【重庆邮电大学】信号与系统常用公式
- 格式:pdf
- 大小:336.60 KB
- 文档页数:14
信号与系统重点概念公式总结Last updated on the afternoon of January 3, 2021信号与系统重点概念及公式总结:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jba 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwt sin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n =如果满足:n i K dt t f j i dt t f t f i T T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f j i dt t f t f i T T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴;在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
信号与系统概念,公式集:第一章:概论1、信号:信号就是消息的表现形式。
(消息就是信号的具体内容)2、系统:由若干相互作用与相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1、复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部; 或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a,φ为复数的辐角。
(复平面)2、欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1、正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n = 如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2、正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就就是该函数在这个坐标系统中的坐标。
3、正交函数集完备的概念与物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集就是完备的,否则称该正交集就是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x(t)()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f Fn =如果满足:ni K dt t f j i dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
常用公式第一章判断周期信号方法两个周期信号x(t),y(t)的周期分别为T1和T2,若其周期之比T1/T2为有理数,则其和信号x(t)+y(t)仍然是周期信号,其周期为T1和T2的最小公倍数。
2/2/2/(2/),/N N M M N πβπβπβπβπβ==仅当为整数时正弦序列才具有周期当为有理数时 正弦序列仍具有周期性, 其周期为取使为整数的最小整数当2为无理数时 正弦序列不具有周期性,1、连续正弦信号一定是周期信号,而正弦序列不一定是周期序列。
2、两连续周期信号之和不一定是周期信号,而两周期序列之和一定是周期序列。
信号的能量 def2()E f t dt +∞-∞=⎰信号的平均功率 def2/2/21lim ()T T T P f t dt T +-→∞=⎰ 冲激函数的特性'''()()(0)()(0)()f t t f t f t δδδ=- ()()(0)()f t t f t δδ=()()()()f t t a f a t a δδ-=- ()()(0),f t t dt f δ∞-∞=⎰()()()f t t a dt f a δ∞-∞-=⎰()()11()()n n nat t a a δδ=001()()t at t t a aδδ-=- 000()()()()f k k k f k k k δδ-=-()()()()(1)(0)n n n t f t dt f δ∞∞=-⎰- ''()()(0)t f t dt f δ∞∞=-⎰-动态系统是线性系统的条件可分解性 {}{}{}{}()()()0,()(0),0f x y y y T f T x ∙=∙+∙=∙+⎡⎤⎡⎤⎣⎦⎣⎦ 零状态线性 {}{}{}{}{}{}12120,()()0,()0,()T af t bf t aT f bT f +=∙+∙⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦ 零输入线性 {}{}{}{}{}{}1212(0)(0),0(0),0(0),0T ax bx aT x bT x +=+⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦判断系统时不变、因果、稳定的方法。

信号与系统中的常见公式
1.傅里叶变换的公式:
记X(ω)为一个时域信号x(t)的傅里叶变换,那么傅里叶变换的公式为:
X(ω) = ∫x(t)e^{-jωt}dt
其中,ω表示变换后的信号的频率变量,j=√-1
2.回路分析公式:
对电路进行回路分析时,基本公式可以表达为:
V=IR
即电压V等于电流I乘以电阻R。
3.滤波器的公式:
滤波器在信号处理中起着重要作用,其核心公式是:
H(s)=A(s)B(s)
其中,H(s)表示滤波器的传输函数,A(s)为滤波器的输入函数,B(s)为滤波器的输出函数。
4.模拟到数字的公式:
模拟到数字转换是信号处理中的重要组成部分,将模拟信号转换为数字信号需要用到的公式为:
y[n] = ∫ x(t)p(t-nT)dt
其中,x(t)是原始模拟信号,y[n]是转换得到的数字信号,T为采样周期,p(t)为采样函数。
5.传输函数的公式:
信号系统中的传输函数是衡量系统性能的重要指标,传输函数的表达式为:
H(s)=X(s)Y(s)
其中。
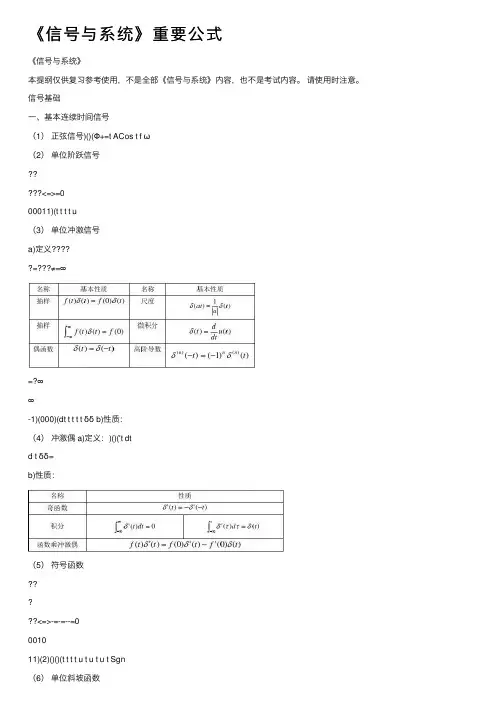
《信号与系统》重要公式《信号与系统》本提纲仅供复习参考使⽤,不是全部《信号与系统》内容,也不是考试内容。
请使⽤时注意。
信号基础⼀、基本连续时间信号(1)正弦信号)()(Φ+=t ACos t f ω(2)单位阶跃信号<=>=000011)(t t t t u(3)单位冲激信号a)定义=≠=∞=?∞∞-1)(000)(dt t t t t δδ b)性质:(4)冲激偶 a)定义:)()('t dtd t δδ=b)性质:(5)符号函数<=>-=-=--=0001011)(2)()()(t t t t u t u t u t Sgn(6)单位斜坡函数≥<===∞-000)()()(t t td u t tu t f t ττ(7)复指数信号ωσωσ?ω?ωσωσj s j s s s t jSin t Cos Ae Ae t f t AjSin t ACos Ae t f Ae t f A t f Ae t f t st tj tst +====+==+====?