(优选)航天器动力学基本轨道
- 格式:ppt
- 大小:800.50 KB
- 文档页数:29
航天器的轨道运行原理航天器的轨道运行原理是指航天器在宇宙空间中绕行行星或其他大型天体运动的原理。
航天器需要依靠恰当的速度和角度来保持在特定轨道上运行,以实现航天任务的目标。
本文将详细介绍航天器的轨道运行原理以及相关的概念和应用。
一、轨道的基本概念在开始探讨航天器的轨道运行原理之前,我们先来了解一些基本概念。
1. 地心引力:地球作为一个质量大的天体具有引力,是使航天器保持在运行轨道上的主要因素。
2. 轨道:轨道是航天器在宇宙空间中运行的路径,它可以是圆形、椭圆形或其他形状。
3. 轨道半径:轨道半径是航天器离地心的平均距离,通常以地球半径为基准。
4. 轨道周期:轨道周期是航天器完成一次绕行行星或其他天体所需的时间。
5. 速度:航天器在轨道上的运行速度是保持在轨道上的关键因素之一。
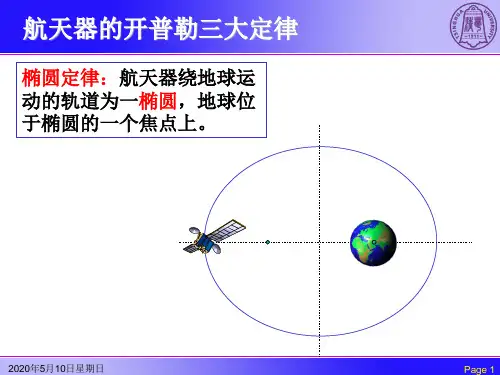
二、开普勒定律与航天器轨道开普勒定律是描述行星轨道运动的基本定律,同样也适用于航天器的轨道运行。
1. 第一定律(椭圆轨道定律):航天器绕行行星的轨道是一个椭圆,行星位于椭圆的一个焦点上。
2. 第二定律(面积定律):航天器在相同时间内扫过的面积相等,也即航天器在轨道不同位置具有不同的速度。
3. 第三定律(调和定律):航天器的轨道周期的平方与轨道半径的立方成正比。
三、航天器轨道的基本类型根据轨道半径和速度的不同,航天器的轨道可以分为以下几种基本类型。
1. 地球同步轨道(Geostationary Orbit,GEO):位于地球赤道平面上,轨道半径约为地球半径的6.6倍,轨道周期为24小时。
2. 近地轨道(Low Earth Orbit,LEO):轨道半径较小,通常在几百到几千千米之间,轨道周期为数小时。
3. 极地轨道(Polar Orbit):轨道平面与地球赤道垂直,可实现对全球各地区的观测,轨道周期与轨道高度有关。
4. 太阳同步轨道(Sun-Synchronous Orbit,SSO):轨道平面绕地球北极或南极轴旋转,每天大约绕地球一周。
飞行器在重力场中的轨迹与动力学飞行器的运动轨迹及动力学是航空工程中重要的研究领域之一。
在地球上,飞行器要克服地球的重力及其他空气动力学问题,以实现安全、平稳和高效的飞行。
本文将从飞行器运动学及动力学两个方面探讨飞行器在重力场中的轨迹与运动特性。
飞行器的运动轨迹可以分为直线飞行和曲线飞行两大类。
直线飞行是指飞行器按照一条直线飞行,这种飞行适用于长距离的航空运输;曲线飞行则是飞行器按照一定的曲线路径进行飞行,如盘旋、螺旋等。
无论是直线飞行还是曲线飞行,飞行器的运动均受到重力的影响。
在直线飞行中,飞行器需要消耗一定的燃料,以克服重力的作用,保持稳定的水平飞行状态。
此时,重力是飞行器运动的主要阻力,飞行器通过推力产生的升力来克服重力的作用。
通过调节推力的大小,飞行器可以保持稳定的飞行高度。
这种情况下,飞行器的轨迹为一条直线,但其速度、高度和姿态可以根据航空器的设计和需要进行调整。
在曲线飞行中,飞行器需要克服不仅是重力,还有其他的动力学问题。
例如,在盘旋飞行中,飞行器需要通过加大升力,以克服地球的重力,并保持相对较小的速度,以保持飞行的平稳性。
在螺旋飞行中,飞行器还要考虑转向动力和向心力的作用,以保持曲线飞行的平稳性。
