Ch07--间接平差--例题
- 格式:doc
- 大小:256.00 KB
- 文档页数:9
第六章间接平差第一节间接平差原理第二节误差方程第三节精度评定第四节平差示例一、数学模型V L L+=ˆ第一节间接平差原理l x B V −=ˆLLLL Q D 2σ=AB Ch 4h 3h 1h 5h 2hh h第一节间接平差原理二、基础方程和它的解l xB V −=ˆ最小=PV V T按函数极值的求法,极值函数:min )ˆ()ˆ(=−−=l x B P l x B PV TT 02=PB V T-----法方程=PV B T基础方程0ˆ)(=−Pl B xPB B TT解即得:PlB PB B TT 1)−l x B −ˆVL L +=ˆ-----法方程0ˆ)(=−Pl B xPB B TT bbN二、间接平差法平差步骤1、选择第二节误差方程一、确定待定参数的个数二、参数的选取高程控制网:待定点的高程A B Ch 4h 3h 1h 5h 2三、误差方程的组成1、水准路线的误差方程ijX iX j2、方向的误差方程N零方向kljkL jlLjY k X jZ 设j 、k 的坐标为未知参数:jkLˆˆˆ对上式在初始近似值处进行Taylor级数展开:0000)(jZXXYY arctg x Y f x Xf yY f xXf zVLjkj k k kkkjj jjjjkjk−−−+∂∂+∂∂+∂∂+∂∂+−=+kk k z Z Z +=0ˆjj j x X X +=0ˆjj j y Y Y +=0ˆkk k x X X +=0ˆkk k y Y Y +=0ˆ22)(1)()1)((jk j k j k j k jX X Y Y X X Y Y Xf −−+−−−−=∂∂22)()()(j k j k j k Y Y X X Y Y −+−−=jkjk jkjk S SY αsin 2=Δ=22)(1)()(jk j k j k j k kX X Y Y X X Y Y X f −−+−−−=∂∂22)()()(j k j k j k Y Y X X Y Y −+−−−=jkjk jkjk S SY αsin 2−=Δ−=2)(1)(1jk j k j k j X X Y Y X X Y f −−+−−=∂∂22)()()(j k j k j k Y Y X X X X −+−−−=jkjkjk jk S S X αcos 2−=Δ−=)(j k X X −=0000(00000XXY Y arctg x Y f x Xf yYf xXfz VLj k k YX kY X jY X jjjj jkjk−−+∂∂+∂∂+∂∂+∂∂+−=+0000(cos sin jkjkY Y arctg x x ySxSz Vj k j jkjjkjjk jk−++−+−=+αα0000(cos sin jkjkY Y arctg Lx x ySxSzj k jkjjkjjkjjk−+−+−+−=αα当j 点已知时:000000)(cos sin jjkjkZXXY Y arctg Lx S x SzVjkj k jkkjk k jk jjk−−−+−+−−=ααN零方向kljkL jlLjjY k X jZ 0000000000000)(cos sin cos sin jjkjkjkjkZXXY Y arctg Lx Sx SySxSzVj kj k jkk jkk jkjjkjjkjjk−−−+−+−+−=αααα000)(ZY Y S xS jk jk j jk−−−当k 点已知时:21)ˆˆˆˆ()ˆˆˆˆ(ˆˆF F X X Y Y arctg X X Y Y arctg v L jh jh j k j k jh jk i i −=−−−−−=−=+αα2、角度的误差方程khX Y h X hY jhααjj j x X X +=0ˆjj j y Y Y +=0ˆkk k x X X +=0ˆkk k y Y Y +=0ˆ:)ˆ,ˆ,ˆ,ˆ(11kk j j Y X Y X F F =L +∂∂+∂∂+∂∂+∂∂+=k k k k j jj j yY F x X F y Y F x X F F F ˆˆˆˆˆˆˆˆ1111011L +∂∂+∂∂+∂∂+∂∂+=h hh h j jj j yY F x X F y Y F x X F F F ˆˆˆˆˆˆˆˆ2222022j h hh h j j j j k k k k j j j j j