第四章5系统频率特性及稳定性
- 格式:ppt
- 大小:1.41 MB
- 文档页数:23
第四章控制系统的频域分析法 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 165 频率特性法本章是通过对系统的频率特性研究分析自动控制系统,是一种经典方法。
问题:什么是频率特性,如何描述?如何利用频率特性分析控制系统?5.1 频率特性5.1.1频率特性的基本概念我们知道,系统(包括开环系统和闭环系统)对正弦输入信号的稳态反应是用以描述系统性能的一种广泛应用的工程方法。
频率特性描述了系统在正弦输入信号作用下,其输出信号与输入信号之间的关系。
设系统的传递函数为又设其中:的振幅为常值:正弦函数的角频率有一般地A(s),B(s)为s的多项式;为的极点,包括实数和共扼复数对稳定的系统而言均具有负实部。
(设系统无重极点)其中,待定,是的共扼复数,为待定系数。
由拉氏反变换可得:则输出信号的稳态分量:(对于稳定的系统具有负实部)注:如果系统中含有k个重极点,则在中将会出现象(j=0,1,2,……,k-1)这样一些项,然而对于稳定的系统来说,由于具有负实部,所以各项都将随着趋于无穷大而趋于零。
因此具有重极点的稳定系统的稳态分量具有和上式相同的形式。
可按下式计算:(由留数公式)及其中为一复数,可表示为其中,模幅角同样可以证明,是的偶函数是的奇函数证明:设式中则有是的偶函数是的奇函数稳定的线性定常系统在正弦输入下的稳态响应为:可见:线性定常系统在正弦信作用下的稳态响应仍是与输入信号同频率的正弦信号。
其振幅是输入信号振幅R的倍,在相位上,正弦输出相对于输入的相移,同样是的函数,对确定的来说,振幅C及相移将是确定的。
综上:在正弦输入信号的作用下,线性定常系统的输出信号的稳态分量是和正弦输入信号同频率的正弦函数,其振幅C与输入正弦的振幅R 的比值C/R=是角频率的函数。
它描述系统对不同频率的输入信号在稳态情况下的衰减(或放大)特性,定义这种振幅比依赖于频率的函数为系统的幅频特性。
相对于输入信号r(t)的相移也是的函数,是系统输出信号的稳态分量对正弦输入信号r(t)的相移为该系统的相频特性,它描述系统的稳态输出对不同频率的正弦输入信号在相位上产生相角滞后或相角超前的特性。
第四章 频率特性分析4.1 什么是频率特性?解 对于线性定常系统,若输入为谐波函数,则其稳态输出一定是同频率的谐波函数,将输出的幅值与输入的幅值之比定义为系统的幅频特性;将输出的相位于输入的相位之差定义为系统的相频特性。
将系统的幅频特性和相频特性统称为系统的频率特性。
4.2 什么叫机械系统的动柔度,动刚度和静刚度?解 若机械系统的输入为力,输出为位移(变形),则机械系统的频率特性就是机械系统的动柔度;机械系统的频率特性的倒数就是机械系统的动刚度;当0=w 时,系统频率特性的倒数为系统的静刚度。
4.3已知机械系统在输入力作用下变形的传递函数为 12+s (mm/kg),求系统的动刚度,动柔度和静刚度。
解 根据动刚度和动柔度的定义有 动柔度()()()12+====jw jw s s G jw G jw λ mm/kg 动刚度 )(jw K =)(1jw G =21+jw kg/mm 静刚度 ()()5.0021010==+====K w jw w jw G w jw kg/mm4.4若系统输入为不同频率w 的正弦函数Asinwt,其稳态输出相应为Bsin(wt+ϕ).求该系统的频率特性。
解:由频率特性的定义有 G (jw )=AB e jw。
4.5已知系统的单位阶跃响应为)(。
t x =1-1.8te 4-+0.8te9-,试求系统的幅辐频特性与相频特性。
解:先求系统的传递函数,由已知条件有)(。
t x =1-1.8te 4-+0.8te9-(t 0≥))(S X i =s 1)(。
S X =s 1-1.841+s +0.891+s )(S G =)()(。
S X S X =()()9436++s s )(jw G =jw s s G =)(=()()jw jw ++9436)(w A =)(jw G =22811636ww +•+)(w ϕ=0-arctan 4w -arctan 9w =-arctan 4w -arctan 9w4.6 由质量、弹簧、阻尼器组成的机械系统如图所示。
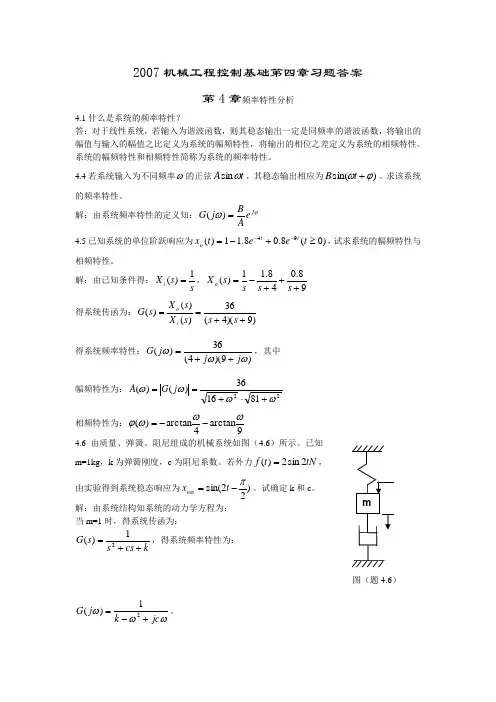