飞行器的动力学也是研究的重要领域之一。
动力学主要涉及飞行器的加速度、速度和力学特性。
在重力场中,飞行器的加速度主要受到推力和重力的作用。
推力越大,加速度越大,飞行器的速度增加;重力越大,加速度越小,飞行器的速度减小。
通过调节推力和重力的平衡,飞行器可以实现不同的飞行速度。
飞行器的速度与力学特性也与其设计和用途有关。
例如,民用飞机的速度一般较低,主要用于大范围的空中交通运输;而军用战斗机的速度较快,主要用于提供战斗支持和战术优势。
此外,飞行器的力学特性还涉及其机翼和舵面的设计,以及气动力学效应对飞行稳定性和操纵性的影响。
综上所述,飞行器在重力场中的轨迹与动力学是一个复杂而重要的研究领域。
飞行器的轨迹可以分为直线飞行和曲线飞行两大类,其运动受到重力的影响,通过调节推力和升力进行克服。
航天器轨道动力学与飞行控制的优化研究航天器轨道动力学与飞行控制是航天器设计中至关重要的一部分,它涉及到航天器在轨道上运行的动力学特性以及对其进行控制和优化,以实现预定的任务目标。
本文将探讨航天器轨道动力学与飞行控制的优化研究,并介绍一些相关的理论和方法。
首先,航天器的轨道动力学描述了航天器在轨道上的运动和变化。
它涉及到航天器的姿态、速度、加速度等动力学参数的变化规律。
在航天器的轨道动力学分析中,经典动力学模型是基础。
该模型主要基于牛顿力学和万有引力定律,并结合航天器在空间中的运动情况,建立了航天器的动力学方程。
这些方程描述了航天器的姿态和位置的变化,可以用来研究航天器的运行轨迹和稳定性。
其次,航天器的飞行控制是保持航天器在轨道上稳定运行,并实现特定任务目标的关键。
航天器的飞行控制主要涉及到航天器的姿态控制和导航控制两个方面。
姿态控制主要是通过调整航天器的姿态参数,如航向、俯仰和横滚角等,来实现航天器在轨道上的定位和操控。
导航控制则是通过航天器内置的导航系统,利用传感器和导航算法来确定航天器的位置、速度和加速度等参数,以实现对航天器飞行路径的精确控制。
为了达到更高的控制精度和效率,航天器轨道动力学与飞行控制需要进行优化研究。
优化研究的目标是通过调整航天器的动力学参数和控制策略,使其在给定任务要求下,能够以最小的能量消耗和最短的时间完成任务。
这涉及到多目标优化、最优控制和强化学习等技术的应用。
例如,可以利用遗传算法、模拟退火算法等优化算法,对航天器的初始参数和控制策略进行优化,以实现轨道运行的最佳效果。
同时,也可以利用最优控制理论和方法,确定最优的控制输入,以实现最小能量消耗和最短时间的目标。
此外,航天器轨道动力学与飞行控制的优化研究还需要考虑航天器的动力学特性和环境因素的影响。
例如,航天器在轨道上受到地球引力、大气阻力和其他外部干扰等因素的影响。
这些因素会对航天器的轨道运动和飞行控制产生一定的影响,需要进行相应的建模和优化研究。
航天器轨道力学航天器轨道力学是探索宇宙、开展航天活动的重要基础学科,它主要研究天体的运动规律及控制和利用它们的方法。
航天器轨道力学是过去和现在航天活动中所面临的主要问题之一,也是未来航天开发的重要领域之一。
一、航天器流动场和轨道安全匀强重力场下轨道分析是航天轨道力学中的基本问题。
航天器在重力作用下的运动轨迹主要受重力的作用,因此,在轨道分析过程中,重力场要被认真考虑。
航天器在地球轨道上的运动,轨道高度高达几百公里,大气稀薄,因此流动场的研究也很重要。