L F F y Y F x X F y Y F x X F y Y F x X F y Y F x X F v −−+∂∂+∂∂+∂∂+∂∂+∂∂+∂∂+∂∂+∂∂=020*******11ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ⎟⎟⎠⎞⎜⎜⎝⎛−−−−−−=−−=)()()(000000000jhj h jk j k i jhjki i X X Y Y arctg X X Y Y arctg L L l αα()()()()()()()()i h jh jhh jh jh k jk jk k jkjk j jh jh jkjk j jh jh jk jk i l y S X x S Y y S X x S Y y S X S X x S Y S Y v −Δ′′−Δ′′+Δ′′+Δ′′−⎟⎟⎠⎞⎜⎜⎝⎛Δ−Δ′′−⎟⎟⎠⎞⎜⎜⎝⎛Δ−Δ′′=ˆˆˆˆˆˆ200200200200200200220200ρρρρρρ()()()()()()()()i h jhjh h jh jh j jh jh j jh jh k jkjk k jkjk j jkjk j jkjk i l y S X x S Y y S X x S Y yS XxS YyS XxS Yv −⎟⎟⎠⎞⎜⎜⎝⎛Δ′′+Δ′′−Δ′′−Δ′′−Δ′′+Δ′′−Δ′′−Δ′′=ˆˆˆˆˆˆˆˆ200200200220200200200200ρρρρρρρρ3、距离的误差方程jkS 设j 、k 的坐标为未知参数:jk 的距离为:22)ˆˆ()ˆˆ(j k j kY Y X X−+−对上式在初始近似值处进行Taylor级数展开:j j x X X +=0~jj y Y Y +=0~k k x X X +=0~kk y Y Y +=0~设:200200)()(jkjkkkkjjj jjkY Y X XY x XyY xX −+−∂+∂+∂+∂=22)ˆˆ()ˆˆ(ˆj k j kjkY Y X XS−+−=jkjk j k j k j k j SX Y Y X X X X X fαcos )()(2)(222−=Δ−=−+−−−=∂∂jkjk j k j k j k j S Y Y Y X X Y Y Y fαsin )()(2)(222−=Δ−=−+−−−=∂∂jkjk j k j k j k k S X Y Y X X X X X fαcos )()(2)(222=Δ=−+−−=∂∂jkjk j k j k j k k S Y Y Y X X Y Y Y fαsin )()(2)(222=Δ=−+−−=∂∂200200)()(0jk j kk YXkkYX kjYX jjYX jjkjkY Y XXx Y f x Xf yY f xXf VS−+−+∂∂+∂∂+∂∂+∂∂+=+2200)()(j k j k Y Y X X −+−jkjkYY XX−+−200200)()(当j 点已知时:当k 点已知时:jk jk Y Y X X −+−202)()(j k j kY Y X X −+−2020)()(3、拟合模型误差方程(1) 圆曲线拟合:圆曲线参数方程:iii i r Y Yr X X ααˆsin ˆˆˆˆcos ˆˆˆ00+=+=)、(i i Y X 圆心坐标ii iiyii y xi ix l r r y v l r r x v −−+=−−+=ρδααδαρδααδα0000000cos sin ˆsin cos ˆ(2) 高程拟合:25423210ˆii i i i i i y b y x b x b y b x b b Z +++++=ii i i i i i Z Z b y b y x b x b y b x b v i −+++++=52432210ˆˆˆˆˆˆ5、坐标转换模型误差方程x Oyα()00y x O 、′xx ′y ′坐标变换方程:ααααsin cos sin cos 00m x m y y y m y m x x x i i i i i i ′+′+=′−′+=⎥⎥⎥⎥⎥⎥⎥⎥⎤⎢⎢⎢⎢⎢⎢⎢⎢⎡−⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎤⎢⎢⎢⎢⎢⎢⎢⎢⎡′−′′′′−′′′′−′=⎥⎥⎥⎥⎥⎥⎥⎥⎤⎢⎢⎢⎢⎢⎢⎢⎢⎡n n n x y x y x x y x y x d c b ay x x