第一章三种常用的坐标系
- 格式:ppt
- 大小:305.50 KB
- 文档页数:8

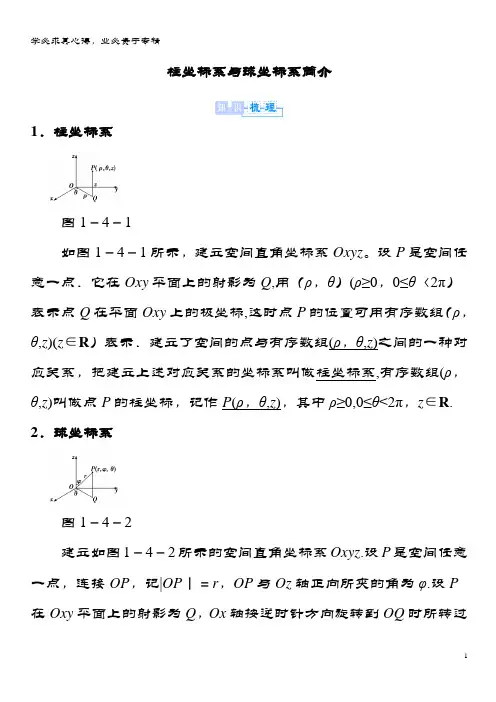
柱坐标系与球坐标系简介1.柱坐标系图1-4-1如图1-4-1所示,建立空间直角坐标系Oxyz。
设P是空间任意一点.它在Oxy平面上的射影为Q,用(ρ,θ)(ρ≥0,0≤θ〈2π)表示点Q在平面Oxy上的极坐标,这时点P的位置可用有序数组(ρ,θ,z)(z∈R)表示.建立了空间的点与有序数组(ρ,θ,z)之间的一种对应关系,把建立上述对应关系的坐标系叫做柱坐标系,有序数组(ρ,θ,z)叫做点P的柱坐标,记作P(ρ,θ,z),其中ρ≥0,0≤θ<2π,z∈R. 2.球坐标系图1-4-2建立如图1-4-2所示的空间直角坐标系Oxyz.设P是空间任意一点,连接OP,记|OP|=r,OP与Oz轴正向所夹的角为φ.设P 在Oxy平面上的射影为Q,Ox轴按逆时针方向旋转到OQ时所转过的最小正角为θ。
这样点P的位置就可以用有序数组(r,φ,θ)表示.这样,空间的点与(r,φ,θ)之间建立了一种对应关系.把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系).有序数组(r,φ,θ)叫做点P的球坐标,记做P(r,φ,θ),其中r≥0,0≤φ≤π,0≤θ<2π).3.空间直角坐标与柱坐标的转化空间点P(x,y,z)与柱坐标(ρ,θ,z)之间的变换公式为错误!错误! 4.空间直角坐标与球坐标的关系空间点P(x,y,z)与球坐标(r,φ,θ)之间的变换公式为错误!错误!1.要刻画空间一点的位置,就距离和角的个数来说有什么限制?【提示】空间点的坐标都是三个数值,其中至少有一个是距离.2.在柱坐标系中,方程ρ=1表示空间中的什么曲面?在球坐标系中,方程r=1分别表示空间中的什么曲面?【提示】ρ=1表示以z轴为中心,以1为半径的圆柱面;球坐标系中,方程r=1表示球心在原点的单位球面.3.空间直角坐标系、柱坐标系和球坐标系的联系和区别有哪些?【提示】(1)柱坐标系和球坐标系都是以空间直角坐标系为背景,柱坐标系中一点在平面xOy内的坐标是极坐标,竖坐标和空间直角坐标系的竖坐标相同;球坐标系中,则以一点到原点的距离和两个角刻画点的位置.(2)空间直角坐标系、柱坐标系和球坐标系都是空间坐标系,空间点的坐标都是三个数值的有序数组.。
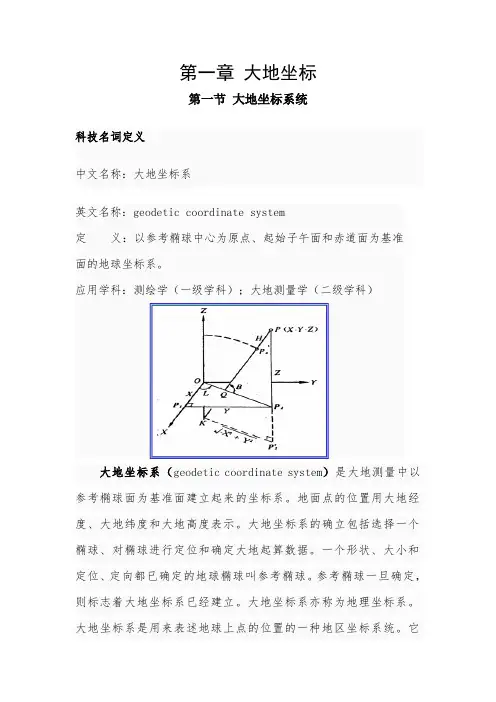
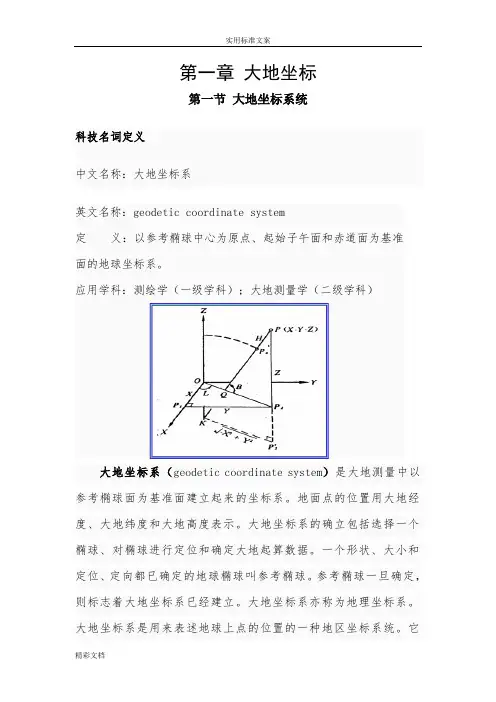
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
作用在飞行器上的力和力矩第一章常用坐标系的定义(上)常用坐标系的定义作用在飞行器上的力和力矩产生的原因各不相同,建立合适的坐标系来描述飞行器的运动是非常重要的。
按照飞行器立轴指向的不同,有两种不同的定义方法。
