及有限元等数值方法中,要涉及到泛函分析中的一些概念。
虽然有些概念在应用某些数值方法求解问题时,并非必需,但是掌握它们对于深入研究数值法的理论,阅读有关文献专著,却有很大的益处。
本节将根据需要,对某些概念作一简单介绍。
1.1 Hilbert 空间在引进Hilbert 空间的概念之前,我们先对线性空间等概念作一简单回顾。
1.线性空间定义1 设H 是某些元素的集合,K 是实数(或复数)域。
如果对H 中任何元素,x y ,定义了一种所谓“加法”运算x y +及a K ∈与x H ∈的“数乘”运算ax ,使x y +,ax 属于H ,且具有性质:(1)x y y x +=+;(2)()()x y z x y z ++=++;(3)存在所谓“零元素”,H θ∈使,x x x H θ+=∀∈;(4)对任何x H ∈,都有一个相应的“逆元素”x H -∈,使()x x θ+-=; (5)()(),,,x x K x H αβαβαβ=∈∈; (6)1,x x x H ⋅=∈;(7)(),,,x x x K x H αβαβαβ+=+∈∈; (8)(),,,x y x y K x y H αααα+=+∈∈; 则称H 是实数(或复数)域上的线性空间。
例1 定义在[,]a b 上的一切连续函数的全体记作C ;若对任意两个元素,f g C ∈,定义()()()(),()(),,[,]f g x f x g x x a bf x f x K xa b ααα+=+∈=∈∈则空间C 是实线性空间,记作[,]C a b 。
例2 考虑有限空间[,]a b (或区域Ω)上平方可积函数()f x ,即使2|()|b af x d x <∞⎰(或2|()|f x dx Ω<+∞⎰)(1.1) 成立的函数类,记作2[,]L a b (或2()L Ω),对于2,[,]f g L a b ∈,显然,a f f g +均属于2[,]L a b ,且满足性质(1)-(8),故2[,]L a b (或2()L Ω)可积是线性空间。
§1 变分法简介作为数学的一个分支,变分法的诞生,是现实世界许多现象不断探索的结果,人们可以追寻到这样一个轨迹:约翰·伯努利(Johann Bernoulli ,1667-1748)1696年向全欧洲数学家挑战,提出一个难题:“设在垂直平面内有任意两点,一个质点受地心引力的作用,自较高点下滑至较低点,不计摩擦,问沿着什么曲线下滑,时间最短?”这就是著名的“最速降线”问题(The Brachistochrone Problem )。
它的难处在于和普通的极大极小值求法不同,它是要求出一个未知函数(曲线),来满足所给的条件。
这问题的新颖和别出心裁引起了很大兴趣,罗比塔(Guillaume Francois Antonie de l'Hospital 1661-1704)、雅可比·伯努利(Jacob Bernoulli 1654-1705)、莱布尼茨(Gottfried Wilhelm Leibniz,1646-1716)和牛顿(Isaac Newton1642—1727)都得到了解答。
约翰的解法比较漂亮,而雅可布的解法虽然麻烦与费劲,却更为一般化。
后来欧拉(Euler Lonhard ,1707~1783)和拉格朗日(Lagrange, Joseph Louis ,1736-1813)发明了这一类问题的普遍解法,从而确立了数学的一个新分支——变分学。
有趣的是,在1690年约翰·伯努利的哥哥雅可比·伯努利曾提出著名的悬链线问题 (The Hanging Chain Problem)向数学界征求答案,即,固定项链的两端,在重力场中让它自然垂下,问项链的曲线方程是什么。
在大自然中,除了悬垂的项链外,我們还可以观察到吊桥上方的悬垂钢索,挂着水珠的蜘蛛网,以及两根电线杆之间所架设的电线,这些都是悬链线(catenary )。
伽利略(Galileo, 1564~1643)比贝努利更早注意到悬链线,他猜测悬链线是抛物线,从外表看的确象,但实际上不是。
优化理论课件(2)第二部分动态优化:变分法和最优控制理论变分法是处理动态优化的古典方法,现在较少使用,在蒋中一的书中,变分法的思路可用来解释庞特里亚金最大值原理(一阶条件)。
本部分内容主要来自蒋中一《动态最优化基础》。
目录一、什么是动态优化? (3)(一)动态优化问题的基本要素 (4)(二)泛函及其相关概念 (4)(三)可变终结点 (5)(四)横截条件 (6)(五)目标泛函 (6)二、变分法 (7)(一)基本问题:固定终结点问题 (7)(1)基本问题及其假定 (7)(2)一阶条件:欧拉方程 (8)(二)推广:多状态变量与高阶导数 (10)(1)多状态变量 (10)(2)高阶导数 (10)(三)可变端点问题 (10)(1)一般性横截条件 (11)(2)垂直终结线问题 (12)(3)水平终结线问题 (12)(4)终结曲线问题,即错误!不能通过编辑域代码创建对象。
(12)(5)截断的垂直终结线问题 (12)(6)截断的水平终结线问题 (13)(7)多变量和高阶导数情形 (13)(四)二阶条件(充分条件) (14)(1)固定端点问题的二阶条件及其二次型检验 (14)(2)凹凸性充分条件 (14)(3)变分 (15)(五)无限期界问题 (16)(1)收敛性 (16)(2)横截条件 (17)(3)充分条件 (17)(六)带约束的优化问题 (17)(1)等式约束 (17)(2)不等式约束 (18)(3)积分约束(等周问题) (19)三、最优控制理论 (20)(一)最优控制理论导论 (20)(二)最大值原理及其横截条件 (21)(1)最简单问题及最大值原理(一阶必要条件) (21)(2)最大值原理的理论基础及其横截条件 (23)(3)自控问题的汉密尔顿函数不变性 (26)(4)推广到多变量 (26)(三)最大值原理的经济学解释及现值的汉密尔顿函数 (27)(1)最大值原理的经济学解释 (27)(2)现值的汉密尔顿函数 (28)(四)充分条件(二阶条件) (29)(1)曼加萨林定理 (29)(2)阿罗条件 (31)(五)无限期界问题 (31)(1)横截条件与反例 (32)(2)作为充分条件一部分的横截条件 (32)(六)有约束的最优控制问题 (33)(1)涉及控制变量的约束 (33)(2)状态空间约束 (39)四、拉姆齐模型 (43)(一)相关理论发展背景 (43)(二)最简单的拉姆齐模型及其动力系统 (45)(三)微分方程定性稳定性判别方法简介 (47)(1)稳定性与渐进稳定性 (47)(2)稳定性判别基本定理 (48)(2)平面动力系统的奇点 (49)一、什么是动态优化?例:一个企业将原料从初始状态A通过五道工序,变为总结状态Z,每个阶段的选择对应一个阶段的成本,如何选择路径使得总成本最小化?从这个例子中可以看到:首先,动态强调的是时期之间的联系,而不仅仅是有时间的顺序;其次,这里也包含了Bellman方程的基本原理。