SIFT算法与RANSAC算法分析
- 格式:docx
- 大小:1.88 MB
- 文档页数:7
图像特征检测与匹配方法研究综述图像特征检测与匹配是计算机视觉领域的重要研究方向,它在许多实际应用中发挥着关键作用,如图像检索、目标识别和三维重建等。
本文对图像特征检测与匹配方法进行综述,主要包括特征检测算法、特征描述算法和特征匹配算法三个方面。
一、特征检测算法特征检测算法旨在寻找图像中的稳定不变性特征点,以便用于后续的特征描述和匹配。
常用的特征检测算法包括Harris角点检测算法、SIFT 算法和SURF算法等。
1. Harris角点检测算法:该算法通过计算图像的局部灰度变化,寻找具有最大角度变化的像素。
它能够有效检测出图像中的角点,但对于尺度变化和旋转不变性较差。
2.SIFT算法:SIFT算法通过构建高斯金字塔和尺度空间极值检测,寻找出图像中的尺度不变的关键点。
同时,通过计算局部图像的梯度方向直方图,生成特征向量描述子,实现图像的匹配。
3. SURF算法:SURF算法是SIFT算法的改进版本,采用了一种快速的积分图像技术,大大提高了计算效率。
SURF算法在计算图像的尺度空间极值点时,使用了一种基于Hessian矩阵的指标,检测出更加稳定的特征点。
二、特征描述算法特征描述算法利用特征点周围的图像信息,生成唯一且具有区分度的特征向量。
常用的特征描述算法有SIFT描述子、SURF描述子和ORB描述子等。
1.SIFT描述子:SIFT描述子通过计算特征点周围的梯度信息,生成128维的特征向量。
它具有较强的区分度和旋转不变性,在图像匹配任务中表现较好。
2. SURF描述子:SURF描述子是一种基于Haar小波特征的描述子,使用了一种积分图像计算方法,降低了计算复杂度。
SURF描述子的维度为64维,具有良好的尺度不变性和旋转不变性。
3.ORB描述子:ORB描述子是一种快速的二值描述子,基于FAST角点检测算法和BRIEF描述子。
它既具有较快的计算速度,又能够保持较好的特征区分度,适用于实时图像处理任务。
三、特征匹配算法特征匹配算法的目标是在不同图像中找到相互匹配的特征点对。
基于SIFT特征匹配的图像扭曲纠正方法研究随着数字图像处理技术的发展,对于图像质量、准确性的要求越来越高。
然而,在现实应用中,由于各种因素影响,例如摄像机视角、拍摄距离等,图像出现扭曲、变形等问题已经成为常见问题。
为了解决这一难题,目前普遍应用的图像扭曲纠正方法是基于SIFT特征匹配的。
SIFT(Scale-Invariant Feature Transform)技术是基于尺度空间理论的一种特征提取算法,该算法可以提取不受旋转、尺度、光照等影响的图像特征点。
因此,SIFT在图像匹配及图像拼接等领域有着广泛的应用。
在图像扭曲纠正领域,SIFT特征匹配可以实现对于两张图像的相似度计算,为后续图像变换提供基础。
首先,对于匹配图像的特征点进行提取,得到两张图像中的特征点集合。
然后,对于这两个特征点集合进行SIFT特征匹配。
通过对于两张图像之间的SIFT特征点进行匹配,可以实现对于两张图像的相似度计算。
在特征点匹配过程中,需要根据对应特征点的距离计算两张图像之间的相似度。
通常,根据距离阈值筛选出匹配度较高的特征点对。
接下来,对于得到的特征点对进行RANSAC(Random Sample Consensus)算法,从而可以得到最优的变换矩阵,进而将扭曲图像进行纠正。
RANSAC算法是一种鲁棒性较高的随机采样算法,可以从一系列观测值中筛选出最佳的模型参数。
在图像扭曲纠正中,RANSAC可以得到对于图像的最优旋转、平移等变换矩阵,从而实现对于图像扭曲的纠正。
最后,通过建立变换矩阵,将扭曲图像进行纠正。
在图像纠正的过程中,需要根据变换矩阵对于原始图像进行变换,实现从扭曲图像到纠正图像的转换。
通常,变换矩阵的计算及变换过程可以利用OpenCV等图像处理工具实现。
在变换的过程中,需要注意变换后图像的边界问题,通过拓展边界或裁剪图像等方式进行处理。
综上,基于SIFT特征匹配的图像扭曲纠正方法在实现图像扭曲纠正中具有重要意义。

Matlab中的图像拼接方法与示例分析图像拼接是数字图像处理领域中的重要任务,它能够将多张局部图像合并为一张完整的图像。
Matlab作为一种强大的工具,提供了多种图像拼接方法,本文将介绍其中常用的方法,并通过具体的示例分析其优劣和适用场景。
一、基于特征点匹配的图像拼接方法特征点匹配是一种常用且有效的图像拼接方法,它通过在图像中提取出稳定且唯一的特征点,然后根据这些特征点之间的相对位置关系进行图像的拼接。
在Matlab中,可以使用SIFT(尺度不变特征变换)算法来提取图像的特征点,然后使用RANSAC(随机一致性采样)算法对特征点进行匹配,并通过Harris角点检测算法来筛选出最佳的匹配点。
示例:将两张风景照片拼接成一张全景照片。
首先,使用SIFT算法提取两张照片的特征点,然后使用RANSAC算法对特征点进行匹配。
接着,通过Harris角点检测算法筛选出最佳的匹配点,并根据匹配点计算出图像间的转换矩阵。