=0)()()()()()((8)抽样信号)(int )(t Sinc t S t Sa ==⼀、信号的时域分解奇偶分解:)()()(t f t f t f o e += )]()([21)()]()([21)(t f t f t f t ft f t f o e --=-+=三、信号的时域变换四、系统的定义和分类(1)定义:能够完成某种运算功能的集合(2)五、LTI 线性时不变系统的性质(1)信号的函数和波形互换a) 由函数画波形(列举关键点、微积分关系、分段函数) b) 由波形求函数(分段函数⽤u(t)描述)(2)含有奇异函数的运算a) 注意抽样特性?dt t f t t f t )()()()(δδ和的区别 b) 注意积分的区间(3)信号的变换(通常先反折再时移最后展缩较简易)(4)系统类型的判定(根据定义判定,线性性可以分解讨论)连续系统时域分析⼀、系统的数学模型1.系统⽤常系数⾮齐次微分⽅程描述f b f b f b f b y a y a y a y a n n n n n n n n 0)1(1)1(1)(0)1(1)1(1)(++++=++++----ΛΛ2.全响应的求解的基本步骤:全响应y(t)=y x (t)+y f (t)⼆、全响应的三、冲激和阶跃响应?∞-==td h t g t g dt d t h ττ)()()()(四、卷积积分1.定义?∞∞--=*=τττd t f f t f t f ty )()()()()(21212.性质(1)微分⽅程的求解(2)卷积的运算(a )图解法(b )解析法(使⽤公式和性质)连续信号的频域分析⼀、⾮周期信号的频域分析(1)傅⽴叶变换?∞∞-∞∞--==ωωπωωωd e j F t f dte tf j F t j t j )(21)()()((2)性质(3)常⽤变换对四、抽样定理(1)抽样信号)()()(t t f t f T s δ=(2)时域抽样定理抽样信号能恢复原始信号的条件: a )原始信号为限带信号 b )抽样间隔mm s ms f T ωπωω=≤≥212(1)频谱分析(2)信号的频域分析或频域简化(3)抽样连续系统的频域分析⼀、频域系统函数(1)定义)()()(ωωωj F j Y j H f =(2)含义)]([)()()()(t h F j H t h t f t y f =*=ω(3)H(j ω)的求解 a ))]([)(t h F j H =ωb )频域电路模型求解(4)频率特性)(|)(|)(ω?ωωj e j H j H =⼆、⾮周期信号激励下系统零状态响应的求解步骤:(1))()(ωj F t f ? (2)求)(ωj H(3))()()(ωωωj F j H j Y f =(4))()(1ωj Y t y f Ff ??→←-三、调制解调(1)调制(2)解调f )(t )]()([21)(c c c F F t Cos t f ωωωωω++-?)]2()2([1)(1]2)()([21)()(c c c c c c F F F t Cos t f t f t tCos Cos t f t Cos t y ωωωωωωωωω++-+?+==(1)系统零状态响应的求解(2)系统函数的求解和分析(3)系统的频谱分析(调制解调)连续信号复频域分析⼀、拉普拉斯变换(1)定义:??∞+∞-∞∞--==j j st st ds e s F j t f dt e t f s F σσπ)(21)()()((2)收敛域(3)基本性质双边拉普拉斯变换单边拉普拉斯(4)常⽤变换(5)拉⽒逆变换a )部分分式法ΛΛ+-+-++-+-==-22111112111)()()()()(p s K p s K p s K p s K s D s N s F k k k []--=-==--=1))(()!1(1|))((1)1()1(1p s kk k k p s i i p s s F dsd k K p s s F K i重极点单极点b )留数法[]ip s stk i k k i i i i i e s F p s dsd k r r t u t f r t u t f t u t f t u t f t f =----=??-=-=-+=∑∑)()()!1(1)()()()()()()()()()1()1(收敛域右边所有极点收敛域左边所有极点⼆、电路元件的s 域模型(1)电阻)()(s I s U R =(2)电容)(1)0(1)(s I Csu s s U c c +=-(3)电感)0()()(--=Li s LsI s U三、线性系统的s 域分析法(1)根据换路前的电路(t<0)求初始状态(0-)(2))()(s F t f ? (3)作出换路后(t>0)的s 域电路模型(4)应⽤KCL 、KVL 、VAR 等求解响应(5)拉⽒逆变换求时域表达式和时域波形(1)信号的拉⽒变换(2)信号的逆变换(3)s 域的电路分析复频域系统函数和系统模拟⼀、s 域的系统函数H(s)(1)定义)()()(s F s Y s H f =(2)意义st st fe s H e t h t y t h s H )()()()()(=*=?(3)求解⽅法 a ))}({)(t h L s H =b )由s 域电路模型求解c )由系统零极点求解d )由模拟图、信号流图(梅森公式)求解⼆、系统模拟基础(1)系统的直接模拟ij s a sb s H n j jj mi ii ≥=∑∑==00)(直接II 其它模拟:并联:⽤部分分式展开级联:分为⼏个分式相乘(3)基本系统的模拟(4)梅森公式∑∑∑∑+-+-==inm rq p r q pn m i kkk L L LL L L g H ,,,11Λ三、系统稳定性判定极点在左半平⾯――稳定罗斯-霍尔维滋准则)()()(0s D s N H s H = 稳定条件: (1)D(s)不缺项(2)D(s)系数全为正或全为负(3)罗斯阵列MMMMΛΛΛΛ53153153142-----------n n n n n n n n n n n nd d d c c c a a a a a a 共n+1⾏1u c )0(-+ -)(s U c -zs 11和1-s a z a s ++11和1-az z a s s ++和y基本系统的模拟KΛΛ51511331311151413312111,11,1-----------------------=-=-=-=n n n n n n n n n n n n n n n n n n n n n n n n c c a a c d c c a a c d a a a a a c a a a a a c (4)罗斯判据:罗斯矩阵的第⼀列全为正,表明D(s)=0的根全部在左半平⾯(1)建⽴框图和流图(2)分析框图、流图(3)系统稳定性判定离散信号与系统时域分析(1)定义:注意,离散信号可以⽤连续信号的抽样获得(2)基本离散信号(3)离散信号的运算(5)典型序列的累加和(6)卷积和a )定义∑∞-∞=-=*k k n fk f n f n f ][][][][2121b )性质c )卷积和的求法①图解法②多项式乘、除法③列表法④解释法(1)信号的函数和波形互换(2)信号的变换(3)卷积运算离散信号Z 域分析⼀、z 变换(1)定义?∑∑-∞=-∞-∞=-===dz z z F j n f z n f z F z n f z F n n n I n n 10)(21][][)(][)(π逆变换单边双边正变换(2)收敛域(3)单边z 变换性质(4)常⽤单边z 变换(5)z 逆变换 a )部分分式法:按zz F )(展开,⽅法参考s 域的分析 b )留数法∑-=in z z F s n f ])([Re ][1c )幂级数展开(长除法)⼆、离散系统的z 域分析步骤:(1)建⽴系统的差分⽅程(2)对差分⽅程进⾏单边z 变换(考虑初始状态),得z 域的代数⽅程(3)解代数⽅程,得响应的z 域解(4)进⾏z 逆变换,得响应的时域解三、z 域系统函数(1)定义)()()(z F z Y z H f =(2)意义nn z z H z n h n y n h Z z H )(][][]}[{)(=*==(3)H(z)的求法a )由差分⽅程进⾏z 变换(不考虑初始状态)b )有零极点求得c )由模拟图、信号流图(梅森公式)四、离散系统模拟参考s 域分析五、系统稳定性稳定系统:极点:所有极点应该在单位圆内。

