4.常用坐标系(4学时)
- 格式:ppt
- 大小:4.78 MB
- 文档页数:54
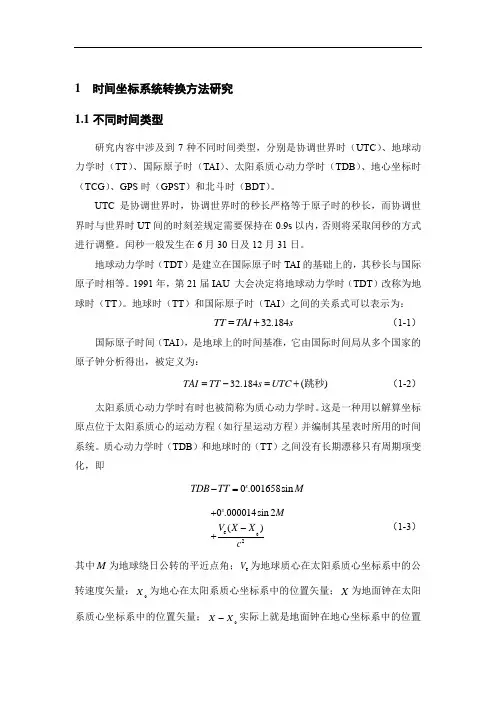
1 时间坐标系统转换方法研究1.1 不同时间类型研究内容中涉及到7种不同时间类型,分别是协调世界时(UTC )、地球动力学时(TT )、国际原子时(TAI )、太阳系质心动力学时(TDB )、地心坐标时(TCG )、GPS 时(GPST )和北斗时(BDT )。
UTC 是协调世界时,协调世界时的秒长严格等于原子时的秒长,而协调世界时与世界时UT 间的时刻差规定需要保持在0.9s 以内,否则将采取闰秒的方式进行调整。
闰秒一般发生在6月30日及12月31日。
地球动力学时(TDT )是建立在国际原子时TAI 的基础上的,其秒长与国际原子时相等。
1991年,第21届IAU 大会决定将地球动力学时(TDT )改称为地球时(TT )。
地球时(TT )和国际原子时(TAI )之间的关系式可以表示为:32.184TT TAI s =+ (1-1)国际原子时间(TAI ),是地球上的时间基准,它由国际时间局从多个国家的原子钟分析得出,被定义为:32.184()TAI TT s UTC =-=+跳秒 (1-2)太阳系质心动力学时有时也被简称为质心动力学时。
这是一种用以解算坐标原点位于太阳系质心的运动方程(如行星运动方程)并编制其星表时所用的时间系统。
质心动力学时(TDB )和地球时的(TT )之间没有长期漂移只有周期项变化,即0.001658sin s TDB TT M -=0e 20.000014sin 2()s MV X X c +-+ (1-3)其中M 为地球绕日公转的平近点角;e V 为地球质心在太阳系质心坐标系中的公转速度矢量;0X 为地心在太阳系质心坐标系中的位置矢量;X 为地面钟在太阳系质心坐标系中的位置矢量;0X X -实际上就是地面钟在地心坐标系中的位置矢量;c 为真空中的光速。
地心坐标时(TCG )是原点位于地心的天球坐标系中所使用的第四维坐标—时间坐标,用于讨论绕地球运行的卫星等天体的运动规律、编制相应的星历。
《工程制图与CAD》课程标准课程编码:35003102 课程类别:专业基础课程学分:4 学时:64适用专业:安全技术与管理、职业卫生技术与管理授课院部:课程负责人:完成人:审核人:一、课程信息安全系统工程课程的相关信息如表1所示。
二、课程标准开发团队课程标准开发团队的相关人员构成如表2所示。
三、课程性质和功能定位(一)课程性质《工程制图与CAD》是学习安全技术与管理、职业健康安全技术等专业学生的一门基础必修课,为理实一体化课程。
课程实质是要教会学生从如何识图、读图到不仅会画图,还能够在掌握相关制图规范的基础上,灵活运用、自主思考,能独立运用AUtOCAD软件完成设计项目施工图的制图设计任务。
主要培养学生应用工程制图的相关国家规范,以CAD为主的软件实操。
只有在掌握了制图规范的基础上,学习如何运用CAD软件进行设计项目的施工图绘制,本课程在教给学生普遍规律与软件实操技能的同时,还为学生指出了一个新的就业方向。
比如,施工图设计师这一职业,已经在行业分工越来越细化的今天,在设计行业中形成一种独立的职业,而工程制图这门课程正是从事施工图设计师这一职业的敲门砖。
与此同时,课程也将为学生以后从事建筑、室内设计行业的相关工作奠定理论基础。
(二)课程功能定位课程的功能定位如表3所示。
四、课程目标(一)课程总目标通过课程的学习,使学生掌握工程制图规范,并能结合到以CAD为主的软件实操中,独立完成设计项目的施工图制作。
从而可以使学生应达到如下总体目标:(1)绝大都数能够理解工程制图的基础知识、熟练使用AUtOCAD软件绘制图纸,为最终成为室内设计师、施工图设计师,奠定良好的理论基础,让学生具备室内设计师工程制图的能力。
(2)启发学生形成一种独立的学习方法,通过AUtoCAD软件学习体会,举一反三,自主比较、总结、归纳同类软件的学习方法,培养尖子生自主总结规律与共性、理论联系实际、独立分析思考的自主学习能力。
