教案平面机构的自由度
- 格式:doc
- 大小:1.20 MB
- 文档页数:4
机械设计基础平面机构的自由度学院:___________________________ 专业:___________________________ 班级:___________________________第二节平面机构的自由度教学过程:一、复习有关内容(6分钟):1.平面运动副的分类:根据运动副元素的不同,平面运动副可分为低副和高副。
2.低副:两构件之间通过面与面接触而组成的运动副称为低副。
3.高副:两构件以点或线的形式相接触而组成的运动副称为高副。
4.运动副的概念:两个构件之间的可动连接称为运动副。
5.低副分为移动副和转动副。
6.机构运动简图的概念:表示机构的结构组成及运动原理而不严格按照比例绘制的机构运动简图,称为机构示意图。
二、导入新课(4分钟):通过对平面四连杆机构的运动分析,引入自由度与运动副之间的关系,引导学生思考运动副是如何影响自由度的。
三、讲授新课(33分钟):(一)运动链成为机构的条件1、运动链自由度的计算平面运动链:(设n个活动构件,P L个低副,P H个高副)F = 3 n - 2 P L - P H空间运动链:F = 6 n - 5 p - 4 p - 3 p - 2 p - p2、运动链成为机构的条件:(原动件数>F,机构破坏)F = 3 x 3 - 2 x 4 - 0 = 1(原动件数二机构自由度):铰链五杆机构:F=3*4-2*5=2(原动件数〈机构自由度数):机构运动不确定(任意乱动)3、结论:(1)F W0,构件间无相对运动,不成为机构。
(2)F>0,原动件数二F,运动确定;原动件数<F,运动不确定;原动件数>尸,机构破坏。
(二)计算自由度应注意的问题(1)复合铰链处理方式:m-1例:F=3*7-2*10-0=1(2)局部自由度(与输出件运动无关的自由度称局部自由度)F = 3 x 3 —2 x 3 -1 = 2?Mi Hi(3)虚约束:在特殊的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。
湖北职业技术学院备课纸《机械设计基础》教案教学内容:平面机构自由度教学方式:结合实际,由浅如深讲解教学目的:1.理解机构自由度的计算公式;2.明确平面机构具有确定运动的条件;3.清楚平面机构自由度计算应注意的问题;4.掌握平面机构自由度计算的实际应用。
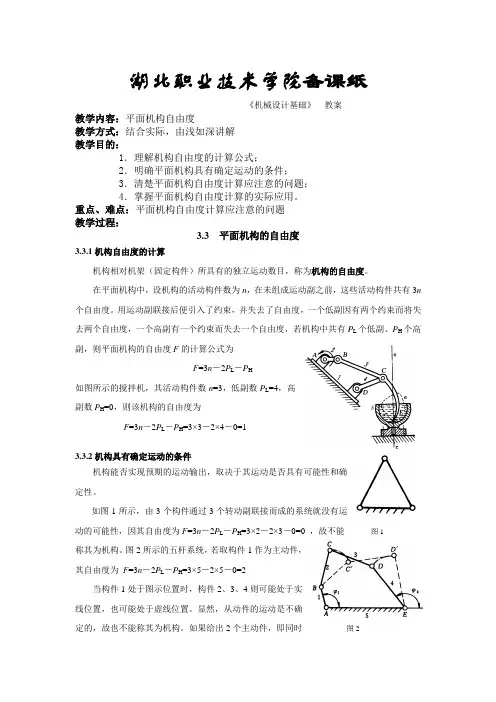
重点、难点:平面机构自由度计算应注意的问题教学过程:3.3 平面机构的自由度3.3.1机构自由度的计算机构相对机架(固定构件)所具有的独立运动数目,称为机构的自由度。
在平面机构中,设机构的活动构件数为n,在未组成运动副之前,这些活动构件共有3n 个自由度。
用运动副联接后便引入了约束,并失去了自由度,一个低副因有两个约束而将失去两个自由度,一个高副有一个约束而失去一个自由度,若机构中共有P L个低副、P H个高副,则平面机构的自由度F的计算公式为F=3n-2P L-P H如图所示的搅拌机,其活动构件数n=3,低副数P L=4,高副数P H=0,则该机构的自由度为F=3n-2P L-P H=3×3-2×4-0=13.3.2机构具有确定运动的条件机构能否实现预期的运动输出,取决于其运动是否具有可能性和确定性。
