第三章 锚泊力的静力计算11-29
- 格式:ppt
- 大小:1.75 MB
- 文档页数:26

浮标系泊系统静力计算浮标系泊系统是一种广泛应用于海洋工程、水上建筑等领域的重要设备。
它通过将浮标与系泊链连接,不仅能为各种水上设施提供足够的浮力支持,还能有效地保护这些设施不受风、浪等自然环境的影响。
本文主要探讨浮标系泊系统的静力计算,以更深入地了解该系统的性能和设计。
一、浮标系泊系统设计浮标系泊系统的设计包括多个步骤。
首先,需要选择合适的浮标。
浮标的设计应考虑其浮力、稳定性、耐腐蚀性等因素。
同时,浮标还应具有易于识别和追踪的特点,以便于后续的监测和维护。
其次,需要设计系泊链。
系泊链的长度、强度、耐腐蚀性等参数应根据实际需求进行选择和设计。
最后,还需对系泊链进行加工制作,确保其质量和可靠性。
二、静力计算浮标系泊系统的静力计算主要包括对浮标、系泊链以及其他相关结构的力学分析。
具体而言,需要计算浮标的浮力、系泊链的拉力、摩擦力等。
根据这些计算结果,可以进一步了解整个系统的性能特征,并为系统的优化设计提供理论依据。
三、结果分析通过对浮标系泊系统进行静力计算,可以得出以下结论:1、浮标的浮力与系泊链的拉力成正比,而系泊链的拉力又与浮标和水面的距离成正比。
因此,可以通过调整浮标与水面的距离来控制整个系统的受力状况。
2、摩擦力是影响系泊系统性能的重要因素之一。
在设计中应充分考虑系泊链与水、沙等环境因素的摩擦力,以避免出现系统失稳或失效的情况。
3、浮标系泊系统的稳定性受多种因素影响,如海浪的高度、周期、方向以及风速等。
因此,在实际应用中,需要根据具体情况对系统进行相应的调整和完善。
四、总结本文对浮标系泊系统的静力计算进行了详细的研究,通过建立力学模型并进行分析,得出了系统受力状况和稳定性受多种因素影响的结论。
这些结论对于指导浮标系泊系统的优化设计具有重要的意义。
展望未来,浮标系泊系统将在更多领域得到应用,例如海洋资源开发、海洋科学研究、海上风电等领域。
因此,针对不同领域的需求,对浮标系泊系统进行深入研究和优化设计将具有更为重要的现实意义。
船舶用锚的计算和船舶阻力计算公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]一、用锚的计算锚的系留力:P=W aλa+W cλc L1P―――系留力。
是锚抓力与锚链摩擦力的和()W a―――锚在水中的重量。
即锚在空气中重量×(Kg)Wc―――锚链每米长在水中的重量(Kg)L1―――锚链卧底部分的长度(m)λa λc―――锚的抓力系数和锚链的摩擦系数霍尔锚的λa λc表锚的抓重比(海军锚/霍尔锚)锚的系留力也可用经验公式估算:P=W1H a+WH c L1W1―――锚重(Kg)H a―――锚的抓重比(见表)W―――锚链每米的重量(Kg/m)H c―――锚链摩擦系数取-二、锚链出链长度估算1、正常天气,一般不少于下表2、在急流区,出链长度不一般不少于表值3、在风速30m/s(11级)风眩角为300时出链长度值如链长小于5-6倍水深时,锚的抓力将因锚爪的切泥角小而变小,水面以下的链长的水深倍数与锚爪切泥角见表三、八字锚与单锚的锚泊系留力的比值:见表如图:八字锚的系留力四、航运船舶1、锚重的估算:每个首锚重量一般可用以下公式估算:W=KD2/3 (Kg)K―――系数。
霍尔锚取6-8,海军锚取5-7 D―――船舶的排水量(t)2、锚链尺寸估算:d=KD1/3或d=CW1/2或d=W1/2d―――锚链直径(mm)K―――系数。
可取-C―――系数。
可取-3、每节锚链重量估算:Q=Kd2 (Kg)K―――系数。
有档链取,无档链取4、锚链强度估算:R=Kd2g (N)K―――系数。
有档链取56,无档链取38g―――(m/s2)5、每节锚链环数估算:M=6250/dM―――每节锚链环数,取整数的单数(个)五、工程船舶以海军锚和锚缆计算1、锚重:船首边两只,每只锚重量按下式计算:W=K(A+15BT) (Kg)W―――锚重A―――满载吃水线以上各部分在船中纵剖面上的投影面积(m2)B、T―――分别为船舶宽度与吃水(m)K―――系数。

第45卷第5期2005年9月大连理工大学学报Journal of Dalian University of TechnologyVol .45,No .5Sept .2005文章编号:1000-8608(2005)05-0682-05收稿日期:2004-04-16; 修回日期:2005-03-05.作者简介:肖 越(1976-),男,博士;王言英*(1938-),男,教授,博士生导师.浮体锚泊系统计算分析肖 越, 王言英*(大连理工大学船舶工程学院,辽宁大连 116024)摘要:利用数值方法研究了锚泊浮体在风、浪、流联合作用下的运动响应和锚链线张力变化规律.采用的数学模型主要包括三维锚链线静力模型和浮体频域运动模型.在数值计算中,分别采用有限差分法和频域格林函数法求解三维锚链线静力模型和浮体频域运动模型得到锚泊系统的总体刚度和浮体的水动力参数,据此求解锚泊浮体运动方程,得到锚泊浮体的运动响应和锚链线上的张力变化.对一锚泊半潜式海洋平台的实际校核应用证明,本方法可以提供具有工程精度的锚泊性能预报.关键词:频域法;运动方程;锚泊系统中图分类号:U 662;P752文献标识码:A0 引 言船舶与海洋结构物的锚泊问题是当今船舶与海洋工程中的重要问题之一.目前对于锚泊浮体的计算,大多采用悬链线方法.该方法是一种简单的解析方法,但是由于其采用了过多的假设,造成了计算结果精度偏低.为了锚泊系统的安全,锚泊系统设计者不得不在计算结果上乘以一个较大的权数,以保证实际锚泊系统达到设计要求.本文采用一种考虑锚链线各种受力并允许锚链弹性变形的计算模型.在频域内,通过与浮体运动的耦合分析,计算锚泊浮体的运动与受力,采用数值方法计算锚链线模型,并通过一个实际算例的计算与分析来验证本方法在工程实际中的应用.1 数学模型1.1 浮体运动模型1.1.1 坐标系 为了便于表示和分析浮体在波浪上的运动,采用如图1所示的坐标系统.