DJI大疆创新发布雾滴分析仪、“大疆农业”微信服务号
- 格式:pdf
- 大小:629.70 KB
- 文档页数:1

大疆植保机实操教程首先,在操作大疆植保机之前,需要进行相关准备工作。
检查器材的状态,确保无损坏,组装安装好并检查喷雾系统和电子设备是否正常。
同时,确保植保机所需的电池充满电,并正确连接。
接下来,为了保证操作的高效性和安全性,选取适当的时间和天气条件进行植保工作。
选择在风力较小,阳光明媚,无雨的天气进行操作,这样可以避免因风力、雨水等原因导致植保效果不佳。
同时,在操作的同时需要注意人员的安全,尽量避免操作时有人在附近,以免发生意外。
在操作过程中,应严格按照操作手册进行步骤的操作。
首先,校准植保机的姿态和航向,确保植保机在操作过程中可以保持良好的平衡。
然后,根据植保区域的特点,规划好飞行路径。
在规划路径时,要注意避免飞行器接触到树木、电线等障碍物,确保飞行安全。
在起飞前,需要确认航点设置是否正确,并检查所需的农药和水的情况。
同时,确保植保机的液位传感器正常工作,以免因液体不足或过量导致植保效果不佳。
在起飞前,按照大疆植保机的起飞流程操作,确保高度、速度和姿态等参数调整到合适的状态。
在起飞之后,植保机会根据事先设定的航点路径进行自动飞行。
在飞行过程中,需要时刻关注植保机的状态,保证其飞行状态良好,避免飞行器倾斜、姿态不稳定等情况。
同时,要及时观察植保喷洒情况,保证喷洒的农药能够均匀地覆盖到植物表面,提高植保效果。
在任务完成后,需要进行相应的善后处理。
首先,关闭植保机的喷雾装置,确保不会产生农药过量喷洒的情况。
然后,按照大疆植保机的降落流程进行操作,确保安全着陆。
最后,及时整理和清洗植保机,归位存放。
总之,大疆植保机的实操教程需要遵循正确的操作流程,保证操作的高效性和安全性。
只有掌握了合理的操作技巧,才能更好地发挥大疆植保机的植保功能,提高农业生产的效益。
希望以上内容对您有所帮助。

大疆在农业上的应用近年来,随着科技的迅猛发展,无人机技术的应用也越来越广泛。
大疆作为无人机领域的领军企业,不仅在消费级市场上占据主导地位,同时也在农业领域展现出了强大的应用潜力。
一直以来,农业生产都面临着许多挑战,如人力成本高、劳动强度大、作物病虫害防治困难等。
然而,大疆无人机的出现为农业带来了新的解决方案。
无人机可以搭载各种传感器和设备,实现高空遥感、影像采集、数据分析等功能,为农业生产提供精准化的支持。
大疆无人机可以通过高空遥感技术,实时获取农田的影像和数据。
传感器可以对农田进行全方位的扫描,收集土壤质量、植被生长情况、灌溉需求等关键信息。
通过分析这些数据,农民可以及时调整农业生产的策略,提高农作物的产量和质量。
大疆无人机还可以用于农田的病虫害监测和防治。
传统的病虫害监测方法往往需要大量的人力物力投入,而且效果有限。
而无人机搭载的红外相机和光谱仪等设备可以实现全方位、高效率的病虫害监测。
农民可以通过分析无人机拍摄的影像,及时发现病虫害的迹象,并采取相应的防治措施,减少农作物的损失。
大疆无人机还可以用于农田的精准施药。
传统的施药方法往往存在浪费和不均匀的问题,而无人机可以通过搭载精确的喷洒设备,将药剂喷洒到作物表面,实现精准施药。
这不仅可以减少农药的使用量,降低环境污染,还可以提高施药效果,保护农作物的健康生长。
总的来说,大疆在农业上的应用为农民提供了更多的选择和解决方案。
通过无人机的高空遥感、病虫害监测和精准施药等功能,农民可以更加精确地了解农田的情况,提高农作物的产量和质量。
大疆无人机的发展不仅为农业带来了技术创新,也为农民带来了更好的生产条件和经济效益。
未来,随着无人机技术的不断突破和创新,相信大疆在农业领域的应用潜力还会进一步释放。

大疆精灵4航拍测绘操作步骤2018年6月大疆精灵4航拍操作步骤1、在规划航线前需将航飞路径的kml文件导入到Altizure软件中,然后利用Altizure软件规划航线。
通过连接局域网,同样WIFI,打开网址,导入加载。
也可以从QQ导入,步骤如下:(1)选择自动航拍(2)点击开始2018年6月(3)选择设置谷歌地图不用纠偏,高德和苹果地图都要打开纠偏,然后加载KML,设计航线。
(4)进入图层2018年6月(5)勾选导入的kml文件,路径将显示在软件中。
(6)点击,然后选择+,增加XXX线,拖动航线将其覆盖整个路劲区域。
2018年6月相机参数选择,高级选择。
高级设置XXX向重叠率可选择80%-85%,旁向重叠率可选择为70%-%80(风大时重叠率设置大些),单航线设置不得超过2KM,综合考虑权衡效率,如果站在单次任务中央,可以按照2平方公里作为一次航飞任务,较为有利。