2007机械工程控制基础第四章习题答案第4章频率特性分析4.1什么是系统的频率特性?答:对于线性系统,若输入为谐波函数,则其稳态输出一定是同频率的谐波函数,将输出的幅值与输入的幅值之比定义为系统的幅频特性,将输出的相位之差定义为系统的相频特性。
系统的幅频特性和相频特性简称为系统的频率特性。
4.4若系统输入为不同频率ω的正弦t A ωsin ,其稳态输出相应为)sin(ϕω+t B 。
求该系统的频率特性。
解:由系统频率特性的定义知:ϕωj e AB j G =)( 4.5已知系统的单位阶跃响应为)0(8.08.11)(94≥+-=--t e e t x t t o ,试求系统的幅频特性与相频特性。
解:由已知条件得:s s X i 1)(=,98.048.11)(+++-=s s s s X o得系统传函为:)9)(4(36)()()(++==s s s X s X s G i o 得系统频率特性:)9)(4(36)(ωωωj j j G ++=,其中幅频特性为:22811636)()(ωωωω+⋅+==j G A相频特性为:9arctan4arctan)(ωωωϕ--=4.6由质量、弹簧、阻尼组成的机械系统如图(4.6)所示。
已知m=1kg ,k 为弹簧刚度,c 为阻尼系数。
若外力tN t f 2sin 2)(=,由实验得到系统稳态响应为)22sin(π-=t x oss 。
试确定k 和c 。
解:由系统结构知系统的动力学方程为: 当m=1时,得系统传函为:kcs s s G ++=21)(,得系统频率特性为: ωωωjc k j G +-=21)(。
图(题4.6)其中,幅频特性为2222)(1)(ωωωc k j G +-=,相频特性为2arctan)(ωωωϕ--=k c 由题意,当输入信号为t t f 2sin 2)(=时,2=ω,由其与稳态输出信号)22sin(π-=t x oss 对应关系知:2222)(121)(ωωωc k j G +-==,2arctan 2)(ωωπωϕ--=-=k c 解得4=k ,1=c 。
Automatic Control Theory自动控制理论第四章 线性系统的根轨迹法根轨迹法是一种图解方法,它是经典控制理论中对系统进行分析和综合的基本方法之一。
由于根轨迹图直观地描述了系统特征方程的根(即系统的闭环极点)在s 平面上的分布,因此,用根轨迹法分析自动控制系统十分方便,特别是对于高阶系统和多回路系统,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。
1、根轨迹的基本概念闭环系统的稳定性取决于闭环系统的极点分布,其它性能取决于其零极点分布。
因此,可以用系统的零极点分布来间接研究控制系统的性能。
伊万思在1948年提出了一种在复平面上由开环零极点确定闭环零极点的图解方法——根轨迹法。
将开环系统的某一个参数(比如开环放大系数)的全部值与闭环特征根的关系表示在一张图上。
根轨迹定义开环系统传递函数的某一个参数从零变到无穷时,闭环系统特征方程的根在复平面上变化的轨迹。
研究根轨迹的目的:分析系统的各种性能(稳定性、动态和稳态性能) 相关术语:*01210121()()()()()()()()()()mim i nn jj s z b s z s z s z G s H s K a s p s p s p s p ==----==----∏∏❖ 开环零点:指系统开环传递函数中分子多项式方程的根 ❖ 开环极点:指系统开环传递函数中分母多项式方程的根 ❖ 根轨迹增益:K *为开环系统根轨迹增益❖ 闭环零点:指系统闭环传递函数中分子多项式方程的根 ❖闭环极点:指系统闭环传递函数中分母多项式方程的根1*11()()()()1()()()()nj j n mjij i G s s p G s s G s H s s p K s z ===-Φ==+-+-∏∏∏闭环零点由前向通道的零点和反馈通道的极点构成。
对于单位反馈系统,闭环零点就是开环零点。
闭环极点与开环零、极点以及根轨迹增益K*均有关。
第四章系统的频率特性分析第四章系统的频率特性分析时间响应分析:主要用于分析线性系统的过渡过程,以时间t为独立变量,通过阶跃或脉冲输入作用下系统的瞬态时间响应来研究系统的性能;依据的数学模型为G(s)频率特性分析:以频率ω为独立变量,通过分析不同的谐波输入时系统的稳态响应来研究系统的性能;依据的数学模型为G(jω)频域分析的基本思想:把系统输入看成由许多不同频率的正弦信号组成,输出就是系统对不同频率信号响应的总和。
