基于单片机自动车库门的设计
- 格式:doc
- 大小:81.00 KB
- 文档页数:13

基于单片机的智能停车系统设计与实现智能停车系统是现代城市交通管理中的重要组成部分,它通过利用技术手段提高停车场的使用效率和用户的体验,有效缓解交通拥堵和停车难问题。
基于单片机的智能停车系统设计与实现可以更好地满足用户的需求,提供便捷的停车服务和智能的管理功能。
一、系统设计与实现目标基于单片机的智能停车系统设计与实现的主要目标是提供以下功能:1. 车位检测与管理:通过车位检测器实时监测停车场内各个车位的使用情况,并将检测结果传输到主控单片机,实现车位的动态管理和分配。
2. 车辆识别与记录:利用车牌识别技术,对驶入停车场的车辆进行自动识别和记录,实现车辆的身份预判和进出记录。
3. 智能导航与引导:通过在停车场内设置导航屏幕或提供手机应用,实现车辆的智能导航和停车位的引导,提升用户的停车体验。
4. 支付与结算:用户可以通过系统提供的支付平台,完成停车费用的支付和结算,实现无现金停车,提高交易的便捷性和安全性。
5. 数据分析与统计:系统能够对停车场的使用情况进行数据分析和统计,实现通过数据驱动的停车管理与优化,为城市交通管理部门提供参考依据。
二、系统组成与工作流程基于单片机的智能停车系统通常由以下组件组成:1. 车位检测器:通过红外线、超声波或压力传感器等技术手段,实时感知车位的占用情况,并将信息传输给主控单片机。
2. 主控单片机:接收车位检测器传输过来的车位信息,对车位进行管理和分配,与其他模块进行数据交互和控制。
3. 车牌识别模块:利用图像处理和识别算法,对车辆的车牌进行识别,提取关键信息供系统使用。
4. 导航与引导模块:通过屏幕显示或手机应用,提供车辆的智能导航和停车位的实时引导,使用户能够快速找到空闲车位。
5. 支付与结算模块:用户通过系统提供的支付平台,完成停车费用的支付和结算。
6. 数据分析与统计模块:对停车场的使用情况进行数据统计和分析,生成报表供交通管理部门参考。
系统的工作流程如下:首先,车位检测器实时感知车位的占用情况,并将信息传输给主控单片机。

基于单片机的自动车库门设计随着汽车数量的不断增加,车库门的使用也越来越普遍。
传统的车库门需要人工操作,不仅麻烦,还有安全隐患。
基于单片机的自动车库门设计能够实现车库门的智能化控制,使车主能够方便快捷地进入和离开车库。
本文将介绍基于单片机的自动车库门的设计原理和功能。
基于单片机的自动车库门主要由以下几个部分组成:传感器、执行器、控制器和显示器。
传感器用于检测车辆的到来和离开,包括车辆探测器和红外线传感器。
执行器用于控制车库门的开关,包括电机和驱动器。
控制器用于接收传感器的信号并控制执行器的工作,实现车库门的自动开关。
显示器用于显示车库门的状态信息,包括电机的运行状态和门的开关状态。
在车辆进入车库的时候,车辆探测器会检测到车辆的到来,并发送信号给控制器。
控制器接收到信号后,会判断当前门的状态,如果门已经关闭,控制器会控制电机启动并打开车库门。
当车辆完全进入车库后,红外线传感器会检测到车辆位置,并发送信号给控制器。
控制器接收到信号后,会判断车辆是否已经停在合适的位置。
如果是,则控制器会控制电机关闭车库门。
在车辆离开车库的时候,车辆探测器会检测到车辆的离开,并发送信号给控制器。
控制器接收到信号后,会判断当前门的状态,如果门已经关闭,控制器会控制电机启动并打开车库门。
当车辆完全离开车库后,红外线传感器会检测到车辆位置,并发送信号给控制器。
控制器接收到信号后,会判断车辆是否已经离开完毕。
如果是,则控制器会控制电机关闭车库门。
在设计过程中,需要考虑以下几个问题。
首先是传感器的选择和位置。
传感器的选择应该能够准确地检测车辆的到来和离开,同时能够抵抗恶劣的环境条件。
传感器的位置应该离车辆进入和离开的位置足够近,可以准确地检测到车辆的到来和离开。
其次是执行器的选择和控制。
执行器的选择应该能够满足车库门的开关需求,并具有足够的承载能力。
执行器的控制应该能够根据传感器的信号进行自动控制,并具有足够的安全保护功能。
最后是控制器的设计和编程。
车位诱导程序:(1)系统初始化:一般情况,直接调用此函数将单片机系统时钟设置在72MHzSystemInit();程序中经常要用到延时函数,在这里为了提高CPU工作效率,不再使用死等待的演示方式,而是采用定时器作延时。
