信号与系统的公式汇总分类
- 格式:pdf
- 大小:221.04 KB
- 文档页数:8
信号与系统重点概念及公式总结:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
⎰T 1 11i信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设 C 为复数,a 、b 为实数。
常数形式的复数 C=a+jb a 为实部,b 为虚部;或 C=|C|e j φ,其中,| C |=复数的辐角。
(复平面)a 2 +b 2 为复数的模,tan φ=b/a ,φ为2.欧拉公式:e jwt= cos wt +j sin wt (前加-,后变减)第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合F = { f 1 (t ), f 2 (t ), f n ( t )}T 21如果满足: T 2f i (t ) f 2j (t )dt = 0i ≠ j ⎰Tf i (t )dt = K ii = 1,2 n 则称集合 F 为正交函数集如果K i = 1i = 1,2, n ,则称 F 为标准正交函数集。
如果 F 中的函数为复数函数T 2f (t) ⋅ f * (t )dt = 0i ≠ j⎰T i j条件变为: T2*⎰T f i (t ) ⋅ f i (t )dt = K ii = 1,2 n其中 f *(t ) 为 f i (t) 的复共轭。
2.正交函数集的物理意义: 一个正交函数集可以类比成一个坐标系统; 正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点; 点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数2 1 11 1 1t 222**在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交 集是完备的,否则称该正交集是不完备的。
如 果 在 正 交 函 数 集 g 1 (t ), g 2 (t ), g 3 (t ), g n(t ) 之 外 , 不 存 在 函 数 x ( t )t 20 < ⎰ x 2(t )dt < ∞ ,满足等式: ⎰x (t )g (t )dt = 0 ,则此函数集称为完备正交函数集。

信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
信号与系统-公式总结信号与系统是电子信息类专业中的一门核心课程,主要研究信号的产生、变换、传输和处理过程,以及系统对信号的响应和处理。
信号与系统的学习需要掌握大量的数学知识和公式,下面就是信号与系统中一些重要的公式总结。
1. 信号的分类和表示:- 狄拉克脉冲函数:δ(t)- 单位阶跃函数:u(t)- 奇函数和偶函数性质:x(t) = x(-t) 和 x(t) = -x(-t)- 周期信号的频率和周期关系:f = 1/T2. 傅里叶变换:- 连续时间傅里叶变换(CTFT):X(jω)= ∫[−∞,∞]x(t)e^(-jωt)dt- 傅里叶反变换:x(t) = (1/2π) ∫[−∞,∞]X(jω)e^(jωt)dω- 周期信号的傅里叶级数展开:x(t) = ∑[k=−∞,∞]c(k)e^(jωk0t) - 频谱为实数的信号的性质:X(jω) = X*(−jω)3. 拉普拉斯变换:- 连续时间拉普拉斯变换(CTLT):X(s) = ∫[−∞,∞]x(t)e^(-st)dt- 拉普拉斯反变换:x(t) = (1 / 2πj) ∫[σ-j∞,σ+j∞]X(s)e^(st)ds- 零极点的性质:如果x(t)的拉普拉斯变换X(s)的极点位于左半平面,那么系统是稳定的。
4. Z变换:- 离散时间Z变换(DTZT):X(z) = ∑[n=−∞,∞]x(n)z^(-n) - Z反变换:x(n) = (1 / 2πj) ∮ X(z)z^(n-1)dz- 零极点的性质:如果X(z)的极点的模都小于1,则系统是稳定的。
5. 系统函数和频率响应:- 系统函数:H(s) = Y(s) / X(s) = L{h(t)}- 系统函数的零极点分解:H(s) = (s-z1)(s-z2)...(s-zn) / (s-p1)(s-p2)...(s-pm)- 频率响应:H(jω) = |H(jω)|e^(jφ(ω))6. 系统的时域响应和频域响应:- 系统的单位冲激响应:h(t) = L^{-1}{H(s)} 或 h(n) = Z^{-1}{H(z)}- 系统的频域响应:H(s) = ∫[−∞,∞]h(t)e^(-st)dt 或 H(z) =∑[n=−∞,∞]h(n)z^(-n)7. 信号的卷积运算:- 连续时间信号的卷积:y(t) = x(t) * h(t) = ∫[−∞,∞]x(t-τ)h(τ)dτ - 离散时间信号的卷积:y(n) = x(n) * h(n) = ∑[k=-∞,∞]x(k)h(n-k)8. 频域中的乘法和卷积:- 频域乘法:y(t) = x(t)h(t) = x(t) ⊗ h(t)- 频域卷积:y(t) = x(t) * h(t) = X(jω)H(jω)9. 系统的稳定性:- 连续时间系统的稳定性:系统零极点的实部都小于0时,系统是稳定的。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
信号与系统公式汇总分类信号与系统是电子信息工程、自动化、计算机科学等学科的重要基础课程,是研究和分析信号在系统中的变换、传递及其对系统特性的影响的一门学科。
信号与系统涉及到的知识点较多,包括信号的表示与描述、连续与离散信号、线性时不变系统、傅里叶变换与频谱分析等方面。