最后,使用Matlab中的imwarp函数对图像进行变换,并使用imfuse函数将两张图像拼接在一起,得到最终的全景照片。
二、基于图像重叠区域的无缝拼接方法无缝拼接是指在图像拼接过程中,将多张图像合成为一张时,保持图像之间的连续性和平滑性,使得拼接后的图像看起来像是一张完整的图像。
在Matlab中,可以使用图像重叠区域的像素平均值或像素加权平均值来实现无缝拼接。
这种方法能够减少拼接过程中产生的明显拼接痕迹,使得拼接后的图像具有更好的视觉效果。
示例:将多张卫星图像拼接成一张地图。
首先,读入多张卫星图像,并确定它们之间的重叠区域。
然后,通过像素平均值或像素加权平均值来实现无缝拼接。
最后,使用Matlab中的imshow函数显示拼接后的地图图像。
三、基于图像内容的自动拼接方法自动拼接方法是指针对无法通过特征点匹配或像素平均值等方式进行拼接的图像,通过分析图像内容来实现图像的自动拼接。
在Matlab中,可以使用深度学习模型(如卷积神经网络)来对图像进行内容分析和特征提取,并根据提取的特征对图像进行拼接。
SIFT特征匹配与检索1.SIFT简介SIFT的英⽂全称叫Scale-invariant feature transform,也叫尺度不变特征变换算法,是由David Lowe 先提出的,也是过去⼗年中最成功的图像局部描述⼦之⼀。
SIFT 特征包括兴趣点检测器和描述⼦。
SIFT 描述⼦具有⾮常强稳健性,这在很⼤程度上也是 SIFT 特征能够成功和流⾏的主要原因。
⾃从 SIFT 特征的出现,许多其他本质上使⽤相同描述⼦的⽅法也相继出现。
现在,SIFT 描述符经常和许多不同的兴趣点检测器相结合使⽤(有些情况下是区域检测器),有时甚⾄在整幅图像上密集地使⽤。
SIFT 特征对于尺度、旋转和亮度都具有不变性,因此,它可以⽤于三维视⾓和噪声的可靠匹配。
SIFT算法的实质是:“不同的尺度空间上查找关键点(特征点),并计算出关键点的⽅向” ,SIFT所查找到的关键点是⼀些⼗分突出,不会因光照,仿射变换和噪⾳等因素⽽变化的点,如⾓点、边缘点、暗区的亮点及亮区的暗点等。
2.SIFT算法的特点:1. SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视⾓变化、仿射变换、噪声也保持⼀定程度的稳定性;2. 独特性(Distinctiveness)好,信息量丰富,适⽤于在海量特征数据库中进⾏快速、准确的匹配;3. 多量性,即使少数的⼏个物体也可以产⽣⼤量的SIFT特征向量;4. ⾼速性,经优化的SIFT匹配算法甚⾄可以达到实时的要求;5. 可扩展性,可以很⽅便的与其他形式的特征向量进⾏联合。
3.四步分解SIFT算法3.1Lowe将SIFT算法分解为如下四步:①尺度空间极值检测:搜索所有尺度上的图像位置。
通过⾼斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
②关键点定位:在每个候选的位置上,通过⼀个拟合精细的模型来确定位置和尺度。
关键点的选择依据于它们的稳定程度。
③⽅向确定:基于图像局部的梯度⽅向,分配给每个关键点位置⼀个或多个⽅向。
图像处理中的特征提取和匹配算法图像处理在日益热门的人工智能技术中扮演着一种重要的角色。
在图像处理中,特征提取和匹配算法是两个至关重要的步骤。
特征提取是通过分析图像的局部特点来创建描述图像内容的向量,而匹配是将不同图像的特征或特征向量进行比较,以确定它们是否相似。
本文将介绍几种常用的特征提取和匹配算法。
一、特征提取算法1.尺度不变特征变换(SIFT)SIFT是一种特征提取算法,它能够从不同的尺度和方向上提取图像的局部特征。
这种算法在检索和匹配图像中特别有用。
SIFT算法的基本思想是通过高斯差分算子得到一组尺度空间图像,通过高斯图像之间的差异来确定关键点,然后计算每个关键点的局部梯度的幅值和方向,最后形成一个基于梯度方向的特征描述符。
2.速度增强型稀疏编码(SLEEC)SLEEC是一种新型的高效特征提取算法。
与其他算法不同的是,SLEEC只需扫描一次训练数据即可获得最具代表性的特征。
该算法通过运用具有多个分辨率的降采样、随机稀疏和加速度分析三种技术提取特征,从而实现了比其他算法更高的准确性和速度。
二、特征匹配算法1.暴力匹配算法暴力匹配算法是一种基本的匹配算法,它实现了图像特征之间的精确匹配。
该算法通过比较两个图像之间的每个可能的匹配,来确定匹配的好坏。
虽然该算法的准确性很高,但是它非常耗时,因此只适用于小图像匹配。
2.基于Flann树的匹配算法基于Flann树的匹配算法通过对特征向量进行一系列分割和聚类,以快速找到大量数据中的相似匹配。
该算法不仅适用于大规模数据集,而且具有高效和稳定性。
3.随机抽样一致性算法(RANSAC)随机抽样一致性算法是一种常见的特征匹配算法。
该算法通过随机采样一对点来确定匹配,在这个过程中,通过迭代重复采样和检测结果,不断提高匹配模型的准确度。
结论:在图像处理和计算机视觉中,特征提取和匹配是核心算法。
