第二章 单闭环直流调速系统
- 格式:ppt
- 大小:483.50 KB
- 文档页数:28
单闭环直流调速系统是一种常见的控制系统,用于控制直流电机的转速。
以下是单闭环直流调速系统的基本组成和工作原理:
基本组成:
1. 直流电机:负责将电能转换为机械能。
2. 编码器或传感器:用于测量电机的实际转速。
3. 控制器:通常使用PID控制器,根据实际转速和设定转速之间的误差进行调节。
4. 功率放大器:将控制器输出的信号放大后送至电机,控制电机的转速。
工作原理:
1. 测量阶段:编码器或传感器测量电机的实际转速,并将这个信息反馈给控制器。
2. 比较阶段:控制器将实际转速与设定的目标转速进行比较,计算出误差值。
3. 控制阶段:根据误差值,控制器通过PID算法计算出控制信号,控制电机的转速。
4. 执行阶段:功率放大器根据控制信号控制电机的转速,使实际转速逐渐接近设定转速。
调速过程:
-如果实际转速低于设定转速,控制器会增加电机的供电,使电机加速。
-如果实际转速高于设定转速,控制器会减小电机的供电,使电机减速。
-控制器通过不断地调整电机的供电,使得实际转速稳定在设定的目标转速附近。
通过单闭环直流调速系统,可以实现对直流电机转速的精确控制,广泛应用于工业生产中的传动系统、自动化设备等领域。
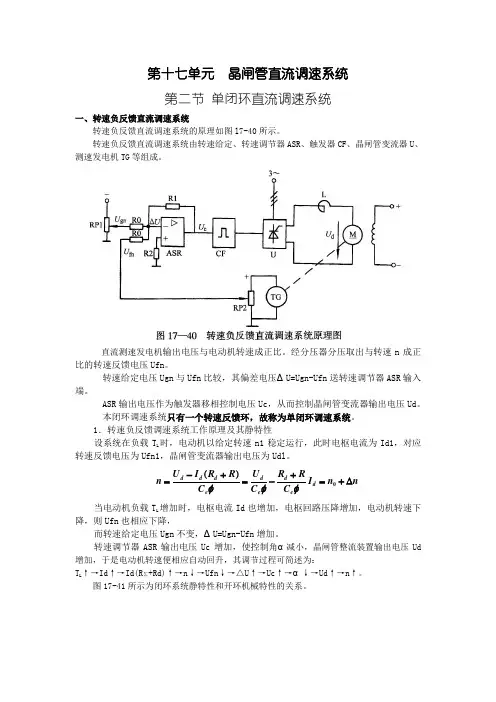
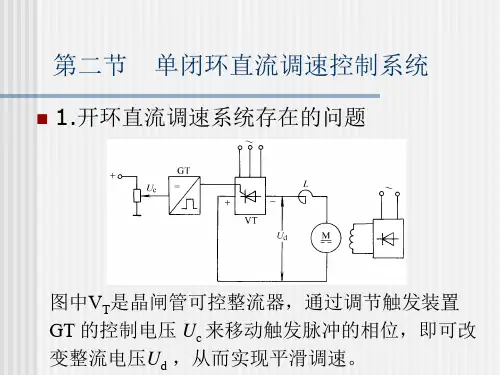
第十七单元 晶闸管直流调速系统第二节 单闭环直流调速系统一、转速负反馈直流调速系统转速负反馈直流调速系统的原理如图l7-40所示。
转速负反馈直流调速系统由转速给定、转速调节器ASR 、触发器CF 、晶闸管变流器U 、测速发电机TG 等组成。
直流测速发电机输出电压与电动机转速成正比。
经分压器分压取出与转速n 成正比的转速反馈电压Ufn 。
转速给定电压Ugn 与Ufn 比较,其偏差电压ΔU=Ugn-Ufn 送转速调节器ASR 输入端。
ASR 输出电压作为触发器移相控制电压Uc ,从而控制晶闸管变流器输出电压Ud 。
本闭环调速系统只有一个转速反馈环,故称为单闭环调速系统。
1.转速负反馈调速系统工作原理及其静特性设系统在负载T L 时,电动机以给定转速n1稳定运行,此时电枢电流为Id1,对应转速反馈电压为Ufn1,晶闸管变流器输出电压为Udl 。
n n I C R R C U C R R I U n d e d e d e d d d ∆+=+-=+-=0)(φφφ 当电动机负载T L 增加时,电枢电流Id 也增加,电枢回路压降增加,电动机转速下降,则Ufn 也相应下降,而转速给定电压Ugn 不变,ΔU=Ugn-Ufn 增加。
转速调节器ASR 输出电压Uc 增加,使控制角α减小,晶闸管整流装置输出电压Ud 增加,于是电动机转速便相应自动回升,其调节过程可简述为:T L ↑→Id ↑→Id(R ∑+Rd)↑→n ↓→Ufn ↓→△U↑→Uc ↑→α↓→Ud ↑→n ↑。
图17-41所示为闭环系统静特性和开环机械特性的关系。
图中①②③④曲线是不同Ud之下的开环机械特性。