y y x x y y x v v v v v n M M M M 2211222211112ˆˆˆˆ0110011001211第三节精度评定rPVV T二、协因数阵一、计算单位权中误差d X B L+=ˆˆl xB V −=ˆ基本向量间的关系:111)()()(−−−==∧∧PB B PB B PQPB B PB B Q T TTTxx TBBVV VL LV L L BBNQ Q Q Q Q 1ˆˆ−=+++=QQ Q ll LL ==三、参数函数的中误差()tX X X ˆ,,ˆ,ˆˆ21L Φ=ϕX d F d Tˆˆ=ϕFN F F Q F Q bbTX X T 1ˆˆˆˆ−==ϕϕ[]t Tf f f F L21=测角网间接平差算例:C123456789121110131415161718P2P1坐标(m)边长方位角点名X(m)Y(m)A9684.2843836.82B10649.5531996.5011879.60274°39’38.4" C19063.6637818.8610232.1634°40’56.3" D17814.6349923.1912168.6095°53’29.1" A10156.11216°49’06.5"解:n=18, t=2*6-4-4=4, r=18-4=14设P1、据前方交会可以求出00000cos sin cos sin ()(ji jkjjijk jik y x x x S SxS S jijijkjk−++−−−=αααα⎢⎢⎢⎢⎢⎢⎢⎡⎥⎥⎥⎥⎥⎥⎥⎤⎢⎢⎢⎢⎢⎢⎢⎡54321V V V V V xl定权,P ⎢⎢⎢⎢⎡−−+45.1111.2261.94停止返回精度评定:1428.220±==ΛrPVV Tσ0121.00161.00117.00169.016.014.022+17.014.022+例:如图,定点。
第十二章第十二章、、间接平差间接平差12.0概述概述间接平差又称参数平差。
水平控制网按间接平差时,通常选取待定点的坐标平差值作为未知数(按方向平差时,还增加测站定向角未知数),平差后直接求得各待定点的坐标平差值,故这种以待定点坐标作为未知数的间接平差法也称为坐标平差法坐标平差法坐标平差法。
参加平差的量可以是网中的直接观测量,例如方向、边长等;也可以是直接观测量的函数,例如角度等。
由于三角网的水平角一般是采用方向观测法观测,并由相邻方向相减而得,故它们是相关观测值。
此时,若不顾及函数间的相关性,平差结果将受到一定的曲解。
因此,坐标平差法都按方向平坐标平差法都按方向平坐标平差法都按方向平差差。
间接平差的函数模型是误差方程,它是表达观测量与未知数之间关系的方程式。
一般工程测量平面控制网的观测对象主要是方向(或角度)和相邻点间的距离(即边长)因此坐标平差时主要列立各观测方向及观测边长的误差方程式,再按照间接平差法的原理和步骤,由误差方程和观测值的权组成未知数法方程去解算待定点坐标平差值,并进行精度评定。
本章主要研究(测)方向网、测边网以及测边测角网的严密坐标平差。
水平控制网按坐标平差法进行平差时,为降低法方程的阶数以便于解算,定向角未定向角未知数可采用一定的法则予以消掉知数可采用一定的法则予以消掉。
由于误差方程式的组成简单且有规律,便于由程序实现全部计算,因此,在近代测量平差实践中,控制网按间接平差法得到了广泛的应用。
平面控制网按坐标平差时,网中每一观测值都应列立一个误差方程式。
为便于计算,通常总是将观测值改正数表示为对应待定点坐标近似值改正数的线性式。
坐标平差的第一步是列组误差方程式。
对于方向网而言,参与平差的观测值是未定向的方向,选定的未知数是待定点的纵、横坐标值。
误差方程式就是方向观测值改正数表达为待定点纵横坐标值的函数式,可以通过坐标方位角来建立方向值与未知数之间的联系。
§12.1三角网坐标平差三角网坐标平差12.1.1方向误差方程式的建立和组成方向误差方程式的建立和组成在测站k 上观测了n i k k k ,,,0L等方向 其方向观测值为kn ki k N N N ,,,0L 它们的改正数为kn ki k V V V ,,,0L0k 为测站的零方向(起始方向),则任意方向ik 的坐标方位角平差值方程为ki ki k k ki k ki V N Z N Z +++=+=ςα (12-1)式中:ki N 为ki 方向的平差值,k Z 为0k 方向的坐标方位角,通常称测站定向角,k Z 为定向角k Z 的近似值,k ς为定向角k Z 