流动场分析包括气流、大气、高温等因素的影响,可以帮助科学家设计推进气态和固态发动机以及设计适应性更强的外部贴附式设备等。
如果不考虑地球自转,地球重力与轨道速度相平衡,所以航天器在略微偏离这些轨道平衡点的地方需要连续地修正航向和速度。
这种修正包括小姿态调整和大姿态调整。
如果考虑地球自转,它会带来另一重要问题:在许多情况下,地球的自转会导致航天器失去必要的姿态控制,从而可能会发生失控错误,因此轨道分析在对这种情况的解决方案上进行了深入研究。
这样的解决方案包括在设计过程中考虑完善的姿态控制系统,制定受限制的轨道,或者在地面控制中更为密切地监控和调整姿态控制系统。
如何保证航天器在轨道上的安全行驶,也是必须考虑的因素。
需要进行彻底的轨道分析,了解航天器与其他天体以及空间中的物体之间的相互影响,建立安全规则,如规定航天器轨道高度,预测轨道交叉日期和交汇点,并采取预防措施以确保轨道安全。
二、调整航天器的轨道调整航天器轨道的常见方法包括:1.点火交会。
这是指通过点火交会对航天器和飞行器进行调整的方法。
该方法对轨道的调整非常灵活,可以迅速调整航天器的姿态,是常用的轨道调整方式。
2.ETA(航飞交换点)。
这是一种用于要求不严格的轨道精度的轨道调整方法,通常用于地球轨道。
3.残余推力调整方法。
残余推力调整方法在轨道调整速度要求不高的情况下适用,可通过调整推进器的活动和姿态控制系统来完成调整。
航天器动力学研究航天器动力学是航天器科学中的一个重要领域,旨在研究航天器在太空环境中的运动规律和状态变化,包括轨道、姿态和推进控制等方面。
航天器动力学研究成果对航天技术的发展和应用有着重要的推动作用,可以为人类探索宇宙、加强地球科学研究、提高航天技术水平等方面做出贡献。
航天器动力学的主要研究内容包括轨道力学、惯性姿态控制、动力姿态控制、推进系统、飞行器结构等方面。
其中,轨道力学研究的是航天器在空间中的运动轨迹、速度、加速度等基本物理量,其研究成果不仅可以为航天设计提供理论依据和仿真分析,还可以为卫星监测和通信提供数据支持;而惯性姿态控制则是指通过惯性测量装置使航天器保持良好的方向和角速度,其研究不仅能够保证航天器的运行状态,还可以为航天器的精确操控、科学探测和工程实践提供有力支持。
此外,动力姿态控制的研究关注于控制航天器的姿态运动,以满足任务要求,比如在轨绕飞、对地观测、地球表面高清拍摄等方面。
而推进系统则是保证航天器能够持续向前运动的关键所在,其研究的目的是设计和应用各种推进器,以满足不同的推进需求,如近地点提升、远地点抵消和姿态控制等。
相对于地球大气环境下的飞行器动力学,航天器动力学具有其独特的难点和挑战。
由于航天器处于无重力、真空、高速环境下,其运动规律和状态变化更加复杂,需要更加高精度的测量和控制技术进行支持。
另外,航天器的工作实践还必须要考虑能源消耗、载荷限制、环保要求等实际条件,对航天器整体设计和运行控制提出了更多要求。
为了充分挖掘航天器动力学研究的潜力和应用价值,航天科研人员需要不断加强对于基础理论和实用技术的研发和集成。
这包括基于轨道力学的自动驾驶技术、基于惯性测量的快速姿态估计技术、基于动力学的反作用轮操纵技术等,在航天器自主化、远程操控和智能化方面进行创新,以提高航天器的运行精度和效率。
总的来说,航天器动力学研究的发展和应用意义深远,它汇聚了多个相关领域的技术和理论,有助于为探索宇宙、研究地球、改善人类生活提供更多的可能性。
