回转构件的动平衡
- 格式:pdf
- 大小:1.22 MB
- 文档页数:5
回转构件动平衡实验报告回转构件动平衡实验报告一、引言回转构件是一种常见的机械零件,广泛应用于各种机械设备中。
在实际应用中,回转构件的动平衡是确保其正常运行的重要因素之一。
本实验旨在通过回转构件动平衡实验,探究回转构件的动平衡原理和方法,并对实验结果进行分析和总结。
二、实验目的1.了解回转构件的动平衡原理和方法;2.学习使用动平衡仪器进行实验;3.掌握实验数据处理和分析方法。
三、实验装置和方法实验装置主要包括回转构件、动平衡仪器和相应的测量工具。
实验方法如下:1.将回转构件安装在动平衡仪器上,并调整好水平;2.启动动平衡仪器,进行初始测量,记录下回转构件的初始不平衡量;3.根据实验要求,在回转构件上添加适量的平衡块,再次进行测量;4.重复步骤3,直到回转构件的不平衡量达到规定范围。
四、实验结果和分析经过多次实验,我们得到了一系列实验数据。
将这些数据进行整理和分析,可以得到如下结论:1.回转构件的不平衡量与平衡块的质量和位置有关。
当平衡块质量适当,位置合理时,回转构件的不平衡量可以减小到规定范围内;2.不同类型的回转构件,其动平衡方法和要求也有所不同。
在实际应用中,需要根据具体情况选择合适的动平衡方法;3.动平衡仪器的准确性和稳定性对实验结果的影响较大。
因此,在实验过程中,需要注意仪器的使用和维护。
五、实验总结通过本次回转构件动平衡实验,我们对回转构件的动平衡原理和方法有了更深入的了解。
同时,我们也学会了使用动平衡仪器进行实验,并掌握了实验数据处理和分析方法。
这对我们今后的学习和工作都具有重要的意义。
六、存在的问题和改进措施在实验过程中,我们也遇到了一些问题,主要包括仪器使用不熟练、数据处理不准确等。
为了改进实验效果,我们可以采取以下措施:1.加强对动平衡仪器的使用培训,提高操作的熟练度;2.在实验过程中,严格按照操作规程进行,确保数据的准确性;3.加强团队合作,共同解决实验中的问题。
七、展望回转构件动平衡技术在机械领域有着广泛的应用前景。
实验8 回转构件的动平衡实验之二一、回转体产生不平衡的原因对于作定轴转动的构件,由于设计、制造、装配以及材质不均匀等原因,会使回转件结构不对称,也就是回转轴线与其中心主惯性轴线不重合,此时构件上各点所产生的惯性力可以合成为质心的惯性主矢和惯性主矩,这种现象称其为不平衡现象。
存在不平衡现象的回转构件运动过程中,会产生一种附加的动压力,该力会使整个机械产生周期性振动和噪声,此振动降低了工作精度和可靠性。
因此,必须采用平衡配重的方法,以减少乃至消除动压力,保证回转件的正常工作。
根据刚性转子的宽度b 和其直径D 的比值对不平衡现象分类:当刚性转子的宽径比2.0/<D b 时,可以认为其质量均集中在一个通过质心的垂直平面内。
对于这类刚性转子,可称作静平衡。
而当宽径比2.0/≥D b 时,由于转子的质量不能认为分布在同一个转动平面内,所以必须同时考虑其惯性力和惯性力所形成的惯性力矩的平衡,这时就需要对转子进行动平衡实验。
下面主要介绍回转体的动平衡实验。
二、实验目的1.巩固和验证刚性回转件动平衡理论和方法;2. 掌握动平衡机的基本工作原理及运用动平衡机进行平衡的调节方法;3.了解动平衡精度的基本概念。