在图中引入两个坐标系:参考坐标系O ′-x ′y ′z ′和随体坐标系(动坐标系)O -x y z .在参考坐标系O ′-x ′y ′z ′中,坐标面O ′x ′z ′位于静水 面;O ′x ′轴指向船首,同时O ′y ′轴垂直水面向上.而在随体坐标系O -x y z 中,坐标面Ox z 位于静水面;Ox 轴指向船首,同时Oy 轴垂直水面向上,且该坐标系固定于浮体上并与浮体一起运动.图1 浮体运动坐标系统示意图F ig.1 T he sketch o f motion coor dinates for afloating -bo dy1.1.2 运动模型 在波浪中运动的锚泊浮体所受的载荷有重力、浮力、风力、流力、锚泊力和波浪力(一阶和二阶).其中浮力分为静水浮力和浮体运动时产生的静水恢复力.各种外载荷共同作用,引起浮体的运动,根据准静态结构分析原理,当假定浮体处于瞬态静止时,作用在浮体上的外力不是一个平衡力系,其不平衡力由浮体运动加速度引起的浮体惯性力来平衡.浮体所受的一阶 波浪力、静水恢复力、惯性力和锚泊力是相互联系并随时间变化的,需要通过求解运动平衡方程得到:Mx õõ+Cx õ+Kx =F 1w(1)式中:M 为附加质量矩阵;C 为阻尼系数矩阵;K 为静水恢复力系数矩阵;x õõ、x õ、x 分别为广义加速度列阵、广义速度列阵、广义位移列阵;F 1w 为一阶波浪力.1.2 锚链线模型1.2.1 坐标系 在锚泊系统的计算中,引入如图2所示的2个坐标系:总体坐标系和局部坐标系.图2 锚泊系统坐标系示意图F ig.2 T he sketch of the co or dinates fo r a mo or ingline 在图2中,总体坐标系O -x y z 为右手笛卡儿坐标系,其坐标原点O 位于锚点.而局部坐标系tbn 的坐标原点位于锚链线上的任意一点,t 轴指向锚链线的切线方向,n 轴指向锚链线的法线方向,b 轴指向锚链线的次法线方向.1.2.2 运动模型 运动模型如下:W c co s A +F (1+E )-T 5A /5s =0(2)-W c sin A +G (1+E )+5T /5s =0(3)H (1+E )+T cos A õ5H /5s =0(4)5x /5s =(1+E )cos A co s H (5)5y /5s =(1+E )sin A (6)5z /s =(1+E )cos A sin H(7)E =T /AE(8)式中:W c 为单位长度锚链在水中的质量;E 为单位长度锚链的应变;H 、F 、G 分别为b 、n 、t 方向上锚链受到的流体作用力;A 为锚链线沿长度方向的倾角;H 为锚链线与x 轴的夹角;T 为锚链线上的张力;A 为横截面面积,E 为弹性模量.在式(2)~(7)中,有6个未知量A 、H 、T 、x 、y 、z ,而方程的个数也为6个,所以方程组是封闭的.1.2.3 边界条件 锚链线下点边界条件(忽略锚链线在海底平铺部分,即锚的位置):x =y =z =0(9)锚链线上点边界条件(s =l ):x =x b ,y =y b ,z =z b(10)其中x b 、y b 、z b 分别为浮体在锚泊点处的位移坐标.1.3 锚泊浮体运动模型锚泊浮体的运动模型如下:Mx õõ+Cx õ+Kx =F 1w +F 2w +F m +F wd +F c(11)式中:F 2w 为二阶波浪力;F w d 为风力;F c 为流力;F m为锚泊力.2 数值方法2.1 水动力系数的计算采用频域格林函数法计算M 、C 、K .2.1.1 定解条件 流场连续条件[L ]、自由表面条件[F ]、海底不可穿透条件[B ]、物面边界条件[S ]以及远方辐射条件[R ]构成了在不可压缩无粘无旋流场中绕流物体辐射问题的定解条件,如式(12)所示:25=05255t 2+g 555y =0555n=U j n j limy →∞5=0lim R →∞R555R-i k 5=0 [L ][F ][S ][B ][R ](12)式中:n 为物面外法线方向上的单位矢量;L 为波长;R =(x 2+z 2)12;5为流场速度势.2.1.2 格林函数法 首先在浮体的平均湿表面S 0上剖分网格,根据下两式计算网格单元上的源强R 和流场的速度势[1、2]:U (P )=14P kSR (Q )G (P ,Q )d S(13)5U (P )5n =12R (P )+14P kS 0R (Q )5U (P ,Q )5nd S (14)其中G (P ,Q )为已知的格林函数.由于格林函数具有一阶奇异性,并且在奇异点附近具有高频震荡性,对于格林函数的数值计算一般采用纽曼提出的分区级数法[3、4].683 第5期 肖 越等:浮体锚泊系统计算分析2.2 二阶波浪力的计算[5]采用Pinkster公式计算二阶波浪力F2w=-12Q g∫w l(G(1))2n d l-k S0-12Qû5(1)û2n d S-kS-Q(x-(1)õ5(1))n d S+x(1)5õm Xõõ3g(15)式中:G(1)为流场的一阶波面升高;5(1)为流场的一阶速度势;x-(1)为湿表面上一点的一阶线性位移;x(1)5为浮体的一阶纵摇角;Xõõ3g为浮体重心的垂荡加速度.2.3 锚链线模型的计算采用数值方法,将连续锚链线离散为n段.离散后的锚链线模型为[6~13]W c cos A i+1-A i2$S+F i(1+E i)-T iA i+1-A i2$S=0(16)-W c sin A i+1-A i2$S+G i(1+E i)+T i+1-T i2$S=0(17)T i cos A i H i+1-H i2$S+H i(1+E i)=0(18)x i+1-x i2$S=(1+E i)cos A i co s H i(19) y i+1-y i2$S=(1+E i)sin A i(20) z i+1-z i2$S=(1+E i)cos A i sin H i(21)E i=T iE i A i(22)根据式(16)~(21),方程组具有6n+6个变量,而仅有6n个方程,因而必须增加6个附加方程才能使方程组封闭.