单闭环直流调速工作原理
- 格式:pptx
- 大小:1.34 MB
- 文档页数:11
单闭环直流调速系统是一种常见的控制系统,用于控制直流电机的转速。
以下是单闭环直流调速系统的基本组成和工作原理:
基本组成:
1. 直流电机:负责将电能转换为机械能。
2. 编码器或传感器:用于测量电机的实际转速。
3. 控制器:通常使用PID控制器,根据实际转速和设定转速之间的误差进行调节。
4. 功率放大器:将控制器输出的信号放大后送至电机,控制电机的转速。
工作原理:
1. 测量阶段:编码器或传感器测量电机的实际转速,并将这个信息反馈给控制器。
2. 比较阶段:控制器将实际转速与设定的目标转速进行比较,计算出误差值。
3. 控制阶段:根据误差值,控制器通过PID算法计算出控制信号,控制电机的转速。
4. 执行阶段:功率放大器根据控制信号控制电机的转速,使实际转速逐渐接近设定转速。
调速过程:
-如果实际转速低于设定转速,控制器会增加电机的供电,使电机加速。
-如果实际转速高于设定转速,控制器会减小电机的供电,使电机减速。
-控制器通过不断地调整电机的供电,使得实际转速稳定在设定的目标转速附近。
通过单闭环直流调速系统,可以实现对直流电机转速的精确控制,广泛应用于工业生产中的传动系统、自动化设备等领域。
单闭环直流调速电路
单闭环直流调速电路是一种用于调整电机转速的电路。
它的基本原理是通过改变电机的电压或电流来调整电机的转速。
该电路由两个闭环组成:电压反馈环和转速反馈环。
在电压反馈环中,电路通过测量电机的输出电压来调整电机的电压。
当输出电压高于设定值时,电路会降低电机的电压,使输出电压回到设定值。
当输出电压低于设定值时,电路会增加电机的电压,使输出电压回到设定值。
这样就可以实现对电机输出电压的精确控制。
在转速反馈环中,电路通过测量电机的转速来调整电机的电压或电流。
当转速低于设定值时,电路会增加电机的电压或电流,以提高电机的转速。
当转速高于设定值时,电路会降低电机的电压或电流,以降低电机的转速。
这样就可以实现对电机转速的精确控制。
单闭环直流调速电路可以应用于许多场合,如工业生产、交通运输等领域。
它可以提高电机的效率和运行稳定性,同时降低电机噪声和损耗,从而提高设备的运行效率和寿命。
单闭环直流调速系统实验报告单闭环直流调速系统实验报告一、引言直流调速系统是现代工业中常用的一种电机调速方式。
本实验旨在通过搭建单闭环直流调速系统,探究其调速性能以及对电机转速的控制效果。
二、实验原理单闭环直流调速系统由电机、编码器、电流传感器、控制器和功率电路等组成。
电机通过功率电路接受控制器的指令,实现转速调节。
编码器用于测量电机转速,电流传感器用于测量电机电流。
三、实验步骤1. 搭建实验电路:将电机、编码器、电流传感器、控制器和功率电路按照实验原理连接起来。
2. 调试电机:通过控制器设置电机的运行参数,如额定转速、最大转矩等。
3. 运行实验:根据实验要求,设置不同的转速指令,观察电机的响应情况。
4. 记录实验数据:记录电机的转速、电流等数据,并绘制相应的曲线图。
5. 分析实验结果:根据实验数据,分析电机的调速性能和控制效果。
四、实验结果分析1. 转速响应特性:通过设置不同的转速指令,观察电机的转速响应情况。
实验结果显示,电机的转速随着指令的变化而变化,且响应速度较快。
2. 稳态误差分析:通过观察实验数据,计算电机在不同转速下的稳态误差。
实验结果显示,电机的稳态误差较小,说明了系统的控制效果较好。
3. 转速控制精度:通过观察实验数据,计算电机在不同转速下的控制精度。
实验结果显示,电机的转速控制精度较高,且随着转速的增加而提高。
五、实验总结本实验通过搭建单闭环直流调速系统,探究了其调速性能和对电机转速的控制效果。
实验结果表明,该系统具有较好的转速响应特性、稳态误差较小和较高的转速控制精度。
然而,实验中也发现了一些问题,如系统的抗干扰能力较弱等。
因此,在实际应用中,还需要进一步优化和改进。
六、展望基于本实验的结果和问题,未来可以进一步研究和改进单闭环直流调速系统。
例如,可以提高系统的抗干扰能力,提升转速控制的稳定性和精度。
同时,还可以探索其他调速方式,如双闭环调速系统等,以满足不同的工业应用需求。

实验三-单闭环不可逆直流调速系统实验一、实验目的本实验旨在通过实验研究单闭环不可逆直流调速系统的基本原理、调速特性和调速方法,掌握闭环调速的基本思想和方法,熟悉DC电机的调速控制原理和方法。