的改正数,是个未知参数,k k k Z Z ς+=,ki ki ki V N N +=如果令i k ,两点的近似坐标分别为00,k k y x 和00,i i y x ,其相应的改正数分别为kky x δδ,和i i y x δδ,,则有关系:ii i i i i y y y x x x δδ+=+=00 ki ki ki δααα+=0(12-4)ki ki ki x x y y arctg−−=α (12-3)kkk k kk y y y x x x δδ+=+=0()()()()kk i i kk i i kikix x x xy y y yarctgδδδδδαα+−++−+=+00000将上式按台劳级数展开,()()k k ki i i ki k k ki i i ki k iki kikiy y y y x x x x x xy y arctgδαδαδαδαδαα000000 ∂∂+ ∂∂+ ∂∂+ ∂∂+−−=+k k ki i i ki k k ki ii ki ki y y y y x x x x δαδαδαδαδα0∂∂+ ∂∂+ ∂∂+ ∂∂= ()()()()200200200020000200000sin 1kiki kiki kikiki kik i k ik i k ki S S y yyxxy y x x y y xxy y x αα=∆=−+−−=−−+−−= ∂∂坐标方位角改正数方程:()()()()i kikii kikik kikik kikiki y S y x S y y S x x S y δδδδδα200200200200∆+∆−∆−∆=(12-5)将(12-5)代入(12-4)然后再代入(12-1)得:()()()()ki i kikii kiki k kikik kikik ki l y S y x S y y S x x S y V +∆+∆−∆−∆+−=δδδδς200200200200(12-6)式中,k ki ki ki Z N l −−=0α (12-7)计算中,ki S 以㎏为单位,k k y x δδ,和i i y x δδ,以dm 为单位,且换以ηδξδ==y x 1010(12-6)变为,ki i ki i ki k ki k ki k ki l b a b a V +−−++−=ηξηξς (12-8)式中,404010cos 10sin kiki ki ki ki ki S b S a αραρ′′−=′′=(10-9)(12-6)和(12-8)式为方向误差方程式,考虑到边长误差方程式(12-35)式以便于编程常用(12-8)式。
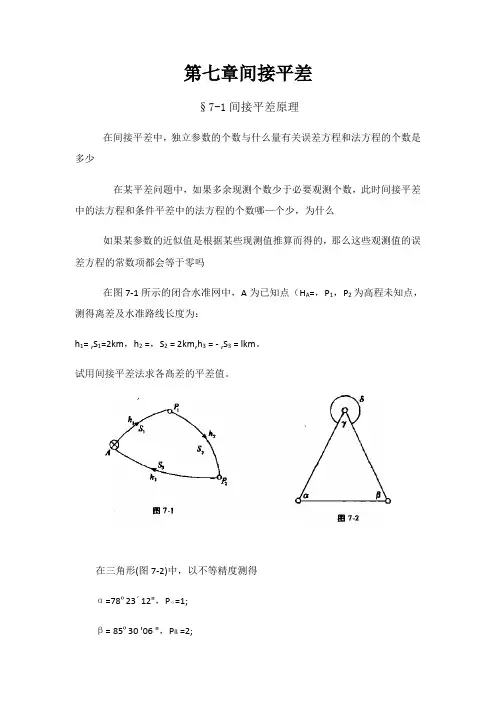
第七章间接平差§7-1间接平差原理在间接平差中,独立参数的个数与什么量有关误差方程和法方程的个数是多少在某平差问題中,如果多余现测个数少于必要观测个数,此时间接平差中的法方程和条件平差中的法方程的个数哪—个少,为什么如果某参数的近似值是根据某些现测值推算而得的,那么这些观测值的误差方程的常数项都会等于零吗在图7-1所示的闭合水准网中,A为已知点(H A=,P1,P2为高程未知点,测得离差及水准路线长度为:h1= ,S1=2km,h2 =,S2 = 2km,h3 = - ,S3 = lkm。
试用间接平差法求各髙差的平差值。
在三角形(图7-2)中,以不等精度测得α=78º23´12",Pα=1;β= 85º30 '06 ",Pß =2;γ=16º06'32",Pγ=1;δ=343º53'24", Pδ=1;试用间接平差法求各内角的平差值。
7. 设在单一附合水准路线(图7-3)中已知A,B两点高程为H A,H B,路线长为S1,S2,观测高差为h1 h2,试用间接平差法写出P点高程平差值的公式。
7. 在测站0点观测了6个角度(如图7-4所示),得同精度独立观测值:L1=32º25'18", L2 =61º14'36",L3=94º09'40",L4 172010'17"L5=93º39'48", L6=155º24'20"已知A方向方位角αA =21º10'15",试按间接平差法求各方向方位角的平差值。
§7-2误差方程在间接平差中,为什么所选参数的个数应等于必要观测数,而且参数之间要函数独立能否说选取了足够的参数,每一个观侧值都能表示成参数的函数. 10在平面控制网中,应如何选取参数. 11条件方程和误差方程有何异同误差方程有哪些特点. 13图7-5中,A,B为已知点,P1~ P5为待定点,P1, P5两点间的边长为已知,L1~L6为角度观测值,S1~S6为边长观测值,试确定图中独立参数的个数。