如图1所示,由3个构件通过3个转动副联接而成的系统就没有运动的可能性,因其自由度为F=3n-2P L-P H=3×2-2×3-0=0 ,故不能图1称其为机构。
图2所示的五杆系统,若取构件1作为主动件,其自由度为F=3n-2P L-P H=3×5-2×5-0=2当构件1处于图示位置时,构件2、3、4则可能处于实线位置,也可能处于虚线位置。
显然,从动件的运动是不确定的,故也不能称其为机构。
如果给出2个主动件,即同时图2给定构件1、4的位置,则其余从动件的位置就唯一确定了(图2实线),此时,该系统则可称为机构。
当主动件的位置确定以后,其余从动件的位置也随之确定,则称机构具有确定的相对运动。
那么究竟取一个还是几个构件作主动件,这取决于机构的自由度。


第一讲一、教学目标(一)能力目标能根据实物绘制机构运动简图(二)知识目标1.了解机构组成原理2.理解自由度、运动副、约束的概念及三者的关系二、教学内容1.运动副及其分类2.平面机构的运动简图三、教学的重点与难点(一)重点平面机构的运动简图的绘制。
(二)难点绘制简图时构件及运动副的准确表示。
四、教学方法与手段多媒体教学,采用动画演示、实例分析、启发引导的教学方式。
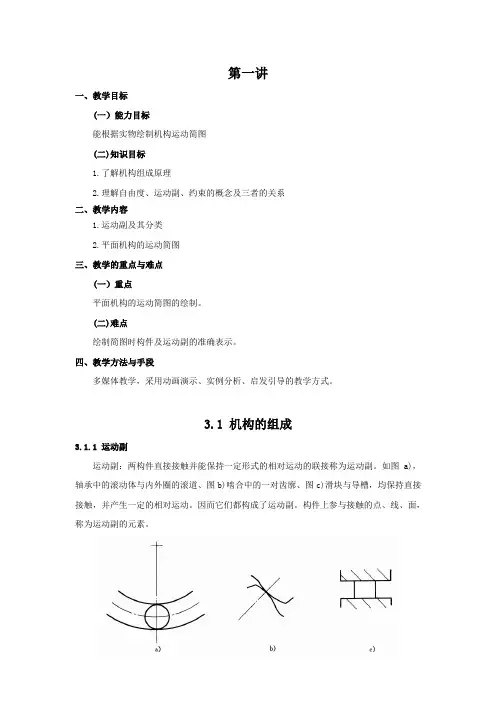
3.1 机构的组成3.1.1 运动副运动副:两构件直接接触并能保持一定形式的相对运动的联接称为运动副。
如图a),轴承中的滚动体与内外圈的滚道、图b)啮合中的一对齿廓、图c)滑块与导槽,均保持直接接触,并产生一定的相对运动。
因而它们都构成了运动副。
构件上参与接触的点、线、面,称为运动副的元素。
根据运动副对构件运动形式的约束及两构件接触方式的不同,运动副可如下分类: 1、 高副两构件通过点或线接触组成的运动副称为高副。
如图所示,凸轮与从动杆及两齿轮分别在其接触处组成高副。
2、低副 两构件通过面接触组成的运动副称为低副。
平面低副可分为转动副和移动副。
(1)转动副 若运动副只允许两构件作相对转动,则称该运动副为转动副,也称铰链。
如图所示各构件的联接就是转动副。
如果转动副的两构件之一是固定不动的,则称该转动副为固定铰链。
若转动副中两构件都是运动的,则称该转动副为活动铰链。
(2)移动副 若运动副只允许两构件沿接触面某一方向相对滑移,则称该运动副为移动副。
如图所示。
3.1.2 自由度和运动副的约束yO 12x1、构件的自由度在平面运动中,每一个独立的构件,其运动均可分为三个独立的运动,即沿x轴和y 轴的移动及在xoy平面内的转动。
构件的这三种独立的运动称为其自由度,分别用x、y及α为三个独立参数表示。
由上述可知:构件的自由度等于构件的独立运动参数。
平面内自由的构件,有3个自由度,而空间内自由的构件,有6个自由度。
2、运动副的约束当两构件通过运动副联接,任一构件的运动将受到限制,从而使其自由度减少,这种限制就称为约束。