信号与系统主要公式和内容摘要一.单位冲激信号()t δ的基本特性: 1. √()()()()()0t x dt t t t x dt t t t x =+=-⎰⎰∞∞-∞∞-δδ2.()()()⎩⎨⎧><=⎰0ab ab dt t t b aϕδϕ3.()()t aat δδ1=4. √ ()()()()000t t t x t t t x -=-δδ5. ()()t t δδ=- 偶函数6.()()t dtt du δ= ()()t u d t =⎰∞-ττδ 7. ()()()t x t t x =*δ ()()()00t t x t t t x -=-*δ 8. ()()()2121t t t t t t t --=-*-δδδ 9. ()()()t x t t x '='*δ ()()()ττd x t u t x t⎰∞-=*10. 若:()()()t x t x t y 21*=则:()()()()()t x t x t x t x t y 2121'*=*'=' ()()()()()()()()t x t x t x t x t y 1212111---*=*=()()()212211t t t y t t x t t x --=-*- 二.单位脉冲序列[]n δ的基本特性: 1. [][]∑+∞=-=k k n n u δ [][]∑-∞==nk k n u δ √[][][]1--=n u n u n δ2. √[][][][]000n n n x n n n x -=-δδ√[][][]n x n n x =*δ √[][][]00n n x n n n x -=-*δ 3. [][][]k n k x n x k -=∑∞-∞=δ特殊:()()()()t r t tu t u t u ==* [][]()[]n u n n u n u 1+=* 1欧拉公式:()()()[]()[]⎪⎪⎪⎩⎪⎪⎪⎨⎧-=+=+=--t j t j t j t j t j e e j t Sin e e t Cos t jSin t Cos e ααααααααα2121三.线性时不变系统(LTI 系统)的主要特性 1. 线性:(1) 无初值:()()()()t y a t y a t x a t x a 22112211+→+ [][][][]n y a n y a n x a n x a 22112211+→+ (2) 含初值:若:()()()t y x t f 1110→⎥⎦⎤⎢⎣⎡ ()()()t y x t f 2220→⎥⎦⎤⎢⎣⎡ 则:()()()()()()t y t y x t f x t f 21221100βαβα+→⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡[][][][][][]k y k y x k f x k f 21221100βαβα+→⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡ 2. 时不变性:()()00t t y t t x -→- [][]00n n y n n x -→- 3. 微(差)分性:()()dtt dy dt t dx → [][]k n y k n x -→- 4. 积分(累加)特性:()()⎰⎰→ttd y d x 0ττττ [][]∑∑==→Nk Nk k y k x 05. 因果性:若:()0=t h ,当0<t 时 √若:[]0=n h ,当0<n 时 6. 稳定性:()∞<⎰∞∞-ττd h √[]∑∞-∞=∞<k k h27. 卷积特性: ()()()()()()()ττττττd t x h d t h x t h t x t y f ⎰⎰∞∞-∞∞--=-=*=[][][][][][][]k n x k h k n h k x n h n x n y k k f -=-=*=∑∑∞-∞=∞-∞=有:()()()ωωωj H j X j Y f =()()()S H S X S Y f =()()()Z H Z X Z Y f =四.信号的基本运算: 1. 相加:()()()t x t x t y 21+= [][][]n x n x n y 21+=2. 相乘:()()()t x t x t y 21= [][][]n x n x n y 21=3. 幅度加权:()()t x t y α= [][]n x n y α=4. 反折:()()t x t y -= [][]n x n y -=5. 时移:()()0t t x t y -= [][]0n n x n y -=00>t (或00>n )为右移,00<t (或00<n )为左移 6. 尺度变换:(1) 连续时间信号的尺度变换:()()at x t y =1>a 时,表示()t x 在时间轴上被压缩a 倍 1<a 时,表示()t x 在时间轴上被扩展a 倍(2) 离散时间信号的内插与抽取: 内插:[]⎥⎦⎤⎢⎣⎡→L k f k f , L 为正整数[]0f 不动,在序列2点之间插入1-L 个零点 3抽取:[][]Mk f k f →, M 为正整数[]0f 不动,在原序列中每隔1-M 点抽取一点 7. 微分(差分): ()()dtt dx t y =[][][]1--=n x n x n y8. 积分(累加): ()()ττd x t y t⎰∞-= [][]∑-∞==nk k x n y9. 卷积()()()()()()()ττττττd t x x d t x x t x t x t y -=-=*=⎰⎰∞∞-∞∞-122121[][][][][][][]k n x k x k n x k x n x n x n y k k -=-=*=∑∑∞-∞=∞-∞=122121五.几何级数的求值公式:1. ⎪⎪⎩⎪⎪⎨⎧=+≠--=+=∑1111121220a n a a a a n n n n2. ⎪⎪⎩⎪⎪⎨⎧=+-≠--=+=∑11111212121a n n a a a a a n n n n n n210n n ≤<3.aa n n -=∑+∞=110 1<a 4. a a a n n-=∑+∞=11 1<a 5. a a a n n n n-=∑+∞=1111<a六.傅里叶变换、拉普拉斯变换、Z 变换 1.LTI 系统对虚指数信号的响应:→t j e ω()()t j e j H t y ωω=→()()()tjn n n n tjn n e jn H C t y eC t f 000ωωω∑∑∞-∞=∞-∞==→=42.傅里叶级数公式: ()∑∞-∞==n tjn n eC t x0ω 其中:()dt e t x T C tjn Tn 01ω-⎰= 3. 傅里叶变换公式(系统稳定):(1)非周期信号:()()ωωπωd ej X t x tj ⎰∞+∞-=21()()dt e t x j X t j ωω-∞+∞-⎰=条件:()⎰∞+∞-∞<dt t x 或()⎰∞+∞-∞<dt t x 2(2)周期信号:()∑∞-∞==k t jk k e a t xω()()∑∞-∞=-=k k k a j X 02ωωδπω 002T πω=()dt e t x T a tjk Tk 01ω-⎰=4. 拉普拉斯变换公式: ()()dt et x S XtS -∞-⎰=0 ()()dS e S X j t x t S j j ⎰∞+∞-=σσπ215. Z 变换公式: ()[]n n Z n x Z X -∞=∑=[]()dZ Z Z X j n x n C121-⎰=π6. 