void Delay_Configuration(u8 SYSCLK){RCC_APB1PeriphClockCmd(Delay_RCC_APB1Periph_TIMx, ENABLE);TIM_PrescalerConfig(Delay_TIMx, SYSCLK, TIM_PSCReloadMode_Update);}(2)超声波检测模块初始化//超声波软件系统初始化void Sonic_Init(void){Sonic_RCC_Configuration();Sonic_GPIO_Configuration();Sonic_NVIC_Configuration();Sonic_TIM_Configuration();}://打开超声波需要使用的系统资源的时钟void Sonic_RCC_Configuration(void){RCC_APB2PeriphClockCmd(SONIC_RCC_APB2Periph_GPIOx_OUT|SONIC_RCC_APB 2Periph_GPIOx_IN,ENABLE);//打开时钟RCC_APB1PeriphClockCmd(SONIC_RCC_APB1Periph_TIMx,ENABLE);}//这里设置超声波检测所需要的引脚的相应功能void Sonic_GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/*············波形输出驱动超声波···········*/GPIO_InitStructure.GPIO_Pin=SONIC_GPIO_Pinx_OUT;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//GPIO_Init(SONIC_GPIOx_OUT,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = SONIC_GPIO_Pinx_IN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(SONIC_GPIOx_IN, &GPIO_InitStructure);}//打开中断,设置中断优先级void Sonic_NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //设置优先级NVIC_InitStructure.NVIC_IRQChannel=SONIC_TIMx_IRQn;//使能外部中断线1(IRQ通道)NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0; //先占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority=0; //从优先级NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);}//定时器的初始化配置void Sonic_TIM_Configuration(void){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM_ICInitTypeDef TIM_ICInitStructure;/*通用定时器配置*/TIM_TimeBaseStructure.TIM_Period =65535; //TIMx->ARR 设置自动装载值TIM_TimeBaseStructure.TIM_Prescaler =72; //TIMx->PSC 设置预分频器值TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;//设置时钟频率TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; /选择计数器模式TIM_TimeBaseInit(SONIC_TIMx, & TIM_TimeBaseStructure);TIM_OCStructInit(&TIM_OCInitStructure); //默认参数TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//模式1设置输出比较3模式TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置为输出TIM_OCInitStructure.TIM_Pulse =21; //设置捕获比较寄存器4值即占空长度TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;//设置输出极性-高电平TIM_OC4Init(SONIC_TIMx, &TIM_OCInitStructure); //初始化TIMx通道4.TIM_OC4PreloadConfig(SONIC_TIMx, TIM_OCPreload_Enable);//TIMx->CCMR2 OC4PE 输出比较4的预加载使能位TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;TIM_ICInitStructure.TIM_ICFilter = 0x0;TIM_PWMIConfig(SONIC_TIMx, &TIM_ICInitStructure);/* Select the TIM3 Input Trigger: TI2FP2 */TIM_SelectInputTrigger(SONIC_TIMx, TIM_TS_TI2FP2);/* Select the slave Mode: Reset Mode */TIM_SelectSlaveMode(SONIC_TIMx, TIM_SlaveMode_Reset);/* Enable the Master/Slave Mode */TIM_SelectMasterSlaveMode(SONIC_TIMx, TIM_MasterSlaveMode_Enable);/* TIM enable counter */TIM_Cmd(SONIC_TIMx, ENABLE);/* Enable the CC2 Interrupt Request */TIM_ITConfig(SONIC_TIMx, TIM_IT_CC2, ENABLE);}//定时器中断里边的内容void TIMx_IRQHandler(void){if(TIM_GetITStatus(SONIC_TIMx,TIM_IT_CC2)!=RESET){TIM_ClearITPendingBit(SONIC_TIMx,TIM_IT_CC2);value1=TIM_GetCapture2(SONIC_TIMx);if(value1!=0){value2=TIM_GetCapture1(SONIC_TIMx);}else{value1=0;value2=0;}time=value2;}}//12864液晶显示模块初始化//初始化液晶,引脚初始化,发送初始化命令void initlcd12864(){GPIO_Config();write_com(0x30);delayms(1);write_com(0x0c);//整体显示开游标关游标位置关delayms(1);write_com(0x01);delayms(5);}//液晶引脚资源初始化void GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOx|RCC_APB2Periph_GPIOy,ENAB LE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOx, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOy, &GPIO_InitStructure);}//打印显示汉字程序,包括设定显示坐标,显示内容void hanzi(unsigned char x,unsigned char y,unsigned char *z) //显示汉字字符{unsigned char pos;if(x==0)x=0x80;if(x==1)x=0x90;if(x==2)x=0x88;if(x==3)x=0x98;pos=x+y;write_com(pos);while(*z!