以下是信号与系统中常用的公式汇总分类:一、信号的表示与描述1.单位阶跃函数:u(t)=1,当t>=0;u(t)=0,当t<0。
2.单位冲激函数:δ(t) = du(t)/dt。
3.周期信号的傅里叶级数:x(t) = A0/2 + ∑(An*cos(nωt) + Bn*sin(nωt))。
4.脉冲信号:δ(t) = lim_{n→∞} [rect(t/T)/T],其中rect(t/T)为矩形函数。
二、连续信号与离散信号1.连续时间冲激响应h(t)与输入信号x(t)之卷积:y(t)=∫[x(τ)*h(t-τ)]dτ。
2.离散时间冲激响应h[n]与输入信号x[n]之卷积:y[n]=∑[x[k]*h[n-k]]。
三、线性时不变系统1.线性时不变系统输入输出关系的微分方程表示:a0*y(t) + a1*(dy(t)/dt) + a2*(d^2y(t)/dt^2) + ... = b0*x(t) + b1*(dx(t)/dt) + b2*(d^2x(t)/dt^2) + ...2.线性时不变系统频域表达式:Y(ω)=H(ω)*X(ω),其中H(ω)为系统的频率响应函数。
四、傅里叶变换与频谱分析1.连续时间傅里叶变换:X(ω) = ∫[x(t)*e^(-jωt)]dt。
2.连续时间频谱密度:S(ω)=,X(ω),^23.离散时间傅里叶变换:X(e^(jω))=∑[x[n]*e^(-jωn)],其中n为离散取值。
4.离散时间频谱密度:S(e^(jω))=,X(e^(jω)),^2以上仅是信号与系统中的部分公式,覆盖了信号表示与描述、系统分析与描述以及信号的频谱分析等方面的内容。

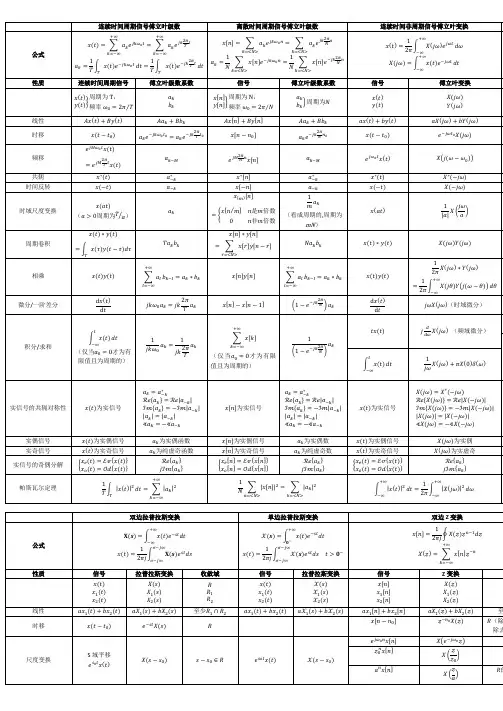
信号与系统主要公式和内容摘要一.单位冲激信号()t δ的基本特性: 1. √()()()()()0t x dt t t t x dt t t t x =+=-⎰⎰∞∞-∞∞-δδ2.()()()⎩⎨⎧><=⎰0ab ab dt t t b aϕδϕ3.()()t aat δδ1=4. √ ()()()()000t t t x t t t x -=-δδ5. ()()t t δδ=- 偶函数6.()()t dtt du δ= ()()t u d t =⎰∞-ττδ 7. ()()()t x t t x =*δ ()()()00t t x t t t x -=-*δ 8. ()()()2121t t t t t t t --=-*-δδδ 9. ()()()t x t t x '='*δ ()()()ττd x t u t x t⎰∞-=*10. 若:()()()t x t x t y 21*=则:()()()()()t x t x t x t x t y 2121'*=*'=' ()()()()()()()()t x t x t x t x t y 1212111---*=*=()()()212211t t t y t t x t t x --=-*- 二.单位脉冲序列[]n δ的基本特性: 1. [][]∑+∞=-=k k n n u δ [][]∑-∞==nk k n u δ √[][][]1--=n u n u n δ2. √[][][][]000n n n x n n n x -=-δδ√[][][]n x n n x =*δ √[][][]00n n x n n n x -=-*δ 3. [][][]k n k x n x k -=∑∞-∞=δ特殊:()()()()t r t tu t u t u ==* [][]()[]n u n n u n u 1+=* 1欧拉公式:()()()[]()[]⎪⎪⎪⎩⎪⎪⎪⎨⎧-=+=+=--t j t j t j t j t j e e j t Sin e e t Cos t jSin t Cos e ααααααααα2121三.线性时不变系统(LTI 系统)的主要特性 1. 线性:(1) 无初值:()()()()t y a t y a t x a t x a 22112211+→+ [][][][]n y a n y a n x a n x a 22112211+→+ (2) 含初值:若:()()()t y x t f 1110→⎥⎦⎤⎢⎣⎡ ()()()t y x t f 2220→⎥⎦⎤⎢⎣⎡ 则:()()()()()()t y t y x t f x t f 21221100βαβα+→⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡[][][][][][]k y k y x k f x k f 21221100βαβα+→⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡ 2. 时不变性:()()00t t y t t x -→- [][]00n n y n n x -→- 3. 微(差)分性:()()dtt dy dt t dx → [][]k n y k n x -→- 4. 积分(累加)特性:()()⎰⎰→ttd y d x 0ττττ [][]∑∑==→Nk Nk k y k x 05. 因果性:若:()0=t h ,当0<t 时 √若:[]0=n h ,当0<n 时 6. 稳定性:()∞<⎰∞∞-ττd h √[]∑∞-∞=∞<k k h27. 卷积特性: ()()()()()()()ττττττd t x h d t h x t h t x t y f ⎰⎰∞∞-∞∞--=-=*=[][][][][][][]k n x k h k n h k x n h n x n y k k f -=-=*=∑∑∞-∞=∞-∞=有:()()()ωωωj H j X j Y f =()()()S H S X S Y f =()()()Z H Z X Z Y f =四.