根据边界条件得到如下6个附加条件:x0=y0=z0=0(23)x n=x b,y n=y b,z n=z b(24) 2.4 锚链浮体系统耦合计算由于风力、流力、二阶波浪力相对于一阶波浪力而言可视为定常力,二阶波浪力、风力和流力最终由锚泊力的水平分力平衡,可将其加入锚链的预张力中[14].在计算锚泊浮体运动时,首先,根据经验公式或规范计算风力和流力,而二阶波浪力由格林函数法计算,以便确定锚链的初始预张力[15];其次,根据式(1)计算浮体在自由状态时的位移量;第三,由浮体在自由状态时的位移量,根据式(2)~(8)计算锚链中的张力(注:预张力可由第一步中的计算结果得到);第四,在考虑锚泊力的情况下,计算式(11),可得到浮体的位移量,本次得到的位移量是考虑了锚泊系统后的位移量;第五,根据第四步得到的位移量,采用式(2)~(8),计算锚链中的张力;第六,重复第四步和第五步,直到前后两次计算得到的浮体位移量在工程精度许可的范围内.在各次循环中,必须检验锚链的张力是否超过锚链的许用强度.对于锚泊系统的要求是:在保证锚链不发生断裂的情况下,锚泊浮体的位移量越小越好.基于这一原则,如果在结束循环后,发现锚链并没有断裂,可考虑增加锚链的预张力,再次按上述的计算步骤计算.如锚链还没有断裂,则继续增加预张力,直到锚链发生断裂.取最后一次锚链没断裂时的预张力为设计预张力.如果在上述计算步骤中,锚链发生断裂,可以考虑改变工作海况或改变锚链型号和直径,再次计算,直到满足要求.3 数值算例3.1 海况参数设计波的波高为32m,周期为18s.最大风速为51.5m/s,最大流速为2.3m/s.3.2 平台参数根据给定的质量和装载资料,平台在自存状态和作业状态的排水量、空船质量和可变载荷见表1.表1 平台参数T a b.1 P lat for m par ameter s项目 自存状态作业状态吃水/m21.023.75排水量/t4952652331空船质量/t2324023240空船重心距基线/m24.32724.327甲板可变载荷/t67006700甲板可变载荷重心距基线/m42.342.33.3 布锚方式及锚链参数采用辐射状八锚方式布锚,各根锚链与x轴间的夹角B见表2.布锚方式的示意图如图3所示.锚链采用3级直径为92mm的有挡锚链.684大连理工大学学报第45卷 表2 锚链线与x 轴间的夹角T ab.2 T he angles bet ween mo or ing lines and x a xisNo.B /(°)No.B /(°)1-3051502-7061103-1107704-150830图3 八锚布锚方式示意图F ig.3 T he layo ut of 8moo ringlines3.4 计算结果在平台湿表面上划分1344个四边形常数单元,建模时不考虑浮体和立柱边角的圆角.根据本文的方法,计算结果如图4~7所示.图4 艏摇幅值示意图Fig.4 T he sketch o f yaw amplitude图5 横荡幅值示意图Fig.5 T he sket ch o f sw ay amplit ude 图4~6分别给出锚泊半潜式平台在不同波浪入射角H w 和来流入射角H c 条件下,艏摇幅值X 6、横荡幅值X 2和纵荡幅值X 1随预张力T 0的变化关系.图7(a)~(c)分别给出No.4锚链的张力T 随预张力T 0的变化关系.从图中可见,锚泊平台运动幅值X i (i =1,2,6)随着T 0的增大而减小,而锚链张力T 却增大.当T 0大于130kN (阀值)时,运动幅值X i 的变化很小但锚链张力却更加显著地增大直到锚链断裂.在工程实际应用中,应将预张力定为130kN 以下,以保证锚泊系统的安全.图6 纵荡幅值示意图F ig.6 T he sketch o f sur g e amplitude(a)H w =150°,H c =150°(b)H w =90°,H c =180°(c)H w =180°,H c =120°图7 No.4锚链张力值示意图F ig.7 T he sket ch of the tensio n o n the N o.4mo or ing line685 第5期 肖 越等:浮体锚泊系统计算分析4 结 论采用三维锚链线静力模型与频域浮体运动模型耦合求解的方法,可以得到锚链浮体运动响应和锚链线张力变化.算例计算结果表明当预张力大于阀值时,浮体运动幅值变化不大而锚链线张力却显著增加.参考文献:[1]王言英,李芳.浮式结构物在波浪中的运动响应计算[J].水动力学研究与进展,1995,10(6): 572-580.[2]王言英,朱仁传,苗杰.波浪中航行浮体设计载荷与运动计算[J].大连理工大学学报,1998,38(4): 338-340.(W A N G Y an-y ing,ZHU Ren-chuan,M IA O Jie.Co mputat ion o f desig n lo ad and motion for floating str uct ur es navigat ing in w av es[J].J Dalian Univ Technol,1998,38(4):338-340.)[3]范菊,黄祥鹿.锚泊线的动力分析[J].中国造船,1999,40(1):13-20.[4]刘应中,缪国平,李宜乐,等.系泊系统动力分析的时域方法[J].上海交通大学学报,1997,31(11): 7-12.[5]谢楠,郜焕秋.浮标-缆-物体综合系统动力学二维时域分析[J].水动力学研究与进展,2000,18(2):202-213.[6]朱新颖,黄祥鹿.深海锚泊浮标的二阶动力分析[J].海洋工程,2002,22(2):74-78.[7]范菊,陈小红,黄祥鹿.锚泊线一阶运动响应对二阶锚链阻尼的影响[J].船舶力学,2000,4(6): 20-27.[8]范菊,陈小红,黄祥鹿.三阶摄动对锚泊线动力分析的影响[J].船舶力学,2000,4(1):1-9.[9]黄祥鹿,陈小红,范菊.锚泊浮式结构波浪上运动的频域算法[J].上海交通大学学报,2001,45(10): 1470-1476.