第七章间接平差§7-1间接平差原理7.1.01 在间接平差中,独立参数的个数与什么量有关?误差方程和法方程的个数是多少?7.1.02 在某平差问題中,如果多余现测个数少于必要观测个数,此时间接平差中的法方程和条件平差中的法方程的个数哪—个少,为什么?7.1.03 如果某参数的近似值是根据某些现测值推算而得的,那么这些观测值的误差方程的常数项都会等于零吗?7.1.04 在图7-1所示的闭合水准网中,A为已知点(HA =10.OOOm),P1,P2为高程未知点,测得离差及水准路线长度为:h 1= 1.352m,S1=2km,h2=-0.531m,S2= 2km,h3= - 0.826m,S3= lkm。
试用间接平差法求各髙差的平差值。
7.1.05在三角形(图7-2)中,以不等精度测得α=78º23´12",Pα=1;β= 85º30 '06 ",Pß=2;γ=16º06'32",Pγ=1;δ=343º53'24", Pδ=1;试用间接平差法求各内角的平差值。
7. 1.06设在单一附合水准路线(图7-3)中已知A,B两点高程为HA,HB,路线长为S 1,S 2,观测高差为h 1 h 2,试用间接平差法写出P 点高程平差值的公式。
7. 1.07在测站0点观测了6个角度(如图7-4所示),得同精度独立观测值: L 1=32º25'18", L 2 =61º14'36", L 3=94º09'40",L 4 172010'17" L 5=93º39'48", L 6=155º24'20"已知A 方向方位角αA =21º10'15",试按间接平差法求各方向方位角的平差值。
Ch07 间接平差__例题例7.1.1 平差原理在一个三角形中,等精度独立观测了三个角,观测值分别为L 1、L 2和L 3。
求此三角形各内角的最或然值。
若能选取两个内角L 1、L 2的平差值【最或然值】作为参数1ˆX 、2ˆX ,则可以建立参数与观测值之间的函数关系式⎪⎪⎩⎪⎪⎨⎧+--=+=+=+180ˆˆˆˆ2133222111X X v L X v L X v L 称为观测方程 可得⎪⎪⎩⎪⎪⎨⎧-+--=-=-=3213222111180ˆˆˆˆL X X v L X v L X v 称为误差方程为了计算方便和计算数值的稳定性,通常引入未知参数的近似值,这一点在实际计算中是非常重要的,令i ii x X X ˆˆ0+= x X X ˆˆ0+=,则上式可写成如下形式: ⎪⎩⎪⎨⎧-++---=--=--=)180(ˆˆ)(ˆ)(ˆ020132130222201111X X L x x v X L x v X L x v 称为误差方程 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111001B ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-++--=18002013022011X X L X L X L l ,l x B V -=ˆ 也可以称为某种意义上的条件方程(包含改正数、观测值和参数,“条件个数=观测值个数”),每个条件方程中仅只含有一个观测值,且系数为1。
单纯为消除矛盾,1v 、2v 、3v 可有多组解,为此引入最小二乘原则:231][i i v vv ∑==min =PV V T 可求得唯一解。
因此,间接平差是选取与观测值有一定关系的独立未知量作为参数,建立参数与观测值之间的函数关系,按最小二乘原则,求解未知参数的最或然值,再根据观测值与参数间的函数关系,求出观测值的最或然值,故又称为参数平差。