三、实验内容及要求1.选定动平衡机转子的装载形式,确定两支撑平面的位置。
2.在已知动平衡的转子上面添加不平衡质量,测定不平衡质量的大小和相位。
开动动平衡机,测定转子的不平衡质量大小与相位与实际值进行比较。
四、实验设备及工具1.YYQ —160型硬支撑动平衡机; 2.天平;3.钻床;4.待平衡的转子; 5.不同质量的试件。
五、实验原理动平衡的基本原理就是利用动平衡机测出转子偏心质量的大小及位置,并在相应位置添加或在相对位置减小对应质量值,从而消除由此质量所产生的离心惯性力及惯性力偶矩,达到转子的运转平衡。
动平衡实验在专用的动平衡实验机上进行。
各种动平衡机的构造和工作原理不尽相同,但其作用都是用来确定在两个平衡平面中需加的平衡质量的大小和方位。
实验7 回转构件动平衡实验回转构件动平衡是现代机械的一个重要问题,尤其是高速机械在运转时,所产生的不平衡惯性力将在运动副中引起附加的动压力,这不仅会增大运动副中的摩擦和构件中的内应力,也会降低机械效率和使用寿命。
因此,掌握回转构件动平衡的原理和方法具有特别重要的意义。
一、 实验目的巩固回转构件动平衡的基本概念,熟悉补偿式动平衡机的基本工作原理及操作方法。
二、 设备和工具框架式动平衡机;试件-转子;平衡重量;普通天平;卡尺;钢尺。
三、 原理和方法理论上已阐明,任何回转构件的动平衡,都可以认为是分别处于两个任意选定的回转平面T '和T ''内的不平衡重量0G '和0G ''所产生。
因此进行平衡实验时,便可以不管被平衡构件的实际不平衡重量所在平面及其大小如何,只需要根据构件实际外形的许可选择两回转平面作为平衡效正平面,且把不平衡重量看作处于该平面之中的0G '和0G ''。
然后针对0G '和0G ''进行平衡就可以达到目的。
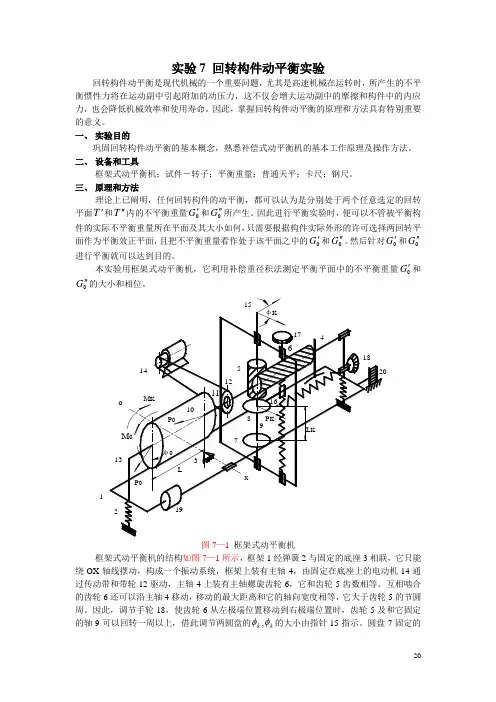
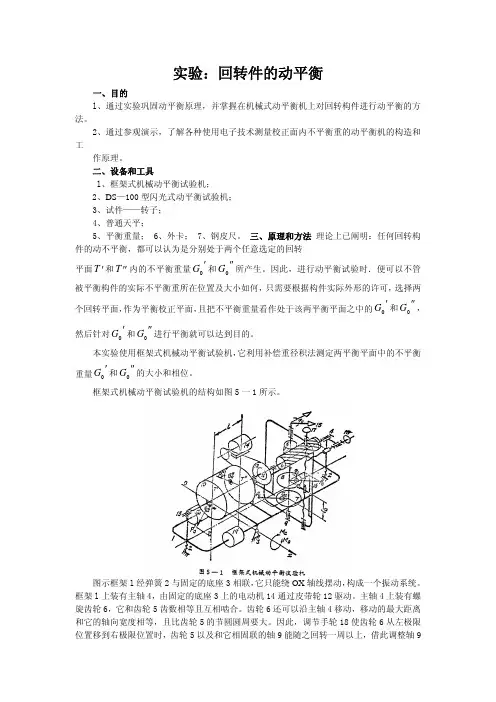
本实验用框架式动平衡机,它利用补偿重径积法测定平衡平面中的不平衡重量0G '和0G ''的大小和相位。
图7—1 框架式动平衡机框架式动平衡机的结构如图7—1所示,框架1经弹簧2与固定的底座3相联,它只能绕OX 轴线摆动,构成一个振动系统,框架上装有主轴4,由固定在底座上的电动机14通过传动带和带轮12驱动,主轴4上装有主轴螺旋齿轮6,它和齿轮5齿数相等。
互相啮合的齿轮6还可以沿主轴4移动,移动的最大距离和它的轴向宽度相等,它大于齿轮5的节圆周。
因此,调节手轮18,使齿轮6从左极端位置移动到右极端位置时,齿轮5及和它固定的轴9可以回转一周以上,借此调节两圆盘的k φ,k φ的大小由指针15指示。
圆盘7固定的1轴9上,通过调节手轮17可以使圆盘8沿轴9上下移动,以调节两圆盘距离k l ,k l 由指针16指示。
回转体的动平衡(机械原理)回转体的动平衡是指在旋转时,使回转体的重心与转轴重合,旋转轴线不会发生晃动的过程。
动平衡对于回转体的稳定性和运行效率起着关键的作用。
因此,在机械设计和生产过程中,我们必须考虑如何实现回转体的动平衡。
1.回转体的稳定性分析回转体的稳定性是指在旋转过程中,所需要的力矩达到平衡的状态。
我们可以用扭矩的概念来描述其稳定性。