信号的基本运算: 1. 相加:()()()t x t x t y 21+= [][][]n x n x n y 21+=2. 相乘:()()()t x t x t y 21= [][][]n x n x n y 21=3. 幅度加权:()()t x t y α= [][]n x n y α=4. 反折:()()t x t y -= [][]n x n y -=5. 时移:()()0t t x t y -= [][]0n n x n y -=00>t (或00>n )为右移,00<t (或00<n )为左移 6. 尺度变换:(1) 连续时间信号的尺度变换:()()at x t y =1>a 时,表示()t x 在时间轴上被压缩a 倍 1<a 时,表示()t x 在时间轴上被扩展a 倍(2) 离散时间信号的内插与抽取: 内插:[]⎥⎦⎤⎢⎣⎡→L k f k f , L 为正整数[]0f 不动,在序列2点之间插入1-L 个零点 3抽取:[][]Mk f k f →, M 为正整数[]0f 不动,在原序列中每隔1-M 点抽取一点 7. 微分(差分): ()()dtt dx t y =[][][]1--=n x n x n y8. 积分(累加): ()()ττd x t y t⎰∞-= [][]∑-∞==nk k x n y9. 卷积()()()()()()()ττττττd t x x d t x x t x t x t y -=-=*=⎰⎰∞∞-∞∞-122121[][][][][][][]k n x k x k n x k x n x n x n y k k -=-=*=∑∑∞-∞=∞-∞=122121五.几何级数的求值公式:1. ⎪⎪⎩⎪⎪⎨⎧=+≠--=+=∑1111121220a n a a a a n n n n2. ⎪⎪⎩⎪⎪⎨⎧=+-≠--=+=∑11111212121a n n a a a a a n n n n n n210n n ≤<3.aa n n -=∑+∞=110 1<a 4. a a a n n-=∑+∞=11 1<a 5. a a a n n n n-=∑+∞=1111<a六.傅里叶变换、拉普拉斯变换、Z 变换 1.LTI 系统对虚指数信号的响应:→t j e ω()()t j e j H t y ωω=→()()()tjn n n n tjn n e jn H C t y eC t f 000ωωω∑∑∞-∞=∞-∞==→=42.傅里叶级数公式: ()∑∞-∞==n tjn n eC t x0ω 其中:()dt e t x T C tjn Tn 01ω-⎰= 3. 傅里叶变换公式(系统稳定):(1)非周期信号:()()ωωπωd ej X t x tj ⎰∞+∞-=21()()dt e t x j X t j ωω-∞+∞-⎰=条件:()⎰∞+∞-∞<dt t x 或()⎰∞+∞-∞<dt t x 2(2)周期信号:()∑∞-∞==k t jk k e a t xω()()∑∞-∞=-=k k k a j X 02ωωδπω 002T πω=()dt e t x T a tjk Tk 01ω-⎰=4. 拉普拉斯变换公式: ()()dt et x S XtS -∞-⎰=0 ()()dS e S X j t x t S j j ⎰∞+∞-=σσπ215. Z 变换公式: ()[]n n Z n x Z X -∞=∑=[]()dZ Z Z X j n x n C121-⎰=π6. 典型信号的三种变换公式:(1)√()1−→←FTt δ√()1−→←LT t δ √()()n LTn S t −→←δROC:整个S 平面√[]1−→←Zn δ ROC:整个Z 平面 (2) √()00t j FTe t t ωδ-−→←-√()00t S LT e t t -−→←-δ ROC:整个S 平面√[]00nZ Z n n -−→←-δROC:整个Z 平面(可能去除0=Z )(3) ()()ωπδω+−→←j t u FT15()St u LT1−→← ROC:{}0>S R e √ []111--−→←Zn u ZROC: 1>Z (4) ()ωj a t u eFTat+−→←-1{}0>a R e√()a S t u eLTat+−→←-1ROC: {}a S R e -> []111--−→←aZn u a Z nROC: a Z > (5) ()()21ωj a t u teFTat+−→←- {}0>a R e()()21a S t u teLTat+−→←- ROC: {}a S R e ->()[]()21111--−→←+aZ k u a k Zk ROC: a Z >(6)()∑∑+∞-∞=+∞-∞=-−→←k kFTk tjk kk a ea 020ωωδπω(7) ()020ωωπδω-−→←FT tj e()020ωωπδω+−→←-FTt j e(8) ()ωπδ21−→←FT(9) √()()[]000ωωδωωδπω++-−→←FTt Cos()220)(ωω+−→←S S t u t Cos LTROC: {}0>S R e(10) ()()[]000ωωδωωδπω--+−→←j t Sin FT()2020)(ωωω+−→←S t u t Sin LTROC: {}0>S R e (11) ()∑∑∞-∞=∞-∞=⎪⎭⎫ ⎝⎛-−→←-k FTn T kT nT t πωδπδ226(12) −→←FTT ASa T )(211ω(13) −→←FTtt ASin πλ√()()21ωSa t p FT−→← ()()()2211ωSa t p t p FT−→←* 七.傅里叶变换、拉普拉斯变换、Z 变换的主要性质设:()S X :ROC {}0Re σ>S ()Z X :ROC Rf Z > 1. 