对上述三角形,引入最小二乘原则,要求:231][i i v vv ∑== min =PV V T ,设观测值为等精度独立观测,则有:min)]180(ˆˆ[)](ˆ[)](ˆ[][202013212022220111231=-++---+--+--==∑=X X L x x X L x X L x v vv i i min =PV V T按数学上求自由极值的方法对上式分别求偏导数并令等于零,可得⎪⎪⎩⎪⎪⎨⎧=-++------=∂∂=-++------=∂∂0)]180(ˆˆ[2)](ˆ[2ˆ][0)]180(ˆˆ[2)](ˆ[2ˆ][020132102122020132101111X X L x x X L x x vv X X L x x X L x xvv 0=V B T=>⎩⎨⎧=-+-+++=-+-+++)2(01802ˆ2ˆ)1(01802ˆˆ23202012131020121L L X X x x L L X X x x 0=-l B Bx B T T(2)×2-(1)=>018023ˆ3321022=-+-++L L L X x=>60313231ˆˆ3212022+-+-==+L L L X X x =>60313132ˆˆ3211011+--==+L L L X X x l B B B x T T 1)(-=, l xB V -=ˆ 代入误差方程式,得到观测值的平差值【最或然值】⎪⎪⎪⎩⎪⎪⎪⎨⎧++--=+--+-=+--=60323131ˆ60313231ˆ60313132ˆ321332123211L L L L L L L L L L L L V L L +=ˆ例7.1.2 水准网如图所示的水准网中,A 、B 、C 为已知水准点,高差观测值及路线长度如下: 1h = +1.003m , 2h = +0.501m , 3h = +0.503m , 4h = +0.505m ; 1S =1km , 2S =2km , 3S =2km ,4S =1km 。
Ch07 间接平差__例题例 平差原理在一个三角形中,等精度独立观测了三个角,观测值分别为L 1、L 2和L 3。
求此三角形各内角的最或然值。
若能选取两个内角L 1、L 2的平差值【最或然值】作为参数1ˆX 、2ˆX ,则可以建立参数与观测值之间的函数关系式⎪⎪⎩⎪⎪⎨⎧+--=+=+=+180ˆˆˆˆ2133222111X X v L X v L X v L 称为观测方程 可得⎪⎪⎩⎪⎪⎨⎧-+--=-=-=3213222111180ˆˆˆˆL X X v L X v L X v 称为误差方程为了计算方便和计算数值的稳定性,通常引入未知参数的近似值,这一点在实际计算中是非常重要的,令i ii x X X ˆˆ0+= x X X ˆˆ0+=,则上式可写成如下形式: ⎪⎩⎪⎨⎧-++---=--=--=)180(ˆˆ)(ˆ)(ˆ020132130222201111X X L x x v X L x v X L x v 称为误差方程 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111001B ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-++--=18002013022011X X L X L X L l ,l x B V -=ˆ 也可以称为某种意义上的条件方程(包含改正数、观测值和参数,“条件个数=观测值个数”),每个条件方程中仅只含有一个观测值,且系数为1。
单纯为消除矛盾,1v 、2v 、3v 可有多组解,为此引入最小二乘原则:231][i i v vv ∑==min =PV V T 可求得唯一解。
因此,间接平差是选取与观测值有一定关系的独立未知量作为参数,建立参数与观测值之间的函数关系,按最小二乘原则,求解未知参数的最或然值,再根据观测值与参数间的函数关系,求出观测值的最或然值,故又称为参数平差。
对上述三角形,引入最小二乘原则,要求: 231][i i v vv ∑==min =PV V T ,设观测值为等精度独立观测,则有:min)]180(ˆˆ[)](ˆ[)](ˆ[][202013212022220111231=-++---+--+--==∑=X X L x x X L x X L x v vv i i min =PV V T按数学上求自由极值的方法对上式分别求偏导数并令等于零,可得⎪⎪⎩⎪⎪⎨⎧=-++------=∂∂=-++------=∂∂0)]180(ˆˆ[2)](ˆ[2ˆ][0)]180(ˆˆ[2)](ˆ[2ˆ][020132102122020132101111X X L x x X L x x vv X X L x x X L x xvv 0=V B T=>⎩⎨⎧=-+-+++=-+-+++)2(01802ˆ2ˆ)1(01802ˆˆ23202012131020121L L X X x x L L X X x x 0=-l B Bx B T T(2)×2-(1)=>018023ˆ3321022=-+-++L L L X x=>60313231ˆˆ3212022+-+-==+L