='\0'){write_date(*z);z++;}}//主函数内容int main(void){u8 a,b,c,d;SystemInit();GPIO_Configuration();//串口引脚初始化USART_Configuration(9600);//串口初始化,方便系统调试Delay_Configuration(72);//系统延时函数初始化Sonic_Init();//超声波初始化initlcd12864();//液晶显示模块初始化printf("\n OK \n"); //初始化结束串口打印OK信息while(1){a=Sonic1();b=Sonic2();c=Sonic3();d=Sonic4();if(a<=100) hanzi(0,0,"1号车位无车");else hanzi(0,0,"1号车位有车");if(b<=100) hanzi(0,0,"2号车位无车");else hanzi(0,0,"2号车位有车");if(c<=100) hanzi(0,0,"3号车位无车");else hanzi(0,0,"3号车位有车");if(d<=100) hanzi(0,0,"4号车位无车");else hanzi(0,0,"4号车位有车");delayms(100);}}。
基于单片机的停车场智能控制系统的设计
停车场智能控制系统是一种运用计算机技术、自动控制技术和
现代通信技术相结合的系统,它主要通过单片机和传感器等硬件设
备来实现车位监测、计费、实时显示等功能。
以下是基于单片机的
停车场智能控制系统的设计方案:
1. 硬件选型:根据停车场的具体情况,选择合适的单片机、显
示器、传感器、计费装置、通信模块等硬件设备。
一般情况下,可
以选择51单片机或者STM32单片机,并选择合适的传感器进行车位
的监测和计费等操作。
2. 车位监测:使用压力传感器等设备检测车辆进入和离开车位
的状态,判断车位是否空闲,并将监测结果传输到中控器。
3. 数据采集:采集车辆的进入时间和离开时间,根据停车时长
计算停车费用。
4. 费用计算:计算车辆停放时间,并根据规定的收费标准进行
计费,将计费结果存入数据库或传输到中控器。
5. 中心控制:使用中控器实现车位监测、计费、显示等功能,
同时对外传输与操作系统中的管理模块进行数据的交互。
6. 广告宣传:在停车场大屏幕上播放广告宣传,增加停车场的
知名度和收益。
7. 数据接口:与其他系统相互接口,包括管理系统和车牌识别
系统等,实现数据共享和互通。
8. 网络安全:为保障数据和信息的安全,设置系统的访问权限,并针对系统的入侵和攻击等问题,进行安全防范和应对措施。
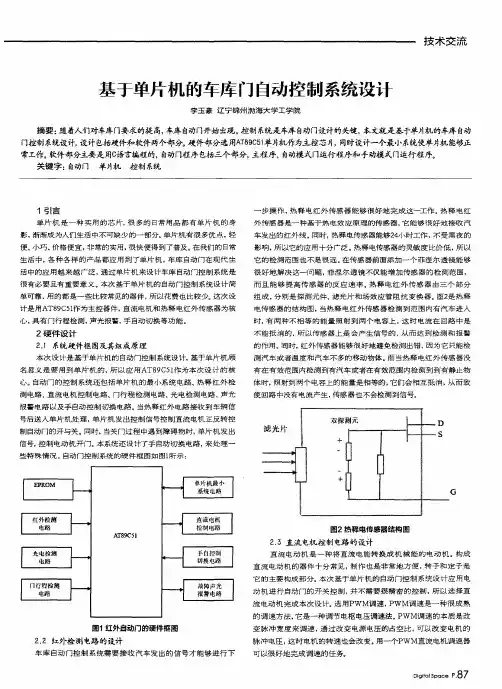
基于MCS-51单片机车库卷帘门自动控制的设计与实现【摘要】本次设计方案以控制芯片AT89S51作为整个系统的控制中心,步进电机驱动芯片ULN2003A为驱动器,结合两个按钮来控制步进电机的正转、反转和制动,从而实现车库卷帘门的上升、下降及停止功能;同时,采用三种颜色的LED来分别显示车库卷帘门自动控制的三种状态。
系统硬件设计利用Protel99 SE工具来实现;软件设计基于Keil C51+Proteus开发环境,对指令代码进行编译﹑检查和调试并生成(.HEX)文件载入单片机中进行仿真模拟,保障系统功能的正确实施。
除此之外,结构简单、成本低廉、计数准确的设计系统具备功能扩展的优越性,与此同时,为后续的二次研发奠定了基础。
【关键词】AT89S51;ULN2003A;步进电机;C51语言51 MICROCONTROLLER INFRARED AUTOMATICSENSOR SHUTTER DOORS【Abstract】The design scheme based on MCU AT89S51 as the control chip,the motor drive chip ULN2003A,forward,and reversal by two buttons to control the stepper motor to stop,so as to realize the rise,garage door down and stop function; in addition,using three color LED to respectively display three kinds of state automatic garage rolling shutter door.Procedures for the use of C51 language,Protel99 SE circuit design,Keil C software compiler generation (.HEX) file and simulation by Proteus.In