(7)将参数设置好的航线保存并命名,航线规划完成2018年6月2、飞控软件连接,连接前需先将飞机螺旋桨连接好,将遥控器通过数据线与平板连接,如下图所示:黑色螺旋桨连接黑色唆使箭头,白色螺旋桨连接白色唆使箭头,连接时将螺旋桨轻轻按下并按所示旋转偏向旋转2018年6月然后打开遥控器,先短按查看电量,然后长按开机然后再将飞机开机,先短按查看电量,再长按开机。
2018年6月3打开大疆DJi飞控软件,软件自动进行飞前检查,检查完毕后会语音提示已获取返航点位置。
起飞地点务必开阔,避免线路和树木等障碍,远离高压线路电磁干扰。
DJI软件连接飞机起飞后,在航线航飞过程中,任务结束前不得再在两款软件中切换查看,任务结束后,才能切换到DJI软件,操控无人机。
2018年6月3、此时再切换到Altizure软件,加载前面已保存并命名的航线,检查参数是否精确,同时选检查飞机进入航路的位置与返来位置是否合适,飞行时长不要超过15分钟,飞机飞完航路返航点需离起飞点间隔比力近,不能连接断开。

大疆创始人汪滔的创业故事大疆是一款无人机的品牌,创立于2006年,由香港科技大学的在读研究生汪滔创立。
下面店铺就带大家一起来详细了解下大疆创始人汪滔的创业故事吧。
大疆创始人汪滔的创业故事_关于大疆汪滔的创业故事他是消费级无人机的行业老大,占据70%的全球市场份额;他是全球无人机行业的第1位亿万富翁。
他在宿舍创立的“大疆创新”正低调的主导着全球无人机革命。
35岁的汪滔,以黑马姿态,拥300亿元身家成为最富有的80后白手起家富豪。
留学被拒、毫无目标,创业从宿舍开始汪滔1980年出生在浙江杭州,因为家境不错,从小喜欢航模的他曾从父亲那里得到过一架遥控直升机。
在他的想象中,直升机像一个可以随意操控的精灵,能悬停在空中不动,也可以想让它飞到哪里就飞到哪里,但实际上根本不是那么回事。
操控难度很高的直升机起飞不久就掉了下来,飞速旋转的螺旋桨还在他手上留下了一个疤痕。
“那时我想做一个能够自动控制直升机飞行的东西出来”,在杭州读完高中,汪滔考入了华东师范大学电子系。
到大三时,不甘平庸的汪滔还是从华东师范大学退了学,并向世界一流大学递上了申请,他的目标是斯坦福和麻省理工,都被拒绝。
最终只有香港科技大学发来了录取通知书,他读了那里的电子及计算机工程学系。
2005 年,25岁,从毫无人生目标,到开始研究遥控直升机的飞行控制系统。
着手准备毕业课题的汪滔决定把遥控直升机的飞行控制系统作为自己的毕业设计题目,他找了两位同学说服老师同意他们的研究方向,而他要解决的核心问题仍然源自童年的梦想——让航模能够自由地悬停。
拿着学校给的经费1.8万元港币,汪滔他们忙乎了大半年,然而在最终的演示阶段,本应悬停在空中的飞机却掉了下来,失败的毕业设计得了一个C,这个很差的成绩甚至让他失去了去欧盟名校继续深造的机会。
幸运的是,汪滔的专注得到了一位教授的认可,得以在香港科技大学继续攻读研究生课程。
读书的同时,他拉着一起做毕业课题的两位同学在深圳创立了大疆创新科技公司,开始专注于直升机飞行控制系统的研发生产。
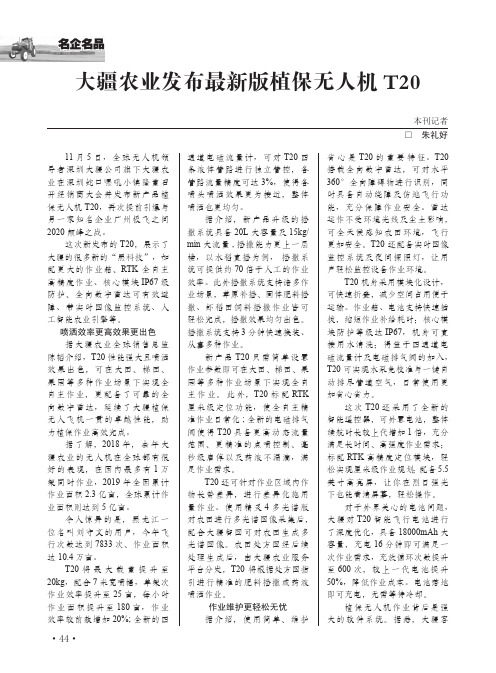
大疆农业发布最新版植保无人机T2011月5日,全球无人机领导者深圳大疆公司旗下大疆农业在深圳蛇口嘿吼小镇隆重召开经销商大会并发布新产品植保无人机T20,再次提前引爆与另一家知名企业广州极飞之间2020颠峰之战。
这次新发布的T20,展示了大疆的很多新的“黑科技”,如配更大的作业箱、RTK 全自主高精度作业、核心模块IP67级防护、全向数字雷达可有效避障、带实时图像监控系统、人工智能农业引擎等。
喷洒效率更高效果更出色据大疆农业全球销售总监陈韬介绍,T20性能强大且喷洒效果出色,可在大田、梯田、果园等多种作业场景下实现全自主作业,更配备了可靠的全向数字雷达,延续了大疆植保无人飞机一贯的卓越性能,助力植保作业高效完成。
据了解,2018年,去年大疆农业的无人机在全球都有很好的表现,在国内最多有1万架同时作业,2019年全国累计作业面积2.3亿亩,全球累计作业面积则达到5亿亩。
令人惊异的是,黑龙江一位名叫刘守文的用户,今年飞行次数达到7833次、作业面积达10.4万亩。
T20将最大载重提升至20kg,配合7米宽喷幅,单架次作业效率提升至25亩,每小时作业面积提升至180亩,作业效率较前款增加20%;全新的四省心是T20的重要特征。
T20搭载全向数字雷达,可对水平360°全向障碍物进行识别,同时具备自动绕障及仿地飞行功能,充分保障作业安全。