[10]陈小红,黄祥鹿.随机振荡法测量锚泊线动力的双频率响应函数[J].上海交通大学学报,1995,29(5):13-19.[11]范菊,纪亨腾,黄祥鹿.浮式塔的动力计算[J].海洋学报,2001,23(2):117-123.[12]陈小红,黄祥鹿.单点系泊海洋资料浮标的动力分析[J].中国造船,1995,36(3):1-13.[13]李远林,吴家明.多锚链系泊浮筒非线性漂移运动的时域模拟[J].海洋工程,1990,10(1):25-33. [14]QI AN K,W A N G Y Y.A naly sis o f w ave loads o n asemi-submersible platfo rm[J].C hina Ocean Eng,2002,16(3):395-406.[15]冯刚,吴海帆,黄洪钟,等.工程船舶锚泊移位系统的最优控制及拟静力分析[J].海洋工程,2001,19(4):1-4.Computational analysis of moored floating-bodyXIAO Yue, WANG Yan-ying*(School of Naval Archit.,Dalian U ni v.of Technol.,Dal ian116024,Chi na)Abstract:The motion and tensio n respo nses of a mo ored system due to com bined w ind-w ave-current action are numerically studied.T he mathem atical mo del is composed of3D moo ring-line static m odel and floating-bo dy mo tion model in frequency domain.In the study,the stiffness of a m oored sy stem and the hy drodynamic coefficients of a floating-body are calculated separ ately by finite differ ence metho d(FDM)and the Green functio n metho d.Based on coupling the above metho ds,the response and tension v ariation of the mo ored sy stem is analy zed.As a num erical ex ample,a mo ored semi-submerged platfor m is adopted.T he calculation r esults show that the m ethod is r eliable and feasible for predicting the moor ed system.Key words:frequency-domain m ethod;m otio n equation;m oored sy stem686大连理工大学学报第45卷 。
![锚索测力计监测物理量的计算[精品资料]](https://img.taocdn.com/s1/m/5d1aa0a92e3f5727a4e96217.png)
锚索测力计监测物理量的计算[精品资料] 锚索测力计监测物理量的计算-精品资料本文档格式为WORD,感谢你的阅读。
最新最全的学术论文期刊文献年终总结年终报告工作总结个人总结述职报告实习报告单位总结摘要:锚索测力计主要用来监测各种锚杆、锚索、岩石螺栓、支柱、隧道与地下洞室中的支架以及大型预应力钢筋混凝土结构中的荷载及预应力的损失情况。
目前普遍应用的为多弦式锚索测力计,在运行的过程中常常会出现部分测点失效的情况,若部分测点失效,只要找到合适的计算方法,就可以准确计算出锚固力,使得锚索测力计能发挥正常监测的作用。
关键词:锚索测力计;锚固力;线性回归;计算;误差Abstract: The loss of anchor cable dynamometer is mainly used toload and prestressed frame to monitor all kinds of bolt and anchor, rock bolts, pillar, tunnel and underground cavern and the large prestressed reinforced concrete structure in the. The current widely used for multiple string type anchor dynamometer, in the course of operation is often part of measuring points of failure, if part of the measurement point of failure, only to find the appropriate numerical methods, we can accurately calculate the anchor force, the anchor cable dynamometer can play a normal monitoring role.Keywords: anchor ergometer; anchoring force calculation; error; linear regression;TU740引言由钻孔穿过软弱岩层或滑动面,把一端锚固在坚硬的岩层中,然后在另一个自由端进行张拉,从而对岩层施加压力对不稳定岩体进行锚固,这种方法称预应力锚索,简称锚索,其示意图见图1,预应力锚索在岩土工程边坡、地下硐室及其他大型预应力钢筋混凝土结构中均有广泛的应用。