addition,this system also has the characteristics of simple structure,low cost,accurate counting,but also has the function of the expansion of the function,provides the basis for the later twoProvidesbasic research【Keywords: hotel】AT89S51;ULN2003A;Stepping motor; C51 language目录第一章绪论 (3)设计背景 (3)设计内容 (4)设计意义 (5)第二章方案设计及技术基础 (6)设计方案 (6)MCS-51单片机及开发环境介绍 (7)开发环境介绍 (14)主要芯片元器件及功能介绍 (15)电机驱动芯片 (15)步进电机结构及工作原理 (17)第三章硬体设计 (19)电源设计 (20)单片机复位电路 (21)单片机时钟系统 (23)电机驱动电路 (24)按键控制电路 (26)状态显示电路 (27)第四章单片机软体设计 (29)系统程序框图 (29)电机控制程序 (31)致谢 (33)附录A 元件清单 (34)附录B 设计原理图 (35)附录C 源程序 (36)第一章绪论设计背景步入21世纪,门的安全理念显得更加重要,主要体现在实施的有效性(防范、通行、疏散的有效性),此外还特别加强了建筑美感,使得门与建筑、环境达到前所未有的协调、和谐。
基于单片机的停车场出入控制电路的设计与实现基于单片机的停车场出入控制电路的设计与实现摘要停车场出入控制器系统是基于单片机的一种智能制造系统,通过与外界的接口,连接泊车场的门口和停车管理中心,实现对停车场的远程控制。
本文利用PIC16F877A单片机,设计基于单片机的停车场出入控制电路,实现对停车场出入口的自动控制。
首先,分析了停车场管理系统的传统设计,探讨出发的智能化控制方案;然后,设计了单片机控制电路,其中包括单片机系统主控电路,控制板,编码器,按键,LED灯,电磁锁,驱动电路,模拟输入输出电路等;最后,实现停车场出入控制系统,完成对系统的多种测试,并获得良好的控制效果。
关键词:单片机;控制电路;PIC16F877A;停车场;出入控制 1 绪论停车场作为城市基础设施之一,为城市居民提供便捷的泊车服务。
随着城市车辆的不断增加,停车场的安全及快捷操作越发显得重要,其中出入口的控制占有非常重要的地位[1]。
传统的停车场控制系统是以硬件实现的,整个系统的面积大,功耗大,复杂度高,管理不便,往往采取统一维护的方式,远程控制存在着一定的不便,不能实现实时的自动控制,性能处于相对落后的状态。
基于单片机的停车场出入控制系统可以有效替代传统的停车场控制系统,使系统控制更加省电、紧凑,更便于控制和管理,可以有效提高系统的安全性,方便远程控制,提高停车场的服务水平。
本文以PIC16F877A单片机为核心,结合泊车场的具体实际,设计了基于单片机的停车场出入控制系统,并实现了系统的测试和调试,获得了良好的控制效果。
2 停车场控制方案2.1 停车场控制系统介绍停车场控制系统的设计主要是针对大型泊车场,其安全及控制性能要求较高,要在极短的时间内,对每一辆车以及停车场车位的情况进行数据收集,对各种不同的停车场运行模式实现自动控制,以实现智能化的停车场管理。
2.2 系统需求根据停车场的实际需求,本文设计的停车场出入控制系统应包括如下功能:(1) 能够自动完成停车场内的控制,记录车辆的入口及出口状态,统计出入的车辆信息,并根据设定的规则进行自动收费。
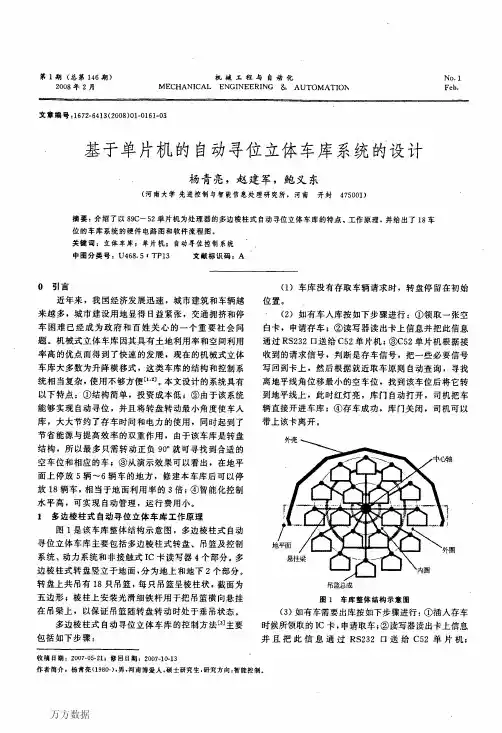
目录摘要 (3)英文摘要 (3)第1章引言 (4)1.1选题背景 (4)1.2研究意义 (4)1.3本设计的主要特色 (4)第2章汽车入库门控装置的设计方案 (5)2.1 总体设计方案选择 (5)2.2 各模块方案的选择与论证 (6)2.2.1电机模块的选择与论证 (6)2.2.2电机驱动模块方案的选择与论证 (6)2.2.3避障模块方案的选择与论证 (7)2.2.4光源检测方案的选择与论证 (7)2.2.5.