二、实验原理在单闭环不可逆直流调速系统中,电机的速度调节采用PID控制方式,通过控制电机的电源电压来实现调速。
具体的原理如下:1.电机的动作原理:当电枢通电后,电枢周围会产生一个磁场,同时在电枢内产生一个磁场,这两个磁场互相作用产生力矩,从而将电枢带动转动。
2.电机的调速控制:通过改变电机的电源电压来实现对电机的调速控制,电源电压越高,电机的转速越快,电源电压越低,电机的转速越慢。
而电源电压的改变通常是通过PWM调制实现的。
3.PID算法:PID控制算法采用比例、积分、微分三种控制信号结合的方式实现对电机转速的控制。
比例控制用于实时调整电机转速,积分控制用于修正电机转速下降过程中的偏差,微分控制用于提高系统的动态响应速度。
三、实验步骤1.将实验电路图搭建好,并连接好电源、电机、PWM信号发生器等模块。
2.对电机进行标定:通过对电机的空载转速和负载转速进行测量,确定电机传动系数和最大负载系数。
3.进行调速实验:通过修改PWM信号发生器的占空比来改变输入电压,从而实现对电机速度的控制。
同时通过示波器和万用表实时对电流、转速、电压等参数进行测量与记录。
4.使用PID算法对电机进行调速控制,对比比例控制、积分控制、微分控制和PID控制四种方法的效果和优缺点。
四、实验结果与分析实验中我们对电机的标定得到了电机的传动系数约为0.0134,最大负载系数为0.39。
在进行调速实验时,我们可以明显地感受到PWM信号发生器占空比的改变会对电机的转速产生影响。
同时通过测量和记录不同占空比下的电流、转速、电压等参数,我们可以得到调速系统的调速特性曲线。
通过加入PID算法,我们可以明显地感受到PID控制的稳定性和动态性,相比其他三种控制方法,PID控制能够更快速地达到稳定状态,同时产生的超调也更小。
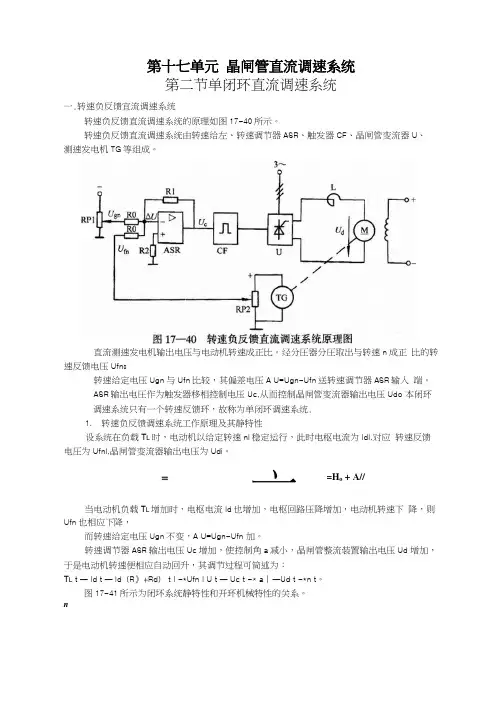
第十七单元 晶闸管直流调速系统第二节单闭环直流调速系统一.转速负反馈宜流调速系统转速负反馈直流调速系统的原理如图17-40所示。
转速负反馈直流调速系统由转速给左、转速调节器ASR 、触发器CF 、晶闸管变流器U 、 测速发电机TG 等组成。
直流测速发电机输出电压与电动机转速成正比。
经分圧器分圧取出与转速n 成正 比的转速反馈电压Ufn 0转速给定电压Ugn 与Ufn 比较,其偏差电压A U=Ugn-Ufn 送转速调节器ASR 输入 端。
ASR 输出电圧作为触发器移相控制电压Uc,从而控制晶闸管变流器输出电压Udo 本闭环调速系统只有一个转速反馈环,故称为单闭环调速系统.1. 转速负反馈调速系统工作原理及其静特性设系统在负载T L 时,电动机以给定转速nl 稳定运行,此时电枢电流为Idl,对应 转速反馈电圧为Ufnl,晶闸管变流器输出电压为Udi 。
当电动机负载T L 增加时,电枢电流Id 也增加,电枢回路压降增加,电动机转速下 降,则Ufn 也相应下降, 而转速给定电压Ugn 不变,A U=Ugn-Ufn 加。
转速调节器ASR 输出电压Uc 增加,使控制角a 减小,晶闸管整流装置输出电压Ud 增加,于是电动机转速便相应自动回升,其调节过程可简述为:T L t — Id t — ld (R 》+Rd ) t I -*Ufn I U t — Uc t -* a | —Ud t -*n t 。
图17-41所示为闭坏系统静特性和开环机械特性的关系。
n亠 =H o + A//图17—41闭环系统静特性和开环机械特性的关系.图中①②③④曲线是不同Ud之下的开环机械特性。
假设当负载电流为Idl时,电动机运行在曲线①机械特性的A点上。
当负载电流增加为Id2时,在开环系统中由于Ugn不变,晶闸管变流器输出电压Ud 也不会变,但由丁•电枢电流Id增加,电枢回路压降增加,电动机转速将由A点沿着曲线①机械特性下降至&点,转速只能相应下降。
单闭环直流调速系统简介单闭环直流调速系统是一种常见的电气传动系统,广泛应用于工业生产和机械控制领域。
该系统通过调节直流电机的电压和电流来实现对电机转速的精确控制。
本文将介绍单闭环直流调速系统的原理、主要组成部分以及工作原理。
原理单闭环直流调速系统的基本原理是通过调节电机的励磁电流和电压来改变电机的转速。
系统的闭环反馈控制可以实现对电机转速的精确控制。
具体的原理如下:1.转速测量:系统中通过安装转速传感器来测量电机的实时转速,并将测量值反馈给控制器。
2.错误计算:系统将设定的目标转速与实际转速进行比较,计算出误差值。
