发那科、法兰克机器人单轴原点设置ppt课件
- 格式:ppt
- 大小:3.91 MB
- 文档页数:8


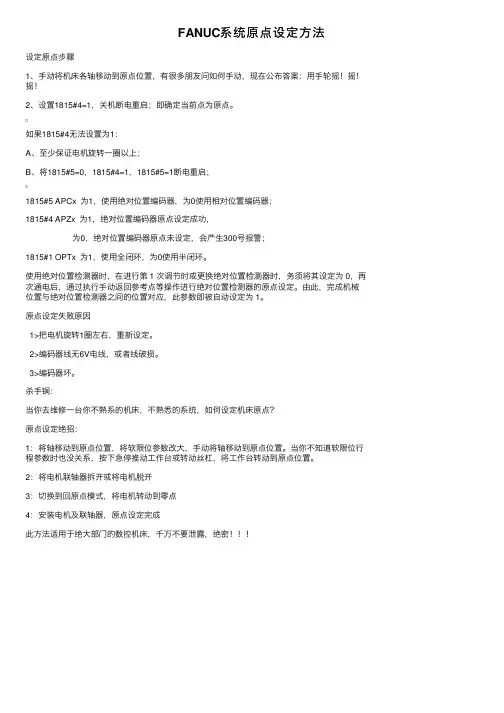
FANUC系统原点设定⽅法
设定原点步骤
1、⼿动将机床各轴移动到原点位置,有很多朋友问如何⼿动,现在公布答案:⽤⼿轮摇!摇!摇!
2、设置1815#4=1,关机断电重启;即确定当前点为原点。
如果1815#4⽆法设置为1:
A、⾄少保证电机旋转⼀圈以上;
B、将1815#5=0,1815#4=1,1815#5=1断电重启;
1815#5 APCx 为1,使⽤绝对位置编码器,为0使⽤相对位置编码器;
1815#4 APZx 为1,绝对位置编码器原点设定成功,
为0,绝对位置编码器原点未设定,会产⽣300号报警;
1815#1 OPTx 为1,使⽤全闭环,为0使⽤半闭环。
使⽤绝对位置检测器时,在进⾏第 1 次调节时或更换绝对位置检测器时,务须将其设定为 0,再次通电后,通过执⾏⼿动返回参考点等操作进⾏绝对位置检测器的原点设定。
由此,完成机械位置与绝对位置检测器之间的位置对应,此参数即被⾃动设定为 1。
原点设定失败原因
1>把电机旋转1圈左右,重新设定。
2>编码器线⽆6V电线,或者线破损。
3>编码器坏。
杀⼿锏:
当你去维修⼀台你不熟系的机床,不熟悉的系统,如何设定机床原点?
原点设定绝招:
1:将轴移动到原点位置,将软限位参数改⼤,⼿动将轴移动到原点位置。
当你不知道软限位⾏程参数时也没关系,按下急停推动⼯作台或转动丝杠,将⼯作台转动到原点位置。
2:将电机联轴器拆开或将电机脱开
3:切换到回原点模式,将电机转动到零点
4:安装电机及联轴器,原点设定完成
此⽅法适⽤于绝⼤部门的数控机床,千万不要泄露,绝密!!!。
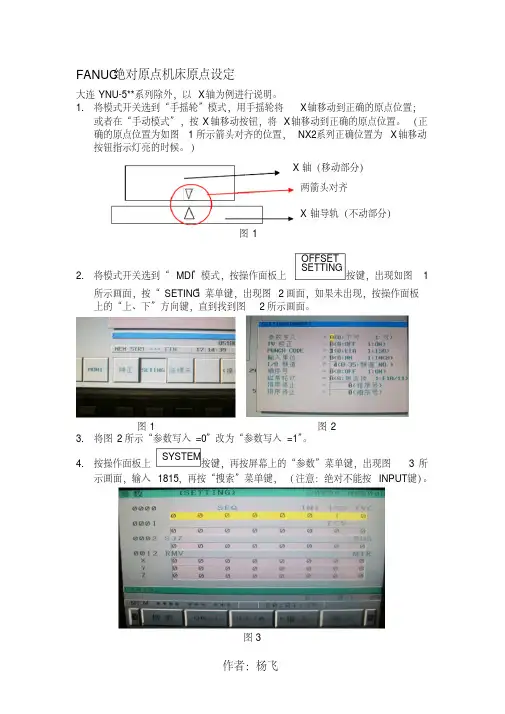
FANUC 绝对原点机床原点设定
大连YNU-5**系列除外,以X 轴为例进行说明。
1.将模式开关选到“手摇轮”模式,用手摇轮将X 轴移动到正确的原点位置;或者在“手动模式”,按X 轴移动按钮,将X 轴移动到正确的原点位置。
(正确的原点位置为如图1所示箭头对齐的位置,NX2系列正确位置为X 轴移动按钮指示灯亮的时候。
)
2.将模式开关选到“MDI ”模式,按操作面板上按键,出现如图1
所示画面,按“SETING ”菜单键,出现图2画面,如果未出现,按操作面板上的“上、下”方向键,直到找到图2所示画面。
图1 图2 3.
将图2所示“参数写入=0”改为“参数写入=1”。
4.按操作面板上按键,再按屏幕上的“参数”菜单键,出现图3所示画面,输入1815,再按“搜索”菜单键,(注意:绝对不能按INPUT 键)。
图3
SYSTEM OFFSET SETTING X 轴(移动部分)
两箭头对齐
X 轴导轨(不动部分)
图1
5.执行完第4步出现图4的画面,按操作面板的方向键,将光标移动到1815
参数X轴所对应的APC位,输入0,将X轴所对应的APC和APZ两位改为0。
图4
6.关电重启。
7.找到图4所示画面,将1815参数X轴所对应的APC和APZ两位依次改为1。
8.找到图2所示画面,将“参数写入=1”改为“参数写入=0”。
9.关电重启。
10.重新对刀,确认机械位置正确后方可加工。
干货FANUC发那科机器人零点标...