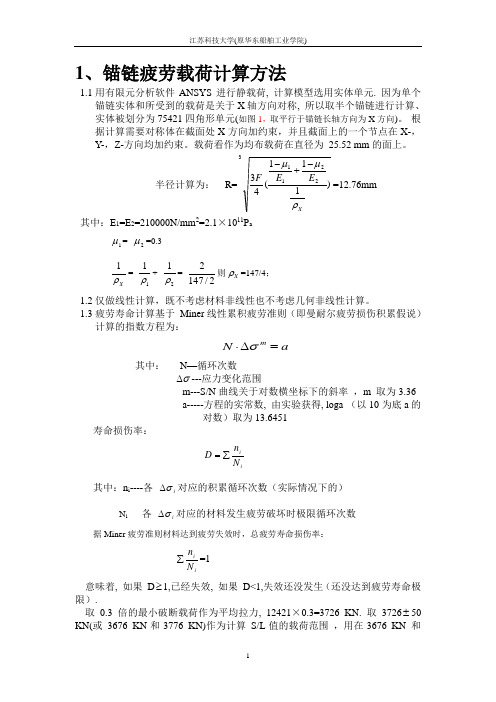
1、锚链疲劳载荷计算方法1.1 用有限元分析软件ANSYS 进行静载荷, 计算模型选用实体单元. 因为单个锚链实体和所受到的载荷是关于X 轴方向对称, 所以取半个锚链进行计算、 实体被划分为75421四角形单元(如图1,取平行于锚链长轴方向为X 方向)。
根据计算需要对称体在截面处X 方向加约束,并且截面上的一个节点在X-,Y -,Z-方向均加约束。
载荷看作为均布载荷在直径为 25.52 mm 的面上。
半径计算为: R=)111(4322113XE EF ρμμ-+-=12.76mm其中:E 1=E 2=210000N/mm 2=2.1×1011P a1μ= 2μ=0.3Xρ1=11ρ+21ρ=2/1472则X ρ=147/4;1.2 仅做线性计算,既不考虑材料非线性也不考虑几何非线性计算。
1.3 疲劳寿命计算基于 Miner 线性累积疲劳准则(即曼耐尔疲劳损伤积累假说)计算的指数方程为:a N m=∆⋅σ其中: N —循环次数σ∆---应力变化范围m---S/N 曲线关于对数横坐标下的斜率 ,m 取为3.36 a-----方程的实常数, 由实验获得, loga (以10为底a 的对数)取为13.6451寿命损伤率:ii N n D ∑=其中:n i ----各 i σ∆对应的积累循环次数(实际情况下的)N i -----各 i σ∆对应的材料发生疲劳破坏时极限循环次数据Miner 疲劳准则材料达到疲劳失效时,总疲劳寿命损伤率:ii N n ∑=1意味着, 如果 D ≥1,已经失效, 如果 D<1,失效还没发生(还没达到疲劳寿命极限).取0.3倍的最小破断载荷作为平均拉力, 12421×0.3=3726 KN. 取 3726±50 KN(或 3676 KN 和3776 KN)作为计算 S/L 值的载荷范围 ,用在3676 KN 和3776 KN 下的锚链最大主应力的差值计算得到应力-载荷比值S/L,S/L=372636763776σσ-=0.080508815S/L 乘以载荷变化范围得到应力变化范围, i σ∆=L ∆×S/L 。
锚泊受力分析:1.微分计算如图为无弹性悬垂线段上任意一缆索元的静力图 ()cos()cos 0()sin()sin 0T dT d T T dT d T w dl θθθθθθ++-=⎧⎨++--=⎩(1) cos 1sin d d dTd θθθθθ≈≈考虑到当为极小量时,和,且忽略sin cos 0cos sin 0T d dT T d dT w dl θθθθθθ-=⎧⎨+-=⎩ (2) 由(2)得cos sin Td w dldT w dl θθθ=⎧⎨=⎩ (3)由图可得:cos sin dx dldy dl θθ=⎧⎨=⎩ (4) 由(3)、(4)1/()()cos H dx Td w d w dT w dy θθθ⎧==⎪⎨⎪=⎩(5) 2.积分计算积分得()[ln(tan ln(tan sec tan ()()ln()sec tan b a b b a a ba H x w H H w w T T w y θθθθθθ⎧=+-+⎪⎪⎪+⎪==⎨+⎪⎪-=⎪⎪⎩(6)(7)3.书中计算过程作用于船舶的环境力H 为水平方向。
在锚不发生走锚时,力平衡,即H=H0000tan tan V H H θθ== (2-1)00sec T H θ== (2-2)(2-3)(2-4)(2-5)4.结论——安全锚泊的极限状态 悬链线在锚点处与海底相切(00θ=),在这种情况下,锚仅仅受到水平力H 0作用(V 0=0)。
(2-3)——(2-5)可简化为:tan sec 1ln(sec tan )ln[1()]ws H w y Hw w x s y H H θθθθ⎧=⎪⎪⎪=-⎨⎪⎪=+=++⎪⎩(2-9)(2-10)(2-11)由于22sec 1tan θθ=+,从而得到(2-18)(2-19)锚链筒出口处A 点的锚索张力为(2-20)。
第31卷 第4期大连海事大学学报Vol.31 N o.4 2005年11月Journal of Dalian Maritime University No v 2005文章编号:1006-7736(2005)04-0010-05锚泊状态下锚链作用力的计算方法侯建军1,2,东 日方2,石爱国2,尹建川1(1.大连海事大学航海学院,辽宁大连 116026;2.海军大连舰艇学院航海系,辽宁大连 116018)摘要:分别给出三种锚泊状态,即船体运动比较平缓、大风浪和走锚下求解锚链对船体作用力的方法.对于有铺底锚链时的静态锚链作用力的计算,着重介绍了两种新的方法———迭代法和优选法.最后通过计算实例,得出了若干结论.为实现完整的锚泊仿真系统提供了重要的理论基础.关键词:船舶工程;锚泊状态;锚链作用力;计算方法中图分类号:U661.338 文献标识码:A0 引 言锚泊仿真,可广泛用于船舶动力定位、锚泊抗台指挥、锚泊作业分析及船舶操纵模拟器中.用于锚泊仿真的数学模型,主要进行锚抓力和锚链对船体作用力两方面的研究.这里讲的锚链对船体的作用力,是指锚链对船体的水平作用力(用F h 表示).目前有三种互相联系的研究模式.一种是建立风洞水槽,测试锚泊船模在各种条件下所受锚链力,然后用回归方法,建立数学模型,有代表性的是井上欣三等人的工作[1-3];一种是对锚泊船进行测试,再加以总结,如文献[4];第三种是理论研究,结合计算机仿真,如B.J.Maga,H.R.泽尔海姆[5]等人的工作.虽然一些大型、超大型油船采用单点系泊系统(SPM)以及其他输油方式,带动了锚泊研究,但锚链在各种海况下对船体作用力的数学模型,仍缺少普遍认可的结果.多数研究局限于通过计算出风、流、浪等外力进而推导铺底链长度和锚链悬链长度[6-7],这无法达到锚泊仿真的要求.本文认为,在船体运动比较平缓的情况下,可以用悬链线方程求解F h.在风、流、浪作用力较大的情况下,需要用动态锚链作用力方程求解F h.