L L X X x =>60313132ˆˆ3211011+--==+L L L X X x l B B B x T T 1)(-=, l xB V -=ˆ 代入误差方程式,得到观测值的平差值【最或然值】⎪⎪⎪⎩⎪⎪⎪⎨⎧++--=+--+-=+--=60323131ˆ60313231ˆ60313132ˆ321332123211L L L L L L L L L L L L V L L +=ˆ例 水准网如图所示的水准网中,A 、B 、C 为已知水准点,高差观测值及路线长度如下: 1h = +1.003m , 2h =+0.501m , 3h = +0.503m , 4h = +0.505m ; 1S =1km , 2S =2km , 3S =2km , 4S =1km 。
已知 A H =11.000m ,B H =11.500m ,C H =12.008m ,试用间接平差法求 1P 及 2P 点的高程平差值。
图解:(1)按题意知必要观测数 t =2,选取 1P 、 2P 两点高程 1ˆX 、 2ˆX 为参数,取未知参数的近似值为 )(003.12101m h H X A =+=、 )(511.12302m h H X C =+=,令2km 观测为单位权观测,则2,1,1,24321====P P P P 。
(2)根据图形列平差值条件方程式,计算误差方程式如下)(ˆ)(ˆ)(ˆˆ)(ˆ01414023230102221201111B C A H X h xv H X h x v X X h x x v H X h xv +--=+--=+--+-=+--=代入具体数值,并将改正数以(mm)为单位,则有2ˆ0ˆ)7(ˆˆ0ˆ142321211-=-=--+-=-=x v x v x x v xv可得 B 、 P 和 l 矩阵如下⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=01101101B 、 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2000010000100002P 、⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=2070l (3)依据最小二乘原理,由误差方程系数 B 和自由项 l 组成法方程 0ˆ=-Pl B xPB B T T得 0711ˆˆ211521=⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡⋅⎥⎦⎤⎢⎣⎡--xx解算法方程,求出参数 xˆ )(7.27.17115112917112115ˆˆ121mm x x⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-⋅⎥⎦⎤⎢⎣⎡⋅=⎥⎦⎤⎢⎣⎡-⋅⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡- (4)计算参数的平差值 x X Xˆˆ0+=; )(5083.120047.12)(7.27.1)(511.12003.12ˆˆˆˆ21020121m mm m x x X X X X ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡(5)由误差方程计算 V ,求出观测量平差值 V h h +=∧;)(5047.05003.05037.00047.1)(3.07.27.27.1)(505.0503.0501.0003.1ˆˆˆˆ432143214321m mm m v v v v h h h h h h h h ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡例 导线网平差如图4-7所示,A 、B 、C 为已知点,P 1、P 2是待定点。
同精度观测了六个角度1L 、2L 、…、6L ,测角中误差为±2.5″,测量了四条边长7s 、8s 、9s 、10s ,观测结果及其中误差见表4-2。
起算数据见表4-1。
试按间接平差法求待定点P 1及P 2的坐标平差值。
表4-1表4-2解:本题10=n ,即有10个误差方程,其中有6个角度误差方程,4个边长误差方程。
必要观测数422=⨯=t 。