雷达运作不受环境光线及尘土影响,可全天候感知农田环境,飞行更加安全。
T20 还配备实时图像监控系统及夜间探照灯,让用户轻松监控设备作业环境。
T20机身采用模块化设计,可快速折叠,减少空间占用便于运输。
作业箱、电池支持快速插拔,缩短作业补给耗时;核心模块防护等级达IP67,机身可直接用水清洗;得益于四通道电磁流量计及电磁排气阀的加入,T20可实现水泵免校准与一键自动排尽管道空气,日常使用更加省心省力。
这次T20还采用了全新的智能遥控器,可外置电池,整体续航时长较上代增加1倍,充分满足长时间、高强度作业需求;标配RTK高精度定位模块,轻松实现厘米级作业规划;配备5.5英寸高亮屏,让你在烈日强光下也能看清屏幕,轻松操作。
大疆创新进军农业领域
作者:夏木
来源:《农机市场》 2015年第12期
夏木
近日,深圳市大疆创新科技有限公司宣布推出一款智能农业喷洒防治无人机———大疆MG-1 农业植保机,这标志着大疆创新正式进入农业无人机领域。
据大疆创新官方介绍,这是一款实现防尘、防水、防腐蚀的工业级设计产品,大疆为其配备了强劲的八轴动力系统,使其载荷达到10 公斤的同时推重比高达1:2.2,每小时作业量可达40至60 亩,作业效率是人工喷洒的40 倍以上。
MG-1 药剂喷洒泵采用高精度智能控制,与飞行速度联动。
在自动作业模式下,可实现定速、定高飞行和定流量喷洒。
据了解,大疆创新成立于2006 年,是全球领先的无人飞行器控制系统及无人机解决方案的研发和生产商,客户遍布全球100 多个国家,截至2014 年底,大疆已占据全球小型无人机约50%的市场份额。
2 © 2022 大疆创新 版权所有阅读提示符号说明 禁止 重要注意事项 操作、使用提示 词汇解释、参考信息前置参考阅读1. 《裁判系统用户手册》2. 裁判系统各模块说明书建议用户首先阅读裁判系统各模块说明书,了解裁判系统各模块的功能以及安装方式,正确安装裁判系统的各模块,再通过《裁判系统用户手册》了解整个裁判系统的功能。
修改日志本手册将在每赛季根据实际情况更新两次。
手册发布后,根据规定日期生效。
日期版本修改记录生效日期 2022.03.29 V1.21. 增加第三方成品模组的限制2. 删除飞镖“R ”标朝上的限制2022.03.28 2022.01.11 V1.11. 明确底盘功率的定义2. 修订机器人整机成品及开源机器人使用规范2022.01.11 2021.10.15V1.0 首次发布 2021.10.15© 2022 大疆创新 版权所有3目录阅读提示 (2)符号说明 (2)前置参考阅读 (2)修改日志 .................................................................................................................................................. 2 1.前言 ................................................................................................................................................ 10 2.技术规范 ........................................................................................................................................ 11 2.1 通用技术规范 .. (11)2.1.1能源 .................................................................................................................................. 11 2.1.2无线电 ............................................................................................................................. 12 2.1.3光学手段 .......................................................................................................................... 