(二)课程具体目标与要求课程教学具体目标与内容的描述如表4所示。

高中物理新课标必修1课时分配建议第1单元 1 质点参考系和坐标系(1学时)2 时间和位移(2学时)第2单元 3 运动快慢的描述速度(2学时)4 实验:练习使用打点计时器(2学时)5 速度改变快慢的描述加速度(2学时)1 质点参考系和坐标系(1)教材分析要描述物体的运动,首先要对实际物体建立一个物理模型,最简单的是质点模型。
由于运动的相对性,描述质点的运动时必须明确所选择的参考系。
为了准确地、定量地描述质点的运动,还要建立坐标系。
质点、参考系和坐标系是描述物体运动的基础知识,教材逐步展开这些内容,最后介绍全球卫星定位系统。
本节知识是学习后面内容的基础,也是整个力学的基础。
(2)质点的教学质点模型是高中物理提出的第一个理想模型。
我们对质点概念的形成,以及质点模型的建立过程,其教学要求是初步的。
学生对科学思维方法也只能是有所认识,要求不能太高。
教科书对质点模型建立的思维过程有以下考虑:①物理概念、规律是对一定的物理模型来说的,物理模型的建立过程体现了科学思维方法。
②质点概念固然重要,但更重要的是引导学生领悟质点概念的提出和分析、建立质点模型的过程;为此,教材通过实例说明要准确描述物体的运动是十分困难的,分析困难的原因,并逐步指出建立质点概念的必要性,充分展示了物理学研究的科学思维过程,让学生体验什么是科学思维的方法。
教学中要进一步为学生创设问题情景。
如放映录像:鸟的飞行,流水、瀑布,羽毛下落……·详细描述物体运动有什么困难?·我们需要了解物体各部分运动的区别吗?·演示羽毛下落。
·教师引导学生讨论并总结质点概念。
要明确质点概念的确切内容和在什么情况下可把物体看做质点。
同时,要明确建立物理模型是物理学研究问题的基本方法。
(3)参考系和坐标系的教学①学生在初中已学过参照物,教师可让学生举例说明同一物体对不同的参照物运动情况不同,对学生列举的典型例子教师应充分肯定,同时结合教科书中的图1.1-4加以分析。
《理论力学》课程教学大纲课程名称:理论力学课程类别:专业必修课适用专业:物理学考核方式:考试总学时、学分:56 学时 3.5 学分其中实验学时:0 学时一、课程性质、教学目标《理论力学》是物理专业学生的专业主干课,它的基本概念、理论和方法,具有较强的逻辑性、抽象性和广泛的实用性,通过本课程的学习,使学生掌握理论力学的基本概念、基本理论、基本规律,并能应用这些知识解决具体问题。
该课程主要包括质点运动的基本定理、有心运动和两体问题、一般质点组动力学问题、特殊质点组-刚体的动力学问题以及分析力学初步。
是学习量子力学,电动力学等专业课程的重要基础。
其具体的课程教学目标为:课程教学目标1:使学生对宏观机械运动的规律有一较全面较系统的认识,能掌握处理力学问题的一般方法,为后继理论物理课程的学习打坚实基础。
并培养一定的抽象思维与严密的逻辑推理能力,为今后独立钻研创造条件。
课程教学目标2:在深入掌握力学理论的基础上,有能力居高临下、深入浅出和透彻地分析中学力学教材。
同时,可以初步分析一些生产、生活中的力学问题,提高作为中学物理教师的业务能力。
课程教学目标3:在力学理论的学习中结合运用数学工具处理问题,使学生认识数学与物理的密切关系,培养学生运用数学工具解决物理问题的能力。
课程教学目标与毕业要求对应的矩阵关系注:以关联度标识,课程与某个毕业要求的关联度可根据该课程对相应毕业要求的支撑强度来定性估计,H表示关联度高;M表示关联度中;L表示关联度低。
二、课程教学要求本课程前五章也称为牛顿力学,牛顿力学是以质点力学为基础,进而讨论质点组力学,刚体力学,在质点力学中又是以牛顿运动三定律为基础建立起质点力学的理论。
最后一章是分析力学,学习分析力学的理论一定要有牛顿力学的扎实基础,在分析力学中是以虚功原理和达朗伯原理为基础建立起力学系统在广义坐标下的运动方程的积分理论。
三、先修课程力学、高等数学四、课程教学重、难点重点:物体的受力分析;力学体系的平衡方程;点的运动的合成;动力学普遍定理的综合应用;利用虚功原理,达朗贝尔原理求解力学体系的平衡和动力学问题。