航天器轨道与牛顿引力定律航天器轨道是指宇宙中天体之间的运动轨迹。
而这种运动轨迹往往是由牛顿引力定律所决定的。
牛顿引力定律是以牛顿为名的经典力学理论。
它描述了物体之间的引力作用,也被广泛应用于航天器轨道的研究和计算。
第一种常见的航天器轨道是地球静止轨道,又称为地球同步轨道。
地球同步轨道是位于地球赤道上的一类轨道,它的特点是轨道半长轴和地球半径的比例相对恒定。
这种轨道能够使得航天器与地球保持相对静止,因此它非常适合用于通信卫星和气象卫星等任务。
地球静止轨道的计算涉及到牛顿引力定律中的两个重要参数:质量和距离。
根据牛顿引力定律,两个物体之间的引力与它们的质量成正比,与它们的距离的平方成反比。
因此,要使航天器保持在地球静止轨道上,需要在计算中考虑地球的质量和航天器与地球的距离。
除了地球静止轨道,还有许多其他类型的轨道,如低地球轨道和地球转移轨道。
低地球轨道是指距离地球最近的轨道,通常用于观测和科学研究任务。
地球转移轨道是用于将航天器从低地球轨道送入其他轨道,如月球轨道或火星轨道。
在计算其他类型的航天器轨道时,同样需要运用牛顿引力定律。
不同的轨道类型对于牛顿引力的要求略有不同,但基本的计算原理是相同的。
航天器轨道计算中需要考虑的因素还包括航天器的速度、推力以及其他天体间的相互引力影响等。
在牛顿引力定律的基础上,科学家们还发展了许多其他的天体力学理论,如开普勒定律和伽利略运动规律等。
这些理论进一步丰富了对航天器轨道运动的研究和理解。
同时,现代技术的发展也为航天器轨道的计算和预测提供了更精确的方法和工具,使得航天器能够更准确地完成任务。
总的来说,航天器轨道与牛顿引力定律密切相关。
牛顿引力定律既是航天器轨道计算的基础,也是解释天体运动和宇宙结构的重要理论。
通过理解和应用牛顿引力定律,科学家们能够更好地研究和探索宇宙。
随着技术的不断发展,我们对航天器轨道和宇宙的认识将会不断深化,人类将有更多机会去探索宇宙的奥秘。
阐述航天器轨道的定义
航天器轨道的定义是指航天器绕行天体的路径或轨迹。
在航天领域,轨道是航
天器进行宇宙飞行的基本概念之一。
轨道的特点是持续性和稳定性,使得航天器可以维持相对稳定的轨迹运行,并实现特定的任务目标。
航天器的轨道可以是地球轨道、月球轨道或其他行星或天体的轨道。
地球轨道
是指航天器绕地球运行的轨迹。
根据轨道的不同,可以将地球轨道分为低地球轨道(LEO)、中地球轨道(MEO)和高地球轨道(GEO)等。
低地球轨道位于地球的低层大气,高度通常在200至2000公里之间。
这种轨
道适用于一些近地观测卫星、通信卫星和空间实验室等任务。
中地球轨道位于更高的空间,高度约在2000公里至36000公里之间。
在这个轨道上,卫星可以为导航
系统、气象观测和通信等提供服务。
而高地球轨道则位于地球同步轨道,高度约在36000公里以上。
这种轨道适用于通信和广播卫星,因为卫星可以与地球上的观测
站保持相对固定的位置。
航天器轨道的选择与任务需求密切相关。
不同的任务需要不同的轨道高度、轨
道倾角和轨道形状,以达到最佳的运行效果。
轨道的选择还需要考虑到能源消耗、通信连通性和避免碰撞等因素。
总之,航天器的轨道是指其绕行天体的路径或轨迹。
地球轨道分为低地球轨道、中地球轨道和高地球轨道,根据不同任务的需求选择适当的轨道。
轨道的选择需要考虑多种因素,以实现航天器的运行效果和任务目标。