12 2.1.4视觉特征 .......................................................................................................................... 13 2.1.5机器人编号 ...................................................................................................................... 13 2.1.6外观设计 .......................................................................................................................... 14 2.1.7发射机构 .......................................................................................................................... 15 2.1.8自定义控制器 .................................................................................................................. 15 2.1.9其它 ................................................................................................................................. 16 2.2 机器人整机成品及开源机器人使用规范 . (17)2.2.1充分再设计 ...................................................................................................................... 17 2.2.2非充分再设计 .................................................................................................................. 18 2.2.3 无效再设计 . (18)2.3 机器人技术规范 (19)2.3.1英雄机器人 ...................................................................................................................... 19 2.3.2工程机器人 ...................................................................................................................... 20 2.3.3步兵机器人 ...................................................................................................................... 22 2.3.4空中机器人 ...................................................................................................................... 24 2.3.5哨兵机器人 ...................................................................................................................... 26 2.3.6飞镖系统 .......................................................................................................................... 27 2.3.7 雷达 ................................................................................................................................. 31 3.裁判系统安装规范 .......................................................................................................................... 33 3.1概述 ........................................................................................................................................ 33 3.2机器人裁判系统配置 ............................................................................................................... 34 3.3 主控模块安装规范 (35)3.3.1 安装步骤 (36)3.3.2安装要求 (37)3.4电源管理模块安装规范 (38)3.4.1安装步骤 (39)3.4.2安装要求 (41)3.5灯条模块安装规范 (43)3.5.1安装步骤 (44)3.5.2安装要求 (45)3.6装甲模块安装规范 (46)3.6.1通用 (48)3.6.2安装步骤 (51)3.6.3安装要求 (56)3.6.4ID编号设置 (58)3.7测速模块安装规范 (59)3.7.1安装步骤 (60)3.7.2安装要求 (65)3.8场地交互模块安装规范 (66)3.8.1安装步骤 (67)3.8.2安装要求 (68)3.8.3场地交互模块卡 (68)3.9相机图传模块(发送端)安装规范 (68)3.9.1安装步骤 (69)3.9.2安装要求 (70)3.10相机图传模块(接收端)安装规范 (70)3.10.1安装要求 (71)3.11定位模块安装规范 (71)3.11.1安装步骤 (72)3.11.2安装要求 (72)3.1217mm荧光弹丸充能装置安装规范 (73)3.12.1安装步骤 (74)3.12.2安装要求 (75)3.12.3自制紫外灯板指导及要求 (76)3.13超级电容管理模块安装规范 (76)3.13.1安装步骤 (76)3.13.2安装要求 (78)附录一17mm 测速模块转接块工程图 (79)4 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有5 附录二 参考图纸 (80)表目录表2-1 控制方式汇总 (12)表2-2 自定义控制器制作参数说明 (15)表2-3 英雄机器人制作参数说明 (19)表2-4 工程机器人制作参数说明 (20)表2-5 步兵机器人制作参数说明 (22)表2-6 空中机器人制作参数说明 (24)表2-7 哨兵机器人制作参数说明 (26)表2-8 飞镖制作参数说明 (28)表2-9 飞镖发射架制作参数说明 (28)表2-10 雷达运算平台端制作参数说明 (31)表2-11 雷达传感器端参数说明 (31)表3-1 裁判系统组成模块 (33)表3-2 机器人裁判系统模块配置 (34)表3-3 电源管理模块接口对照 (42)6 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有7图目录图 2-1 平衡步兵机器人示意图 (23)图 2-2 航行外观灯有效区域 (26)图 2-3 飞镖触发装置示意图 (29)图 2-4 飞镖触发装置遮挡示意图 (30)图 2-5 飞镖触发装置内部空腔遮挡示意图 (30)图 3-1 主控模块示意图 (36)图 3-2 主控模块安装示意图 (36)图 3-3 主控模块连线示意图 (37)图 3-4 主控模块安装位置示意图 (38)图 3-5 电源管理模块示意图 (39)图 3-6 电源管理模块安装示意图 (40)图 3-7 电源管理模块接口示意图 (41)图 3-8 电源管理模块接线示意图 (41)图 3-9 灯条模块示意图 (44)图 3-10 灯条模块安装示意图 (45)图 3-11 灯条模块底部示意图 (45)图 3-12 灯条模块接线示意图 (45)图 3-13 哨兵机器人灯条模块示意图 (46)图 3-14 指定装甲支撑架示意图 (47)图 3-15 小装甲模块示意图 (47)图 3-16 大装甲模块示意图 (48)图 3-17 机器人坐标系示意图 (48)图 3-18 机器人不同底盘形态X 轴示意图 (49)图 3-19 装甲模块受力示意图 (50)图 3-20 机器人保护示意图 (51)图 3-21 底盘预留孔位 (52)图 3-22 装甲支撑架安装示意图 (52)图 3-23 装甲模块安装示意图 (53)图 3-24 装甲模块连线示意图 (53)图 3-25 底盘预留孔位示意图 (54)图 3-26 装甲支撑架安装示意图 (54)图 3-27 装甲模块安装示意图 (55)图 3-28 底盘预留孔位示意图 (55)图3-29 哨兵支撑架安装示意图 (56)图3-30 哨兵装甲安装示意图 (56)图3-31 地面机器人装甲模块ID设置示意图 (59)图3-32 17mm测速模块示意图 (60)图3-33 42mm测速模块示意图 (60)图3-34 17mm枪管示意图 (61)图3-35 测速模块安装示意图 (62)图3-36 17mm转接块零件示意图 (62)图3-37 17mm转接块固定方式示意图 (63)图3-38 17mm短枪管安装示意图 (64)图3-39 42mm枪管示意图 (65)图3-40 测速模块安装规范示意图 (66)图3-41 场地交互模块示意图 (67)图3-42 场地交互模块连线示意图 (67)图3-43 场地交互模块安装示意图 (67)图3-44 场地交互模块卡示意图 (68)图3-45 相机图传模块(发送端)示意图 (69)图3-46 相机图传模块(发送端)安装示意图 (70)图3-47 相机图传模块(接收端)示意图 (71)图3-48 定位模块示意图 (71)图3-49 定位模块安装示意图 (72)图3-50 定位模块连线示意图 (72)图3-51 定位模块安装示意图 (73)图3-52 17mm荧光弹丸充能装置示意图 (74)图3-53 紫外灯板安装示意图 (75)图3-54 电容管理模块接线示意图 (77)8 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有9附录图目录附录图 1 工程机器人装甲贴纸 - 2号 (80)附录图 2 步兵机器人装甲贴纸 - 3号 (80)附录图 3 步兵机器人装甲贴纸 - 4号 (81)附录图 4 步兵机器人装甲贴纸 - 5号 (81)附录图 5 英雄机器人装甲贴纸 - 1号 (82)附录图 6 平衡步兵机器人装甲贴纸 - 3号 (82)附录图 7 平衡步兵机器人装甲贴纸 - 4号 (83)附录图 8 平衡步兵机器人装甲贴纸 - 5号 (83)附录图 9 前哨站装甲贴纸 (84)附录图 10 基地小装甲贴纸 (84)附录图 11 哨兵机器人装甲贴纸 (85)附录图 12 基地大装甲贴纸 (85)1. 前言RoboMaster参赛队伍需自行研发和制作参赛机器人,参赛机器人需满足本文档描述的所有规范,否则无法通过赛前检录。
大疆精灵4rtk雾天作业大疆精灵4 RTK(Real-Time Kinematic)是一款专为测绘、建筑、农业等行业设计的多旋翼无人机。
它具备高精度定位系统、强大的飞行控制系统和智能飞行模式,可以在各种复杂环境下进行精确测绘和航拍任务。
本文将着重探讨大疆精灵4 RTK在雾天条件下的应用。
雾天作业对于无人机来说是一个相当具有挑战性的任务。
由于能见度低,飞行安全成为首要考虑因素。
然而,大疆精灵4 RTK凭借其卓越的飞行性能和定位系统,能够在雾天环境下稳定飞行,并完成高质量的任务。
大疆精灵4 RTK配备了高精度定位系统,可以实时获取无人机的位置和姿态信息。
这使得无人机在雾天情况下能够更准确地进行定位和导航,从而避免了飞行偏差和碰撞的风险。
此外,大疆精灵4 RTK还支持RTK技术,即实时动态差分定位技术,可以提供厘米级的定位精度,进一步提高了飞行安全性。
大疆精灵4 RTK具备强大的飞行控制系统,可以根据实时飞行数据进行智能调整和优化。
在雾天情况下,无人机的传感器很容易受到雾气的影响,导致飞行不稳定甚至失控。
然而,大疆精灵4 RTK通过飞控系统的精确控制和飞行模式的智能选择,能够保持稳定的飞行姿态,确保任务的顺利完成。
大疆精灵4 RTK还提供了多种智能飞行模式,进一步增加了在雾天环境下的作业灵活性和安全性。
例如,它可以通过预设航线模式,根据事先设定的航线自动飞行,从而避免了飞行员在雾天情况下的操作风险。