电源模块方案的选择与论证: (8)第3章相关硬件资料介绍 (9)3.1单片机AT89C51简介 (9)3.2单片机AT89C2051简介 (11)第四章汽车入库门控装置的硬件设计 (13)4.1系统硬件的基本组成部分 (13)4.2 主要单元电路的设计 (14)4.2.1小车电机驱动电路 (14)4.2.2拦栅电机控制电路 (15)4.2.3避障模块 (16)4.2.4光源检测模块 (18)4.2.5电源供电模块 (18)4.2.6最小系统 (19)第五章汽车入库门控装置的软件设计 (21)5.1 单片机的选择 (21)5.2 软件设计流程框图 (21)第六章系统调试与分析 (22)6.1 使用的仪器仪表 (22)6.2系统调试 (22)6.2.1 系统总体调试及分析 (22)6.2.2各个模块电路调试及分析 (22)6.2.2.1小车直流电机驱动模块: (22)6.2.2.2趋光模块 (23)6.2.2.3拦栅控制模块 (23)第七章总结 (24)参考文献 (24)汽车入库门控装置摘要:设计利用AT89C51控制为核心、利用红外传感器寻库,光线为引导。
其功能有自动寻找车库,避障,在汽车到达车库门前时,自动打开车库门,报警等功能。
汽车主要由两个直流电机控制左右车轮,用PWM波分别控制电机转动速度,实现左转、右转和前进。
用各种传感器采集信号,经单片机处理后,完成各种功能。
其中利用光敏三极管对光源进行检测,引导汽车到达车库门口;通过检测障碍,发射开门信号,启动电机开启车库门,汽车停止运动,等待车库门完全开启,再利用接近开关判断汽车是否到达库。
基于单片机的自动车库门系统设计随着科学技术的发展,全国拥有汽车的家庭越来越多,自动门已被人们广泛的用于自家家用的车库上。
由于单片机具有集成度高,可靠性高,功能强,体积小,功耗低,价格低廉的优点,所以本次设计采用STC89C52单片机作为主要控制模块。
本文主要采用单片机和无线遥感控制的方法,运用PT2262/PT2272编解码集成电路配接433MHZ无线收发模块来实现对无线信号的编码发射和解码接收,单片机通过对解码芯片所传递信号的识别,来控制车库门的自动开启和车库内部的照明系统。
标签:STC89C52芯片;PT2262/PT2272编解码芯片;433M无线模块根据公安部交通管理局的统计数据显示,我国汽车的拥有量占据全球汽车总数的第二位,拥有量的快速增长对车位的停泊提出了新的刚性需求。
各大城市高峰时塞车随处可见,家用汽车的停放也逐渐成为一个亟待解决的社会问题;由于单片机的控制功能强、等一系列优点,早已渗透到我们日常生活中的各个领域。
1、系统总体设计1.1 系统设计要求本文要求设计一款基于单片机的自动车库门系统,以解决现在停车难,停车需要繁琐手工劳动的问题,具体要求如下:(1)调查当前车库门采用的自动控制系统类别;(2)完成基于单片机的自动车库门系统的硬件设计;(3)完成基于单片机的自动车库门系统的软件设计,并进行调试;(4)车库门采用无线遥控方式开启/关闭车库门,也可通过键盘密码输入方式开启/关闭车库门。
1.2 系统结构方框图本电路结构框图由编码芯片PT2262,433M无线发射模块,433M无线接收模块,解码芯片PT2272,STC89C52芯片,电机控制、照明电路和蜂鸣器报警等六个部分组成,电路结构框图如图1所示。
2、系统硬件设计2.1 单片机最小系统设计单片机最小系统,是指用最少的元件能使单片机工作起来的一个最基本的组成电路[1]。
一般应该包括:电源、復位电路、晶振电路等。
电源为单片机工作供应动力。
单片机课程设计题目:基于单片机自动车库门的设计学院:姓名:学号专业:电子信息科学与技术年级:指导老师:摘要:本设计主要利用单片机控制车库门的自动开启与关闭。
系统采用80C51单片机。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
具体设计如下所述。
关键词:80C51单片机限位开关Abtrac: input to a single chip microcomputer to within the data processing, on through the parallel port P1 output, control the action of automatic door, when performing garage door into instructions after 5 S automatic door began to move forward, to move forward until contact limit switches, the