不同的特征提取和匹配算法适用于不同的应用场合。
在实际应用中,为了达到对图像的快速识别和匹配,我们需要根据具体的需求,选择合适的特征提取和匹配算法。

Step1: BBF算法,在KD-tree上找KNN。
第一步做匹配咯~1. 什么是KD-tree(from wiki)K-Dimension tree,实际上是一棵平衡二叉树。
一般的KD-tree构造过程:function kdtree (list of points pointList, int depth){if pointList is emptyreturn nil;else {// Select axis based on depth so that axis cycles through all valid values var int axis := depth mod k;// Sort point list and choose median as pivot elementselect median by axis from pointList;// Create node and construct subtreesvar tree_node node;node.location := median;node.leftChild := kdtree(points in pointList before median, depth+1); node.rightChild := kdtree(points in pointList after median, depth+1); return node;}}【例】pointList = [(2,3), (5,4), (9,6), (4,7), (8,1), (7,2)] tree = kdtree(pointList)2. BBF算法,在KD-tree上找KNN ( K-nearest neighbor)BBF(Best Bin First)算法,借助优先队列(这里用最小堆)实现。
从根开始,在KD-tree上找路子的时候,错过的点先塞到优先队列里,自己先一个劲儿扫到leaf;然后再从队列里取出目前key值最小的(这里是是ki维上的距离最小者),重复上述过程,一个劲儿扫到leaf;直到队列找空了,或者已经重复了200遍了停止。
控制点检测方法一、引言控制点检测是计算机视觉领域中的一项重要任务,其目的是在图像或视频中准确定位和识别出特定的控制点。
控制点通常是一些具有明确特征的点,可以用于图像配准、三维重建、姿态估计等应用中。
本文将介绍几种常用的控制点检测方法,并对其原理和应用进行详细阐述。
二、特征点检测特征点检测是控制点检测的基础,它通过寻找图像中具有独特性质的像素点,用于表示图像的特定区域。
常见的特征点包括角点、边缘点、斑点等。
特征点检测的目标是找出具有鲁棒性和区分度的特征点,以便后续的匹配和跟踪。
1. Harris角点检测Harris角点检测是一种常用的特征点检测方法,它通过计算图像中每个像素点的角点响应函数,来判断该点是否为角点。
角点响应函数基于像素点的局部灰度变化和邻域窗口的自相关矩阵,通过计算特征值来判断角点的存在与否。
Harris角点检测方法具有简单、快速和鲁棒性好的特点,广泛应用于图像配准、目标跟踪等领域。
2. SIFT特征点检测尺度不变特征变换(SIFT)是一种基于局部图像特征的检测方法,它通过在不同尺度空间中寻找极值点,并提取出具有独特性质的SIFT描述子。
SIFT特征点检测方法具有旋转不变性和尺度不变性的优点,适用于大尺度和小尺度的图像配准和匹配任务。
三、控制点匹配控制点匹配是将两幅或多幅图像中的特征点进行对应的过程,目的是找到它们之间的几何关系。
控制点匹配可以通过特征描述子的相似性度量来实现,常用的方法包括最近邻匹配、RANSAC算法等。
1. 最近邻匹配最近邻匹配是一种简单直观的匹配方法,它将一个特征点与另一幅图像中最相似的特征点进行匹配。
匹配的相似性度量通常使用欧氏距离或汉明距离。
最近邻匹配方法简单易实现,但对于存在噪声和遮挡的情况,容易产生错误的匹配。
2. RANSAC算法RANSAC(Random Sample Consensus)算法是一种鲁棒的参数估计方法,常用于控制点匹配中的模型拟合。
它通过随机选择一组数据样本,计算模型参数,并统计符合模型的样本数目。
测绘技术中的图像匹配与配准方法解析近年来,随着测绘技术的快速发展,图像匹配与配准成为了测绘领域中的热门研究课题。
图像匹配与配准是指通过计算机算法将两幅或多幅图像进行比对和对齐的过程,以实现地理信息的提取和获取。
本文将从理论与方法两方面对图像匹配与配准进行解析。
一、图像匹配的理论基础图像匹配的核心思想是通过计算机算法寻找两幅图像中特征点的对应关系,从而实现图像的对齐和匹配。
在图像匹配中,特征点是最重要的概念之一。
特征点是指在图像中具有独特性和可区分性的局部区域,如角点、边缘点等。
通过寻找特征点并计算其特征描述子,可以实现图像的匹配。
在图像匹配中,主要有两种方法,分别是基于区域的匹配和基于特征点的匹配。