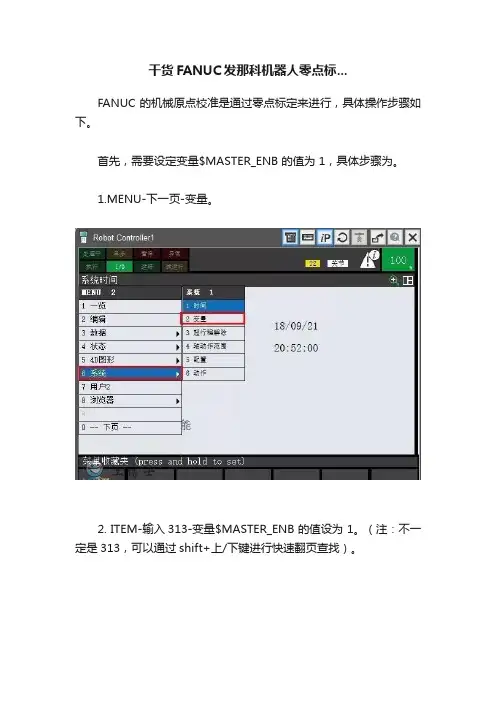
FANUC的机械原点校准是通过零点标定来进行,具体操作步骤如下。
首先,需要设定变量$MASTER_ENB 的值为 1,具体步骤为。
1.MENU-下一页-变量。
2. ITEM-输入313-变量$MASTER_ENB 的值设为 1。
(注:不一定是313,可以通过shift+上/下键进行快速翻页查找)。
接下来,通过MENU-下一页-系统-零点标定/校准,进入校准页面。
(注:可以提前把机器各轴移动至原点位置)
然后单击“全轴零点位置标定”-是,进行零点更新。
如图所示。
***后一步,单击“更新零点标定结果”-是,完成更新操作。
(注:无论哪种标定方法,***后都要进行这一步操作,否则前面的标定结果无效)。
发那科机器人视觉零点标定操作机器人的零点标定是需要将机器人的机械信息和位置信息同步,来定义机器人的物理位置,从而使机器人能够准确地按照原定位置移动。
通常在机器人出厂前已经进行了零点标定。
但是,机器人还是很有可能丢失零点数据,需要重新经行零点标定。
在如下情况,机器人必须进行零点标定:1:机器人执行一个初始化启动;2:SRAM的备份电池的电压下降导致mastering数据丢失;3:SPC(轴编码器)备份电池电压下降导致脉冲计数丢失;4:在关机的情况下卸下电池盒子;5:编码器电源线断开;6:更换编码器。
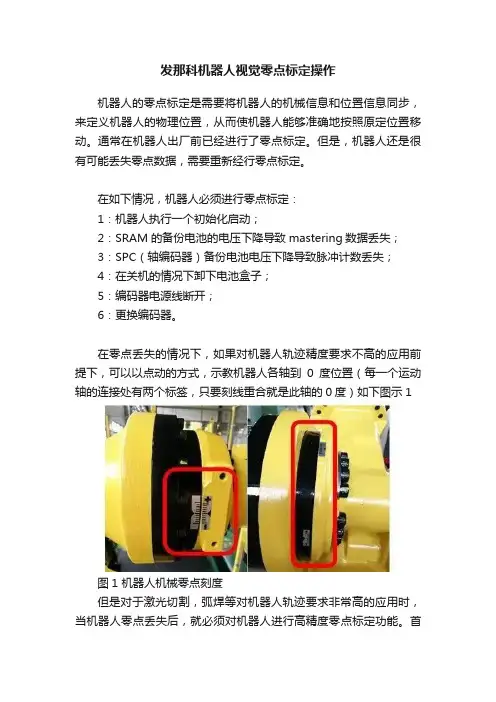
在零点丢失的情况下,如果对机器人轨迹精度要求不高的应用前提下,可以以点动的方式,示教机器人各轴到0度位置(每一个运动轴的连接处有两个标签,只要刻线重合就是此轴的0度)如下图示1图1 机器人机械零点刻度但是对于激光切割,弧焊等对机器人轨迹要求非常高的应用时,当机器人零点丢失后,就必须对机器人进行高精度零点标定功能。
首先点动示教机器人至各轴0度位置,然后在通过视觉的零点标定功能来进一步提供机器人零点精度。
视觉零点标定(Vision Mastering)功能,将相机安装在机器人的工具尖端(无需精度),在多个机器人姿势下,自动测量已被固定的同一测量目标,调整J2~J5轴的零点标定参数和J2~J6轴的弹性系数。
要执行视觉零点标定功能,需要有以下硬件:支持视觉用的机器人控制柜,附带镜头的相机(可参考如下图示2),连接到控制柜的相机电缆,测量目标(可参考如下图示3)(视觉用点阵板),同样需要有以下软件:iRVision 2D Pkg(R685),iRCalibration VMaster (J992)。
图2相机和镜头图3视觉用点阵板本文介绍的不考虑重力补偿有效时的视觉零点标定的步骤。
VisionMastering的方框流程图如下:详细具体的安装要求如下:相机安装位置和点阵板之间的位置要求如图4所示,相机的光轴尽量保持与点阵板平面垂直,相机的位置和目标(点阵板)的位置要在400mm以上,相机与J6轴法兰的中心距离在100mm以上,为了确保在做Vision Mastering的过程中机器人的手腕和相机之间不产生干涉,尽量使得机器人处在如图示的参考位置,如图5所示。