线性:()()()()ωωj bY j aX t by t ax FT+−→←+()()()()S bY S aX t by t ax lT +−→←+ ROC :公共收敛域 [][]()()Z bY Z aX n by n ax ZT +−→←+ ROC :公共收敛域2. 时移: √()()ωωj X e t t xt j FT00-−→←-√()()S X e t t xt S LT 00-−→←- 要求:右移,即00>tROC :未变因果序列:√[][]()Z X Z n n u n n xn ZT00-−→←-- 要求:右移,即00>nROC :未变非因果序列:√[][]()[]111-+−→←--x Z X Z n u n x ZT√ [][]()[][]21212-+-+−→←---x x Z Z X Zn u n x ZT73. 频移:()()[]00ωωω-−→←j X t x e FTt j()()00S S X t x e LT tS -−→← ROC: {}00Re σ>-S S []⎪⎭⎫ ⎝⎛−→←a Z X n x a ZT n ROC: Rf a Z >()[]()Z X n x ZTn -−→←-1 ROC:Rf Z >-4.反折:()()ωj X t x FT -−→←-()()S X t x LT -−→←- ROC: {}0Re σ>-S5.尺度变换:()⎪⎭⎫ ⎝⎛−→←a j X a at x FT ω1 √()⎪⎭⎫ ⎝⎛−→←a S X a at x LT1 ROC :0Re σ>⎭⎬⎫⎩⎨⎧a S6.卷积:√()()()()ωωj Y j X t y t x FT−→←*()()()()S Y S X t y t x LT−→←* ROC :公共收敛域 [][]()()Z Y Z X n y n x ZT −→←* ROC :公共收敛域7.时域微分:()()ωωj X j t x dtd FT−→←:未修正 不含初值:√()()S SX t x dt d LT −→← √()()S X S t x dtd n LTn n −→← 含初值: √()()()--−→←0x S SX t x dt d LT √ ()()()()--'--−→←00222x Sx S X S t x dtd LT 8.频域微分: 8()()ωωj X d djt tx FT−→← ()()S X dSd t tx LT-−→← ROC :未变[]()dZZ dX Z n nx ZT-−→← ROC :未变9.积分(累加):()()()()ωδπωωττ01X j X j d x FTt +−→←⎰∞- ()()S X Sd x LTt1−→←⎰-ττ ROC :{})0,max(Re 0σ>S []()Z X Zn x ZT kn 111-=-−→←∑ ROC :),1max(Rf Z > 10.调制(频域卷积):()()()(){}ωωπj Y j X t y t x FT *−→←2111.对偶:若:()()ωj F t g FT−→← 则:()()ωπ-−→←g jt F FT2 八.系统函数: 1.连续系统:()()∑∑===Nk M k kk k k k k dt t x d b dt t y d a 00√()()()()()∑∑====Nk kk kMk k j a j b j X j Y j H 00ωωωωω√()()()∑∑====Nk kk Mk kk f Sa Sb S X S Y S H 0()()ωωπωd ej H t h tj ⎰∞∞-=21()()dS e S H j t h t S j j ⎰∞+∞-=σσπ212. 离散系统:[][]∑∑==-=-Mk kN k kk n x b k n y a 0√()()()k Nk k Mk Kk f Z a Zb Z X Z Y Z H -==-∑∑==[]()dZ Z Z H j n h n C121-⎰=π3. 系统的因果性:(1)连续系统:S 域 一个具有有理系统函数H(S)的LTI 系统,其因果性等价于H(S)的ROC 位于S 平面上最右边极 点的右半平面。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义: 一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
信号与系统公式总结在信号与系统的学习过程中,公式总结是非常重要的,它可以帮助我们更好地理解和掌握知识。
下面将对信号与系统中常见的公式进行总结,希望能够对大家的学习有所帮助。
一、基本概念公式总结。
1. 信号的分类:连续时间信号,x(t)。
离散时间信号,x[n]2. 基本信号:单位冲激函数,δ(t)或δ[n]阶跃函数,u(t)或u[n]3. 基本性质:奇偶性,x(t) = x(-t),x[n] = x[-n]周期性,x(t) = x(t+T),x[n] = x[n+N]二、时域分析公式总结。
1. 基本运算:时移性质,x(t-t0)或x[n-n0]反褶性质,x(-t)或x[-n]放大缩小,Ax(t)或Ax[n]2. 基本运算公式:加法,x1(t) + x2(t)或x1[n] + x2[n]乘法,x1(t)x2(t)或x1[n]x2[n]三、频域分析公式总结。
1. 傅里叶变换:连续时间信号,X(ω) = ∫x(t)e^(-jωt)dt。
离散时间信号,X(e^jω) = Σx[n]e^(-jωn)。
2. 傅里叶变换性质:线性性质,aX1(ω) + bX2(ω)。
时移性质,x(t-t0)对应X(ω)e^(-jωt0)。
频移性质,x(t)e^(jω0t)对应X(ω-ω0)。
四、系统分析公式总结。
1. 系统性质:线性性,y(t) = ax1(t) + bx2(t)。
时不变性,y(t) = x(t-t0)对应h(t-t0)。