4.1频率特性概述1.频率响应与频率特性(1)频率响应:线性定常系统对谐波输入的稳态响应。
(frequencyresponse)对稳定的线性定常系统输入一谐波信号xi(t)=Xisin?t稳态输出(频率响应):xo(t)=Xo(?)sin[ωt+?(ω)]【例】设系统的传递函数为输入谐波信号xi(t)=Xisin?t 则稳态输出(频率响应)与输入信号的幅值成正比与输入同频率,相位不同进行laplace逆变换,整理得同频率?幅值比A(?)相位差?(?)ω的非线性函数(揭示了系统的频率响应特性)输入:xi(t)=Xisinωt稳态输出(频率响应):xo(t)=XiA(?)sin[ωt+?(ω)]幅频特性:稳态输出与输入谐波的幅值比相频特性:稳态输出与输入谐波的相位差?(?)[s]A(?)?(?)(2)频率特性:对系统频率响应特性的描述(frequencycharacteristic)频率特性定义为ω的复变函数,幅值为A(?),相位为?(?)。
输入谐波函数xi(t)=Xisin?t,其拉式变换为2.频率特性与传递函数的关系设系统的微分方程为:则系统的传递函数为:则由数学推导可得出系统的稳态响应为根据频率特性定义,幅频特性和相频特性分别为故G(j?)=?G(j?)?ej?G(j?)就是系统的频率特性如例1,系统的传递函数为所以3.频率特性的求法(1)频率响应→频率特性稳态输出(频率响应)故系统的频率特性为或表示为(2)传递函数→频率特性将传递函数G(s)中的s换成jω,得到频率特性G(jω)。
电力系统中的频率稳定性分析第一章引言在电力系统中,频率稳定性是一个至关重要的问题。
频率的稳定性对于电力系统运行的可靠性、经济性和安全性均具有重要影响。
因此,深入研究电力系统中的频率稳定性分析成为了电力系统领域的热门课题。
第二章电力系统的频率稳定性2.1 频率稳定性的定义和意义频率稳定性是指电力系统中发电频率维持在稳定水平的能力。
正常情况下,电力系统的频率应该维持在额定频率附近,即通常为50Hz或者60Hz。
频率的稳定性直接关系到电力系统的稳定运行,对于保证用户供电质量、均衡负载以及实现电力系统的互联互通具有重要作用。
2.2 频率稳定性的影响因素电力系统中的频率稳定性不仅受到外界环境的影响,还受到电力系统内部各种因素的影响。
主要的影响因素包括负载变化、发电机功率变化、电力输送线路以及控制系统等。
2.3 频率稳定性指标为了衡量电力系统的频率稳定性,通常使用频率偏差和频率偏离率两个指标。
频率偏差表示实际频率与额定频率之间的差异,频率偏离率则表示频率变化的速度。
第三章电力系统频率稳定性分析方法3.1 功率频率特性法功率频率特性法是一种常用的频率稳定性分析方法。
该方法通过改变系统负载或发电机出力,观察频率响应的变化情况,从而判断电力系统的频率稳定性。
3.2 线性化模型法线性化模型法是一种基于电力系统线性模型的频率稳定性分析方法。
通过将非线性电力系统模型线性化,可以利用频率响应和稳定裕度等指标来评估电力系统的频率稳定性。
3.3 非线性时序仿真法非线性时序仿真法是一种基于电力系统实时仿真的频率稳定性分析方法。
通过对电力系统进行时序仿真,可以获取系统中各种因素的变化情况,并结合频率响应来评估电力系统的频率稳定性。
第四章频率稳定性改善措施4.1 发电机控制策略通过调整发电机的调节器参数和控制策略,可以有效改善电力系统的频率稳定性。
包括自动励磁调节器和无功功率调节器等控制设备。
4.2 输电线路和变压器的控制适当调整输电线路和变压器的传输能力,采取合理的电压和无功功率调节措施,可以有效提高电力系统的频率稳定性。
第四章 拉普拉斯变换—连续信号s 域分析一、考试内容(知识点)1.拉普拉斯变换的定义及其性质、拉普拉斯逆变换; 2.系统的复频域分析法; 3.系统函数)(s H ;4.系统的零极点分布决定系统的时域、频域特性; 5.线性系统的稳定性;6.拉普拉斯变换与傅里叶变换之间的关系。
二、内容(知识点)详解1.拉普拉斯变换的定义、收敛域(1)变换式与反变换式dt e t f t f s F st -∞⎰-==0)()]([)(L ds e s F js F t f stj j ⎰∞+∞--==σσπ)(21)]([)(1L )(s F 称为)(t f 的象函数,)(t f 称为)(s F 的原函数。