现取待定点坐标平差值为参数,即TY X Y X X ]ˆˆˆˆ[ˆ2211=① 计算待定点近似坐标各点近似坐标按坐标增量计算,结果见表4-3。
表4-3② 由已知点坐标和待定点近似坐标计算待定边的近似坐标方位角0α和近似边长0S (见表4-4)。
表4-4③ 计算坐标方位角改正数方程的系数。
计算时0S 、0X ∆、0Y ∆均以m 为单位,而xˆ、y ˆ因其数值较小,采用cm 为单位。
有关系数值的计算见表4-5、表4-6。
表4-5表4-6表4-7④ 法方程的组成和解算由表4-7取得误差方程的系数项B 、常数项l ,组成法方程的系数项bb N 、常数项Pl B T ,可得法方程为284.14622.5387.15207.23ˆˆˆˆ138.6721.4536.1155.2721.4246.15414.0866.7536.1414.0543.3029.0155.2866.7029.0141.122211=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------y xy x系数阵PB B N Tbb =的逆阵为 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-2433.00759.00967.00062.00759.01227.00191.00660.00967.00191.03219.00040.00062.00660.00040.01240.01bbN由Pl B N x Tbb 1ˆ-=算得参数改正数x ˆ: ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡3.21.04.34.2284.14622.5387.15207.232433.00759.00967.00062.00759.01227.00191.00660.00967.00191.03219.00040.00062.00660.00040.01240.0ˆˆˆˆ2211y x y x (cm ) ⑤ 平差值计算坐标平差值⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡944.7992409.4684722.6513049.4933ˆˆˆˆˆˆˆˆ2211020201012211y x y x Y X Y X Y X Y X观测值的平差值根据公式l xB V -=ˆ得各改正数为 []TV 9.16.38.28.26.2.133.11.12.43.0--------=从而得平差值为V L L +=ˆ,如下表4-8表4-8编号观测值 平差值 角1 44 05 44.8 44 05 44.52 93 10 43.1 93 10 47.3 342 43 27.2 42 43 28.3 4 201 48 51.2 201 48 49.9 5 201 57 34.0 201 57 32.7 6 168 01 45.2 168 01 42.6 边7 2185.070 2185.042 81522.853 1522.825 9 1500.017 1499.981 101009.0211009.002例 水准网—P125 例题7-6在图7-11中,A 、B 为已知水准点,高程为A H 、B H ,设为无误差,各观测的路线长度分别为 41=S km , 22=S km ,23=S km , 44=S km ,试求P 1和P 2点平差高程的协因数。
解:平差的参数选取P 1和P 2点高程,设为1ˆX 和2ˆX ,按图组成误差方程为 图 7-11144ˆ224ˆˆ224ˆˆ144ˆ242433213222121111==--===-+-===-+-===-=P l xv P l x x v P l x x v P l x v 定权时令C =4,即以4 km 观测高差为单位权观测值,因观测值相互独立,故ii i Q P /1=,相关协因数)(0j i Q ij ≠=,由此得法方程为0ˆ5ˆ40ˆ4ˆ5221121=-+-=--W x xW x x因为1ˆˆ-=bb X X N Q ,故有⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=-56.044.044.056.054451ˆˆX X Q平差后P 1、P 2点高程的协因数分别为56.011ˆˆ=X X Q ,56.022ˆˆ=X X Q ,1ˆX 与2ˆX 的协因数则为44.021ˆˆ=X X Q。