平面机构的自由度教案第一章:平面机构的基本概念1.1 平面机构的定义介绍平面机构的定义和特点解释机构的作用和应用1.2 平面机构的组成介绍平面机构的组成要素,包括构件和连接解释不同类型的构件和连接方式1.3 平面机构的分类介绍平面机构的分类,包括单自由度机构和多自由度机构解释不同类型平面机构的特点和应用第二章:自由度的概念2.1 自由度的定义介绍自由度的概念和意义解释自由度在机构设计中的重要性2.2 自由度的计算介绍自由度的计算方法和步骤解释如何确定机构中自由度的数量2.3 自由度与约束的关系介绍自由度与约束之间的关系解释如何通过约束来控制机构的运动和稳定性第三章:平面机构的自由度计算3.1 单自由度机构的自由度计算介绍单自由度机构的自由度计算方法解释如何确定单自由度机构的自由度数量3.2 多自由度机构的自由度计算介绍多自由度机构的自由度计算方法解释如何确定多自由度机构的自由度数量3.3 自由度计算的实例分析提供实例分析,帮助学生理解和应用自由度计算方法第四章:自由度对机构运动的影响4.1 自由度与机构运动的关系介绍自由度对机构运动的影响和作用解释不同自由度机构的特点和运动方式4.2 自由度对机构稳定性的影响介绍自由度对机构稳定性的影响和作用解释如何通过自由度来控制机构的稳定性和可靠性4.3 实例分析:自由度对机构运动和稳定性的影响提供实例分析,帮助学生理解和应用自由度对机构运动和稳定性的影响第五章:自由度在机构设计中的应用5.1 自由度在机构设计中的作用介绍自由度在机构设计中的重要性和应用价值解释如何利用自由度来优化机构设计和提高性能5.2 自由度在机构创新中的运用介绍自由度在机构创新中的作用和意义解释如何利用自由度来创造新的机构设计和解决方案5.3 实例分析:自由度在机构设计中的应用提供实例分析,帮助学生理解和应用自由度在机构设计中的应用第六章:平面机构的自由度分析方法6.1 机构自由度分析的基本原理介绍机构自由度分析的基本原理和数学基础解释如何应用这些原理来分析平面机构的自由度6.2 运动链分析法介绍运动链分析法的概念和步骤解释如何利用运动链分析法来确定机构的自由度6.3 机构自由度分析的实例提供实例分析,帮助学生掌握自由度分析的方法和技巧第七章:平面机构的自由度优化设计7.1 自由度优化设计的目标介绍自由度优化设计的目标和意义解释如何在机构设计中实现自由度的优化7.2 自由度优化设计的方法介绍自由度优化设计的方法和技巧解释如何应用这些方法来提高机构的性能和效率7.3 实例分析:自由度优化设计在实际中的应用提供实例分析,帮助学生理解自由度优化设计的方法和应用第八章:平面机构的自由度控制8.1 自由度控制的概念和意义介绍自由度控制的概念和意义解释自由度控制在机构设计和应用中的重要性8.2 自由度控制的方法和技巧介绍自由度控制的方法和技巧解释如何应用这些方法来控制机构的自由度8.3 实例分析:自由度控制在实际中的应用提供实例分析,帮助学生理解自由度控制的方法和应用第九章:平面机构的自由度综合应用9.1 自由度在机构设计中的应用介绍自由度在机构设计中的应用和意义解释如何利用自由度来优化机构设计9.2 自由度在机械臂机构设计中的应用介绍自由度在机械臂机构设计中的应用和意义解释如何利用自由度来优化机械臂机构设计9.3 实例分析:自由度在机构综合应用中的实例提供实例分析,帮助学生理解自由度在机构综合应用中的方法和技巧第十章:平面机构的自由度教案总结10.1 平面机构自由度教案的回顾回顾整个教案的内容和重点强调平面机构自由度的重要性和应用价值10.2 平面机构自由度教案的实践应用鼓励学生将所学知识应用到实际机构和机械设计中强调平面机构自由度在实际工程中的重要性10.3 平面机构自由度教案的拓展学习推荐学生进一步学习的资料和资源鼓励学生探索平面机构自由度在更广泛领域中的应用重点和难点解析一、平面机构的基本概念:理解平面机构的定义、组成和分类是学习平面机构自由度的基础。