3.控制信号产生:根据误差值,系统控制器生成相应的调节信号。
4.调节信号传递:调节信号通过控制器输出,传递给电机的调速装置。
5.电机调速:电机的调速装置根据控制信号调整电机的电压和电流,从而实现对电机转速的控制。
组成部分单闭环直流调速系统主要包含以下几个组成部分:1.电机:直流电机是该系统的驱动设备,通过调整电机的电压和电流来实现转速控制。
2.电源:系统需要一个恒定的直流电源供应电机运行,并提供所需的电压和电流。
3.调速装置:调速装置是控制电机电压和电流的关键设备,通过改变输出电压和电流的大小来实现对电机转速的控制。
4.转速传感器:转速传感器用于测量电机的实际转速,并将测量值反馈给控制系统。
5.控制器:控制器是系统的核心部分,负责计算误差值并生成相应的调节信号。
6.显示器:显示器用于实时显示电机的转速和控制参数。
工作原理当系统启动时,电机会按照设定的初始转速开始运行。
转速传感器会实时测量电机的转速,并将测量值传递给控制器。
控制器根据设定的目标转速和实际转速计算出误差值。
控制器通过对误差值进行计算和处理,生成相应的调节信号。
调节信号经过控制器输出,传递给电机的调速装置。
调速装置根据调节信号调整电机的电压和电流,使电机的转速向目标转速靠近。
系统会周期性地重复上述过程,不断进行误差计算和调节信号生成,从而实现对电机转速的精确控制。

带电流截止负反馈的转速单闭环直流调速系统的设计和仿真1.设计原理带电流截止负反馈的转速单闭环直流调速系统由速度反馈环和电流反馈环组成。
其基本原理是,通过测量电机驱动器的输出转速,并与给定的转速进行比较,从而产生误差信号。
误差信号经过比例、积分和微分三个环节进行处理后,作为电机驱动器的控制量,用于调节电机的输入电压。
具体的设计步骤如下:(1)确定电机的调速要求和性能指标,包括稳态误差、调速范围、动态响应时间等。
(2)根据电机的参数和特性曲线,确定理想的速度控制系统传递函数。
(3)选择合适的调节器类型和参数,并确定反馈信号的获取方式。
(4)设计速度环和电流环的控制回路,包括比例、积分和微分环节的参数设置。
(5)进行系统稳态和动态性能的仿真和分析。
2.仿真过程在进行仿真前,需要先确定电机的参数和特性曲线,并建立相应的数学模型。
然后,在Simulink等软件中搭建整个调速系统的模型。
具体步骤如下:(1)根据电机的特性曲线确定电机的传递函数模型,例如:Gs=1/(Js+B)其中,Gs为电机的机械转速传递函数,J为转动惯量,B为阻尼系数。
(2)设计速度环的控制回路,包括比例环节、积分环节和微分环节。
通常采用PID控制器,其传递函数为:Gc=Kp+Ki/s+Kd*s其中,Kp、Ki和Kd分别为比例、积分和微分环节的增益。
(3)设计电流环的控制回路,采用电流截止负反馈的方式。
电流环的控制器传递函数为:Gc=Kc*(1+s*Rf)其中,Kc为增益,Rf为电流截止反馈的滤波器。
(4)将速度环和电流环相连接,构成整个闭环控制系统。
(5)进行系统的仿真,观察系统的稳态和动态响应,并根据需要进行参数调整和优化。
3.仿真结果和分析根据以上步骤进行仿真后,可以得到系统的稳态和动态响应曲线。
通过观察和分析这些曲线,可以评估系统的性能和效果。
首先,可以通过误差曲线来评估系统的稳态性能,即在给定转速下是否存在稳态误差。
如果误差较大,需要调整PID控制器的参数来改善系统的稳定性。
学号:中州大学电机及拖动课程设计题目:转速负反馈的单闭环直流调速系统的设计姓名:专业:电气自动化班级:指导老师:赵静2014年6月10号摘要该设计是转速负反馈的单闭环直流调速系统,目前调速系统分为交流调速和直流调速系统,由于直流调速系统的调速范围广、静差率小、稳定性好以及具有良好的动态性能,因此在相当长的时间内,高性能的调速系统几乎都采用直流调速系统,为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统,对调速指标要求不高的场合,采用单闭环系统,按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速负反馈单闭环使用较多。
在设计中用MATLAB 软件对电流环和转速环的设计举例进行了仿真,通过比较说明了直流调速系统的特性。