2. 系统时域分析:离散卷积,y[n] = Σx[k]h[n-k]连续卷积,y(t) = ∫x(τ)h(t-τ)dτ。
3. 系统频域分析:系统函数,H(ω) = Y(ω)/X(ω)。
五、采样定理公式总结。
1. 采样定理:连续信号采样,x(t)对应x[n],x[n] = x(nT)。
重建滤波器,h(t) = Tsinc(πt/T)。
六、傅里叶级数公式总结。
1. 傅里叶级数:周期信号的傅里叶级数展开。
信号与系统概念,公式集:一:概念1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
二:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 三:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
a 2 +b 2 ⎰ i i11i TT信号与系统概念,公式集:第一章:概论1. 信号:信号是消息的表现形式。
(消息是信号的具体内容)2. 系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1. 复数的两种表示方法:设 C 为复数,a 、b 为实数。
常数形式的复数 C=a+jb a 为实部,b 为虚部;或 C=|C|e j φ,其中,| C |= 为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2. 欧拉公式: e jwt= c os wt + j sin wt (前加-,后变减)第三章:正交函数集及信号在其上的分解1. 正交函数集的定义:设函数集合 F= { f 1 (t ), f 2 (t ), f n (t )}如果满足: T 2f i (t ) f T 1Tj (t )dt = 0i ≠ j 2f 2 (t )dt = K T 1i = 1,2 n则称集合 F 为正交函数集 如果 K i = 1i = 1,2, n ,则称 F 为标准正交函数集。
如果 F 中的函数为复数函数 2 f (t ) ⋅ f *(t )dt = 0i ≠ j ⎰T ij条件变为: 2f (t ) ⋅ f *(t )dt = Ki = 1,2 n⎰T i i i其中 f *(t ) 为f i (t ) 的复共轭。
2. 正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数⎰n1 11 1 11 TTTT在这个坐标系统中的坐标。
3. 正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如 果 在 正 交 函 数 集 g 1 (t ), g 2 (t ), g 3 (t ), g n (t ) 之 外 , 不 存 在 函 数 x ( t )0 < t 2x 2(t )dt < ∞ ,满足等式: t 2x (t )g (t )dt = 0 ,则此函数集称为完备正交函数集。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部; 或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n = 如果满足:ni K dt t f j i dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f j i dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
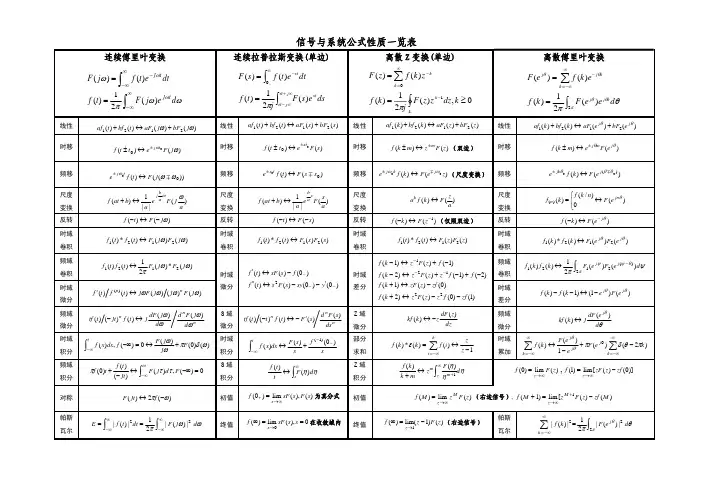
信号与系统公式性质1连续傅里叶变换⎰⎰∞∞-∞∞--==ωωπωωωd e j F t f dtet f j F t j tj )(21)()()(2连续拉普拉斯变换(单边) ⎰⎰∞+∞-∞-==-j j st stds e s F j t f dte tf s F σσπ)(21)()()(03离散Z 变换(单边) ⎰∑≥==-∞=-Lk k kk dz z z F j k f z k f z F 0,)(21)()()(10π4离散傅里叶变换⎰∑==∞-∞=-πθθθθθπ2)(21)()()(d e eF k f e k f e F k j j k kj j 线性 )()()()(2121ωωj bF j aF t bf t af +↔+线性 )()()()(2121s bF s aF t bf t af +↔+线性 )()()()(2121z bF z aF k bf k af +↔+线性 )()()()(2121θθj j e bF e aF k bf k af +↔+时移)()(00ωωj F e t t f t j ±↔± 时移)()(00s F e t t f st ±↔± 时移)()(z F z m k f m ±↔±(双边) 时移)()(θθj m j e F e m k f ±↔± 频移 ))(()(00ωωω j F t f e t j ↔±频移 )()(00s s F t f e t s ↔±频移 )()(00z e F k f e j k j ωω ↔±(尺度变换)频移 )()()(00θθθ j jk e F k f e ↔±尺度 变换 )(||1)(aj F e a b at f a bj ωω↔+尺度 变换 )(||1)(asF e a b at f s a b↔+尺度 变换 )()(azF k f a k ↔尺度 变换 )(0)/()()(θjn n e F n k f k f ↔⎩⎨⎧=反转 )()(ωj F t f -↔- 反转 )()(s F t f -↔- 反转 )()(1-↔-z F k f (仅限双边) 