平面机构的自由度教案第一章:平面机构的基本概念1.1 平面机构的定义解释平面机构的含义,指出它是由若干个刚体通过运动副连接而成的系统。
强调平面机构在工程和技术中的应用。
1.2 刚体和运动副介绍刚体的概念,指出刚体是指在力的作用下形状和大小不发生变化的物体。
解释运动副的概念,介绍常见的运动副类型,如滑动副、转动副等。
1.3 平面机构的自由度引入自由度的概念,指出它是描述平面机构独立运动状态的数目。
解释自由度与约束的关系,指出约束越多,自由度越少。
第二章:平面机构的自由度计算2.1 平面机构的自由度计算方法介绍常用的自由度计算方法,如基于矩阵的方法和基于方程的方法。
解释基于矩阵的方法中使用的刚体矩阵和运动副矩阵的概念。
2.2 计算平面机构的自由度通过具体的例子,展示如何计算一个给定的平面机构的自由度。
强调在计算过程中要注意的问题,如运动副的配置和机构的闭合条件。
第三章:平面机构的自由度分析3.1 平面机构的自由度分析方法介绍常用的自由度分析方法,如解析法和数值法。
解释解析法的原理和步骤,强调解析法的优点和局限性。
3.2 分析平面机构的自由度通过具体的例子,展示如何对一个给定的平面机构进行自由度分析。
强调在分析过程中要注意的问题,如机构的设计优化和机构的稳定性能。
第四章:平面机构的自由度应用4.1 平面机构的自由度与机构设计解释平面机构的自由度对机构设计的重要性,指出通过调整自由度可以实现不同的运动功能。
介绍常用的机构设计方法和工具,如机构分析软件和机构设计手册。
4.2 平面机构的自由度与机构分析解释平面机构的自由度在机构分析中的应用,指出通过分析自由度可以评估机构的性能和稳定性。
介绍常用的机构分析方法和工具,如运动学分析、动力学分析和机构仿真。
第五章:平面机构的自由度实验5.1 平面机构的自由度实验目的强调实验在理解平面机构自由度的重要性,指出实验可以帮助学生直观地观察和验证自由度的概念。
介绍实验的基本要求和准备工作。
江苏汽车技师学院教案QMSD-0504-262016年9月18日 NO:教师姓名邹新升授课形式讲授授课时数 1授课日期9.22授课班级技修1421章节名称2.3 平面机构的自由度教学目的1.使学生了解自由度与约束的概念;2.使学生掌握平面机构自由度的计算方法;3.使学生并会判断机构运动的确定性。
教学重点1.平面机构自由度的计算;2.机构运动的确定性判断。
教学难点平面机构运动自由度的计算。
更新、补充内容微课视频一部。
使用教具采用多媒体课件辅助教学,节省了教学时间、增加了教学容量;使学生对抽象理论的理解更加透彻。
课外作业1.习题册第二章 2-3~2-10、2-14、2-18、2-30、2-38、2-39;2.预习:通过qq群文件PPT课件和微课视频1部;3.思考题一道。
课后分析教研组长审阅日期授课板书设计【板书设计】2.3 平面机构的自由度2.3.1自由度和约束的的概念1.自由度2.约束2.3.2平面机构自由度的计算和机构具有确定运动的条件1.平面机构自由度计算公式F=3n-2P L-P H2.机构具有确定运动的条件F>0且当F=原动件数目课题2.3 平面机构的自由度教学环节授课内容教学方法时间分配【组织教学】【旧知回顾】【复习提问】【预习检查】[导入新课][讲授新课] ◆考勤和课前准备情况,宣布上课。