典型信号的三种变换公式:(1)√()1−→←FTt δ√()1−→←LT t δ √()()n LTn S t −→←δROC:整个S 平面√[]1−→←Zn δ ROC:整个Z 平面 (2) √()00t j FTe t t ωδ-−→←-√()00t S LT e t t -−→←-δ ROC:整个S 平面√[]00nZ Z n n -−→←-δROC:整个Z 平面(可能去除0=Z )(3) ()()ωπδω+−→←j t u FT15()St u LT1−→← ROC:{}0>S R e √ []111--−→←Zn u ZROC: 1>Z (4) ()ωj a t u eFTat+−→←-1{}0>a R e√()a S t u eLTat+−→←-1ROC: {}a S R e -> []111--−→←aZn u a Z nROC: a Z > (5) ()()21ωj a t u teFTat+−→←- {}0>a R e()()21a S t u teLTat+−→←- ROC: {}a S R e ->()[]()21111--−→←+aZ k u a k Zk ROC: a Z >(6)()∑∑+∞-∞=+∞-∞=-−→←k kFTk tjk kk a ea 020ωωδπω(7) ()020ωωπδω-−→←FT tj e()020ωωπδω+−→←-FTt j e(8) ()ωπδ21−→←FT(9) √()()[]000ωωδωωδπω++-−→←FTt Cos()220)(ωω+−→←S S t u t Cos LTROC: {}0>S R e(10) ()()[]000ωωδωωδπω--+−→←j t Sin FT()2020)(ωωω+−→←S t u t Sin LTROC: {}0>S R e (11) ()∑∑∞-∞=∞-∞=⎪⎭⎫ ⎝⎛-−→←-k FTn T kT nT t πωδπδ226(12) −→←FTT ASa T )(211ω(13) −→←FTtt ASin πλ√()()21ωSa t p FT−→← ()()()2211ωSa t p t p FT−→←* 七.傅里叶变换、拉普拉斯变换、Z 变换的主要性质设:()S X :ROC {}0Re σ>S ()Z X :ROC Rf Z > 1. 线性:()()()()ωωj bY j aX t by t ax FT+−→←+()()()()S bY S aX t by t ax lT +−→←+ ROC :公共收敛域 [][]()()Z bY Z aX n by n ax ZT +−→←+ ROC :公共收敛域2. 时移: √()()ωωj X e t t xt j FT00-−→←-√()()S X e t t xt S LT 00-−→←- 要求:右移,即00>tROC :未变因果序列:√[][]()Z X Z n n u n n xn ZT00-−→←-- 要求:右移,即00>nROC :未变非因果序列:√[][]()[]111-+−→←--x Z X Z n u n x ZT√ [][]()[][]21212-+-+−→←---x x Z Z X Zn u n x ZT73. 频移:()()[]00ωωω-−→←j X t x e FTt j()()00S S X t x e LT tS -−→← ROC: {}00Re σ>-S S []⎪⎭⎫ ⎝⎛−→←a Z X n x a ZT n ROC: Rf a Z >()[]()Z X n x ZTn -−→←-1 ROC:Rf Z >-4.反折:()()ωj X t x FT -−→←-()()S X t x LT -−→←- ROC: {}0Re σ>-S5.尺度变换:()⎪⎭⎫ ⎝⎛−→←a j X a at x FT ω1 √()⎪⎭⎫ ⎝⎛−→←a S X a at x LT1 ROC :0Re σ>⎭⎬⎫⎩⎨⎧a S6.卷积:√()()()()ωωj Y j X t y t x FT−→←*()()()()S Y S X t y t x LT−→←* ROC :公共收敛域 [][]()()Z Y Z X n y n x ZT −→←* ROC :公共收敛域7.时域微分:()()ωωj X j t x dtd FT−→←:未修正 不含初值:√()()S SX t x dt d LT −→← √()()S X S t x dtd n LTn n −→← 含初值: √()()()--−→←0x S SX t x dt d LT √ ()()()()--'--−→←00222x Sx S X S t x dtd LT 8.频域微分: 8()()ωωj X d djt tx FT−→← ()()S X dSd t tx LT-−→← ROC :未变[]()dZZ dX Z n nx ZT-−→← ROC :未变9.积分(累加):()()()()ωδπωωττ01X j X j d x FTt +−→←⎰∞- ()()S X Sd x LTt1−→←⎰-ττ ROC :{})0,max(Re 0σ>S []()Z X Zn x ZT kn 111-=-−→←∑ ROC :),1max(Rf Z > 10.调制(频域卷积):()()()(){}ωωπj Y j X t y t x FT *−→←2111.对偶:若:()()ωj F t g FT−→← 则:()()ωπ-−→←g jt F FT2 八.系统函数: 1.连续系统:()()∑∑===Nk M k kk k k k k dt t x d b dt t y d a 00√()()()()()∑∑====Nk kk kMk k j a j b j X j Y j H 00ωωωωω√()()()∑∑====Nk kk Mk kk f Sa Sb S X S Y S H 0()()ωωπωd ej H t h tj ⎰∞∞-=21()()dS e S H j t h t S j j ⎰∞+∞-=σσπ212. 离散系统:[][]∑∑==-=-Mk kN k kk n x b k n y a 0√()()()k Nk k Mk Kk f Z a Zb Z X Z Y Z H -==-∑∑==[]()dZ Z Z H j n h n C121-⎰=π3. 系统的因果性:(1)连续系统:S 域 一个具有有理系统函数H(S)的LTI 系统,其因果性等价于H(S)的ROC 位于S 平面上最右边极 点的右半平面。

周期信号与非周期信号连续时间信号:()()f t f t kT =+0,1,2,k =±±⋅⋅⋅⋅⋅⋅ 离散时间信号:()()x n x n kn =+0,1,2,k =±±⋅⋅⋅⋅⋅⋅000()j t j t T e e ωω+=002T πω=00()j n j n N e e ωω+=02N k πω=为整数能量信号和功率信号 连续时间信号2|()|E f t dt ∞-∞=⎰2221|()|T T P f t dt T =⎰(周期信号) 2221|()|lim TT T f t T P dt →∞-=⎰(非周期信号)离散时间信号2|()|n E x n ∞=-∞=∑21|()|21N n N P x n N =-=+∑(周期信号) 21()21lim Nn NN P x n N =-→∞=+∑(非周期信号) 1、能量信号:E 有限0E <<∞,0P =; 2、功率信号:P 有限0P <<∞,P =∞;3、若E P →∞→∞,,则该信号既不是能量信号也不是功率信号;4、一般周期信号是功率信号。
