自整角机结构、工作原理
- 格式:ppt
- 大小:2.04 MB
- 文档页数:5
自整角机工作原理自整角机是一种用于自动测量和修整角度的设备。
它广泛应用于建筑、制造业、航空航天等领域,能够提高工作效率和精度。
本文将介绍自整角机的工作原理和应用。
我们来了解一下自整角机的结构。
自整角机主要由支架、测量装置、控制系统和修整装置组成。
支架是用于固定和支撑整个设备的框架,测量装置用于测量角度,控制系统用于处理测量数据并控制修整装置进行调整。
自整角机的工作原理可以简单地分为三个步骤:测量、分析和修整。
首先,测量装置通过激光、电子传感器或光电传感器等技术测量出待测角度的数值。
测量装置将测量到的数据传输给控制系统进行分析。
控制系统接收到测量数据后,会根据设定的目标角度和精度要求进行分析。
控制系统会计算出待测角度与目标角度之间的差异,并根据差异的大小和方向来判断修整方向。
控制系统会生成修整指令,并将其传输给修整装置。
修整装置根据控制系统的指令进行调整。
修整装置可以是驱动机构、液压装置或电动机等,用于实现对待测物体的调整。
修整装置会根据控制系统的指令,按照设定的修整步骤和修整量对待测物体进行微调或大范围调整,以使待测角度逐渐接近目标角度。
自整角机的工作原理看似简单,但实际上需要精确的测量和控制技术的支持。
测量装置需要具备高精度和高稳定性,以确保测量结果的准确性。
控制系统需要具备强大的计算和分析能力,能够处理大量的测量数据,并根据结果生成修整指令。
修整装置需要具备高精度的运动控制能力,能够按照指令进行微调或大范围调整。
自整角机的应用十分广泛。
在建筑领域,自整角机可以用于测量和修整建筑物的角度,使建筑物的结构更加稳定和均衡。
在制造业中,自整角机可以用于测量和修整零件的角度,以确保产品的质量和精度。
在航空航天领域,自整角机可以用于测量和修整飞行器的角度,以确保飞行器的飞行稳定性和安全性。
自整角机通过测量、分析和修整的过程,能够自动化地测量和修整角度。
它在建筑、制造业、航空航天等领域发挥着重要的作用,提高了工作效率和精度。
自整角机工作原理
自整角机是一种常见的机械设备,广泛应用于各种行业中。
它的主要作用是将板材或管材进行角度调整,以满足不同的加工需求。
那么,自整角机的工作原理是什么呢?
自整角机的工作原理可以简单地概括为:通过机械力的作用,将板材或管材弯曲到所需的角度。
具体来说,自整角机主要由以下几个部分组成:
1. 机架:支撑整个设备的主体结构,通常由钢板焊接而成,具有足够的强度和稳定性。
2. 上下模具:分别位于机架的上部和下部,用于夹紧板材或管材,并施加弯曲力。
3. 液压系统:通过液压油缸提供弯曲力,控制上下模具的运动。
4. 控制系统:用于控制液压系统的工作,实现自动化操作。
当需要对板材或管材进行角度调整时,首先将其放置在自整角机的上下模具之间,然后启动液压系统,使上下模具夹紧材料。
接着,液压
系统开始施加弯曲力,使材料弯曲到所需的角度。
最后,停止液压系
统的工作,松开上下模具,取出已经完成角度调整的材料。
需要注意的是,自整角机的工作原理虽然简单,但在实际操作中需要
注意以下几点:
1. 材料的选择:不同的材料具有不同的强度和韧性,需要根据实际情
况选择合适的材料。
2. 弯曲角度的控制:液压系统需要精确控制弯曲力的大小和持续时间,以确保弯曲角度的精度和一致性。
3. 安全操作:自整角机涉及到高压液压系统和机械力的作用,需要严
格遵守安全操作规程,确保操作人员的安全。
总之,自整角机是一种常见的机械设备,其工作原理简单明了,但在
实际操作中需要注意各种细节,以确保操作的安全和效率。
自整角机工作原理
自整角机是一种常见的数控机床,它的工作原理是通过数控系统控制机床的运动,实现对工件进行加工。
自整角机主要用于对金属板材进行切割、折弯、成型等加工,广泛应用于航空、汽车、电子、建筑等领域。
自整角机的工作原理可以分为以下几个步骤:
1. 设计加工程序:首先,操作人员需要根据工件的要求,设计出相应的加工程序。
这个过程通常是通过计算机辅助设计软件完成的,可以实现对工件的三维建模、切割路径规划等操作。
2. 加载工件:将待加工的金属板材放置在机床工作台上,并通过夹具固定住。
这个过程需要注意工件的位置和方向,以确保加工的精度和质量。
3. 调整机床参数:根据加工程序的要求,操作人员需要对机床的参数进行调整。
这些参数包括切割速度、切割深度、刀具半径等,可以通过数控系统进行设置。
4. 开始加工:当机床参数设置完成后,操作人员可以启动机床,开始加工。
在加工过程中,数控系统会根据加工程序的要求,控制机床的运动轨迹和刀具的位置,实现对工件的切割、折弯、成型等操作。
5. 完成加工:当加工完成后,机床会自动停止运动。
操作人员可以将加工好的工件取下,并进行检查和质量控制。
总的来说,自整角机的工作原理是通过数控系统控制机床的运动,实现对金属板材进行加工。
这种机床具有加工精度高、生产效率高、操作简单等优点,是现代制造业中不可或缺的设备之一。
自整角机的工作原理
自整角机是一种用于调整和矫正眼镜框架的设备。
它的工作原理主要包括以下几个步骤:
1. 夹住眼镜框架:将眼镜框架的两个眼镜腿夹住,并确保夹紧力度适中,不会对框架造成损害。
2. 定位参考点:通过调整机器的定位器,使机器能准确地识别眼镜框架的各个关键点,如鼻托位置、镜腿长度等。
3. 框架矫正:根据定位器的数据,自整角机会根据设定的参数和算法,对眼镜框架进行自动或半自动矫正。
矫正包括框架的整体调整和镜腿的调整,以确保框架的形状符合人的脸型,并且能够正确地适应使用者的鼻梁和耳朵。
4. 检测和确认:矫正完成后,自整角机会对眼镜框架进行检测,以确保矫正的效果达到要求。
这可能包括检测框架的鼻托位置和距离、镜腿的长度和弯曲度等。
5. 可选的其他功能:一些自整角机还可以具备其他功能,如清洁镜片、调整镜片倾斜度或旋转角度等。
总的来说,自整角机通过夹紧眼镜框架,并利用定位器和算法对眼镜框架进行自动或半自动的矫正,以确保眼镜框架的形状和调整符合人的需求,提供更好的佩戴体验和视觉效果。
自整角机工作原理自整角机是一种常见的工业机械设备,它的工作原理是通过机械结构以及电子控制系统的配合,实现对金属材料进行整形加工的过程。
本文将从机械结构和电子控制系统两个方面来详细介绍自整角机的工作原理。
一、机械结构自整角机的机械结构主要包括机架、辊子、定位装置和压力系统等部分。
机架是整个设备的基础,承载着整个设备的工作负荷。
辊子是自整角机的关键部件,用于将金属材料进行整形加工。
定位装置的作用是确保金属材料的精确定位,以保证加工的准确性。
压力系统则用于提供加工所需的压力,保证整个加工过程的顺利进行。
自整角机的工作过程中,金属材料首先通过定位装置进行精确定位,然后被辊子夹紧。
接下来,压力系统提供所需的压力,使辊子对金属材料施加一定的力,使其发生塑性变形。
辊子的旋转运动将金属材料逐渐弯曲成所需的角度。
整个加工过程中,机架保持稳定,以确保加工的精度和质量。
二、电子控制系统自整角机的电子控制系统主要包括PLC控制器、传感器和执行器等部分。
PLC控制器是整个系统的大脑,通过程序控制各个执行器的动作,实现对整个加工过程的控制。
传感器用于实时检测加工过程中的各种参数,如金属材料的位置、角度、压力等,将这些信息传输给PLC控制器。
执行器则根据PLC控制器的指令,控制机械结构的运动,实现加工过程的自动化。
自整角机的工作过程中,PLC控制器根据预设的程序,通过传感器实时获取金属材料的位置和角度等信息。
根据这些信息,PLC控制器计算出所需的辊子的运动轨迹和压力大小,并通过执行器控制辊子的运动和压力的施加,实现对金属材料的整形加工。
整个过程中,PLC控制器可以根据需要进行参数的调整,以适应不同的加工要求。
自整角机的工作原理是通过机械结构和电子控制系统的配合,实现对金属材料进行整形加工的过程。