基于区域的匹配是指通过计算两幅图像中各个区域的相似度来判断它们是否匹配。
这种方法适用于图像内容相对简单的情况。
而基于特征点的匹配是指通过计算两幅图像中特征点的对应关系来实现图像匹配。
这种方法适用于图像内容复杂的情况。
二、图像匹配的方法与算法1. SIFT算法SIFT(Scale-Invariant Feature Transform)算法是一种经典的图像特征提取与匹配算法。
该算法通过在图像中检测关键点,并计算关键点的局部特征描述子,来实现对图像的匹配。
SIFT算法具有尺度不变性和旋转不变性的特点,适用于多种场景下的图像匹配与配准。
2. SURF算法SURF(Speeded-Up Robust Features)算法是一种高效的图像特征提取与匹配算法。
该算法通过对图像中的局部区域进行加速特征检测和描述,来实现对图像的匹配。
SURF算法利用了积分图像和快速Hessian矩阵的计算方法,具有较高的计算效率和鲁棒性。
3. 区域匹配算法区域匹配算法是一种基于图像区域相似度的匹配方法。
该算法通过计算两幅图像中各个区域的相似度,来决定它们是否匹配。
常用的区域匹配算法包括相位相关算法、灰度共生矩阵算法和小波变换算法等。
2018,54(2)1引言图像配准技术是计算机图像处理领域的一个重要方向,在医学图像处理、计算机视觉、模式识别等领域有着极其广泛的应用和研究。
图像配准是将不同时间、不同传感器或不同视角下获取的同一场景的两幅或者多幅图像匹配为一张高分辨率、广视角的图像处理过程。
目前常用的图像配准技术主要是基于灰度信息和基于特征的方法[1]。
基于灰度的方法一般采用空间相关法或者频域相关法,主要缺点是对光照变化和噪声干扰比较敏感,且受旋转及遮挡影响较大。
基于特征的方法[2]现阶段运用得较为广泛,主要是利用了从多幅图像提取到的特征点作为匹配基元;所以对环境照明的变化不太敏感,性能较为稳定。
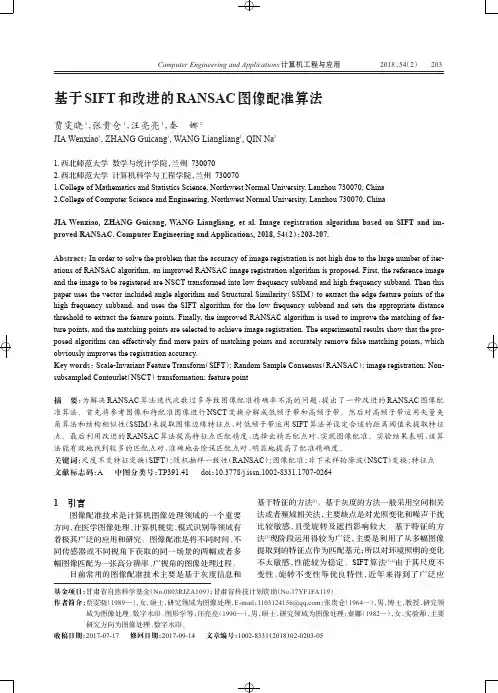
SIFT 算法[3-4]由于其尺度不变性、旋转不变性等优良特性,近年来得到了广泛应基于SIFT 和改进的RANSAC 图像配准算法贾雯晓1,张贵仓1,汪亮亮1,秦娜2JIA Wenxiao 1,ZHANG Guicang 1,WANG Liangliang 1,QIN Na 21.西北师范大学数学与统计学院,兰州7300702.西北师范大学计算机科学与工程学院,兰州7300701.College of Mathematics and Statistics Science,Northwest Normal University,Lanzhou 730070,China2.College of Computer Science and Engineering,Northwest Normal University,Lanzhou 730070,ChinaJIA Wenxiao,ZHANG Guicang,WANG Liangliang,et al.Image registration algorithm based on SIFT and im-proved puter Engineering and Applications,2018,54(2):203-207.Abstract :In order to solve the problem that the accuracy of image registration is not high due to the large number of iter-ations of RANSAC algorithm,an improved RANSAC image registration algorithm is proposed.First,the reference image and the image to be registered are NSCT transformed into low frequency subband and high frequency subband.Then this paper uses the vector included angle algorithm and Structural Similarity (SSIM )to extract the edge feature points of the high frequency subband,and uses the SIFT algorithm for the low frequency subband and sets the appropriate distance threshold to extract the feature points.Finally,the improved RANSAC algorithm is used to improve the matching of fea-ture points,and the matching points are selected to