北京交通大学交通规划原理课件第6章_交通的分布
- 格式:pdf
- 大小:843.54 KB
- 文档页数:97



第六章交通的分布交通的分布预测是交通规划四阶段预测模型的第二步,是把交通的发生与吸引量预测获得的各小区的出行量转换成小区之间的空间OD 量,即OD 矩阵。
因此,本章讲述交通规划中分布交通量预测的基本概念、理论模型及其应用,主要包括增长系数法和重力模型的原理、模型结构、算法、参数标定,以及介入机会模型和最大熵模型的概要等。
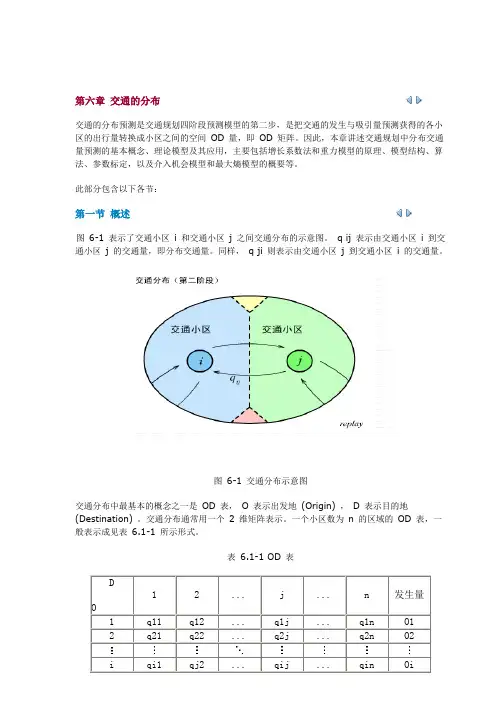
此部分包含以下各节:第一节概述图6-1 表示了交通小区i 和交通小区j 之间交通分布的示意图。
q ij 表示由交通小区i 到交通小区j 的交通量,即分布交通量。
同样,q ji 则表示由交通小区j 到交通小区i 的交通量。
图6-1 交通分布示意图交通分布中最基本的概念之一是OD 表,O 表示出发地(Origin) ,D 表示目的地(Destination) 。
交通分布通常用一个2 维矩阵表示。
一个小区数为n 的区域的OD 表,一般表示成见表6.1-1 所示形式。
表 6.1-1 OD 表D1 2 ... j ... n 发生量O1 q11 q12 ... q1j ... q1n O12 q21 q22 ... q2j ... q2n O2i qi1 qj2 ... qij ... qin Oin qn1 qn2 ... qnj ... qnn Oj 吸引量D1 D2 ... Dj ... Dn T表中,qij为以小区i 为起点,小区j 为终点的交通量;Oi为小区i 的发生交通量;Dj为小区j 的吸引交通量;T为研究对象区域的生成交通量。
对此OD 表,下面各式所示守恒法则成立:(6.1-1)分布交通量预测要解决的问题是在目标年各交通小区的发生与吸引交通量一定的条件下,求出各交通小区之间将来的OD 交通量。
求得的OD 交通量也是一个2 维OD 表,也同样要满足公式(6.1-1) 的约束条件。
分布交通量预测是交通规划的主要步骤之一,是交通设施规划和交通政策立案不可缺少的资料。
分布交通量的预测方法一般可以分为两类,一类是增长系数法,一类是综合法。