机械结构通过辊子、定位装置和压力系统等部分,实现金属材料的夹紧、塑性变形和加工角度的控制。
电子控制系统通过PLC控制器、传感器和执行器等部分,实现对加工过程的自动化控制。
自整角机是用于无机械连接的转角位置传递系统,或传递与转角位置相应的电信号系统的交流微电机。
其输出电信号是转子转角位置的函数,或转子转角位置是输入电信号的函数。
根据在转交位置传递系统中的应用,按结构、原理的特点可将自整角机分为控制式、立矩式、霍尔式、多机式、固态式、无接触式和四线式等,而前两种是最常用的运行方式。
按照使用要求可分为控制式和力矩式自整角机两大类。
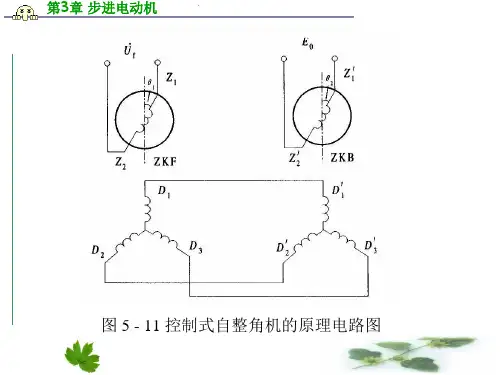
控制式自整角机又分为控制式自整角发送机(ZKF)、控制式差动自整角发送机(ZKC)、控制式自整角变压器(ZKB);力矩式自整角机又分为力矩式自整角发送机(ZLF)、力矩式差动自整角发送机(ZCF)、力矩式自整角接收机(ZLJ)和力矩式差动自整角接收机(ZCJ)。
各类自整角机结构基本相同,分别有电刷、集电环、定子绕组、定子铁心、转子铁心、机壳、转子绕组和轴承组成。
自整角机的工作原理如下:(1)自整角发送机和接收机的定子(S1~S3)与三相交流电机相似,有三个星形连接的整步绕组;转子(R1~R2)一般为凸极上面置放单相激磁绕组,极靴上的槽孔安放阻尼绕组的短路条。
当阻尼绕组不足以消除震荡时,接收机需要采用机械阻尼器。
(2)自整角变压器的三相绕组通常安放在定子(S1~S3)上,而转子(R1~R2)一般为隐极铁心,上面仅放置一个单线输出绕组。
(3)力矩式差动自整角发送机、力矩式差动自整角接收机、控制式差动自整角发送机的定子(S1~S3)和转子(R1~R3)上都安放三相绕组,一般定子为原端,转子为副端。
控制式自整角机输出电信号,通过系统中的放大器和伺服电动机等来带动负载,在精度较高的信号传输系统中作检测元件。
力矩式自整角机用来带动指针、刻度盘等轻负载,在精度较低的力矩传输系统中作指示器。
无论自整角机作力矩式运行或者是控制式运行,在自动控制系统中通常必须是两个或者两个以上组合起来才能使用。
若成对使用的自整角机按力矩式运行时,其中有一个是力矩式发送机,另一个则是力矩式接收机;而成双使用的自整角机按控制式运行时,其中必然有一个是控制式发送机,另一个则是控制式变压器。
自整角机的工作原理自整角机是一种常见的机械设备,广泛应用于建筑、制造、航空和汽车工业等领域。
它的主要功能是将金属或非金属材料的角度进行修整,使其达到预期的形状和规格。
在本文中,我们将探讨自整角机的工作原理以及其在工业中的应用。
自整角机是由机械构件、液压系统、电气控制系统等组成的复杂设备。
它的工作原理主要是通过一系列的步骤来实现角度修整。
首先,材料被放置在机械构件中的夹具上。
夹具被设计成能够固定材料并保持其稳定性,以便进行后续的加工操作。
接下来,液压系统开始发挥作用。
液压系统是自整角机的核心部分,它通过液压油的压力来产生足够的力量,以使角度得到修整。
液压系统中的液压泵会将液压油从液压油箱中吸入,然后通过管道输送到液压缸中。
液压泵产生的压力使得液压缸的活塞向外伸出,施加力量到夹具上的材料上。
材料受到施加的力量后,会发生弹性和塑性变形。
在弹性变形过程中,材料会稍微弯曲,但在去掉外力后可以恢复到原来的形状。
而在塑性变形过程中,材料则会保持变形的形状。
当施加的力量被去掉后,液压系统的液压泵将停止工作,压力也会减小。
此时,夹具上的材料会开始恢复到其原始形状,但由于塑性变形的发生,材料的角度会有微小的变化。
为了达到预期的角度要求,需要进行多次循环操作。
每次循环中,施加的力量会使材料进行微小的变形,直到达到所需的角度。
在每次循环之后,材料会通过夹具上的指示器进行检查,以确保达到所需的角度。
自整角机的可靠性和精确性取决于其液压系统和控制系统的性能。
液压系统必须能够产生足够的力量,以对材料进行准确的角度修整。