同时,大疆精灵4 RTK还支持智能避障功能,能够在飞行过程中自动识别障碍物并避让,避免了与建筑物、电线杆等障碍物的碰撞。
除了以上的优势,大疆精灵4 RTK还可以通过搭载的相机进行高清航拍和测绘任务。
相机的图像传输功能可以实时传输图像到地面站,飞行员可以通过地面站实时监控飞行画面,确保任务的有效执行。
同时,大疆精灵4 RTK还支持多角度、多方向的拍摄,可以根据实际需求进行灵活调整,获得更加全面和准确的图像数据。
主要更新【P4A】1.支持固件升级功能。
2.支持数据上传功能。
3.支持飞行数据功能。
4.支持视觉标定校准功能。
5.支持模拟器功能。
【DataLink3】1.支持固件升级功能。
【M200,M210,M210-RTK】1.支持固件升级功能。
2.支持数据上传功能。
3.支持飞行数据功能。
4.支持视觉标定校准功能。
5.支持SDK功能。
(M210,M210-RTK专有)【DJI Goggles】1. 新增数据上传功能。
【Esc Snail】1.修复UI BUG。
【A3/N3】1.新增固件升级页面电调热插拔功能。
2.修复UI BUG。
3.新增支持DataLink3遥控器。
4.新增升级前弹窗提示卸掉旋翼功能。
5.新增电机逐个启动过程可以配置功能。
7.新增lowpass用户可配置功能。
【A3_AG & N3_AG】1.修复遥控器档位显示不一致的问题。
2.修复农业功能页面的开关和限高限远的开关不一致的问题。
【MG-1S】1.支持工具->白名单解禁功能。
【D-RTK】1.修改RTK设置页面文案。
【通用】1.新增账户登录验证码校验功能。
主要更新【Ronin-MX - SRW-60G】新增支持Ronin-MX - SRW-60G固件升级功能。
【A3_AGR,N3_AGR】新增支持电调升级功能。
【通用】解决调参1.1.0版本驱动安装失败的问题。
主要更新【A3_AGR,N3_AGR】1.优化基础设置->遥控器:飞行模式设置功能。
2.新增基础设置->遥控器:支持DataLink3设备。
3.新增飞行设置->农业应用:默认速度档位设置功能。
4.新增飞行设置->农业应用:M+功能开关。
5.新增飞行设置->农业应用:M+默认速度开关。
6.新增飞行设置->感度:水平速度感度设置。
7.新增工具->备份功能。
8.去除SDK功能页面。
【MG-1S】1.去除基本设置->遥控器->操控EXP:最大上升速度,最大姿态角,最大偏航角速度,最大下降速度。
多旋翼飞行器入门1、DJI产品的发展历程(一)“精灵”系列2013年12月16号PHANTOM2新产品发布精灵3 是深圳市大疆创新科技有限公司(DJ-Innovations,简称DJI)在2015年4月8 日推出的一款微小型一体航拍无人机。
2016年3月2日深圳市大疆创新科技有限公司在纽约正式发布产品—大疆精灵Phantom 4图1-1 “精灵”(二)“御”系列2018年8月23日,DJI大疆创新在纽约发布“御”Mavic 2 系列无人机,包括“御”Mavic 2 专业版及“御”Mavic 2 变焦版两款。
图1-2 “御”(三)“悟”系列2014年11月13日,在旧金山金银岛上,DJI正式发布了一款消费级无人机“悟”图1-3 “悟”(四)“晓”系列“晓”Spark是DJI大疆创新于2017年5月在美国纽约召开新品发布上,正式推出的全新无人机,这也是大疆第一款迷你型掌上无人机。
图1-4 “晓”2、国内外多旋翼飞行器行业应用2.1农业我国是传统农业大国,耕地面积超过20亿亩。
随着农村劳动力短缺问题的凸显,农村土地集约化管理的加快,农业机械化和自动化引起了国家有关部门的重视。
2015年5月,国务院印发《中国制造2025》,全面推进制造强国战略。
在这份行动纲领中,农机装备与航空航天装备、生物医药、新材料等一起被列入十大重点发展领域。
在全国倡导机械化、自动化的大环境下,植保无人机迎来了广阔的发展空间。
我国的农业机械化率超过60%,但就无人机的应用水平而言,与发达工业国家相比还存在一定差距。
日本在用植保无人机3000多架,入手超过14000人。
仅Yamaha一家企业就有130多家培训学校,负责和从事水稻等无人机作业的组织超过1000个,且形成了规范的行业服务体系。
而我国的农业植保无人机尚处于起步阶段,据统计,2014年我国植保无人机保有量为695架,总作业面积426万亩;2015年我国植保无人机保有量为2324架(31个省统计),总作业面积1152.8万亩,增长幅度分别为234%、170.6%。