反转 )()(θj e F k f -↔-时域 卷积 )()()(*)(2121ωωj F j F t f t f ↔时域 卷积)()()(*)(2121s F s F t f t f ↔时域 卷积)()()(*)(2121z F z F t f t f ↔时域 卷积 )()()(*)(2121θθj j e F e F k f k f ↔ 频域 卷积 )(*)(21)()(2121ωωπj F j F t f t f ↔时域 微分)0()0()()()0()()(2---'--↔''-↔'y sy s F s t f f s sF t f时域 差分)1()0()()2()0()()1()2()1()()2()1()()1(22121zf f z z F z k f zf z zF k f f f zz F z k f f z F z k f --↔+-↔+-+-+↔--+↔----频域卷积 ψπθψπψd e F eF k f k f j j )()(21)()()(22121-⎰↔时域 微分 )()()()()()(ωωωωj F j j F j t f t f n n ↔'时域 差分 )()1()1()(θθj j e F e k f k f -↔--频域 微分 nn nd j F d d j dF jt f jt t tf ωωωω)()()()()(↔-S 域 微分 nn nds s F d s F t f t t tf )()()()()('-↔-Z 域 微分 dzz dF zk kf )()(-↔频域 微分 θθd e dF jk kf j )()(↔时域 积分 )()0()(0)(,)(ωδπωωF j j F f dx x f t+↔=-∞⎰∞-时域 积分 sf s s F dx x f t)0()()()1(--∞-+↔⎰部分 求和 1)()(*)(-↔=∑-∞=z zi f k k f ki ε 时域 累加∑∑∞-∞=∞-∞=-+-↔k j j j k k e F e e F k f )2()(1)()(0πθδπθθ频域 积分 0)(,)()()()0(=-∞↔-+⎰∞-F d j F jt t f t f ωττπS 域 积分 ⎰∞↔s d F tt f ηη)()(Z 域 积分 ηηηd F z mk k f z m m⎰∞+↔+1)()()(lim )0(z F f z →∞=,)]0()([lim )1(zf z zF f z -=→∞对称 )(2)(ωπ-↔f jt F初值)(),(lim )0(s F s sF f s →∞+=为真分式初值)(lim )(z F z M f M z ∞→=(右边信号),)()([lim )1(1M zf z F z M f M z -=++∞→帕斯 瓦尔⎰⎰∞∞-∞∞-==ωωπd j F dt t f E 22|)(|21|)(| 终值0),(lim )(0==∞→s s sF f s 在收敛域内终值)()1(lim )(1z F z f z -=∞→(右边信号)帕斯 瓦尔⎰∑∞-∞==πθθπ222|)(|21|)(|d e F k f j k常用连续傅里叶变换、拉普拉斯变换、Z 变换对一览表连续傅里叶变换对⎰∞∞--=dt et f j F tj ωω)()(拉普拉斯变换对(单边)⎰∞--=0)()(dt e t f s F stZ 变换对(单边) ∑∞=-=0)()(k k z k f z F函数 )(t f傅里叶变换)(ωj F 函数 )(t f 象函数)(s F函数0),(≥k k f象函数函数0),(≥k k f象函数1)(t δ )(21ωπδ )(t δ1)(k δ10),(≥-m m k δmz -)()()(t t n δδ'nj j )(ωω)(t δ's11-z z 0),(≥-m m k εm z z z-⋅-1)(t ε)(1ωπδω+j )(t εs1)(k ε1-z z )(2k k ε32)1(-+z z z )(t t ε21)(ωωδπ-'j )()(t t t t nεε12!1+n s n s )(k k ε2)1(-z z )()1(k a k k ε+ 22)(a z z - 0,)()(>--αεεααt te t e t t2)(11ωαωαj j ++)()(t te t e t t εεαα--2)(11αα++s s)(k a k ε az z - )(1k ka k ε-2)(a z z - )sin()cos(00t t ωω)]()([)]()([0000ωωδωωδπωωδωωδπ--+-++j)()cos(t t εβ22β+s s)(k e k εααe z z -)(k ka k ε2)(a z az -t 1)sgn(ωπj -)()sin(t t εβ 22ββ+s)(k ekj εββj e z z -)(2k a k kε322)(a z z a az -+||t22ω-)()cosh(t t εβ22β-s s )(2)(k aa a kk ε-- 22a z z - )(2)(k aa a kk ε-+ 222a z z - tj e0ω±)(20ωωπδ)()sinh(t t εβ22ββ-s )(2)1(k k k ε- 3)1(-z z)(2)1(k kk ε+ 32)1(-z z )()cos(t t etεβα-22)(βαωαω+++j j)()cos(t t etεβα-22)(βαα+++s s )(k ba b a kk ε-- ))((b z a z z--)(11k ba b a k k ε--++ ))((2b z a z z -- )()sin(t t e t εβα-22)(βαωβ++j)()sin(t t etεβα-22)(βαβ++s)()cos(k k εβ1cos 2)cos (2+--ββz z z z)()sin(k k εβ1cos 2sin 2+-ββz z z),(||>-αεαt et222ωαα+)()(10t b t b ε+210ss b b +)()cos(k k εθβ+1cos 2)cos(cos 22+---βθβθz z z z)()sin(k k εθβ+1cos 2)sin(sin 22+--+βθβθz z z znt t)()(2)(2)(ωδπωδπn n j j ')()(10t e b b b t εααα---)(01α++s s b s b)()cos(k k a k εβ22cos 2)cos (a az z a z z +--ββ)()sin(k k a k εβ22cos 2sin a az z az +-ββ)sgn(tωj 2)()]sin([13t t t εβββ-)(1222β+s s)()cosh(k k a k εβ22cosh 2)cosh (aaz z a z z +--ββ)()sinh(k k a k εβ22cosh 2sinh a az z az +-ββ)0(,0,0,>⎪⎩⎪⎨⎧><--αααt e t e tt 222ωαω+-j)()sin()]1[213t t t εβββ-222)(1β+s0),(>k k ka kε⎪⎭⎫ ⎝⎛-a z z ln )(!k k a kε za e⎪⎪⎩⎪⎪⎨⎧><=2||,02||),cos()(τττπt t t t f 22)2()2()2cos(2ωτπωτπτ-⋅)()sin(21t t t εββ222)(β+s s)(!)(ln k k a kε za1)!2(1k z1cosh∑∞-∞=Ωn tjn n e FTn F n n πωδπ2,)(2=ΩΩ-∑∞-∞= )()]cos()[sin(21t t t t εββββ+ 2222)(β+s s)(11k k ε+ ⎪⎭⎫ ⎝⎛-1ln z z z )(121k k ε+ 11ln21-+z z z ∑∞-∞=-=n T nT t t )()(δδTn n πωδωδ2)()(=ΩΩ-Ω=∑∞-∞=Ω )()cos(t t t εβ22222)(ββ+-s s)(])([1010t e b b e b b tt εαββαβαβα----+--))((01βα+++s s b s b⎪⎪⎩⎪⎪⎨⎧><=2||,02||,1)(τττt t t g⎪⎭⎫⎝⎛=⎪⎭⎫ ⎝⎛2sin 22ωτωωττSateb t b b αα-+-])[(110201)(α++s b s b)(]))(())(())(([221022102210t e b b b eb b b e b b b ttt εγβγαγγβγβαββαγαβααγβα-----+-+--+-+--+-))()((0122γβα+++++s s s b s b s btWt Wt Sa Wππ)sin()(= ⎪⎪⎩⎪⎪⎨⎧><=2||,02||,1)(W W j F ωωω)()sin(t t Ae t εθβα+-,其中ββαθ)(10j b b Ae j --=2201)(βα+++s b s b)(])()2()([2210221022210t eb b b te b b b e b b b ttt εαβαβαβαβααβαββααβ-----+--⋅-+-+-+-)()(20122βα++++s s b s b s b⎪⎪⎩⎪⎪⎨⎧><-=∆2||,02||,||21)(τττt t t t f ⎪⎭⎫⎝⎛422ωττSa )(])(21)2([22210212t e t b b b teb b eb t ttεαααααα---+-+-+3122)(α+++s b s b s b)()]sin([222210t t A e b b b t εθββγγγγ++++--其中)()(1220βγβββθj jb b b Ae j ++-=))((220122βγ++++s s b s b s b⎪⎪⎩⎪⎪⎨⎧><+=2||,02||),2(1)(ττττt t t t f⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛--212ωτωωτSa ejj ⎥⎦⎤⎢⎣⎡-⨯⎥⎦⎤⎢⎣⎡+-↔⎪⎪⎪⎩⎪⎪⎪⎨⎧><<--<=4)(sin 4)(sin )(82||,02||2),||21(2||,1)(1112111ττωττωττωττττττττt t t t t f)()]sin()([222210t t Ae e b b b t t εθββγαγγαγ+++-+---其中)()()(2210βαγββαβαθj j b j b b Ae j +--+--=)]))[((220122βαγ+++++s s b s b s b双边拉普拉斯变换与双边Z 变换对一览表双边拉普拉斯变换对 ⎰∞∞--=dt e t f s F st)()(双边Z 变换对∑∞-∞=-=k kzk f z F )()(函数 象函数)(s F 和收敛域 函数 象函数)(z F 和收敛域 )(t δ 1,整个S 平面)(k δ1,整个Z 平面)()(t n δns ,有限S 平面)(k nδ∆0||,)1(>-z z z nn)(t ε0}Re{,1>s s)(k ε1||,1>-z z z)(t t ε0}Re{,12>s s )()1(k k ε+ 1||,)1(22>-z z z)()!1(1t n t n ε-- 0}Re{,1>s s n)()!1(!)!1(k n k n k ε--+1||,)1(>-z z z nn)(t --ε 0}Re{,1<s s)1(---k ε1||,1<-z z z)(t t --ε 0}Re{,12<s s )1()1(--+-k k ε 1||,)1(22<-z z z)()!1(1t n t n ----ε 0}Re{,1<s sn )1()!1(!)