achieve image registration.The experimental results show that the pro-posed algorithm can effectively find more pairs of matching points and accurately remove false matching points,which obviously improves the registration accuracy.Key words :Scale-Invariant Feature Transform (SIFT );Random Sample Consensus (RANSAC );image registration;Non-subsampled Contourlet (NSCT )transformation;feature point摘要:为解决RANSAC 算法迭代次数过多导致图像配准精确率不高的问题,提出了一种改进的RANSAC 图像配准算法。
VSLAM基础(一)————常见特征点提取算法及匹配优化Visual SLAM(Visual Simultaneous Localization and Mapping,视觉同时定位与建图)是一种利用摄像机观测环境特征点进行定位和建图的技术。
在Visual SLAM中,特征点提取算法和匹配优化是实现高精度和鲁棒性的关键。
特征点(Feature Point)是图像中具有独特性的点,可以用于图像对齐、定位和建图。
常见的特征点提取算法有SIFT(Scale-Invariant Feature Transform,尺度不变特征转换)、SURF(Speeded Up Robust Features,快速稳健特征)和ORB(Oriented FAST and Rotated BRIEF,方向自适应FAST关键点和旋转的BRIEF特征描述子)。
这些算法通过不同的方式检测图像中的角点、边缘和斑点等特征。
SIFT算法通过多尺度图像金字塔构建,并通过高斯差分金字塔寻找关键点。
然后,对每个关键点计算其尺度和方向不变的特征描述子。
SURF算法也使用多尺度图像金字塔,但是通过Haar小波快速计算图像的积分图像,从而加速特征点提取过程。
ORB算法则使用FAST角点检测器检测图像中的关键点,并计算具有旋转不变性的BRIEF特征描述子。
在特征点提取后,需要对提取的特征点进行匹配优化。
常见的匹配优化算法有最近邻法(Nearest Neighbor),RANSAC(RANdom SAmple Consensus)和基于光流法的连续匹配。
最近邻法是一种简单的匹配算法,它将每个特征点在两幅图像中寻找最近的匹配点。
然而,这种算法容易受到噪声的干扰,并且无法处理遮挡和动态场景等问题。
为了解决这些问题,RANSAC算法被广泛应用于特征点匹配优化。
RANSAC算法通过随机采样一组特征点对,计算这些点对之间的变换矩阵,并通过对内点进行优化来估计最佳的模型。
特征点提取与匹配算法在SLAM中的应用研究随着科技的不断进步和发展,许多领域都引入了机器人和自动化技术。
其中,SLAM(Simultaneous Localization and Mapping)技术在智能交通、无人驾驶、物流和工业等领域具有广泛的应用前景。
SLAM技术是指在未知环境中,通过机器人自动获取环境中的信息并进行自我定位和建图的过程。
其中,特征点提取和匹配算法是实现SLAM技术的重要组成部分。
本文将着重探讨特征点提取和匹配算法在SLAM中的应用研究。
一、特征点提取算法特征点提取算法是指在图像中检测出具有特征性的像素点,如边缘、角点等,并通过这些像素点进行定位和建图。
常用的特征点提取算法包括Harris角点检测算法、SIFT算法和SURF算法等。
1. Harris角点检测算法Harris角点检测算法是一种基于梯度的角点检测算法。
该算法通过计算像素的梯度来识别图像中的角点。
具体来说,如果一个像素的邻域区域的梯度都比较大,那么这个像素就有可能是一个角点。
2. SIFT算法SIFT算法是一种基于尺度空间和梯度方向的特征点检测算法。
该算法通过分别在不同的尺度下检测图像的局部特征,同时使用关键点的梯度方向进行描述,从而实现对图像的匹配。
3. SURF算法SURF算法是一种加速版的SIFT算法,它采用了积分图像的方法,从而大大提高了特征点提取的速度。
该算法通过对图像的尺度空间和滤波后的图像进行处理,提取出具有代表性的特征点。
二、特征点匹配算法特征点匹配算法是指将两张图像中的特征点进行匹配,从而实现对机器人定位和建图的精确度提高。
常用的特征点匹配算法包括KNN算法、RANSAC算法和Hough算法等。
1. KNN算法KNN算法是一种基于邻近点的匹配算法。
该算法通过计算两张图像中每个特征点和另一张图像的最近邻点之间的距离,从而实现特征点的匹配。
2. RANSAC算法RANSAC算法是一种统计学算法,它可以从一组数据中找到对应模型的最佳匹配。