线性系统)()()()()()()()(221122112211t y a t y a t x a t x a t y t x t y t x +→+→→,则,若 )()()()()()()()(221122112211n y a n y a n x a n x a n y n x n y n x +→+→→,则,若时不变系统)()()()(00t t y t t x t y t x -→-→,则若 )()()()(00t n y n n x n y n x -→-→,则若系统时不变性:1电路分析:元件的参数值是否随时间而变化 2方程分析:系数是否随时间而变3输入输出分析:输入激励信号有时移,输出响应信号也同样有时移i关系狄利克雷(Dirichlet)条件(只要满足这个条件信号就可以利用傅里叶级数展开)(1)在一周期内,如果有间断点存在,则间断点的数目应是有限个。
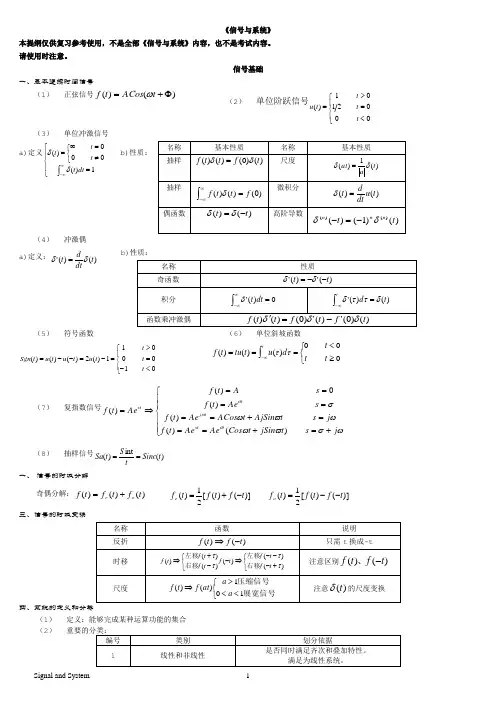
《信号与系统》本提纲仅供复习参考使用,不是全部《信号与系统》内容,也不是考试内容。
请使用时注意。
信号基础一、基本连续时间信号(1) 正弦信号)()(Φ+=t ACos t f ω(2) 单位阶跃信号⎪⎩⎪⎨⎧<=>=000011)(t t t t u(3) 单位冲激信号a)定义⎪⎩⎪⎨⎧=⎩⎨⎧≠=∞=⎰∞∞-1)(000)(dt t t t t δδ b)性质:(4) 冲激偶 a)定义:)()('t dtd t δδ=b)性质:(5) 符号函数⎪⎩⎪⎨⎧<=>-=-=--=0001011)(2)()()(t t t t u t u t u t Sgn(6) 单位斜坡函数⎩⎨⎧≥<===⎰∞-000)()()(t t td u t tu t f t ττ (7) 复指数信号ωσωσϖωϖωσωσj s j s s s t jSin t Cos Ae Ae t f tAjSin t ACos Ae t f Ae t f A t f Ae t f t st tj tst +====⎪⎪⎩⎪⎪⎨⎧+==+====⇒=0)()()()()()((8) 抽样信号)(int )(t Sinc t S t Sa ==一、 信号的时域分解奇偶分解:)()()(t f t f t f o e += )]()([21)()]()([21)(t f t f t f t ft f t f o e --=-+=三、信号的时域变换四、系统的定义和分类(1) 定义:能够完成某种运算功能的集合 (2)五、LTI 线性时不变系统的性质(1) 信号的函数和波形互换a) 由函数画波形(列举关键点、微积分关系、分段函数) b) 由波形求函数(分段函数用u(t)描述) (2) 含有奇异函数的运算 a) 注意抽样特性⎰dt t f t t f t )()()()(δδ和的区别 b) 注意积分的区间(3) 信号的变换(通常先反折再时移最后展缩较简易)(4) 系统类型的判定(根据定义判定,线性性可以分解讨论)连续系统时域分析一、系统的数学模型1.系统用常系数非齐次微分方程描述f b f b f b f b y a y a y a y a n n n n n n n n 0)1(1)1(1)(0)1(1)1(1)(++++=++++----2.全响应的求解的基本步骤:全响应y(t)=y x (t)+y f (t)二、全响应的三、冲激和阶跃响应⎰∞-==td h t g t g dt d t h ττ)()()()(四、卷积积分1.定义⎰∞∞--=*=τττd t f f t f t f ty )()()()()(21212.性质(1)微分方程的求解(2)卷积的运算(a )图解法(b )解析法(使用公式和性质)连续信号的频域分析一、非周期信号的频域分析 (1)傅立叶变换⎰⎰∞∞-∞∞--==ωωπωωωd e j F t f dte tf j F t j t j )(21)()()((2)性质(3)常用变换对四、抽样定理(1)抽样信号)()()(t t f t f T s δ=(2)时域抽样定理 抽样信号能恢复原始信号的条件: a )原始信号为限带信号 b )抽样间隔mm s ms f T ωπωω=≤≥212(1)频谱分析(2)信号的频域分析或频域简化(3)抽样连续系统的频域分析一、频域系统函数(1)定义)()()(ωωωj F j Y j H f =(2)含义)]([)()()()(t h F j H t h t f t y f =*=ω(3)H(j ω)的求解 a ))]([)(t h F j H =ωb )频域电路模型求解(4)频率特性)(|)(|)(ωϕωωj e j H j H =二、非周期信号激励下系统零状态响应的求解 步骤:(1))()(ωj F t f ↔ (2)求)(ωj H(3))()()(ωωωj F j H j Y f =(4))()(1ωj Y t y f Ff −−→←-三、调制解调 (1)调制 (2)解调f )(t )]()([21)(c c c F F t Cos t f ωωωωω++-↔)]2()2([1)(1]2)()([21)()(c c c c c c F F F t Cos t f t f t tCos Cos t f t Cos t y ωωωωωωωωω++-+↔+==(1)系统零状态响应的求解(2)系统函数的求解和分析(3)系统的频谱分析(调制解调)连续信号复频域分析一、拉普拉斯变换 (1)定义:⎰⎰∞+∞-∞∞--==j j st st ds e s F j t f dt e t f s F σσπ)(21)()()((2)收敛域(3)基本性质 双边拉普拉斯变换单边拉普拉斯(4)常用变换(5)拉氏逆变换a )部分分式法+-+-++-+-==-22111112111)()()()()(p s K p s K p s K p s K s D s N s F k k k []⎪⎩⎪⎨⎧--=-==--=1))(()!1(1|))((1)1()1(1p s kk k k p s i i p s s F ds d k K p s s F K i 重极点单极点b )留数法[]ip s stk i k k i i i i i e s F p s dsd k r r t u t f r t u t f t u t f t u t f t f =----=⎪⎩⎪⎨⎧-=-=-+=∑∑)()()!1(1)()()()()()()()()()1()1(收敛域右边所有极点收敛域左边所有极点二、电路元件的s 域模型(1)电阻)()(s I s U R =(2)电容)(1)0(1)(s I Csu s s U c c +=-(3)电感)0()()(--=Li s LsI s U三、线性系统的s 域分析法(1)根据换路前的电路(t<0)求初始状态(0-) (2))()(s F t f ↔ (3)作出换路后(t>0)的s 域电路模型 (4)应用KCL 、KVL 、VAR 等求解响应(5)拉氏逆变换求时域表达式和时域波形(1)信号的拉氏变换 (2)信号的逆变换 (3)s 域的电路分析 复频域系统函数和系统模拟一、s 域的系统函数H(s)(1)定义)()()(s F s Y s H f =(2)意义st st fe s H e t h t y t h s H )()()()()(=*=↔(3)求解方法 a ))}({)(t h L s H =b )由s 域电路模型求解c )由系统零极点求解d )由模拟图、信号流图(梅森公式)求解二、系统模拟基础(1)系统的直接模拟ij s a sb s H n j jj mi ii ≥=∑∑==00)(直接II 其它模拟:并联:用部分分式展开 级联:分为几个分式相乘(3)基本系统的模拟(4)梅森公式∑∑∑∑+-+-=∆∆∆=inm rq p r q pn m i kkk L L LL L L g H ,,,11三、系统稳定性判定极点在左半平面――稳定 