garage doorto stop. When performing garage door back instructions after 5 S, garage door back after contact sports to limit switches is to stop the control circuit is simple, practical, good reliability. The specific design as described below.Keyword:80 C51 limit switch目录:(一)引言(二)设计任务(三)项目原理(1)单片机并行口的分配(2)项目线路连接(四)项目参考程序(1)项目程序流图(2)项目参考程序(五)总结参考文献谢词一、引言:随着经济的发达,拥有车的人越来越多,对好的车库门的需求也不断增大,本文是对车库门的机械和控制系统的具体设计说明沿用了单片机对电动机的控制的方法。
摘要本设计主要利用单片机控制车库门的自动开启与关闭。
系统采用80C51单片机和L298N驱动芯片。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
具体设计如下所述。
关键词:80C51单片机 L298N驱动芯片限位开关目录一. 实验目的和内容 (2)二. 系统总体设计 (2)1 总电路图 (2)2单片机 (3)2.1单片机的概述以及应用 (3)2.2 MCS51单片机的内部结构 (4)2.3 单片机的引脚分配 (5)3 L298N驱动芯片 (10)4单片机并行口分配 (13)5功能流图 (13)三. 实验结果和分析 (14)四.总结与体会 (19)五. 参考文献 (22)六.附录 (23)一实验目的和内容本设计主要利用单片机控制车库门的自动开启与关闭。
系统采用80C51单片机和L298N驱动芯片。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
具体设计如下所述。
二系统总体设计1 总电路图2单片机2.1单片机的概述以及应用单片机全称单片微型计算机(Single Chip Microcomputer),简写MCU微型控制器。
它专为工业控制、测量而设计,具有集成度高、可靠性高、性价比高的三高优势,体积小、功能全的特点,主要应用于计算机外设、智能仪器仪表、家用电器、工业检测与控制、通信设备等,嵌入式工程师能够根据应用对象的需求,选择合适的单片机,进行各种系统设计以及程序设计,系统按照程序指令完成规定工作。
单片机课程设计
题目:基于单片机自动车库门的设计
学院:
姓名:
学号
专业:电子信息科学与技术
年级:
指导老师:
摘要:本设计主要利用单片机控制车库门的自动开启与关闭。
系统采用80C51单片机。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S 后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
具体设计如下所述。
关键词:80C51单片机限位开关
Abtrac: input to a single chip microcomputer to within the data processing, on through the parallel port P1 output, control the action of automatic door, when performing garage door into instructions after 5 S automatic door began to move forward, to move forward until contact limit switches, the garage door to stop. When performing
garage door back instructions after 5 S, garage door back after contact sports to limit switches is to stop the control circuit is simple, practical, good reliability. The specific design as described below.