!1(----+-k n k n k ε 1||,)1(<-z z z nn)(t e at ε-}Re{}Re{,1a s as ->+ )(k a k ε||||,a z az z>- )(t teatε- }Re{}Re{,)(12a s a s ->+)()1(k a n nε+||||,)(22a z a z z >-)()!1(1t e n t atn ε--- }Re{}Re{,)(1a s a s n->+ )()!1(!)!1(k a n k n k nε--+||||,)(a z a z z nn>-)(t e at ---ε }Re{}Re{,1a s as -<+ )1(---k a k ε||||,a z az z<- )()!1(1t e n t at n -----ε }Re{}Re{,)(1a s a s n-<+)1()!1(!)!1(----+-k a n k n k n ε ||||,)(a z a z z nn<- )()cos(t t εβ 0}Re{,22>+s s sβ)()cos(k k εβ 1cos 2cos 22+--ββz z z z)()sin(t t εβ 0}Re{,22>+s s ββ)()sin(k k εβ 1cos 2sin 2+-ββz z z)()cos(t t etεβα-}Re{}Re{,)(22a s s s ->+++βαα)()cos(k k a kεβ 1cos 2cos 22+--ββza z za z)()sin(t t e t εβα- }Re{}Re{,)(22a s s ->++βαβ)()sin(k k a k εβ1cos 2sin 2+-ββza z za0}Re{,||>-a et α}Re{}Re{}Re{,222a s a as a->>-- 1||,||<a a k |1|||||,)1)(()1(2a z a az a z z a <<---}Re{),sgn(||>-a t e t α}Re{}Re{}Re{,222a s a a s s->>-1||sgn,||<a a k|1|||||,)1)(()(2az a az a z z z a <<---卷积积分一览表⎰∞∞--=τττd t f f t f t f )()()(*)(121)(1t f)(2t f)(*)(21t f t f)(1t f)(2t f)(*)(21t f t f)(t f )(t δ')(t f ')(t f)(t δ)(t f)(t f)(t ελλd f t⎰∞-)()(t ε )(t ε)(t t ε)(t e t εα-)(t ε)()1(1t e t εαα--)(t ε)(t t ε)(212t t ε )(1t e t εα-)(2t e t εα-2112),()(121ααεαααα≠----t e e t t )(t e t εα- )(t e t εα-)(t te t εα- )(t t ε )(t e t εα- )(1122t e t t εαααα⎪⎪⎭⎫ ⎝⎛+--)(t te t εα-)(t e t εα-)(212t e t tεα-卷积和一览表∑∞-∞=-=i i k f i ft f t f )()()(*)(121 )(1t f)(2t f)(*)(21t f t f)(1t f)(2t f)(*)(21t f t f)(k f)(k δ)(k f)(k f)(k ε ∑-∞=ki i f )()(k ε )(k ε )()1(k k ε+ )(k k ε)(k ε)()1(21k k k ε+)(k a k ε)(k ε0),(111≠--+a k aa k ε )(1k a k ε )(2k a kε21211211),(a a k a a a a k k ≠--++ε )(k a k ε )(k a k ε)()1(k a k k ε+)(k k ε)(k a k ε)()1()1()(12k a a a k a k k εε--+- )(k k ε )(k k ε)()1()1(61k k k k ε-+)()cos(1k k a k εθβ+)(k a k ε⎥⎦⎤⎢⎣⎡-=-+---++++2112122211211cos sin arctan )(cos )cos(])1(cos[a a a k a a a a a k a k k ββϕεβϕθϕθβ关于)(t δ、)(k δ函数公式一览表)()0()()(t f t t f δδ=)()()()(000t t t f t t t f -=-δδ)()()()(t t t t δδδδ'-=-'=- )()0()()0()()(t f t f t t f δδδ'-'=')0()()(f dt t t f =⎰∞∞-δ)()()(00t f dt t t t f =-⎰∞∞-δ)(|)(|1)([1i ni i t t t f t f -'=∑=δδ)0()1()()()()(n n n f dt t t f -=⎰∞∞-δ)(||1)(t a at δδ=⎰⎰∞-∞∞-==tt d dt t )()(1)(εττδδ)()(0)(t d dt t tδττδδ='='⎰⎰∞-∞∞-)()()()()()(00000t t t f t t t f t t t f -'--'=-'δδδ)(1||1)()()(t a a at n nn δδ⋅=)()()()(k k k ak δδδδ=-=∑∞-∞===k f k k f k f k k f )0()()()()0()()(δδδ)()()(00t f dt t t t f '-=-'⎰∞∞-δ。