罗斯-霍尔维滋准则)()()(0s D s N H s H = 稳定条件: (1)D(s)不缺项(2)D(s)系数全为正或全为负(3)罗斯阵列53153153142-----------n n n n n n n n n n n nd d d c c c a a a a a a 共n+1行1u c )0(-+ -)(s U c -zs 11和1-s a z a s ++11和1-az z a s s ++和y基本系统的模拟51511331311151413312111,11,1-----------------------=-=-=-=n n n n n n n n n n n n n n n n n n n n n n n n c c a a c d c c a a c d a a a a a c a a a a a c (4)罗斯判据:罗斯矩阵的第一列全为正,表明D(s)=0的根全部在左半平面(1)建立框图和流图 (2)分析框图、流图(3)系统稳定性判定离散信号与系统时域分析(1)定义:注意,离散信号可以用连续信号的抽样获得(2)基本离散信号(3)离散信号的运算(5)典型序列的累加和(6)卷积和a )定义∑∞-∞=-=*k k n fk f n f n f ][][][][2121b )性质c )卷积和的求法①图解法②多项式乘、除法③列表法④解释法(1)信号的函数和波形互换 (2)信号的变换(3)卷积运算离散信号Z 域分析一、z 变换(1)定义⎰∑∑-∞=-∞-∞=-=⎪⎪⎩⎪⎪⎨⎧==dz z z F j n f z n f z F z n f z F n n n I n n 10)(21][][)(][)(π逆变换单边双边正变换 (2)收敛域(3)单边z 变换性质(4)常用单边z 变换(5)z 逆变换 a )部分分式法:按zz F )(展开,方法参考s 域的分析 b )留数法∑-=in z z F s n f ])([Re ][1c )幂级数展开(长除法)二、离散系统的z 域分析步骤: (1)建立系统的差分方程 (2)对差分方程进行单边z 变换(考虑初始状态),得z 域的代数方程 (3)解代数方程,得响应的z 域解 (4)进行z 逆变换,得响应的时域解 三、z 域系统函数 (1)定义)()()(z F z Y z H f =(2)意义nn z z H z n h n y n h Z z H )(][][]}[{)(=*==(3)H(z)的求法a )由差分方程进行z 变换(不考虑初始状态)b )有零极点求得c )由模拟图、信号流图(梅森公式)四、离散系统模拟 参考s 域分析 五、系统稳定性 稳定系统: 极点:所有极点应该在单位圆内。
信号与系统概念公式11总结.doc信号与系统概念公式总结引言信号与系统是电子工程和信号处理领域的基础概念,它们涉及信号的分析、处理和变换。
在本文档中,我们将总结信号与系统的基本概念、分类和相关的数学公式。
信号的分类1. 连续时间信号与离散时间信号连续时间信号:信号值随时间连续变化,通常用函数 ( x(t) ) 表示。
离散时间信号:信号值在离散的时间点上定义,通常用序列 ( x[n] ) 表示。
2. 确定性信号与随机信号确定性信号:信号的值可以通过确定的数学关系预测。
随机信号:信号的值具有随机性,通常需要通过统计方法来描述。
3. 能量信号与功率信号能量信号:信号的能量总和是有限的,即 ( \int_{-\infty}^{\infty} |x(t)|^2 dt < \infty )。
功率信号:信号的平均功率是有限的,即 ( \lim_{T \to \infty}\frac{1}{2T} \int_{-T}^{T} |x(t)|^2 dt < \infty )。
系统的定义系统可以被定义为将输入信号转换为输出信号的数学模型。
系统通常具有以下特性:1. 线性如果系统满足加法和标量乘法的属性,即对于任意的输入信号( x_1(t) ) 和 ( x_2(t) ) 以及任意常数 ( a ) 和 ( b ),有:[ y_1(t) = ax_1(t) + bx_2(t) ]则系统是线性的。
2. 时不变性如果系统的时间响应不随时间变化而变化,即对于任意的 ( t_0 ) 有:[ y(t) = x(t-t_0) ]则系统是时不变的。
3. 因果性如果系统的输出仅依赖于当前和过去的输入值,即 ( y(t) ) 仅由( x(t) ) 在 ( t \leq t_0 ) 的值决定,则系统是因果的。
信号与系统的数学工具1. 傅里叶变换傅里叶变换是分析连续时间信号的有力工具,其定义为:[ X(f) = \int_{-\infty}^{\infty} x(t) e^{-j2\pi ft} dt ] 2. 拉普拉斯变换拉普拉斯变换是分析线性时不变系统的重要工具,其定义为:[ X(s) = \int_{0}^{\infty} x(t) e^{-st} dt ]3. Z变换Z变换用于分析离散时间信号,其定义为:[ X(z) = \sum_{n=-\infty}^{\infty} x[n] z^{-n} ]线性时不变系统线性时不变系统(LTI系统)是信号处理中的核心概念。
信号与系统公式总结信号与系统是电子工程、通信工程、自动控制等领域中的重要基础课程,它研究了信号的传输、处理以及系统的行为特性。
在学习信号与系统的过程中,我们需要掌握一些基本的数学公式,以便更好地理解和分析信号与系统的特性。
本文将对信号与系统中常用的公式进行总结和归纳,以帮助读者更好地掌握和应用。
一、信号的表示在信号与系统中,我们常常遇到时域信号、频域信号和复域信号。
它们分别通过不同的数学表示方法来描述。
1. 时域信号时域信号使用时间作为自变量进行描述,常用的时域信号表示方法有:- 脉冲函数(Impulse Function):δ(t)是一个函数,当t=0时取值为无穷大,其他时刻取值为零,即δ(t) = ∞,t = 0;δ(t) = 0,t ≠ 0。
- 阶跃函数(Step Function):u(t)是一个函数,当t≥0时取值为1,t<0时取值为0。
- 矩形函数(Rectangular Pulse):rect(t/T)是一个函数,在|t| < T/2时取值为1,其他时刻取值为零。
2. 频域信号频域信号使用频率作为自变量进行描述,常用的频域信号表示方法有:- 正弦函数(Sine Function):f(t)=A*sin(2πft+φ)是一个函数,A为振幅,f为频率,φ为相位。
- 余弦函数(Cosine Function):g(t)=A*cos(2πft+φ)是一个函数,A为振幅,f为频率,φ为相位。
- 脉冲函数的频谱:脉冲函数的频谱是一个常数,即频率的绝对值小于无穷大的所有频率分量都具有相同的幅度。
3. 复域信号复域信号使用复数表示,并且可以同时描述时域信息和频域信息。
常用的复域信号表示方法有:- 复指数函数(Complex Exponential Function):x(t) = Ae^(2πft+jφ),其中A为振幅,f为频率,φ为相位。
二、线性时不变系统在信号与系统中,线性时不变系统(LTI system)是一类重要的系统。
a 2 +b 2 ⎰ i i11i TT信号与系统概念,公式集:第一章:概论1. 信号:信号是消息的表现形式。
(消息是信号的具体内容)2. 系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1. 复数的两种表示方法:设 C 为复数,a 、b 为实数。