扭矩是指在回转体的一个轴上作用的旋转力矩。
在回转体不平衡的情况下,因为重心偏离转轴,所以会产生一个旋转力矩。
而这个力矩会使回转体围绕转轴旋转,导致旋转过程中发生晃动。
如果扭矩的大小超过回转体的惯性矩,则回转体就会失去稳定性。
因此,我们需要通过调节回转体的结构或增加平衡配重等方式,来降低旋转过程中的动态不平衡。
2.解决方案(1)静平衡静平衡是指回转体不旋转情况下的平衡状态。
在静态平衡时,我们仅考虑回转体各部分重量的平衡。
可以通过增加平衡配重等方式,将剩余不平衡分布在不同的位置上。
在设计过程中,我们可以利用有限元分析软件进行模拟,确定平衡配重的位置和数量。
对于一些大型机械,我们还可以进行试重实验,通过对加入不同位置调整重量的回转体进行测试,找出合适的平衡点。
动平衡是指回转体在旋转情况下的平衡状态。
它是通过旋转平衡技术来实现的。
旋转平衡技术可以精确地测量回转体的不平衡,并根据测量结果进行动态平衡。
在动平衡的过程中,我们需要先对回转体进行低速旋转测试,测量不平衡力和相位。
根据测量结果,我们可以计算出平衡配重的量和位置。
然后,我们会将平衡配重加到回转体上,再进行高速测试,直到回转体的扭矩达到平衡状态。
对于一些高精度、高速运转的回转体,如旋转光器等,静平衡往往无法满足要求。
这时候就需要采用动平衡技术,才能获得稳定的运行效果。
3.结论在机械设计和生产中,实现回转体的动平衡至关重要。
只有通过静平衡和动平衡技术的应用,我们才能确保回转体的稳定性和运行效率。
因此,在机械设计中,我们务必要充分考虑回转体稳定性的问题,选择合适的平衡技术来保证机械产品的质量和可靠性。
机械设计基础之回转构件的平衡回转构件是机械设计中常见的一种构件类型,它具有旋转运动的特点。
在机械设计中,回转构件的平衡是一个十分重要的问题。
平衡是指在回转构件旋转运动过程中,构件各部分的质量分布均匀,使得构件在高速旋转时不会产生过大的离心力和不平衡力,从而保证机械的正常运行和使用寿命。
1. 平衡的基本原理回转构件的平衡主要是通过调整构件的质量分布来实现的。
平衡要求构件质量的中心轴线与构件旋转轴线重合,以保持构件的稳定。
平衡可分为静平衡和动平衡两种情况。
•静平衡:在静止条件下,构件的重心要与轴线保持对称分布。
这时,构件旋转时只会产生离心力,不会产生不平衡力。
静平衡是最基本的平衡要求。
•动平衡:在运动状态下,构件的质量分布要满足一定的条件。
除了重心与轴线保持对称分布外,构件其他部分的质量分布也要满足一定的规律。
这样可以减小构件在高速旋转时产生的不平衡力,提高机械的使用寿命。
2. 平衡的方法和措施2.1 质量补偿法质量补偿法是最常用的平衡方法之一。
它通过在回转构件上增加或减少质量,来实现平衡。
有两种常见的质量补偿方法:质量块法和钻孔法。
•质量块法:在构件上增加质量块来实现平衡。
质量块的大小和位置应根据构件具体情况进行合理选择。
在计算时,通常使用静平衡方程来确定质量块的质量和位置,使得构件满足平衡条件。
质量块的安装一般采用焊接、螺栓等方式固定在构件上。
•钻孔法:在构件上钻孔来减小构件的质量,从而实现平衡。
钻孔的位置和直径应根据构件的质量分布情况和平衡要求来确定。
在计算时,通常使用动平衡方程来确定钻孔的直径和位置,使得构件满足平衡条件。