基于sift、对极几何和ransac配准的图像拼接方法林克全;劳卫伦【摘要】In recent years,the panoramic image has been widely used.More and more scenes need to be displayed in a panoramic picture.This paper applies image feature extraction and fusion technology for mosaicking images taken under the conditions of different displacement of the camera. This paper extracts the SIFT features of different images, and analyzes the features based on epipolar geometry and RANSAC algorithm to discard false matches and find more matches. Therefore, the feature registration and transformation matrix are calculated to improve the accuracy of image registration and image mosaic.%近年来,全景图像已经得到广泛的应用,越来越多场景需要全景图片的展示。
本文结合图像特征提取及融合技术,对在摄像机不同位移情况下拍摄的照片进行拼接。
通过对不同图像的sift特征值提取,并结合对极几何和ransac算法对sift特征值进行分析,剔除错误特征点,进行特征点配准,计算图像间的特征配准及变换矩阵,以提高图像配准的准确度,实现不同图像的拼接。
特征点匹配——SIFT算法详解SIFT(Scale-Invariant Feature Transform)是一种用于在图像中寻找关键点并进行匹配的算法。
该算法由David Lowe在1999年发布,并且一直被广泛应用于计算机视觉领域。
SIFT算法具有尺度不变性和旋转不变性,可以在不同的图像尺度和旋转角度下进行特征点的匹配。
SIFT算法的主要步骤包括关键点检测、关键点描述和特征点匹配。
关键点检测:在一张图像中,关键点通常是指存在于不同尺度和方向上的局部最大值或局部最小值。
SIFT使用高斯差分金字塔来检测关键点。
首先,通过对原始图像进行高斯模糊,创建一个金字塔,然后在每一组金字塔中计算高斯差分图像。
接着,通过比较每个像素周围的8个像素和自身像素的差值,找到局部极值点。
最后,使用尺度空间极大值抑制来进一步过滤出稳定的关键点。
关键点描述:在关键点检测后,需要对每个关键点进行描述。
SIFT使用局部图像梯度的直方图来描述关键点。
首先,在每个关键点周围的16x16像素块上计算梯度的幅值和方向。
然后将这个块分成16个4x4的子块,并在每个子块上计算一个8方向的直方图。
最后,将这些直方图连接起来形成一个128维的向量,用来表示该关键点。
在对两幅图像提取出关键点并进行描述后,需要对这些特征点进行匹配。
SIFT使用欧式距离来计算特征向量之间的相似性。
对于每个特征点,将其描述子与另一幅图像中的所有描述子进行比较,选择最佳匹配的特征点对。
SIFT算法在匹配过程中还引入了RANSAC算法来排除错误的匹配。
RANSAC(Random Sample Consensus)是一种迭代的鲁棒性估计方法,可以通过随机选择一个小子集来估计模型参数,并通过计算剩余误差和阈值来确定最终的模型。
总结一下,SIFT算法通过关键点检测、关键点描述和特征点匹配三个步骤来实现对图像中的特征点进行匹配。
该算法具有尺度不变性和旋转不变性,可以在不同的图像尺度和旋转角度下进行特征点的匹配。
基于SIFT算法的图像拼接技术研究与实现图像拼接技术是指将多张照片合成一张更大的画面,以获取更广阔的视野或更宽广的视角。
这种技术可以用于旅游景点的浏览、建筑物的全景展示等多个领域,因此在现代科技中被广泛使用。
本文将主要介绍使用SIFT算法实现图像拼接的技术原理和应用。
一、SIFT算法简介SIFT(Scale-Invariant Feature Transform)算法可以提取图像中的局部特征并具有旋转不变性和尺度不变性。
这种算法在图像相关应用中非常实用,如图像识别、图像匹配、图像拼接等方面都有广泛的应用。
SIFT算法一般分为以下步骤:1. 尺度空间构建通过利用高斯卷积阶段来判断不同图像之间的尺度差异,将每张照片分成多层尺度的图像金字塔。
2. 关键帧检测在每层尺度中,通过计算高斯差分的方法来检测出图像中的局部极值点,这些极值点被认为是图像的不变特征点。
3. 方向确定在每个不变特征点周围的区域内,确定一个代表性角度作为该点的方向。
4. 关键帧描述在确定了特征点的方向之后,通过建立局部图像的梯度方向直方图,对每个不变特征点进行描述,转化为一个向量。