在走锚的情况下,则需用走锚方程求解F h.1 静态悬链力方程锚啮入底土后,即需建立以锚位点为原点的坐标系,它相当于将固定坐标系原点移至锚位点处,可以用平移方程解决两坐标系的互换问题,如图1所示,其中θ为锚链方位.图1 锚位坐标系设锚孔位于首柱处,则F Xm=F h cos(-θ)F Ym=F h sin(-θ)M m=F h l mG sin(-θ)(1)式中:l mG为锚孔至重心的距离;F Xm,F Ym,M m分收稿日期:2005-06-29.作者简介:侯建军(1973-),男,河北高碑店人,讲师,博士研究生. DOI:10.16411/ ki.issn1006-7736.2005.04.003别为锚链作用于船体X 、Y 方向的力和转矩.在锚链铅垂面hOd 上,锚—锚链—船体的关系如图2所示.图中:F 、F v 、F h 分别为锚链对船体作用的合力、垂向分力、水平分力;L 为锚链悬链长;l 0为锚链铺底链长;L m 为放出锚链总长;d m 为锚孔至锚位点距离;F m 为锚对锚链的作用力.图2 锚—锚链—船体间的相互作用在静平衡状态下:F h =F m +w L l 0μ如没有铺底锚链,F h 可径直用悬链力方程[8]求解:F h =w L ·a =w L ·L 2-h22h(2)式中:h 为锚孔至底土高度;a 为悬链线参数.在有铺底锚链的情况下,由于未知数多,求解比较复杂.根据目前所掌握资料,有两种求解方式.1.1 庄司邦昭公式藤野正隆和庄司邦昭均采用高次方程求解[2,9].庄司邦昭考虑锚链弹性形变后导出的求解F h 的公式如下:F 6h +E A (5-2d m L m)F 5h +(EA )2 10-8d m L m +(d m L m )2F 4h + (EA )310-12d m L m +3(d m L m)2 F 3h +(E A )4(1-d m L m )(5-3d m L m )F 2h + (EA )3(1-d m L m )2F h -2w L h 3(EA )59L 2m=0F v =w L L(3)式中:E 为锚链弹性模量;A 为锚链截面积.在锚链动态受力的情况下,考虑锚链的弹性形变有重要意义,而在静态条件下,其意义不大,且解高次方程比较复杂,不便于仿真运用.1.2 文献[10]求解F h 的公式文献[10]的思路是:将F h 看成d m 的函数F h =f (d m ),然后转化为自然对数的多项式求解.F ′h =∑Nn =0a n (ln d ′m )n (n =0,1,2,…,n )(4)此公式的精度可以,但需对F ′h 进行判断,故应用受到限制.1.3 本文提出的求解F h 的方法之一———迭代法该方法的基本思路为:从悬链线方程导出求解悬链线参数a 的迭代方程,然后用近似方法求出a 的初值a 0,经多次迭代得到较精确的a 值,据式(2)求得F h .(1)由悬链线方程知z =a +h =a ·ch da d a =ln (a +h a +2ah +h 2a)(5) 经推导得到可迭代的形式a =dlna +h +L a式中:d 为锚链切地点至锚孔距离;L 为悬链长.(2)按下列步骤进行计算第一步:求初始值,如图3所示.图3 求d 、L 的迭代初值据公式 L m -L 0+d 0=d mL 20=h 2+d 20a 0=L 20-h22h(7)求得d 、L 、a 的初始值d 0、L 0、a 0.11第4期 侯建军,等:锚泊状态下锚链作用力的计算方法 第二步:a 1=d 0lna 0+h +L 0a 0,若|a 1-a 0|<ε(ε为给定的误差标准值),进入第四步,否则进入第三步.第三步:令a 0=a 1,L 0=2a 0h +h 2,d 0=d m -(L m -L 0),进入第二步.第四步:令a =a 1,则F h =w L a ,停止.上述方法简便易行,经多次测试,计算所得的F h ,精度能满足仿真要求.1.4 本文提出的求解F h 的方法之二———优选法此法基于风、流、浪的作用恒定不变,锚泊船舶单位链重w L 、放出链长L m 、锚孔至锚位点距离d m 、锚孔至水底高度h 已定的静平衡条件,其优点是所需计算次数少.(1)已经证明d a =ln (a +h a +2ah +h2a)则d =a ln (a +h a +2ah +h 2a)(8)又L =2ah +h2(9)d m =(L m -L )+d(10)显然,可以合理设定一系列a 的近似值a ′,由式(8)、(9)求得d 和L 的近似值d ′和L ′,代入Δd =|d m -(L m -L ′+d ′)|(11) 只要Δd 小于所需精度,就可以求得有相当精度的F h .(2)筛选优化的a ′,可用单因素优选法求得[11].具体步骤如下:第一步:合理设定a ′的值域[a 1,a 2],如可令a 1=0,a 2等于走锚时对应的a 值.据a =F h w L ,可得a 2=F h (走锚) w L (若为霍尔锚,可取F h (走锚)=4W m ,W m 为锚重).第二步:令a ′1=0.382(a 2-a 1)+a 1,a ′2=0.618(a 2-a 1)+a 1,根据式(11)求出相应的Δd ′1、Δd ′2.若相对误差Δd ′1 d <ε或Δd ′2d <ε(ε为给定的误差标准值),进入第四步,否则进入第三步.第三步:若Δd ′2<Δd ′1,则令a 1=a ′1,a 2=a 2;若Δd ′2>Δd ′1,则令a 1=a 1,a 2=a ′2,进入第二步.第四步:令a =a ′1(a ′2),得F h =a ·w L ,停止.2 动态锚链力数模当风力较大(如5级以上)或流速较高(如2kn 以上)时,锚泊船会产生偏荡.此时锚链作用于船体的力F h ,不仅时时变化,而且会出现脉冲力.缓慢变化的锚链力称为定常力,以F h 表示;锚链脉冲力称为冲击力,以F h 0表示[12].在上述条件下用静态悬链方程求解F h ,会出现大的误差.要比较精确地求解,可以用集成质量法,它考虑了所有链环的运动和锚链所受流体力,但需要知道锚链的运动情况,需要测定锚链的水动力特性,不便用于一般的锚泊仿真.本文认为,在这种情况下,可以采用井上欣三提出的公式[13]求解F h 和F h 0.