钻孔后,需要对构件进行动平衡试验,进一步进行微调。
2.2 弹簧平衡法弹簧平衡法是一种自调整的平衡方法。
它通过在回转构件上安装弹簧,使得构件在旋转时,弹簧可以自动调节和补偿不平衡力。
弹簧平衡法的优点是简单易行,不需要对构件进行大幅度改动。
弹簧平衡法的基本原理是利用弹性形变,将构件的不平衡力转化为弹簧的伸缩变形。
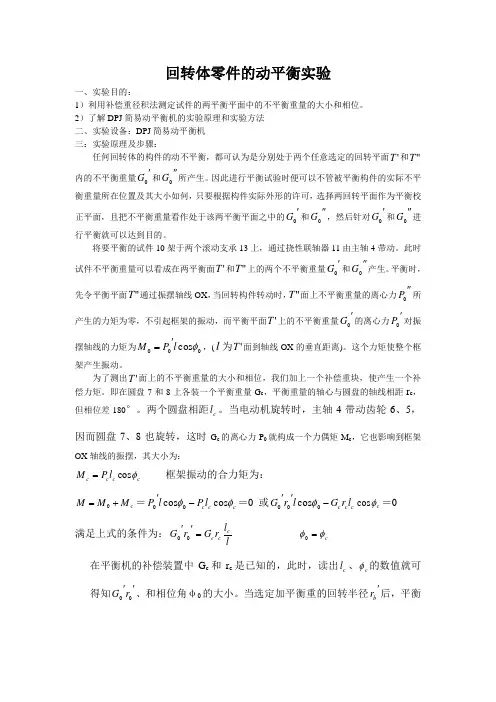
回转体零件的动平衡实验一、实验目的:1)利用补偿重径积法测定试件的两平衡平面中的不平衡重量的大小和相位。
2)了解DPJ 简易动平衡机的实验原理和实验方法 二、实验设备:DPJ 简易动平衡机 三:实验原理及步骤:任何回转体的构件的动不平衡,都可认为是分别处于两个任意选定的回转平面'T 和"T 内的不平衡重量'0G 和"0G 所产生。
因此进行平衡试验时便可以不管被平衡构件的实际不平衡重量所在位置及其大小如何,只要根据构件实际外形的许可,选择两回转平面作为平衡校正平面,且把不平衡重量看作处于该两平衡平面之中的'0G 和"0G ,然后针对'0G 和"0G 进行平衡就可以达到目的。
将要平衡的试件10架于两个滚动支承13上,通过挠性联轴器11由主轴4带动。
此时试件不平衡重量可以看成在两平衡面'T 和"T 上的两个不平衡重量'0G 和"0G 产生。
平衡时,先令平衡平面"T 通过振摆轴线OX ,当回转构件转动时,"T 面上不平衡重量的离心力"0P 所产生的力矩为零,不引起框架的振动,而平衡平面'T 上的不平衡重量'0G 的离心力'0P 对振摆轴线的力矩为000cos φl P M'=,(l为'T 面到轴线OX 的垂直距离)。
这个力矩使整个框架产生振动。
为了测出'T 面上的不平衡重量的大小和相位,我们加上一个补偿重块,使产生一个补偿力矩。
即在圆盘7和8上各装一个平衡重量G c ,平衡重量的轴心与圆盘的轴线相距r c ,但相位差180°。
两个圆盘相距cl 。
当电动机旋转时,主轴4带动齿轮6、5,因而圆盘7、8也旋转,这时G c 的离心力P 0就构成一个力偶矩M c ,它也影响到框架OX 轴线的振摆,其大小为:cc c cl P Mφcos = 框架振动的合力矩为:c MMM +=0=c c c l P l P φφcos cos 00-'=0 或c c c l r G l r G -''000cos φcφcos =0满足上式的条件为:ll r G r G cc c =''00φφ=0在平衡机的补偿装置中G c 和r c 是已知的,此时,读出c l 、c φ的数值就可得知''00r G 、和相位角φ0的大小。
机械工程课内实验实验指导书回转构件动平衡实验桂亮金悦西安交通大学机械基础实验教学中心2014年4月目录一、实验目的 (2)二、实验设备和工具 (2)三、实验台结构与工作原理 (2)四、实验步骤及注意事项 (8)一、实验目的1.加深对转子动平衡概念的理解。
2.了解动平衡实验台的结构及工作原理3.了解并掌握刚性转子动平衡的原理及基本方法。