二、SIFT算法在图像拼接中的应用在图像拼接中,SIFT算法主要用于检测出两张图像中的重叠区域,并对这些区域进行融合。
通常,我们可以通过以下过程来利用SIFT算法进行图像拼接。
1. 特征点检测首先,我们需要分别对每张要拼接的图像进行SIFT算法检测,获得每张图像中的不变特征点。
2. 特征点匹配接下来,我们需要对不变特征点进行匹配,以便找到两张图像中的重叠区域。
这里可以采用诸如RANSAC等算法,去除错误匹配点。
3. 配准和融合最后,经过特征点匹配后,我们可以对两张图像进行配准和融合。
配准通常使用图像变形等方法进行。
融合通常采用平均法、最大值法或者自适应加权融合等不同的方法。
三、SIFT算法图像拼接实例以下是使用SIFT算法进行图像拼接的示例。
我们使用三张图片进行图像拼接。
给定两个点p1与p2的坐标,确定这两点所构成的直线,要求对于输入的任意点p3,都可以判断它是否在该直线上。
初中解析几何知识告诉我们,判断一个点在直线上,只需其与直线上任意两点点斜率都相同即可。
实际操作当中,往往会先根据已知的两点算出直线的表达式(点斜式、截距式等等),然后通过向量计算即可方便地判断p3是否在该直线上。
生产实践中的数据往往会有一定的偏差。
例如我们知道两个变量X与Y之间呈线性关系,Y=aX+b,我们想确定参数a与b的具体值。
通过实验,可以得到一组X与Y 的测试值。
虽然理论上两个未知数的方程只需要两组值即可确认,但由于系统误差的原因,任意取两点算出的a与b的值都不尽相同。
我们希望的是,最后计算得出的理论模型与测试值的误差最小。
大学的高等数学课程中,详细阐述了最小二乘法的思想。
通过计算最小均方差关于参数a、b的偏导数为零时的值。
事实上,在很多情况下,最小二乘法都是线性回归的代名词。
遗憾的是,最小二乘法只适合与误差较小的情况。
试想一下这种情况,假使需要从一个噪音较大的数据集中提取模型(比方说只有20%的数据时符合模型的)时,最小二乘法就显得力不从心了。
例如下图,肉眼可以很轻易地看出一条直线(模式),但算法却找错了。
的输入是一组观测数据(往往含有较大的噪声或无效点),算法 RANSAC通过反复选一个用于解释观测数据的参数化模型以及一些可信的参数。
RANSAC择数据中的一组随机子集来达成目标。
被选取的子集被假设为局内点,并用下述方法进行验证:有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得?出。
用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它?也是局内点。
如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
?然后,用所有假设的局内点去重新估计模型(譬如使用最小二乘法),因为它仅仅?被初始的假设局内点估计过。
最后,通过估计局内点与模型的错误率来评估模型。
SIFT算法原理SIFT算法详细介绍SIFT(Scale-Invariant Feature Transform)算法是一种用于图像特征提取和匹配的算法,被广泛应用于计算机视觉领域。
SIFT算法的核心思想是在不同尺度空间中检测和描述图像的局部特征,通过这些特征可实现图像的匹配、识别和定位。
1.尺度空间极值点检测:首先,SIFT算法通过高斯平滑滤波器构建高斯金字塔,每一层都是由上一层进行降采样得到的。
在不同尺度空间的图像上,通过比较每个像素点与其相邻像素点的灰度值,找出尺度空间极值点,作为关键点候选。
2.关键点定位:通过对尺度空间的极值点进行精确定位,以获取更加准确的关键点。
在关键点候选集合中,利用尺度空间的极值点与梯度方向直方图等局部特征进行过滤,剔除低对比度和边缘响应的关键点。
3.方向分配:为了使SIFT算法具有旋转不变性,需要为每个关键点分配主方向。
采用梯度直方图对关键点周围的图像区域进行统计,找到梯度方向直方图的峰值,作为该关键点的主方向。
4.关键点描述:在每个关键点周围的图像区域内,构建128维的特征向量,用于描述该关键点的局部特征。
通过计算每个像素点周围的梯度幅值和方向,并将其转换为特征向量的模式,构成关键点的描述符。
5.特征匹配:对于待匹配的图像,通过计算两个图像的特征向量之间的欧氏距离,进行特征匹配。
采用距离比值方法,选取最匹配和次匹配之间的距离比值小于预先设定的阈值的特征点,进行最终匹配。
6.特征筛选:通过应用RANSAC(随机抽样一致性)算法,对匹配结果进行筛选,剔除外点,保留内点,从而得到更准确的匹配结果。
SIFT算法的应用非常广泛,常用于目标识别、图像拼接、图像检索、三维重建和运动估计等领域。
在目标识别中,通过提取图像的SIFT特征,并与模板图像进行匹配,可以实现目标的识别和定位。
在图像拼接中,通过寻找多幅图像之间的共同特征点,并根据特征点的位置关系进行配准,可以实现图像的自动拼接。
概率论问题征解报告:
(算法分析类)
SIFT算法与RANSAC算法分析
班级:自23
姓名:***
学号:**********
作业号:146