1 时间坐标系统转换方法研究1.1 不同时间类型研究内容中涉及到7种不同时间类型,分别是协调世界时(UTC )、地球动力学时(TT )、国际原子时(TAI )、太阳系质心动力学时(TDB )、地心坐标时(TCG )、GPS 时(GPST )和北斗时(BDT )。
UTC 是协调世界时,协调世界时的秒长严格等于原子时的秒长,而协调世界时与世界时UT 间的时刻差规定需要保持在0.9s 以内,否则将采取闰秒的方式进行调整。
闰秒一般发生在6月30日及12月31日。
地球动力学时(TDT )是建立在国际原子时TAI 的基础上的,其秒长与国际原子时相等。
1991年,第21届IAU 大会决定将地球动力学时(TDT )改称为地球时(TT )。
地球时(TT )和国际原子时(TAI )之间的关系式可以表示为:32.184TT TAI s =+ (1-1)国际原子时间(TAI ),是地球上的时间基准,它由国际时间局从多个国家的原子钟分析得出,被定义为:32.184()TAI TT s UTC =-=+跳秒 (1-2)太阳系质心动力学时有时也被简称为质心动力学时。
这是一种用以解算坐标原点位于太阳系质心的运动方程(如行星运动方程)并编制其星表时所用的时间系统。
质心动力学时(TDB )和地球时的(TT )之间没有长期漂移只有周期项变化,即0.001658sin s TDB TT M -=0e 20.000014sin 2()s MV X X c +-+ (1-3)其中M 为地球绕日公转的平近点角;e V 为地球质心在太阳系质心坐标系中的公转速度矢量;0X 为地心在太阳系质心坐标系中的位置矢量;X 为地面钟在太阳系质心坐标系中的位置矢量;0X X -实际上就是地面钟在地心坐标系中的位置矢量;c 为真空中的光速。
地心坐标时(TCG )是原点位于地心的天球坐标系中所使用的第四维坐标—时间坐标,用于讨论绕地球运行的卫星等天体的运动规律、编制相应的星历。
高中物理新课标必修1课时分配建议第1单元 1 质点参考系和坐标系(1学时)2 时间和位移(2学时)第2单元 3 运动快慢的描述速度(2学时)4 实验:练习使用打点计时器(2学时)5 速度改变快慢的描述加速度(2学时)1 质点参考系和坐标系(1)教材分析要描述物体的运动,首先要对实际物体建立一个物理模型,最简单的是质点模型。
由于运动的相对性,描述质点的运动时必须明确所选择的参考系。
为了准确地、定量地描述质点的运动,还要建立坐标系。
质点、参考系和坐标系是描述物体运动的基础知识,教材逐步展开这些内容,最后介绍全球卫星定位系统。
本节知识是学习后面内容的基础,也是整个力学的基础。
(2)质点的教学质点模型是高中物理提出的第一个理想模型。
我们对质点概念的形成,以及质点模型的建立过程,其教学要求是初步的。
学生对科学思维方法也只能是有所认识,要求不能太高。
教科书对质点模型建立的思维过程有以下考虑:①物理概念、规律是对一定的物理模型来说的,物理模型的建立过程体现了科学思维方法。
②质点概念固然重要,但更重要的是引导学生领悟质点概念的提出和分析、建立质点模型的过程;为此,教材通过实例说明要准确描述物体的运动是十分困难的,分析困难的原因,并逐步指出建立质点概念的必要性,充分展示了物理学研究的科学思维过程,让学生体验什么是科学思维的方法。
教学中要进一步为学生创设问题情景。
如放映录像:鸟的飞行,流水、瀑布,羽毛下落……·详细描述物体运动有什么困难·我们需要了解物体各部分运动的区别吗·演示羽毛下落。
·教师引导学生讨论并总结质点概念。
要明确质点概念的确切内容和在什么情况下可把物体看做质点。
同时,要明确建立物理模型是物理学研究问题的基本方法。
(3)参考系和坐标系的教学①学生在初中已学过参照物,教师可让学生举例说明同一物体对不同的参照物运动情况不同,对学生列举的典型例子教师应充分肯定,同时结合教科书中的图1.1-4加以分析。