二、实验设备和工具1.CDJY-3型机械共振式动平衡机、QM-JDH-B型动平衡实验台2.刚性转子试件3.平衡块或橡皮泥4.天平三、实验台结构与工作原理(一)CDJY-3机械共振式动平衡机1.实验台结构CDJY-3共振式动平衡机的结构如图1所示,其中实验转子与框架组成绕轴O-O摆动的振子,振子与弹簧组成一个振动系统,其振幅可用百分表测得,在转子运转之前偏心轮用来支撑框架。
图1 CDJY-3共振式动平衡机示意图1—实验转子;2—弹簧;3—支点;4—百分表;5—偏心轮;6—振动框架2.实验原理由动平衡原理知,任一回转构件上诸多不平衡质量,都可以用分别处于两个任选平面I-I、II-II内,回转半径分别为rⅠ与rⅡ的两个不平衡质量QⅠ与QⅡ来等效,只要使这两个等效不平衡质量得到平衡,则该转子达到动平衡,即相应地加上(或减去)不平衡质量。
当把转子放在框架上回转时,两等效不平衡质量分别产生两等效离心惯性力PⅠ与PⅡ,在力矩PⅠL的作用下引起振动系统的受迫振动,因PⅡ在过O-O轴的平面II-II内,故不影响绕O-O轴的振动,当转子的角频率接近系统的自振频率时,系统出现共振,这时振幅最大,如图2所示。
由微振原理得知:共振振幅与干扰力的幅值成正比即:L r gQ A K I I I 2ω∝ 式中:ωK 为共振时转子的角速度,即振动系统的自振角频率。
对一定的振动系统,它是个定值,g 与L 亦是定值,故上式可表达为:I I I r Q A μ=式中:µ为比例系数。
A I 的大小可以由动平衡机上百分表读得,为求出不平衡重量QI 的大小与方位,用二次转位法求得。
实验三回转构件的动平衡一、一、实验目的:1、验证动平衡的理论知识;2、了解动平衡机的工作原理;3、掌握进行回转构件动平衡的基本测试方法。
二、实验装置和工具:1、动平衡试验机2、试件、配重、天平。
三、实验原理:回转零件由于质量分布不均,使其质心与回转中心不重合,而产生离心惯性力系不平衡,因而使构件在运转中产生振动。
回转构件的振动加速轴承的磨损和疲劳,影响机械的工作精度,产生噪声,并降低机械的寿命,严重时会遭到破坏。
因此,消除离心惯性力的影响,便是机械平衡的目的。
而回转构件(转子)的不平衡程度,可以通过测量其支承或转子本身的振动得到,在与转子轴线相垂直的任意两个校正平面内加上或减去适当的重量来达到动平衡,这是刚性转子动平衡的原理。
根据这一原理,配用不同的显示仪表,动平衡机则能够用不同的测量方法正确地指示出被校验转子校正平面内动不平衡量的大小(即振幅)和动不平衡的位置(即相位)。
转子的动平衡有两种基本方法:一是把转子放在动平衡机上平衡,然后再安装运转。
另一种是现场平衡,即转子在工作状态下进行平衡。
具体采用哪种方法,视情况决定。
RYS-5A 型动平衡机系闪光式软支承卧式动平衡机。
该机由床身、摆架系统、传感器、驱动传动系统和电测装置五部分组成。
.用电磁式传感器作为换能器,用闪光灯照射旋转工件可以停像的原理来测定工件的不平衡位置,电表指示不平衡量的大小。
转子的转动由电动机经皮带轮输入,转子支架由弹簧片悬吊,构成一摆架式弹性振动系统,当转子转动时,由于不平衡质量会产生离心惯性力。
该惯性力的垂直分力使转子更紧地压在V形轴瓦上,而水平分力则使摆架作径向来回摆动,摆动的振幅按正弦规律变化,振幅与转子的偏心成正比,其频率为转子的旋转频率。
当摆架来回摆动时,带动电磁式传感器的线圈在永久磁场中作来回往复运动,切割磁力线,从而产生感应电动势,该电动势按正弦规律变化,由电磁式传感器转换成电讯号,送入电测箱进行测量。