假设当负载电流为Id1时,电动机运行在曲线①机械特性的A点上。
当负载电流增加为Id2时,在开环系统中由于Ugn不变,晶闸管变流器输出电压Ud 也不会变,但由于电枢电流Id增加,电枢回路压降增加,电动机转速将由A点沿着曲线①机械特性下降至B’点,转速只能相应下降。

单闭环直流调速系统简介单闭环直流调速系统是一种常见的电气传动系统,广泛应用于工业生产和机械控制领域。
该系统通过调节直流电机的电压和电流来实现对电机转速的精确控制。
本文将介绍单闭环直流调速系统的原理、主要组成部分以及工作原理。
原理单闭环直流调速系统的基本原理是通过调节电机的励磁电流和电压来改变电机的转速。
系统的闭环反馈控制可以实现对电机转速的精确控制。
具体的原理如下:1.转速测量:系统中通过安装转速传感器来测量电机的实时转速,并将测量值反馈给控制器。
2.错误计算:系统将设定的目标转速与实际转速进行比较,计算出误差值。
3.控制信号产生:根据误差值,系统控制器生成相应的调节信号。
4.调节信号传递:调节信号通过控制器输出,传递给电机的调速装置。
5.电机调速:电机的调速装置根据控制信号调整电机的电压和电流,从而实现对电机转速的控制。
组成部分单闭环直流调速系统主要包含以下几个组成部分:1.电机:直流电机是该系统的驱动设备,通过调整电机的电压和电流来实现转速控制。
2.电源:系统需要一个恒定的直流电源供应电机运行,并提供所需的电压和电流。
3.调速装置:调速装置是控制电机电压和电流的关键设备,通过改变输出电压和电流的大小来实现对电机转速的控制。
4.转速传感器:转速传感器用于测量电机的实际转速,并将测量值反馈给控制系统。
5.控制器:控制器是系统的核心部分,负责计算误差值并生成相应的调节信号。
6.显示器:显示器用于实时显示电机的转速和控制参数。
工作原理当系统启动时,电机会按照设定的初始转速开始运行。
转速传感器会实时测量电机的转速,并将测量值传递给控制器。
控制器根据设定的目标转速和实际转速计算出误差值。
控制器通过对误差值进行计算和处理,生成相应的调节信号。
调节信号经过控制器输出,传递给电机的调速装置。
调速装置根据调节信号调整电机的电压和电流,使电机的转速向目标转速靠近。
系统会周期性地重复上述过程,不断进行误差计算和调节信号生成,从而实现对电机转速的精确控制。
单闭环直流调速课程设计一、课程目标知识目标:1. 学生能理解单闭环直流调速系统的基本原理,掌握其数学模型及相关理论知识。
2. 学生能描述单闭环直流调速系统中各个环节的作用,如电源、电机、传感器和调节器等。
3. 学生能解释单闭环直流调速系统中调速参数对系统性能的影响。
技能目标:1. 学生能运用所学知识,设计简单的单闭环直流调速系统,并进行仿真或实验。
2. 学生能分析单闭环直流调速系统的性能,通过调整参数优化系统性能。
3. 学生能熟练使用相关仪器和设备,进行单闭环直流调速系统的调试和故障排除。
情感态度价值观目标:1. 学生通过课程学习,培养对电力电子技术及其应用的兴趣,增强对工程技术学习的热情。
2. 学生能认识到单闭环直流调速系统在现代工业中的重要作用,增强社会责任感和使命感。