《数控加工技术》课程教学大纲学时:64学分:4适用专业及学制:三年制高职机械制造及自动化专业模具设计与制造全日制编制:数控教研室审定:数控技术专业建设指导委员会批准日期:2020一、制定依据本课程是机械制造及自动化专业的专业必修课程。
本大纲依据《数控加工岗位职业标准》和《数控技术应用专业人才培养质量标准》而制定。
二、课程教学目标1.熟悉数控机床的性能,功用,基本组成和工作过程,掌握数控机床的控制方式和分类方法;2.熟悉数控机床的运动与坐标系的确定方法,掌握机床坐标系和工件坐标系的意义;3. 掌握常用准备功能指令、辅助功能指令,能编写较复杂程度零件的数控加工程序;4.熟悉数控车床的基本结构、加工特点、编程特点,掌握数控车削编程的基本指令,会根据要求编制简单的回转体零件的加工程序;5. 熟悉数控铣床(加工中心)的基本结构、加工特点、编程特点,掌握数控铣削编程的基本指令,会根据要求编制铣面、铣轮廓等简单的加工程序;6.能阅读和理解零件数控加工程序,并能利用一定的数控加工仿真软件,编辑、调试零件数控加工程序;7. 能根据零件图样要求,数控加工工艺过程及工序内容,按指定的数控系统编程指令与格式编制数控加工程序,形成程序清单;8. 能熟练操控常用的典型数控设备,并能根据数控加工工艺方案和程序清单实现零件的数控加工,完成零件的几何量检测与质量分析,填写检测报告。
三、课程教学单元及学时安排四、课程教学设计1.整体教学设计知识基础:本课程遵循学生职业能力培养的基本规律,基于典型工作任务及其工作过程集结知识内容、设计了3个学习情境,完成《数控技术应用》课程的学习。
以数控车削加工设备,数控镗铣加工设备,数控电火花加工设备及典型零件为载体,完成设备功能,结构,控制及应用等知识的传授,每个学情境就是一个工作任务,教、学、做有机融合,把理论学习和实践训练贯穿始终。
2.单元教学设计学习情境1:数控机床加工程序编制基础10学时1、数控设备概述 2学时数控设备的基本概念,数控设备基本组成,数控设备的工作原理和特点,数控设备的分类,数控设备的主要性能指标;数控设备在国民经济中的地位和作用,数控设备的现状和发展。
《工业机器人原理与操作》教学大纲一、课程的性质、地位与任务《工业机器人原理与操作》是本专业核心课,它是培养学生具有机器人设计和使用的能力,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
二、教学基本要求基本理解机器人的一般特征,坐标系统、位置运动学、速度运动学和动力学等。
具备机器人世界坐标系统和手坐标系统的转化,根据位置运动学、速度运动学、动力学及自动控制理论的相关知识解决问题的能力。
具体要求学生做到:1.掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2.掌握工业机器人整体性能、主要部件性能的分析方法;3.掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4.了解工业机器人的新理论,新方法及发展趋向。
四、教学内容与学时安排任务一概论……4学时本章教学目的和要求:了解工业机器人的发展事由和历程,机器人的定义。
教学重点:介绍工业机器人的产生和发展过程,掌握机器人的概念、熟悉工业机器人的常见分类及其行业应用。
教学难点:工业机器人的常见分类及其行业应用任务主要内容(理论):第一节什么是工业机器人第二节为什么发展工业机器人第三节机器人的发展概况一、工业机器人的诞生二、工业机器人的发展现状和趋势第四节工业机器人的分类及应用一、工业机器人的分类二、工业机器人的应用任务二机器人的结构设计……16学时本章教学目的和要求:1.了解相关的参数含义及设置2.掌握机器人的基本结构组成3.了解机器人设计的基本原理,基本方法教学重点:机器人的基本结构组成,关节、自由度等概念。
教学难点:机器人关节、自由度的概念任务主要内容(理论):第一节机器人的基本组成及技术参数(4学时)一、机器人的基本组成二、机器人的技术参数第二节机器人总体设计(4学时)一、零部件的初认识二、机械臂设计工艺三、机械臂的装配任务主要内容(实训):的三维实体零件,并完成零件的组装。