.测量讯号输出至电表(微安表)及光电管。
实验7 回转构件动平衡实验回转构件动平衡是现代机械的一个重要问题,尤其是高速机械在运转时,所产生的不平衡惯性力将在运动副中引起附加的动压力,这不仅会增大运动副中的摩擦和构件中的内应力,也会降低机械效率和使用寿命。
因此,掌握回转构件动平衡的原理和方法具有特别重要的意义。
一、 实验目的巩固回转构件动平衡的基本概念,熟悉补偿式动平衡机的基本工作原理及操作方法。
二、 设备和工具框架式动平衡机;试件-转子;平衡重量;普通天平;卡尺;钢尺。
三、 原理和方法理论上已阐明,任何回转构件的动平衡,都可以认为是分别处于两个任意选定的回转平面T '和T ''内的不平衡重量0G '和0G ''所产生。
因此进行平衡实验时,便可以不管被平衡构件的实际不平衡重量所在平面及其大小如何,只需要根据构件实际外形的许可选择两回转平面作为平衡效正平面,且把不平衡重量看作处于该平面之中的0G '和0G ''。
然后针对0G '和0G ''进行平衡就可以达到目的。
本实验用框架式动平衡机,它利用补偿重径积法测定平衡平面中的不平衡重量0G '和0G ''的大小和相位。
图7—1 框架式动平衡机框架式动平衡机的结构如图7—1所示,框架1经弹簧2与固定的底座3相联,它只能绕OX 轴线摆动,构成一个振动系统,框架上装有主轴4,由固定在底座上的电动机14通过传动带和带轮12驱动,主轴4上装有主轴螺旋齿轮6,它和齿轮5齿数相等。
互相啮合的齿轮6还可以沿主轴4移动,移动的最大距离和它的轴向宽度相等,它大于齿轮5的节圆周。
因此,调节手轮18,使齿轮6从左极端位置移动到右极端位置时,齿轮5及和它固定的轴9可以回转一周以上,借此调节两圆盘的k φ,k φ的大小由指针15指示。
圆盘7固定的1轴9上,通过调节手轮17可以使圆盘8沿轴9上下移动,以调节两圆盘距离k l ,k l 由指针16指示。
回转构件的动平衡实验回转构件的动平衡实验是机械动力学实验中十分重要的一项。
它主要是为了探究旋转轴承在不平衡的情况下在转动过程中产生的共振和不稳定性,从而研究其动平衡问题。
实验装置通常由实验台、驱动电机、不平衡质量、转动轴承、振动传感器等组成,其中前三个是实验的重点装置。
实验台实验台是支撑整个实验装置的基础设施,通常由阻尼材料制成,可以有效地减小振动干扰,保证实验的精度和可靠性。
驱动电机驱动电机是实验的核心装置,主要用于产生旋转力,让轴承以一定的转速旋转。
在实验中,通常使用万能电机,它具有结构简单、鲁棒性强、输出稳定等特点,能够满足实验要求。
不平衡质量不平衡质量是实验中最关键的装置,它是在轴承上添加的一些质量块,旨在制造轴承在旋转过程中的不平衡现象。
不平衡质量的大小和位置的调整直接影响到实验的效果和结果。
因此,在实验中,需要认真测量不平衡质量的位置和大小,在实验过程中随时调整,确保实验的准确性。
转动轴承转动轴承是实验中承载不平衡质量的装置。
虽然它的种类有很多,但在实验中,通常使用的轴承由滚动轴承和双向承载球轴承。
其中,双向承载球轴承具有承载能力大、旋转稳定、自动调心等特点,适用于高速旋转的情况下,近年来得到越来越多的应用。