常用坐标系的定义立轴正方向向上为正向下为正代表性使用国家俄罗斯、中国英国、美国常用坐标系地面坐标系地球坐标系弹(机)体坐标系机体坐标系速度坐标系风轴坐标系弹道坐标系航迹坐标系简称俄式定义英式定义常用坐标系的定义yAz x发射点目标地面坐标系原点A通常为发射点(发射瞬时飞行器的质心)。
常用坐标系定义(俄式)Ax轴通常为原点与目标之间的地球大圆切线,指向目标为正。
Ay轴垂直于Ax轴,向上为正。
Az轴垂直于Axy平面,按右手坐标系确定正方向。
常用坐标系的定义yA zx发射点目标地面坐标系常用坐标系定义(俄式)特点固连于地球表面,随地球一起转动。
近似研究近程飞行力学问题时,可忽略地球的自转和公转,将地球表面看作平面,认为重力与Ay 轴平行,地面坐标系可看作惯性坐标系。
常用坐标系的定义yAzx发射点目标地面坐标系常用坐标系定义(俄式)用途作为基准用于描述飞行器质心位置,姿态和速度方向。
常用坐标系的定义常用坐标系定义(俄式)原点O取在飞行器的质心上。
Ox1轴与飞行器的纵轴重合,指向飞行器的头部为正。
Oy1轴(立轴)位于飞行器的纵向对称面内,垂直于Ox1轴,向上为正。
弹体坐标系Oz1轴垂直于Ox1y1平面,按右手坐标系确定正方向。
常用坐标系的定义常用坐标系定义(俄式)弹体坐标系特点与弹体固连,相对于弹体不动,是动坐标系。
用途描述飞行器相对于地面坐标系的姿态;描述作用在飞行器上的力矩;描述飞行器绕质心的旋转运动。
常用坐标系的定义常用坐标系定义(俄式)原点O取在飞行器的质心上。
Ox2轴与飞行器的速度矢量V重合。
Oy2轴位于包含速度矢量V的铅垂面内,垂直于Ox2轴,向上为正。
Oz2轴垂直于Ox2y2平面,按弹道坐标系右手坐标系确定正方向。
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
高一物理知识点总结第一章第一章:运动的描述和研究运动是物体位置随时间发生变化的过程,是物理学研究的核心内容之一。
在高一物理学习的第一章中,我们学习了运动的描述和研究方法。
本文将对该章节的重要知识点进行总结和梳理。
1. 运动的基本概念运动是指物体在空间中由一个位置变到另一个位置的过程。
在研究运动时,需要考虑物体的位置、时间以及运动状态的变化。
2. 运动的描述方法为了准确描述和研究物体的运动,我们需要引入坐标系和参考系。
坐标系用于确定物体位置的参照物,常用的坐标系有直角坐标系和极坐标系。
参考系是相对于观察者或观察物体而言的,它提供了观察物体运动的基准。
根据参考系与物体的相对运动情况,运动可分为静止、匀速、变速和往复运动等不同类型。
3. 运动的描述量3.1 位移:位移是指运动物体的位置变化情况,是位置的改变量。
位移的大小等于物体的移动距离,并与运动的方向有关。
3.2 速度:速度是描述物体运动快慢和方向的物理量。
平均速度等于位移与所用时间的比值,即v = Δs / Δt。
瞬时速度是在某一时刻的瞬时位移所对应的速度。
3.3 加速度:加速度是指单位时间内速度变化的量。
平均加速度等于速度变化量与所用时间的比值,即a = Δv / Δt。
瞬时加速度是在某一时刻的瞬时速度变化率。