◆运动副的定义及分类;机构运动简图的画法。
◆问题:1.运动副的定义是什么?2.运动副是如何分类的,分为哪几类?◆检查同学们使用微课预习情况,询问学生从微课视频中总结出的知识点有哪些?2.3 平面机构的自由度2.3.1自由度和约束的的概念1.自由度运动构件相对于参考系所具有的独立运动的数目称为构件的自由度。
任一做平面运动的自由构件都具有三个独立的运动,如图2-8所示,XOY坐标系中的构件可沿X轴和Y轴移动,可绕垂直于XOY平面的轴线A转动,因此做平面运动的自由构件有三个自由度。
图2-82.约束当两构件组成运动副后,它们之间的某些相对运动收到限制,对于相对运动所加的限制称为约束。
平面机构的自由度教案一、教学目标1.了解平面机构的定义和基本概念;2.掌握平面机构的自由度的概念和计算方法;3.掌握平面机构自由度的计算公式,并能够运用到实际问题中。
二、教学重点1.平面机构的定义和基本概念;2.平面机构自由度的概念和计算方法。
三、教学难点1.平面机构自由度的计算公式;2.如何应用平面机构自由度的计算公式解决实际问题。
四、教学准备1.多媒体设备;2.教学课件;3.示意图;4.计算实例。
五、教学过程1.导入(5分钟)通过一个简单的机械结构示意图,引起学生的兴趣,并引出平面机构自由度的概念。
2.知识讲解(15分钟)1)平面机构的定义:平面机构是由多个刚体通过铰链、滑动副等连接件连接而成,使得其中至少一个刚体较其他刚体有较多的运动自由度的机构。
2)平面机构自由度的定义:平面机构自由度是指机构中一些刚体相对于其他刚体的允许的自由运动的数量。
3)平面机构自由度的计算方法:a.单铰链机构:自由度=3n-m,其中n为零件数,m为约束数。
b.单滑块机构:自由度=3n-m+2,其中n为零件数,m为约束数。
c.混合机构:分别计算铰链和滑块的自由度,然后求和。
3.例题演练(30分钟)设计一个闭链机构,由4个杆件和4个铰链连接而成,其中两个杆件固定在平面上,另外两个杆件可以绕着铰链件旋转。
计算该闭链机构的自由度。
解:零件数n=4,约束数m=4,根据自由度的计算公式,自由度=3n-m=3×4-4=8-4=44.拓展应用(25分钟)请设计一个能够固定在地面上的四杆机构,其中一个杆件固定,两个杆件可绕铰链旋转,一个杆件可绕滑块旋转。
根据题目要求,计算该机构的自由度。
解:零件数n=4,约束数m=6,根据自由度的计算公式,自由度=3n-m=3×4-6=12-6=65.归纳总结(5分钟)通过例题的演练,复习和巩固了平面机构自由度的计算方法,并对平面机构的自由度有了更深入的理解。
六、课堂小结通过本节课的学习,我们了解了什么是平面机构,学会了如何计算平面机构的自由度,并通过例题的演练,掌握了自由度的计算方法的运用。
平面机构的自由度教案
邓晓娜01机电
第七周星期一第六节2004年月10月11日平面机构的自由
、让学生初步理解平面机构自由度的计算公、学会运用公式进行平面机构自由度的计
、学会应用检验平面机构自由度的条
平面机构自由度的计平面机构自由度的计讲授教学方
教具使黑板、各色粉
教学说
一、导
老师:同学们,你们对“自由”这个词有什么看法教师引
(学生讨论、回答
老师:在我们学习的机构上,一个作平面运动的自由构件,它可