Keyword:80 C51 limit switch
目录:(一)引言
(二)设计任务
(三)项目原理
(1)单片机并行口的分配
(2)项目线路连接
(四)项目参考程序
(1)项目程序流图
(2)项目参考程序
(五)总结参考文献谢词
一、引言:随着经济的发达,拥有车的人越来越多,对好的
车库门的需求也不断增大,本文是对车库门的机械和控
制系统的具体设计说明沿用了单片机对电动机的控制的
方法。
二、设计任务:利用主控芯片80C51来控制车库门的开启和
关闭。
三、项目原理
系统采用80C51单片机。
自动门的控制按钮信号通过单片机并行接口P3输入到单片机内进行数据处理,在通过并行口P1输出,控制自动门的动作,当执行车库门前进指令5S后自动门开始前进,直到接触到前进限位开关时,车库门停止前进。
当执行车库门后退指令5S后,车库门向后运动到接触后限位开关是停止其控制电路简单、实用、可靠性好。
(1)单片机并行口的分配
(2)项目线路连接
四、项目参考程序
(1)项目程序流程图
(2)项目参考程序
项目参数程序如下
; 输入输出引脚定义
;输出
Y1 BIT P1.0 ;关门主接触器
Y2 BIT P1.0 ;开门主接触器
Y3 BIT P1.0 ;信号灯光
;输入
CPL Y3
SB1 BITP3.0 ;关门开关SB2 BITP3.1 ;开门开关SQ1 BITP3.4 ;关门限位SQ2 BITP3.5 ;开门限位
;中断标志进位定义
STOP BIT 00H ;外部中断0、P3.2引脚接停止开关
SA VE BIT 01H ;外部中断1、P3.3引脚接安全压力挡板
ORG 000H
AJMP MAIN
ORG 0003H
CLR EX0
SETB STOP ;外部中断0、置位停止开关
RETI
ORG 0013H
CLR EX1
SETB SA VE ;外部中断1、置位安全压力挡板
RETI
主程序
MAIN: MOV P1 ,#001H ;初始化MOV P3,#00H
CLR STOP
CLR SA VE
SETB EA
SETB EX0 ;允许外部中断0、P3.2引脚接停止开关中断
SETB EX1 ;允许外
部中断0、P3.2引脚接停止开关中断
SETB PX1 ;安全压力挡板中断级别高
MAIN1: JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SB1,CLOSE ;是否关门
JB SB2 OPEN ;是否开门
AJMP MAIN1
;停止
STOP1: SETB EX0
CLR STOP ;若停止开,关,清标志位
CLR Y1 ;停关门
CLR Y2 ;停开门
CLR Y3 ;停闪烁
AJMP MAIN1
;安全挡板
SA VE: SETB EX1
CLR SA VE ;若安全挡板,清标志位
CLR Y1 ;停关门
CLR Y 3 ;停闪烁
AJMP MAIN1
;关门
CLOSE:SETB Y3 ;置闪烁标志
MOV R2,#10 ;10次CLOSE:ACALL DEL500 ;延时500毫秒
JB STOP,STOP1 ;是否停止开关
JB SA VE,SVE1 ;是否安全挡板
CPL Y3
DJNZ R2,CLOSE
SETB Y1 ;启动开门
CLR Y2 ;关闭开门CLOSE2:JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SQ1, STOP1 ;是否限位
ACALL DEL500 ;闪烁
CPL Y
AJMP CLOSE2
;开门
OPEN: SETB Y3 ;置闪烁标志MOV R2,#10H ;10次OPEN1: ACALL DEL500 ;延时500毫秒
JB STOP ,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
CPL Y3
DJNZ R2,OPEN1
SETB Y2 ;启动开门
CLR Y1 ;关闭开门OPEN2: :JB STOP,STOP1 ;是否停止开关
JB SA VE,SA VE1 ;是否安全挡板
JB SQ2, STOP1 ;是否限位
ACALL DEL500 ;闪烁
CPL Y3
AJMP OPEN2
;延时500s程序
ORG 0030H
DEL500:MOV R3 #5
LOOP3: MOV R5,#100
LOOP1:MOV R6,#250
LOOP2: DJNZ R2,LOOP2
DJNZ R1,LOOP1
DJNZ R3,LOOP3
RET
END
(五)总结参考文献谢词
总结:论文题目选定后,……..
参考文献:[1]刘南平孙惠斤童帆苏梅编著【单片机实训与开发教程】科学出版社
[2]杨光友朱宏辉杨光祥张锋编著【单片微型计算机原理及接口技术】中国水利电力出版社
[3]兰吉昌编著【51单片机应用设计百例】化学工业出版社
[4]胡汉才【编著单片机原理及接口技术】(第三版)清
华啊出版社
[5]李群芳肖看编著【单片机原理接口应用—嵌入式系统技术基础】清华大学出版社
[6]申凤琴主编【电工电子技术基础】机械工业出版社
[7]孙津平主编【数字电子技术】西安电子科技大学出版社
孙蕙莖编著【单片机设计项目设计程序】电子工业出版社
谢词:。