常数形式的复数 C=a+jb a 为实部,b 为虚部;或 C=|C|e j φ,其中,| C |= 为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2. 欧拉公式: e jwt= c os wt + j sin wt (前加-,后变减)第三章:正交函数集及信号在其上的分解1. 正交函数集的定义:设函数集合 F= { f 1 (t ), f 2 (t ), f n (t )}如果满足: T 2f i (t ) f T 1Tj (t )dt = 0i ≠ j 2f 2 (t )dt = K T 1i = 1,2 n则称集合 F 为正交函数集 如果 K i = 1i = 1,2, n ,则称 F 为标准正交函数集。
如果 F 中的函数为复数函数 2 f (t ) ⋅ f *(t )dt = 0i ≠ j ⎰T ij条件变为: 2f (t ) ⋅ f *(t )dt = Ki = 1,2 n⎰T i i i其中 f *(t ) 为f i (t ) 的复共轭。
2. 正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数⎰n1 11 1 11 TTTT在这个坐标系统中的坐标。
3. 正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如 果 在 正 交 函 数 集 g 1 (t ), g 2 (t ), g 3 (t ), g n (t ) 之 外 , 不 存 在 函 数 x ( t )0 < t 2x 2(t )dt < ∞ ,满足等式: t 2x (t )g (t )dt = 0 ,则此函数集称为完备正交函数集。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部; 或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wt j wt e jwtsin cos +=(前加-,后变减) 第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n = 如果满足:ni K dt t f j i dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f j i dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义:一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义:如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dt t x ,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。
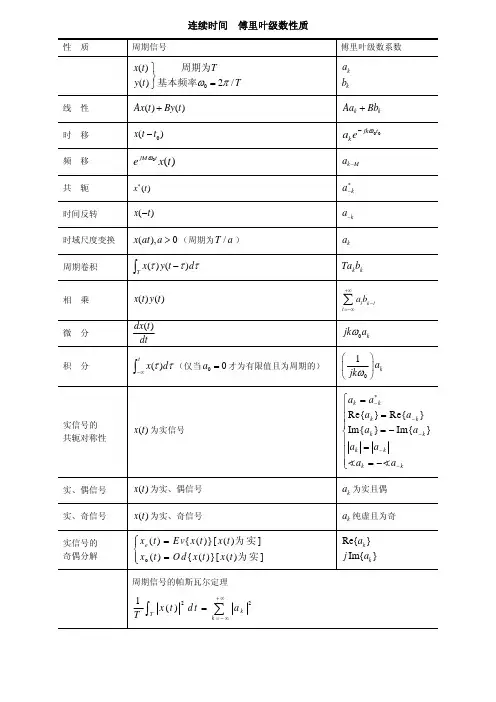
2)(10}Re{),(jw a a t u te at+↔>-natn jw a a t u e n t )(10}Re{),()!1(1+↔>---0,21)],()([sin 11000==-=+--↔-k a ja a w w w w t w δδπkk k t jkw k k akw w a e a ),(200-↔∑∑∞-∞=∞-∞=δπ其余k a a kw w e k tjkw ,0,1),(2100==-↔πδ0,21)],()([cos 11000===++-↔-k a a a w w w w t w δδπ0,1),(21)(0==↔=k a a w t x πδπππk T kw kw c T w k T kw T t T T t t x k 1010101011sin )T (sin sin 22||,0||,1)(=↔⎪⎩⎪⎨⎧≤<<=∑∞-∞=级:k ,1),2(2)(对全部T a T k w T nT t k k n =-↔-∑∑∞-∞=∞-∞=πδπδw wT T t T t t x 111sin 2||,0||,1)(↔⎩⎨⎧><⎩⎨⎧><=↔W w Ww jw X tWt ||,0||,1)(sin π1)(↔t δ)(1)(w jw t u πδ+↔0)(0jwte t t -↔-δjw a a a t u e at+↔>-1}Re{),(连续时间傅里叶变换 ∑∑∞-∞==-↔k k n N jk N k k a Nkw e a ),2(2)/2()(πδππ⎩⎨⎧±±==--↔∑∞-∞=kNm N m m k a l w w e k l n jw 其余级数,02,,,1:)2(200πδπ⎩⎨⎧±±±±±==-++--↔∑∞-∞=其余级数,02,,,1:)}2()2({cos 000Nm N m m k a l w w l w w n w k l πδπδπ⎪⎪⎪⎩⎪⎪⎪⎨⎧±--=-±±==-----↔∑∞-∞=k ,0,,212,,,21:)}2()2({s 000其余级数Nr r k j N r N r r k j a l w w l ww jn inw k l πδπδπ⎩⎨⎧±±==-↔=∑∞-∞=k,02,,0,1)2(21][其余NN k a l w n x k l πδπNN k NN a Nk k N k N N N k a N k w a N n N N n n x k kk k 2,,0,12,0,]2/2sin[)]2/1)(/2sin[()2(22/||,0||,1][1111±±=+=±=≠+-↔⎩⎨⎧≤<≤=∑∞-∞=πππδπk 1:)2(2][对于全部级数Na N kw N kN n k k k k =-↔-∑∑∞-∞=∞-∞=πδπδ0][0jwn en n -↔-δ2)1(11||],[)1(jw n ae a n u a n --↔<+离散时间傅里叶变换jwn ae a n u a --↔<111||],[)2/sin()]2/1(sin[||,0||,1][11w N w N n N n n x +↔⎩⎨⎧>≤ππππππ2,||,0||0,1)(0),(sin sin =⎩⎨⎧≤<≤≤=↔<<=T w W Ww w X W Wc W n W n n 1][↔n δ∑∞-∞=--+-↔k jw k w e n u )2(11][ππδrjw n ae n u a r n r n )1(11][)!1(!)!1(--↔<--+)()()()(jw bY jw aX t by t ax +↔+线性:)()(00jw X e t t x jw t -↔-时移:)(()(00w w j X t x e t jw -↔频移:)()(**jw X t x -↔共轭:)()(jw X t x -↔-时间反转:)(||1)(a jw X a at x ↔尺度变换:)()()(*)(jw Y jw X t y t x ↔卷积:)(*)(21)()(jw Y jw X t y t x π↔相乘:)()(jw jwX t x dtd ↔时域微分:⎰+↔∞)()0()(1)(t -w X jw X jwdt t x δπ积分:)()(jw X dwdjt tx ↔频域微分:⎪⎪⎪⎩⎪⎪⎪⎨⎧=-=--=-=--∠=∠↔)()(|)(||)(|)}(Im{)}(Im{)}(Re{)}({Re )()()(*jw X jw X jw X jw X jw X jw X jw X jw X jw X jw X t x 实共轭对称:ωπd jw X dt t x 22-|)(|21|)(|⎰⎰∞∞-∞∞=帕斯瓦尔:连续时间傅里叶变换性质)()(][][jw jw e bY e aX n by n ax +↔+线性:)(][00jw jwn e X e n n x -↔-时移:)(][)(00w w j n jw e X n x e -↔频移:)(][**jw e X n x -↔共轭:)(][jw e X n x -↔-时间反转:)(X k n 0k n ],/[][)(jkw