SIFT 算法是用于图像匹配的一个经典算法,RANSAC 算法是用于消除噪声的算法,这两者经常被放在一起使用,从而达到较好的图像匹配效果。
以下对这两个算法进行分析,由于sift 算法较为复杂,只重点介绍其中用到的概率统计概念与方法——高斯卷积及梯度直方图,其余部分只做简单介绍。
一. SIFT
1. 出处:David G. Lowe, The Proceedings of the Seventh IEEE International Conference
on (Volume:2, Pages 1150 – 1157), 1999 2. 算法目的:提出图像特征,并且能够保持旋转、缩放、亮度变化保持不变性,从而
实现图像的匹配 3. 算法流程图:
原图像
4. 算法思想简介:
(1) 特征点检测相关概念:
◆ 特征点:Sift 中的特征点指十分突出、不会因亮度而改变的点,比如角点、边
缘点、亮区域中的暗点等。
特征点有三个特征:尺度、空间和大小 ◆ 尺度空间:我们要精确表示的物体都是通过一定的尺度来反映的。
现实世界的
物体也总是通过不同尺度的观察而得到不同的变化。
尺度空间理论最早在1962年提出,其主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、角点检测和不同分辨率上的特征提取等。
尺度空间中各尺度图像的模糊程度逐渐变大,能够模拟人在距离目标由近到远时目标在视网膜上的形成过程。
尺度越大图像越模糊。
◆ 高斯模糊:高斯核是唯一可以产生多尺度空间的核,一个图像的尺度空间,L
(x,y,σ) ,定义为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算
高斯函数:
高斯卷积的尺度空间:
不难看到,高斯函数与正态分布函数有点类似,所以在计算时,我们也是依据精度及效率的综合考虑,认为在3σ以外的像素都不起作用,而计算
()()()
,,,,*,L x y G x y I x y
σσ=()22221
()(),,exp 22i i i i x x y y G x y σπσσ⎛⎫-+-=- ⎪
⎝⎭
机实现时,一般取(6σ+1)*(6σ+1)。
颜色直方图与梯度直方图:在视觉算法中,直方图是个经常使用的统计概念。
一般用到的都是颜色直方图。
因一幅图像中,往往少数几种颜色就涵盖了图像
的大多数像素,而且不同颜色在图像中的出现概率是不同的,因此,可以通过
统计图像中各种颜色出现的概率,选出最频繁出现的几种做为主色。
使用主色
并不会降低颜色匹配的效果,因为颜色直方图中出现频率很低的哪些颜色往往
不是图像的主要内容,从某种程度上讲,是对图像内容表示的一种噪声。
在sift
算法中使用的梯度直方图也是差不多的想法,只不过统计的是梯度而不是颜色,因为我们要找的特征点是梯度变化大的点。
(2)特征点匹配
DOG算子计算局部极值点。
中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图
像空间都检测到极值点。
(3)特征点方向分配
确定关键点的方向采用梯度直方图统计法,统计以关键点为原点,一定区域内的图像像素点对关键点方向生成所作的贡献。
(4)特征点的描述
描述子由2×2×8维向量表征,也即是2×2个8方向的方向直方图组成。
左图的种子点由8×8单元组成。
每一个小格都代表了特征点邻域所在
的尺度空间的一个像素,箭头方向代表了像素梯度方向,箭头长度代表该像
素的幅值。
然后在4×4的窗口内计算8个方向的梯度方向直方图。
绘制每
个梯度方向的累加可形成一个种子点。
(5)特征点匹配
一般采用kd树进行完成搜索匹配。
二.RANSAC
1.出处:Martin A. Fischler, Robert C. Bolles, Communication of the ACM CACM
Homepage archive (Volume 24 Issue 6, Pages 381-395), June 1981.
2.算法目的:根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,
得到有效样本数据
3.算法思想介绍:
(1)考虑一个最小抽样集的势为n的模型(n为初始化模型参数所需的最小样本数)和一个样本集P,集合P的样本数#(P)>n,从P中随机抽取包
含n个样本的P的子集S初始化模型M;
(2)余集SC=P\S中与模型M的误差小于某一设定阈值t的样本集以及S构成S*。
S*认为是内点集,它们构成S的一致集;
(3)若#(S*)≥N,认为得到正确的模型参数,并利用集S*采用最小二乘等方法重新计算新的模型M*;重新随机抽取新的S,重复以上过程。
(4)在完成一定的抽样次数后,若未找到一致集则算法失败,否则选取抽样后得到的最大一致集判断内外点,算法结束。
三.程序运行结果图
以下四组图片给出了四种不同情况下的程序运行结果。
黑框中三行分别给出了两幅图的特征点数目及匹配点数目。
图像中红色连线表示计算出来的匹配点。
1.图像稍微偏转
2.图像完全翻转
3.图像大小不同
4.不同光线下的图像。