振动传感器振动传感器是实验中检测轴承的振动情况和不平衡程度的关键装置。
它主要测量轴承周围的振动情况,并将结果输出给振动分析器进行分析。
振动传感器种类繁多,根据不同实验条件的需要,可选用激光传感器、加速度传感器和光电传感器等不同类型的传感器。
通过以上装置的组合运作,可以进行回转构件的动平衡实验。
具体步骤如下:1、在实验台上安装驱动电机和转动轴承,注意将传感器固定在轴承周围,以便进行振动信号的采集和记录。
2、根据实验需求,选用适当的不平衡质量和加在轴承上,注意不平衡质量的位置和大小的初始设置,确保实验的初始状态正确无误。
3、启动驱动电机,使轴承沿着设定转速匀速旋转,开始进行实验。
同时,将振动传感器与振动分析器进行连接,对振动信号的振幅和频率进行监测和记录。
.机械设计基础之回转构件的平衡-----------------------作者:-----------------------日期:.DOC资料..DOC资料.教案用纸附页.DOC资料.教案用纸附页.DOC资料..DOC资料.教学容、方法和过程附记在两配重平面处,分别悬浮支承,逐端调平衡。
3、硬支承动平衡试验机的工作原理采用压力传感器将转子振动的加速度放大显示,并根据显示的情况,在两配重的平面添加重径积,直到震动消除的方法来实现动平衡。
四、作业布置教材 P108~P109 7-1、7-3、7-2、7-5.DOC资料..DOC资料.教 学 容、方 法 和 过 程附 记3.轴上零件的周向固定表8-3 轴上零件的轴向固定方法及应用4.轴的结构工艺性教案用纸附页.DOC资料..DOC资料.表8-4零件倒圆与倒角(摘自GB6403.8—86)5.提高轴的强度的措施 (1)改善轴的受载情况为了减小轴所承受的弯矩,传 动件应尽量靠近轴承,并尽可能不 采用悬臂的支撑形式,力求缩短支 撑跨距及悬臂长度。
教 案 用 纸 附 页图8-5 导向圆锥图8-6 砂轮越程图8-7 螺纹退刀槽图8-8 轴上零件的合理布置 图8-9 轴上零件的合理设计.DOC 资料.教 学 容、方 法 和 过 程附 记(2)减少应力集中的措施为了减少直径突变处的应力集中,提高轴的疲劳强度,应适当增大轴肩处的圆角半径。
图8-10 减小轴肩应力集中的措施图8-11 减小过盈配合处应力集中的措施三、 最小轴径的确定1.计算法按转矩初步计算轴端直径的 强度条件是:2.经验法对于与电机轴联接的轴,可取轴径,d 电为电机伸出轴的轴端直径。
四、作业布置教材 P121 8-2、8-3、8-4图8-12 键槽加工 []30.2T d ττ=≤[][]333339550100.20.2T P P An n ττ⨯=⨯=≥d (0.8~1.0)d d =电教案用纸附页教学容、方法和过程附记轴的结构主要与下列因素有关:①载荷的性质、大小、方向及分布情况;②轴上零件的数目和布置情况;③零件在轴上的定位及固定方法;④轴承的类型及尺寸;⑤轴的加工工艺及装配方法等。
回转件动平衡实验报告回转件动平衡实验报告摘要本实验旨在了解和掌握回转件的动平衡实验方法。
在实验过程中,我们使用平衡机对转子进行了动平衡测试,并通过调整配重的方式使得转子的振动幅值降低到一个可接受的范围内。
实验结果表明,通过合理的配重调整,可以有效地控制机械部件的振动,提升机械设备的运行性能和使用寿命。