做怎么样的自由运动呢二、讲授新
(一)预习新分钟学生看
板(二)自由度的定
过板图讲解
程板书处于平面内的自由构件,有三种自由运动:
向x轴方向运动
向y 轴方向运动
绕某一点转动。
三个自由度引出:一个作平面运动的自由机构具有
板书
-2x40=1 -Ph=3x3--F=3n解:2Pl (七)自由度的检验条件
F=W原动件数
2x4-0=1 解:F=3n-2Pl-Ph=3x3-F=W=1 成立
教师小结三:课堂小结1、自由度的定义;;Ph2、自由度的计算公式:F=3n -2Pl-、机构自由度的计算;3 、检验机构自由度的条件。
4
标题
自由度的定义自由度的计算公式各类型运动板书例子副所引入的约束的定义设计检验公式约束运动副的分类
例子
作业布置将课堂上做的两个例子再做一遍教的计算平面机构自由计时应注意的问题P127课后预习学
后注意学生的反应,注意他们对计算例题是否笔随记感兴趣?。
教案平面机构的自由度 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
平面机构的自由度
【教学目的】
1、掌握运动链成为机构的条件。
2、熟练掌握机构自由度的计算方法。
能自如地运用自由度计算公式计算机构自由度,尤其是平面机构的自由度。
【教学内容】
1、引出自由度的概念,明确自由度和约束的关系;
2、推导自由度计算公式,并加以举例说明;
3、学会利用公式计算平面机构的自由度。
【教学重点和难点】
1、机构自由度的计算
【教学方法】
1、课堂以讲授为主,结合实物文件进行分析讲解。
2、注重师生交流,提倡师生互动,上课时细心观察学生的反应,课间与学生交谈,了解学生的掌握情况,根据反馈的信息,适当地调整授课内容和方法等。
【教学内容】
1、概念:平面机构的自由度——机构具有确定运动的独立运动参数称为机
构的自由度。
2、自由度的引入
构件的独立运动称为自由度。
一个作平面运动的自由构件具有3个独立的运动,见图1。
图1 平面自由度
即沿x轴、y轴移动及绕垂直于xoy面的轴线的转动。
构件组成运动副后,其运动就受到了约束,其自由度数随之减少,不同类型的运动副带来的约束不同。
如图2移动副中,限制了2相对1沿垂直于导路的移动及相对限制转动,引入两个约束。
如图3中转动副限制了2相限制1沿x 轴y 轴移动,引入两个约束。
如图4高副中,限制了2相对1沿法线轴的移动,引入一个约束。
图4 高副及表示符号
3 自由度公式的推导
如设平面机构共有n 个活动构件(不包括机架),当此机构的各构件尚未通过运动副联接时,显然它们共有3n 个自由度。
当两构件构成运动副之后,它们的运动就将受到约束,其自由度将减少,假设各构件间共构成了L p 个低副和H p 个高副,自由度减少的数目等于运动副引入的约束(H L p p +2)。
于是,该机构的自由度应为
()H L H L p p n p p n F --=+-=2323 (1)
4 自由度的计算
图5 平面四连杆机构 图6 平面五连杆机构
(1)三个活动构件,四个低副,零个高副。
⨯
⨯
=
F
-
-
3=
4
1
2
3
(2)四个活动构件,五个低副,零个高副
F
342502
总结:
平面机构自由度的计算是教学中的重点和难点,计算自由度时需要找准活动构件的个数,注意低副和高副的约束,然后进行计算。