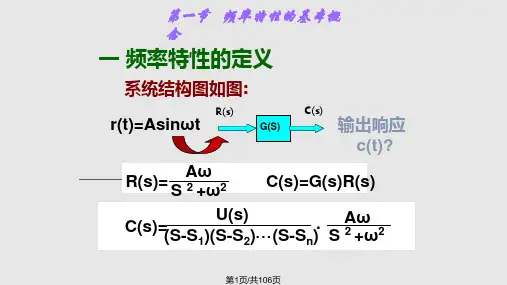
自动控制原理 ghx第六章频率特性分析法(四)
- 格式:pptx
- 大小:2.91 MB
- 文档页数:39

自动控制原理第六章课后习题答案(免费)线性定常系统的综合6-1 已知系统状态方程为:()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3.解: 由()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=可得:(1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为:32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+-(2) 根据给定的极点值,得期望特征多项式:*32()(1)(2)(3)6116f λλλλλλλ=+++=+++(3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k ===即:()408K =6-2 有系统:()2100111,0x x u y x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= (1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。
解(1) 模拟结构图如下:(2) 判断系统的能控性;0111c U ⎡⎤=⎢⎥-⎣⎦满秩,系统完全能控,可以任意配置极点。
(3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为:()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式:*2()(3)(3)69f λλλλλ=++=++比较()f λ与*()f λ各对应项系数,可解得:011,3k k ==即:[1,3]K =6-3 设系统的传递函数为:(1)(2)(1)(2)(3)s s s s s -++-+试问可否用状态反馈将其传递函数变成:1(2)(3)s s s -++若能,试求状态反馈阵,并画出系统结构图。