4. 运动的图像表示为了直观地描述和分析物体运动,我们可以利用图像表示来进行研究。
4.1 位置-时间图像:将物体的位置与时间对应,得到的图像叫做位置-时间图像。
通过该图像可以分析物体的位移、速度以及运动状态是否匀速或变速等信息。
4.2 速度-时间图像:将物体的速度与时间对应,得到的图像叫做速度-时间图像。
通过该图像可以分析物体的加速度、匀速或者变速的情况等。
5. 运动的规律5.1 匀速直线运动:在匀速直线运动中,物体的速度保持不变,加速度为零。
在该运动下,物体的位移与所用时间成正比。
5.2 匀变速直线运动:在匀变速直线运动中,物体的加速度保持不变,速度随时间的变化呈线性关系。
电磁场与电磁波公式总结本文是关于电磁场与电磁波的复,第一部分是知识点的归纳。
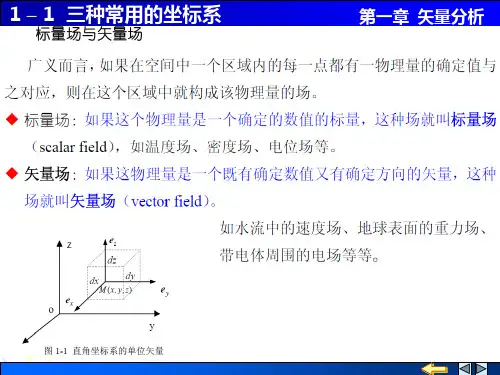
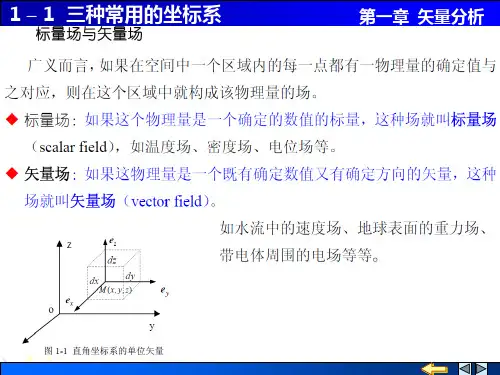
第一章是关于矢量分析的,其中介绍了三种常用的坐标系。
第一种是直角坐标系,其中包括微分线元、面积元和体积元的计算公式。
第二种是柱坐标系,其中也包括微分线元、面积元和体积元的计算公式。
第三种是球坐标系,也有相应的计算公式。
此外,还介绍了三种坐标系之间的坐标变量之间的关系,包括直角坐标系与柱坐标系的关系、直角坐标系与球坐标系的关系以及柱坐标系与球坐标系的关系。
接下来介绍了梯度的计算公式,其中包括直角坐标系、柱坐标系和球坐标系中的计算公式。
最后是散度的计算公式,其中包括直角坐标系和柱坐标系中的计算公式。
1.根据公式$\epsilon_1=\tan\theta_2/\epsilon_2$和$\Delta l=\epsilon_2\theta_2E_{t}$,可以得到分界面上$E_{t}$的边界条件。
2.静电荷系统的总能量可以分为体电荷、面电荷和线电荷三种情况,分别用积分形式表示为$\int \rho \Phi d\tau$,$\int \rho_S \Phi ds$和$\int \rho_L \Phi dl$。
导体系统的总能量为$\sum_{k}^{ }q_{k}\Phi_{k}/2$。
任意一点的能量密度为$\omega_e=D\cdot E=\epsilon E^2/2$,总静电能可以用$\int\epsilon E d\tau$来计算。
3.恒定电场的基本变量为电场强度$E$和电流密度$J$,其中$J=\sigma E$,$\sigma$为媒质的电导率。
电流连续性方程可以用积分形式$J\cdot dS=-\int \partial q/\partial t d\tau$和微分形式$\nabla\cdot J=-\partial\rho/\partial t$表示。
恒定电场中不能有电荷的增减,因此电流连续性方程变为$\int J\cdotdS=0$和$\nabla\cdot J=0$,再加上$\int E\cdot dl=0$和$\nabla\times E=0$,就得到了恒定电场的基本方程的积分和微分形式。