而控制系统则需要能够准确地控制液压系统的工作,以确保每次循环中力量的施加和去除都能够精确到位。
在工业应用中,自整角机被广泛用于金属制造、航空制造、汽车制造等领域。
它可以对金属材料进行弯曲、翻边、折叠等加工操作,以满足不同行业对于材料角度的要求。
总结起来,自整角机是一种通过液压系统施加力量来修整材料角度的机械设备。
力矩式自整角机工作原理及应用一、工作原理1.传感器测量力矩:力矩传感器采用一种特殊的结构,当受到力矩作用时,传感器会产生相应的位移或变形。
传感器通过测量这一位移或变形来得到受到的力矩大小。
2.控制器分析输入信号:传感器测量到的位移或变形信号被传输到控制器中,控制器会根据输入的信号进行分析和处理,并计算出当前物体的力矩大小。
3.电动机自动调整:控制器会将计算得出的力矩大小与预设的目标力矩进行比较,如果两者不一致,控制器会根据差异的大小和方向来控制电动机的转动。
电动机通过改变输出的力矩来使物体保持在平衡的状态。
4.执行机构调整物体:根据电动机的转动,执行机构会相应地调整物体的位置或角度,使物体受到的力矩等于目标力矩,从而达到自动调整的效果。
二、应用领域1.机器人:力矩式自整角机在机器人中起到非常重要的作用。
通过测量机器人关节处的力矩,控制器可以精确地调整机器人的姿态和位置,使其保持平衡或完成特定动作。
2.汽车悬挂系统:力矩式自整角机可以用于汽车悬挂系统中,通过测量车轮受到的力矩来实现自动调整。
这可以提高车辆的稳定性和行驶舒适度。
3.航空航天领域:在航空航天领域中,力矩式自整角机可以应用于飞机和航天器的姿态控制。
它可以通过测量受到的力矩来调整飞机或航天器的姿态,并保持它们的稳定性和平衡。
4.医疗领域:力矩式自整角机可以应用于医疗设备中,如手术机器人和康复设备。
通过测量受到的力矩,可以帮助医生或康复师调整机器人或设备的姿态,准确地进行手术或康复治疗。
5.工业生产:力矩式自整角机还可以应用于工业生产中的自动化系统。
它可以通过测量工业设备受到的力矩,实现设备的自动调整和控制,提高生产效率和产品质量。
6.体育训练:力矩式自整角机可以应用于体育训练中,如体操、滑雪和击球运动等。
通过测量运动员受到的力矩,可以帮助教练和运动员调整姿态和动作,提高训练效果和竞技表现。
总之,力矩式自整角机通过测量物体受到的力矩并自动调整,可以应用于多个领域,实现力矩的精确测量和自动控制,提高系统的稳定性和性能。
自整角机工作原理
自整角机是一种能够自动调整角度的机械设备,其工作原理是通过激光测距和电动机的控制,实现对角度的精准调整。
自整角机广泛应用于建筑、测绘、航空等领域,能够提高工作效率和准确性。
自整角机的工作原理可以简单概括为以下几个步骤:激光测距、计算角度、控制电动机、调整角度。
自整角机通过激光测距技术获取目标物体与自身的距离。
激光发射器发射出一束激光,并通过光电二极管接收激光反射回来的信号,根据光的传播速度和信号的时间延迟计算出目标物体与自身的距离。
接着,自整角机根据测得的距离和设定的参考点,计算出目标物体与参考点之间的角度。
通过激光测距仪内部的算法,将距离转化为角度,并将计算结果传输给控制系统。
然后,控制系统根据计算得到的角度,通过电动机控制机械结构的旋转,使其达到设定的角度。
电动机根据控制信号转动,带动机械结构的旋转,使得自整角机的角度得到精确调整。
自整角机完成角度调整后,可以进行下一步的工作。
例如,在建筑领域中,自整角机可以用于测量建筑物的角度,确保建筑物的垂直度和水平度;在测绘领域中,自整角机可以用于测量地形地貌的角度,提供准确的地理信息;在航空领域中,自整角机可以用于飞行器的导航和姿态控制,确保飞行的稳定性和安全性。
自整角机通过激光测距和电动机的控制,实现对角度的自动调整。
其工作原理简单明了,通过精确的测量和计算,实现对目标物体与参考点之间角度的准确调整。
自整角机的应用广泛,可以提高工作效率和准确性,对于建筑、测绘、航空等领域具有重要意义。