结构力学自由度及几何分析讲解
- 格式:ppt
- 大小:2.35 MB
- 文档页数:56
结构力学自由度的概念结构力学是研究物体在外力作用下的变形和破坏规律的学科。
在结构力学中,自由度是一个非常重要的概念。
本文将从定义、分类和应用三个方面来介绍结构力学自由度的概念。
一、定义自由度是指一个物体在空间中能够自由运动的方向数。
在结构力学中,自由度是指一个结构体系中能够自由变形的方向数。
例如,一个悬臂梁在平面内只能够沿着梁轴方向和垂直于梁轴方向进行变形,因此它的自由度为2。
而一个三维空间中的刚性立方体可以沿着三个方向进行自由变形,因此它的自由度为3。
二、分类结构力学中的自由度可以分为平动自由度和转动自由度两种。
平动自由度是指结构体系中能够沿着直线方向自由变形的方向数,例如悬臂梁的平动自由度为1。
转动自由度是指结构体系中能够绕某个轴线自由旋转的方向数,例如悬臂梁的转动自由度为1。
在实际工程中,结构体系的自由度往往是非常复杂的,需要通过数学方法进行求解。
例如,对于一个由n个节点和m个杆件组成的平面桁架,其总自由度为3n-6-m。
这个公式的推导过程比较复杂,需要运用到刚度矩阵和位移向量等概念。
三、应用结构力学中的自由度概念在实际工程中有着广泛的应用。
例如,在建筑设计中,需要对结构体系的自由度进行分析,以确定结构体系的稳定性和安全性。
在机械设计中,需要对机械结构的自由度进行分析,以确定机械结构的刚度和稳定性。
在航空航天领域中,需要对飞行器的自由度进行分析,以确定飞行器的稳定性和控制性能。
总之,结构力学自由度是一个非常重要的概念,它在实际工程中有着广泛的应用。
通过对自由度的分析,可以确定结构体系的稳定性和安全性,为工程设计提供重要的理论依据。
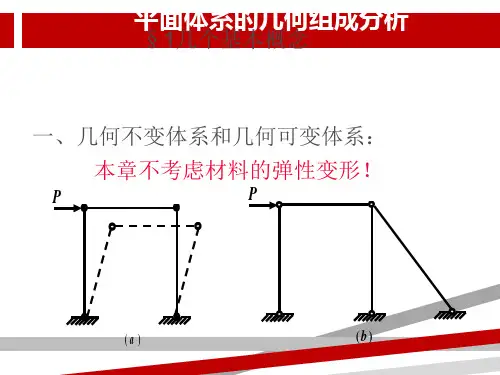
几何组成分析的几个概念1、几何不变体系与几何可变体系几何不变体系是指受到任意荷载作用下,若不考虑材料的应变,其几何形状和位置均能保持不变的体系。
几何可变体系是指即使不考虑材料的应变,在微小的荷载作用下也会产生刚体位移,而不能保持原有的几何形状和位置。
几何可变体系分为几何常变体系和几何瞬变体系。
几何可变体系在很小的荷载作用下会产生刚体位移,经微小位移后仍能继续发生刚体运动,这样的几何可变体系称为几何常变体系。
若原为几何可变体系,经微小位移后即转化为几何不变体系,这类几何可变体系称为几何瞬变体系。
工程结构绝不能采用几何瞬变体系,而且也应避免采用接近于瞬变的体系。
2、自由度指体系在所受限制的许可条件下独立的运动方式,即能确定体系几何位置的彼此独立的几何坐标数目。
平面内一点的自由度为2,一个刚片的自由度为3。
3、约束(联系)约束是指限制体系运动的各种装置,包括外部约束(支座约束)和内部约束。
(1)外部约束一个活动铰支座、固定铰支座和固定支座分别相当于1、2、3个约束。