井上欣三以8种类型锚泊船的风洞水槽实验为基础,对实验数据进行了回归处理,提出了有一定普适意义的F h 、F h 0计算公式.冲击张力F h 0公式:F h 0p 0=-5.27+59.59lg A BA B 0+0.67(ΥpL pp×100)(12) 定常张力F h 公式:F h p 0=-0.03+8.52lg A BA B 0+0.10(ΥpL pp×100)(13)式中:p 0为船舶正面所受风压力;A B A B 0为船舶侧受风面积与水线下侧投影面积比;Υ L pp 为风压中心位置(风向角90°时)和船舶垂线间长度比,Υp 在船舯之前为“+”,在船舯之后为“-”.上述公式是在锚链放出长度为9倍水深的基础上得出的,如果船舶抛出链长和水深比不等于9,需按下式修正.冲击力修正系数Γ0:Γ0=F ′h0F h 0=145(L m h)-2.25(14) 定常力修正系数Γs :12 大连海事大学学报 第31卷 Γs =F ′h F h =15.4(L m h)-1.245(15)式中:F ′h 、F ′h 0为待求值;F h s 、F h 0为标准值.3 走锚时锚链力数模锚泊船舶是否走锚,在定常风、流作用时,可按F h >F m +w L ·l 0·μ判定.如船舶偏荡严重,则按动态定常力F h 与F m +w L ·l 0·μ的大小关系判定.若F h >F m +w L ·l 0·μ,即为走锚.3.1 走锚时静态锚抓力如锚链抛出长度不足,处于短链状态,则锚对锚链每一瞬时的静态力F h ,可由下式得出,即F h =l 2ω8f cos β(16)式中:f 为中点松弛度,即锚孔至η轴距离一半处的锚链松弛度;β为高差角;w L 为单位链重.当放出链长l 已知,即F h ·f =l 2ω8cos β=K (17)此时,可用双参数0.618法优选F h ·f ,求得F h 值.具体算法如下.(1)由F h 0=l 2-h22hw L ,令l =L ,得F h 初值F h 0,其优选值域为0~2F h 0;(2)由f 0=h2-(a ch d m 2a-a )得f 初值f 0,其优选值域为0~2f 0;(3)用双参数0.618法优选F h ·f .3.2 走锚时动态锚抓力可按下式计算,即(m +m m )d 2S d t2+C m d Sd t +F (S )=F h(18)式中:m 为锚体质量;m m 为锚体带动底土质量;C m 为锚体及带动底土和水底的摩擦系数;F (S )为走锚时的锚抓力;S 为锚体位移.m m 、C m 需要实验确定.4 算 例根据上面提供的数模,即可计算出船舶在锚泊时的静态、动态以及走锚时锚泊力.以船舶在无风流环境下锚泊为例,只要知道抛出的总链长、水深、锚孔至锚位的水平距离以及单位链重和锚重,就可根据前面介绍的优选法和迭代法计算出此时铺底链长和船舶受到的锚链水平作用力.下面举一计算实例,如表1所示.计算条件为:锚重2500kg ,单位链重25kg m ,锚孔至锚位的水平距离11m ,ε(相对误差)为0.001.表1 铺底链长和锚链水平作用力的计算实例抛出链长 m水深 m 铺底链长 m 锚链水平力 9.8N 迭代法优选法迭代法优选法20150.5630.563127.334127.32120134.6834.68363.09063.08921152.9002.89985.51185.54421136.5916.59137.14137.141 从计算结果可以看出:(1)优选法和迭代法的计算结果比较接近,两种方法都具有相当高的精度;(2)在有铺底锚链的情况下,如水深一定,则抛出链长越大,铺底链长就越大,锚链水平力就越小,反之亦然;(3)在有铺底锚链的情况下,如抛出链长一定,则水深越深,铺底链长就越小,锚链水平力就越大,反之亦然.5 结束语锚泊数学模型是船舶操纵运动仿真模型的重要组成部分,而锚链对船体作用力的计算模型则是锚泊数模的关键.通过本文提供的数学模型,能够计算出船舶在各种状态下所受锚链力的数值,为实现完整锚泊仿真系统提供了重要理论基础.参 考 文 献:[1]井上欣三.荒天中锚泊の安全性向上に关する研究[A ].日中航海学会学术交流会论文集[C ],1984.56-60.[2]藤野正隆.单锚泊时の潮流にょる船体振れまおり运动の实用计算法[A ].日本造船学会论文集[C ],1983.78-80.[3]藤井照久.他·锚泊中の实船の振れ回り轨迹につぃて[A ].日本航海学会论文集[C ],1980.25-30.[4]米田谨次郎.他·荒天锚泊に关する实验研究第二报,双锚泊,振れ止め锚泊につぃて[A ].日本航海学会志第23号,13第4期 侯建军,等:锚泊状态下锚链作用力的计算方法 1960.42-45.[5]H .R .泽尔海姆.单点系泊系统运动分析[J ].船舶力学,1983(7):20-23.[6]魏云雨.稳定锚泊状态下悬垂链长度的另一求取方法[A ].航海技术与航海教育论文集[C ],2003.185-186.[7]陆志材.船舶操纵[M ].大连:大连海事大学出版社,2000.[8]陈君义.船艺[M ].北京:人民交通出版社,1992.15,19.[9]庄司邦昭.系留索じ动く张力の解析[J ].东京商船大学研究报告(自然科学),1986,37:25-26.[10]洪碧光.大风中锚泊船偏荡运动分析及走锚预报[D ].大连:大连海事大学,1987.[11]中科院数学所.优选法[M ].北京:科学出版社,1978.50-65.[12]古文贤,赵月林.大风浪中走锚问题的几点探讨[J ].大连海运学院学报,1991,17(3):45-47.[13]井上欣三.关于提高风浪中锚泊安全性的研究[A ].