3. 学生在团队协作中,培养沟通、合作能力和批判性思维,形成严谨、务实的科学态度。
本课程针对高年级电气工程及其自动化专业学生,结合课程性质、学生特点和教学要求,将课程目标分解为具体的学习成果。
旨在使学生掌握单闭环直流调速系统的基本理论和实践技能,为后续专业课程学习和工程实践打下坚实基础。
二、教学内容1. 单闭环直流调速系统概述:介绍单闭环直流调速系统的基本概念、原理和应用领域。
- 教材章节:第1章 单闭环直流调速系统概述2. 单闭环直流调速系统的数学模型:讲解电机的数学模型、调节器的数学模型以及整个系统的传递函数。
- 教材章节:第2章 单闭环直流调速系统的数学模型3. 单闭环直流调速系统的调速性能分析:分析调速系统的主要性能指标,如稳态性能、动态性能等。
- 教材章节:第3章 单闭环直流调速系统的调速性能分析4. 单闭环直流调速系统的设计方法:介绍系统设计步骤、参数计算方法以及系统仿真与实验。
- 教材章节:第4章 单闭环直流调速系统的设计方法5. 单闭环直流调速系统的优化与调试:讨论如何通过调整参数优化系统性能,以及系统调试方法。
1.直流调速系统的动态指标对于一个调速系统,电动机要不断地处于启动、制动、反转、调速以及突然加减负载的过渡过程,此时,必须研究相关电机运行的动态指标,如稳定性、快速性、动态误差等。
这对于提高产品质量和劳动生产率,保证系统安全运行是很有意义的。
(1)跟随指标:系统对给定信号的动态响应性能,称为“跟随”性能,一般用最大超调量σ,超调时间t和震荡次数N三个指标来衡量,图s2.1是突加给定作用下的动态响应曲线。
最大超调量反映了系统的动态精度,超调量越小,则说明系统的过渡过程进行得平稳。
不同的调速系统对最大超调量的要求也不同。
一般调速系统σ可允许10%~35%;轧钢机中的初轧机要求小于10%,连轧机则要求小于2%~5%,;而在张力控制的卷曲机反映了系统的快速性。
系统(造纸机),则不允许有超调量。
调整时间ts为0.2s~0.5s,造纸机为0.3s。
振荡次数也反映了系统的例如,连轧机ts稳定性。
例如,磨床等普通机床允许震荡3次,龙门刨及轧机则允许振荡1次,而造纸机不允许有振荡。
图2.1突加给定作用下的动态响应曲线(2)抗扰指标:对扰动量作用时的动态响应性能,称为“抗扰”性能。
一般用最大动态速降Δnmax ,恢复时间tf和振荡次数N三个指标来衡量。
用图2.2是突加负载时的动态响应曲线。
最大动态速降反映了系统抗扰动能力和系统的稳定性。
由于最大动态速降及扰动量的大小是有关的,因此必须同时注明扰动量的大小。
恢复时间反映了系统的抗扰动能力和快速性。
振荡次数N同样代表系统的稳定性及抗扰动能力图2.2突加负载时的动态响应曲线2.晶闸管电动机直流调速系统存在的问题图2.3 V-M系统的运行范围晶闸管整流器也有它的缺点。
首先,由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
由半控整流电路构成的V-M 系统只允许单象限运行(图2.3a),全控整流电路可以实现有源逆变,允许电动机工作在反转制动状态,因而能获得二象限运行(图2.3b)。