关键词:回转件、动平衡、配重、振动幅值引言随着工业化的发展和机械制造技术的不断进步,大量的机械设备被广泛应用于各个领域,例如航空航天、汽车制造、电子通讯等。
而这些机械设备中,往往需要使用到大量的回转件,例如轴承、飞轮、齿轮等。
由于这些回转件的制造精度有限,以及装配、使用过程中的误差等原因,往往会产生一定的不平衡和振动。
这不仅会影响到机械设备的运行效率和使用寿命,还会对工作环境和操作员的安全产生潜在威胁。
如何有效地控制回转件的不平衡和振动,成为了机械制造领域的重要研究方向之一。
实验原理动平衡是指在回转件运转时,通过在回转件上加上适当的配重,使得回转件的质心与转轴的轴线重合,从而达到减小振动幅值的目的。
回转件的动平衡实验通常采用平衡机进行测试。
平衡机是一种专门用于测定机械回转件平衡质量的装置,可用于测定旋转机件、转子、发动机涡轮等的不平衡程度,以及调整配重位置进行动平衡校正。
其主要原理是通过测量回转件在高速旋转过程中产生的离心力和惯性力,来判断回转件的不平衡状态,并通过调整配重的方式进行校正。
实验步骤1. 将平衡机上的传感器调试至零点,使其可以测量回转件在高速旋转过程中所产生的振动幅值;2. 将待测试的转子安装于平衡机上,并将其适当加固;3. 将平衡机带动装置启动,使转子高速旋转,记录其振动幅值;4. 根据记录的振动幅值和方向,利用平衡钳和小型配重对转子进行校正;5. 重复步骤3和步骤4,直到转子的振动幅值降低至最小。
实验结果在本次实验中,我们测试了一台直径为400mm的转子。
通过实验测量,得到转子在高速旋转时,其振动幅值为4.18mm。
回转构件动平衡的条件
你看啊,我之前见过一个老师傅摆弄那些个回转构件,那老师傅啊,瘦瘦小小的,眼睛可亮了,透着一股精明劲儿。
他就蹲在那一堆构件旁边,周围都是些工具啊,零件啊,乱哄哄的,可他就跟置身于一个只有他和那些构件的小世界一样。
我就凑上去问他,我说:“老师傅,这回转构件动平衡到底咋回事儿啊?”他白了我一眼,好像嫌我问了个特傻的问题,但是呢,他还是开口了。
他说啊:“这动平衡啊,首先得惯性力平衡。
就好比你挑着两桶水走路,这两桶水得一样重,你走起来才不会歪歪扭扭的。
”他边说边拿手比划着,那手上全是机油,黑乎乎的。
我就又问他:“老师傅,就这么简单?”他一听我这话,立马就急眼了,眼睛瞪得老大,像个铜铃似的,说:“简单?你可别小看了这事儿。
这回转构件啊,它不光是惯性力平衡,还得惯性力矩平衡呢。
这就好比你挑着水,还得让扁担两边的力分布均匀,不然扁担就会打转儿,这构件也一样啊,转起来的时候,各个部分都得配合得恰到好处。
”
我听了老师傅的话,似懂非懂的。
就又仔细看他摆弄那些构件。
他一会儿拿个小锤子这儿敲敲,那儿打打,一会儿又拿着个仪器在那儿测量。
那表情严肃得很,就像在对待一件稀世珍宝。
我在旁边都不敢大声喘气,生怕打扰了他。
你想啊,这回转构件要是不平衡,那转起来可就乱套了。
就像一个喝多了酒的人,东倒西歪的,还指不定啥时候就倒了呢。
这构件要是在机器里这么乱转,那机器不得报废啊。
所以说啊,这动平衡的条件,那可是一点儿都不能马虎。
这就跟做人似的,你得各个方面都平衡好了,心里头的事儿也得捋顺了,才能稳稳当当的往前走,你说是不是这个理儿?。