下限值取-0,主要是考虑信号)(t f 在t =0时刻可能含有冲激函数及其导数项也能包含在积分区间之内。
(2)收敛域在s 平面上,能使式0)(lim =-→∞t t e t f σ满足和成立的σ的取值范围(区域),称为)(t f 或)(s F 的收敛域。
2.常用时间函数的拉普拉斯变换(1)冲激函数 )()(t t f δ= 1)(=s F)()()(t t f n δ= n s s F =)((2)阶跃函数 )()(t u t f = ss F 1)(= (3)n t (n 是正整数) t t f =)( 21)(s s F =2)(t t f = 32)(s s F =n t t f =)( 1!)(+=n s n s F(4)指数信号 t e t f α-=)( α+=s s F 1)(t te t f α-=)( ()21)(α+=s s F t n e t t f α-=)( ()1!)(++=n s n s F αt j e t f ω-=)( ωj s s F +=1)( (5)正弦信号、余弦信号系列)sin()(t t f ω= 22)(ωω+=s s F)cos()(t t f ω= 22)(ω+=s ss F)sin()(t e t f t ωα-= 22)()(ωαω++=s s F)cos()(t e t f t ωα-= 22)()(ωαα+++=s s s F )sin()(t t t f ω= 222)(2)(ωω+=s ss F )cos()(t t t f ω= 22222)()(ωω+-=s s s F )()(t sh t f ω= 22)(ωω-=s s F )()(t ch t f ω= 22)(ω-=s ss F (6) ∑∞=-=0)()(n nT t t f δ sT e s F --=11)(∑∞=-=00)()(n nT t f t f sTes F s F --=1)()(0 3.拉普拉斯变换的基本性质象函数)(s F 与原函数)(t f 之间的关系为:)]([)(t f s F L = (1)线性(叠加性)∑∑===⎥⎦⎤⎢⎣⎡ni i i n i i i s F a t f a 11)()(L ,其中i a 为常数,n 为正整数。
第一章绪论1.机械系统:以实现一定的机械运动、输出一定的机械能和承受一定的机械载荷为目的。
激励(输入):外界与系统的作用,如作用力(载荷)。
分为控制输入和扰动输入。
响应(输出):系统由于激励作用而产生的变形或位移。
2.机械工程控制论的研究对象和任务是什么?机械工程控制论实质上是研究机械工程中广义系统的动力学问题。
具体地说,是广义系统在一定的外界条件作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性所决定的整个动态历程,研究系统与其输入、输出三者之间的动态关系。
从系统、输入、输出三者之间的关系出发,根据已知条件与求解问题的不同,机械控制工程论的任务可以分为以下五个方面:(系统分析问题)已知系统和输入,求系统的输出。
(最优控制问题)已知系统和理想输出,设计输入。
(最优设计问题)已知输入和理想输出,设计系统(滤波与预测问题)已知输出,确定系统,以识别输入或输出中的有关信息。
(系统辨识问题)已知输入和输出,求系统的结构与参数。
3.控制系统的基本要求(稳、准、快)稳定性:动态过程的振荡倾向和系统能够恢复平衡状态的能力。
稳定性是系统工作的首要条件。
准确性:在调整过程结束后输出量与给定的输入量之间的偏差。
衡量系统工作性能的重要指标。
快速性:系统输出量与希望值之间产生偏差时,消除这种偏差的快速程度。
控制的三要素:控制对象、控制目标、控制手段。
控制论的两个核心:信息和反馈需要解决的两大基本问题:控制系统的分析和控制系统的设计。
4.反馈:将系统的输出以一定的方式返回到系统的输入端并共同作用于系统的过程。
内反馈:系统或过程中存在的各种自然形成的反馈。
内反馈是造成机械系统存在动态特性的根本原因。
外反馈:在自动控制系统中,为达到某种控制目的而人为加入的反馈。
正反馈:能使系统的绝对值增大的反馈。
负反馈:能使系统的绝对值减小的反馈。
5.自动控制的本质:闭环自动控制系统的工作过程就是一个“检测偏差并纠正偏差”的过程。