日本航海学会志[C ],1985.21-23.Calculation method of chain force on ship at anchorHOU Jian -jun1,2,DONG Fang 1,SHI Ai -guo 2,YIN Jian -chuan1(1.Nav igation College ,Dalian Maritime Univ .,Dalian 116026,China ;2.Navigation Dept .,Dalian Naval Academy ,Dalian 116018,China )A bstract :In this paper ,anchoring state w as divided into three types ,namely ,the state in w hich the ship moves slow ly ,the state of rough sea and the state of dragging .The method w as proposed to calculate the chain force o n ship of the corresponding state .Two new methods were presented fo r the calculation of static chain force ,i .e .iteratio n and optimization .Calculation example w as also given and some conclusions are draw n .It provided an impo rtant theory basis or realizing integ ral anchoring imitating system .Key words :ship engineering ;at anchor ;chain force ;calculation method (上接第9页)Optimization of ship scheduling with soft time windowsFAN Tie -cheng ,M A Zi ,LI Ya(Automatic Research Center ,Dalian Maritime Univ .,Dalian 116026,China )A bstract :This paper considers a real ship scheduling problem that can be considered as a multi -ship pickup and delivery problem with soft time w indow s (m -PDPSTW ).The motivation of introducing soft time win -dow s instead of hard is to allow controlled time w indow violations for some customers ,by w hich it may be possible to obtain better schedules and sig nificant reductions in the transportation costs .To control the time w indow violations ,inconvenience costs fo r servicing customers outside their time windows are imposed .An optimization based approach based on a set partitioning formulation is proposed to solve the problem .The computational results show that the proposed approach works on the real ship scheduling problem .Key words :ship berthing at harbour ;routing selection ;time w indow ;inconvenience cost ;set partitioning14 大连海事大学学报 第31卷 。
矿山锚杆锚索测力计算公式矿山锚杆锚索测力计算是矿山工程中非常重要的一部分,它可以帮助工程师们准确地计算出锚杆锚索的受力情况,从而确保矿山工程的安全运行。
在矿山工程中,锚杆锚索通常用于支护和加固地下巷道、坡面、井筒等工程结构,承担着重要的支护作用。
因此,对锚杆锚索的受力情况进行准确的计算是非常重要的。
在进行锚杆锚索测力计算时,需要考虑的因素有很多,比如锚杆锚索的材料特性、受力情况、支护结构的形式等。
而在实际工程中,通常会采用一些常见的计算公式来进行锚杆锚索测力计算,下面我们就来介绍一下常见的计算公式。
1. 锚杆锚索受力计算公式。
在进行锚杆锚索受力计算时,需要考虑到锚杆锚索的受力情况,通常包括拉力、剪力和弯矩等。
而在实际工程中,通常会采用以下的计算公式来进行受力计算:拉力计算公式,F = A σ。
其中,F为锚杆锚索的拉力,A为锚杆锚索的截面积,σ为锚杆锚索的应力。
剪力计算公式,V = Q / A。
其中,V为锚杆锚索的剪力,Q为锚杆锚索的受力,A为锚杆锚索的截面积。
弯矩计算公式,M = F e。
其中,M为锚杆锚索的弯矩,F为锚杆锚索的拉力,e为锚杆锚索的杆心距。
2. 锚杆锚索测力计算公式。
在进行锚杆锚索测力计算时,通常会采用一些特定的测力计算公式来进行计算。
常见的测力计算公式有以下几种:(1)钢丝绳测力计算公式,T = K D S。
其中,T为钢丝绳的拉力,K为钢丝绳的弹性系数,D为钢丝绳的直径,S为钢丝绳的伸长量。
(2)液压测力计算公式,P = F / A。
其中,P为液压的压力,F为受力,A为受力的面积。
(3)压力传感器测力计算公式,F = P A。
其中,F为受力,P为压力传感器的输出压力,A为受力的面积。
3. 锚杆锚索受力计算实例。
为了更好地理解锚杆锚索的受力计算,我们可以举一个简单的实例来说明。
假设一根钢丝绳的直径为10mm,长度为100m,受力时伸长了5mm,弹性模量为2.110^5N/mm2,求钢丝绳的拉力。