(2)内部约束一根单链杆相当于1个约束;连接j(j>2)个结点的复链杆,相当于2j-3个单链杆,即相当于2j-3个约束;一个单铰相当于2个约束;连接m(m>2)个刚片的复铰,可折合成(m-1)个单铰,即相当于2(m-1)个约束作用;一单刚结点相当于3个约束;连接m(m>2)个刚片的刚结点称为复刚结点,可折合成(m-1)个单刚结点,即相当于3(m-1)个约束。
约束从能否减少体系的自由度方面来考虑,可分为必要约束和多余约束。
为保持体系几何不变所必须具有的约束称为必要约束,不能使体系的自由度数目减少的约束称为多余约束。
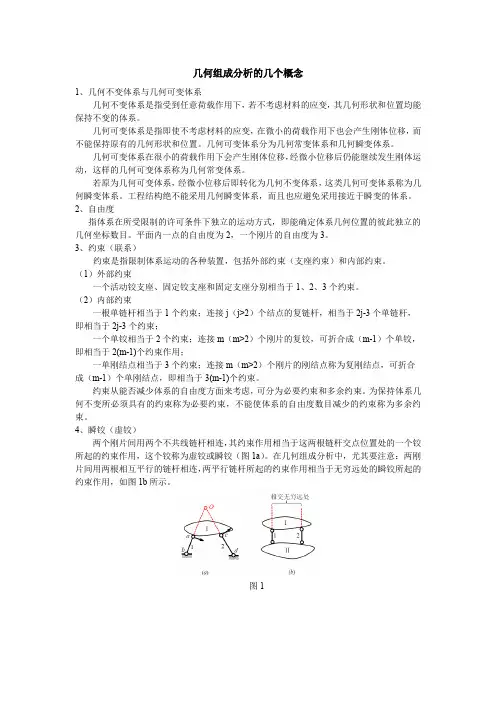
4、瞬铰(虚铰)两个刚片间用两个不共线链杆相连,其约束作用相当于这两根链杆交点位置处的一个铰所起的约束作用,这个铰称为虚铰或瞬铰(图1a)。
在几何组成分析中,尤其要注意:两刚片间用两根相互平行的链杆相连,两平行链杆所起的约束作用相当于无穷远处的瞬铰所起的约束作用,如图1b所示。

结构力学中体系的计算自由度写在前面:①【自由度】:体系运动时所具有的独立运动方式数目,也就是体系运动时可以独立变化的几何参考数目,或者说确定体系位置所需的独立坐标数目。
如:一个点在平面中的自由度为2(两个平动);一个刚片在平面中的自由度数为3(两个平动和一个转动)。
②【约束】:限制运动的装置称为联系(或约束),体系的自由度可因加入联系而减少,能减少一个自由度的装置称为一个联系(或约束)。
常用的联系有链杆和铰。
一根链杆为一个联系,一个单铰为两个联系,也就是相当于两根链杆的作用。
联结n 个刚片的复铰可以当做(n-1)个单铰,将减少2(n-1)个约束;联结n 个刚片的复刚结点可以当做(n-1)个单刚结点,将减少3(n-1)个约束。
在体系中加入一个联系,而并不能减少体系的自由度,这样的联系称为多余联系(联系)。
使体系成为几何不变而必须的约束称为必要联系(约束)。
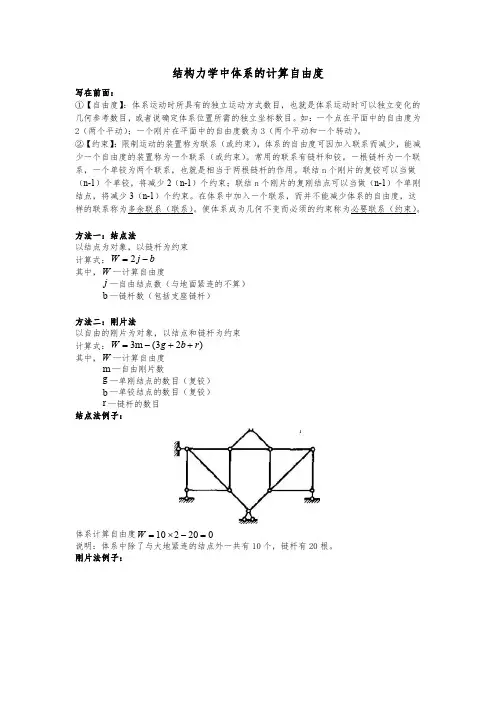
方法一:结点法以结点为对象,以链杆为约束计算式:bj W -=2其中,W —计算自由度j —自由结点数(与地面紧连的不算)b —链杆数(包括支座链杆)方法二:刚片法以自由的刚片为对象,以结点和链杆为约束计算式:)23(m 3r b g W ++-=其中,W —计算自由度m —自由刚片数g —单刚结点的数目(复铰)b —单铰结点的数目(复铰)r —链杆的数目结点法例子:体系计算自由度020210=-⨯=W 说明:体系中除了与大地紧连的结点外一共有10个,链杆有20根。
刚片法例子:体系计算自由度[]116263317=⨯+⨯-⨯=W 说明:将刚片拆分成17根,刚结点4,铰结点14。
NOTE :①刚片法中的单铰结点数和单刚结点数以及链杆数指刚片间的;②大地也是一大刚片,但大地作为参考系没有自由度,算自由刚片的时候不能算上,但是若是将支座链杆也看做是刚片的话,则需要考虑支座链杆与大地之间的单铰接点或单刚结点;③可以用计算自由度的方法分析体系的几何构造:0>W ,表明体系中缺少足够的约束,为几何常变体系;0=W ,表明体系具有成为几何不变所需要的最少联系数目。