关键字:转速负反馈动态性能ABSTRACThe design speed negative feedback is single closed-loop dc speed regulating system, the current speed regulation system is divided into ac speed regulation and dc speed control system, due to the wide scope of speed control of dc speed regulating system, small static rate, good stability and has a good dynamic performance, so in a long time, almost all high performance speed control system using dc speed regulating system, in order to improve the dynamic and static performance of dc speed regulating system, usually adopts closed loop control system, the control of motor speed index requirements is not high, the single closed loop system, according to the feedback in different ways can be divided into the speed feedback, current feedback, voltage feedback, etc.In a single closed-loop system, speed closed-loop used more negative feedback ing MATLAB software in your design, for example, the design of current loop and speed loop are simulated, through comparing the characteristics of thedc speed control systeKEYWORDS:SPEED BACK MATLAB D 目录摘要 (I)Abstract..........................................II I 1转速负反馈单闭环直流调速系的电路.. (1)1.1单闭环直流调速系统原理 (2)1.2调节器的设计 (4)1.3 调节器的计算 (5)2转速控制的要求和调速指标 (6)2.1单闭环调速系统的调速范围以及静差率 (5)2.2反馈控制规律 (6)3转速负反馈单闭环直流调速的特性分析 (11)3.1静态性能分析 (9)3.2动态性能分析 (11)4 电路设计 (12)4 .1 触发电路的选择 (13)5心得体会 (14)6致谢词 (15)7参考文献 (16)1转速负反馈单闭环直流调速系的电路1.1单闭环直流调速系统原理.根据本设计要求,设计的系统为转速负反馈单闭环直流调速系统,其中转速为负反馈量。
单闭环直流调速系统的基本工作原理系统的基本原理是根据电机的实际转速和设定转速之间的误差,通过调节电源电压来控制电机的转速,使实际转速与设定转速保持一致。
具体工作过程可以分为以下几个阶段:
1.电源输入:将交流电源转换为直流电源供给电机。
交流电源经过整流电路,将交流电转换为直流电。
2.电流控制:通过变阻器来改变电压,调节电阻的大小,从而控制直流电机的输入电流。
当电阻增大时,电机的输入电流减小,反之亦然。
3.转速检测:通过转速传感器测量电机的实际转速,并将测量值与设定值进行比较,计算出转速的误差。
转速传感器通常是使用光电传感器或霍尔传感器等。
4.控制器:根据转速误差来调节电机输入电压。
控制器可以是模拟控制器或数字控制器,根据系统的要求来选择。
控制器通过与电机控制电路相连,从而控制电机的输出。
5.输出功率:经过调整电源电压后,电机输出的功率与实际负载相匹配。
控制电路会根据设定值和转速误差来调节电机输出的功率,使其尽可能接近设定值。
总结起来,单闭环直流调速系统的基本原理是通过将交流电源转换为直流电源,通过调节电压来控制电机的输入电流,利用转速传感器测量实际转速并与设定值比较,然后通过控制器调节电机的输入电压,使实际转速与设定转速之间的误差尽可能减小。
通过这种方式,可以实现对直流电机的调速控制,适应不同负载要求和工作条件。