k e k n x n x ↔⎩⎨⎧=的倍数不为,的倍数为若时域扩展:)()(][*][jw jw e Y e X n y n x ↔卷积:θπθθπd e Y e X n y n x w j j )()(21][][)(2-⎰↔相乘:)时域差分:jw jw e X e n x n x ()1(]1[][--↔--∑∑∞-∞=--∞=-+-↔k j jw jw k k w e X e X e k x )2()((11][0n πδπ)累加:dwe dX jn nx jw)(][↔频域微分:dwe X n x jw n 222|)(|21|][|⎰∑=∞-∞=ππ帕斯瓦尔定理:离散时间傅里叶变换性质S,1)(全部↔t δ0}Re{,1)(>↔s st u 0}Re{,1)(<↔--s st u 0}Re{,1)()!1(1>↔--s st u n t n n 0}Re{,1)-()!1(1<↔--s st u n t n n as sa t u e at ->+↔-}Re{,1)(as sa t u e at -<+↔--}Re{,1)(-as a s t u e n t n at n ->+↔---}Re{,)(1)()!1(1as a s t u e n t nat n -<+↔---}Re{,)(1)-()!1(-1S,T )-t (全部s T e -↔δ0}Re{,)(][cos 220>+↔s w s st u t w 0}Re{,)(][sin 20200>+↔s w s wt u t w 212121),()()()(R R s bX s aX t bx t ax 至少线性:+↔+Rs X e t t x s t ),()(00-↔-时移:]ROC R )([),(][:s 000中中,则就于在若的平移域平移s s R s s X t x e t s --↔]ROC s R s/a [/),(||1)(中就位于中,则在若时间尺度变换:aR a sX a at x ↔Rs X t x ),()(***↔共轭:212121),()()(*)(R R s X s X t x t x 至少卷积:↔R),(至少时域微分:s sX xt dtd↔Rs X dsdt tx s ),()(↔-域微分:}0}{Re{s R [)(1)()(t->↔⎰∞至少时域积分:s X sd x ττa s w a s as t u t w e at->+++↔-}Re{,)()(]cos [2020a s w a s w t u t w e at ->++↔-}Re{,)()(]sin [22000}Re{,1)]([)(>↔=-s st u t u n n 拉普拉斯变换njw N k ktjkw k k e a n x ea t x 00)()(->=<∞-∞=∑∑==∑∑>=<∞-∞===N k njkw kjw ktjkw k keeH a n y ejkw H a t y 000)()()()(0LTI 输入周期信号为x(t)或x(n),其输出y(t)或y(n)如下:∑⎰∞-∞=--∞∞-==n nstzn h z H dt et h s H )()()()(tjkw k kea t x 0)(∑∞-∞==dte t x Ta t jkw Tk 0)(1-⎰=连续时间级数 dwe e X n x jwn jw )(21][2⎰=ππ∑∞-∞=-=n jwnjwen x e X ][)( 离散时间级数∑>=<=N k njkw kea n x 0][∑>=<-=N k njkw k en x Na 0][1 离散时间级数连续时间傅里叶dwejw X t x jwt)(21)(⎰∞∞-=πdte t x jw X jwt-∞∞-⎰=)()(。
第一章绪论所有的信号与系统包含两个基本的共同点:即作为一个或几个独立变量函数的信号都包含了有关某些现象性质的饿信息;而系统总是对所给的信号做出响应,从而产生另外的信号,或产生某些所需的特性。
三种重要的信号1.信号具有有限的总能量,信号的平均功率必须为0.连续时间情况下:离散时间情况下:2.平均功率有限,总能量=∞连续时间情况下:离散时间情况下:3.和都不是有限的,一个例子就是信号离散时间单位脉冲(单位样本)和单位阶跃序列u[n]离散时间单位脉冲是离散时间单位阶跃的一次差分,离散时间阶跃是单位样本的求和函数连续时间单位阶跃和单位冲激函数连续时间单位冲激可看成连续时间单位阶跃u(t)的一次微分,连续时间单位阶跃是单位冲激的积分函数第二章线性时不变系统线性时不变系统之所以能够被深入分析的主要原因之一就是具有叠加性质。
这样,能够将线性时不变系统的输入用一组基本信号的线性组合来表示,就可以根据该系统对这些基本信号的响应,然后利用叠加性质求得整个系统的输出。
无论在离散时间或连续时间情况下,单位冲激函数的重要特性之一就是一般信号都可以表示为延迟冲激的线性组合。
这个事实,再与叠加性和时不变性结合起来,就能够用线性时不变的单位冲激响应来完全表征任何一个线性时不变系统的特性。
这样一种表示,在离散时间情况下称为卷积和,在连续时间情况下称为卷积积分,这种表示方式在分析线性时不变系统时提供了极大的便利。
在建立了卷积和与卷积积分之后,再用这些特性来分析线性时不变系统的某些其他性质。
然后讨论由线性常系数微分方程所描述的连续时间系统,由线性常系数差分方程所描述的离散时间系统。
线性空间里,讲了怎么把信号(离散和连续)表示成一组基(移位单位脉冲和移位单位冲激)的线性组合。
用脉冲表示离散时间信号:把任意一个序列表示成一串移位的单位脉冲序列的线性组合,而这个线性组合式中的权因子就是x[k]。
离散时间线性时不变系统的单位脉冲响应及卷积和表示y[n] = ,这个结果称为卷积和,或叠加和。
信号与系统概念,公式集:第一章:概论1.信号:信号是消息的表现形式。
(消息是信号的具体内容)2.系统:由若干相互作用和相互依赖的事物组合而成的具有特定功能的整体。
第二章:信号的复数表示:1.复数的两种表示方法:设C 为复数,a 、b 为实数。
常数形式的复数C=a+jb a 为实部,b 为虚部;或C=|C|e j φ,其中,22||b a C +=为复数的模,tan φ=b/a ,φ为复数的辐角。
(复平面)2.欧拉公式:wtj wt ejwtsin cos +=(前加-,后变减)第三章:正交函数集及信号在其上的分解1.正交函数集的定义:设函数集合)}(),(),({21t f t f t f F n =如果满足:ni K dt t f ji dt t f t f iT T i T T j i 2,1)(0)()(21212==≠=⎰⎰则称集合F 为正交函数集 如果n i K i ,2,11==,则称F 为标准正交函数集。
如果F 中的函数为复数函数条件变为:ni K dt t f t f ji dt t f t f iT T i i T T j i 2,1)()(0)()(2121**==⋅≠=⋅⎰⎰其中)(*t f i 为)(t f i 的复共轭。
2.正交函数集的物理意义: 一个正交函数集可以类比成一个坐标系统;正交函数集中的每个函数均类比成该坐标系统中的一个轴; 在该坐标系统中,一个函数可以类比成一个点;点向这个坐标系统的投影(体现为该函数与构成坐标系的函数间的点积)就是该函数在这个坐标系统中的坐标。
3.正交函数集完备的概念和物理意义: 如果值空间中的任一元素均可以由某正交集中的元素准确的线性表出,我们就称该正交集是完备的,否则称该正交集是不完备的。
如果在正交函数集()()()()t g n ,t g ,t g ,t g 321之外,不存在函数x (t )()∞<<⎰2120t t dtt x,满足等式:()()⎰=210t t i dt t g t x ,则此函数集称为完备正交函数集。