计算机控制技术实验讲义
- 格式:doc
- 大小:804.50 KB
- 文档页数:30

《计算机控制技术》实验指导书安阳工学院电子信息与电气工程学院目录实验一 数字滤波程序设计(设计性)实验二 PID控制器的设计及性能分析实验三 大延迟系统的SIMULINK建模与仿真实验一数字滤波程序设计(设计性)一、实验目的1 掌握数字滤波的设计方法2 培养学生初步的MATLAB编程能力二、实验设备三、实验原理 通过数字滤波来增强其有效信号,消除或减小各种干扰和噪声,从而提高控制精度和系统的可靠性与稳定性。
四、实验内容与要求1 限幅滤波方法:自己构造一个变化缓慢的数字序列作为输入,画图1-1,加入随机干扰,再画图1-2,设计一段限幅滤波程序,并把滤波后的信号画在图1-3,与图1-1进行比较,如果效果不满意,调整程序中的参数,反复调整,直至效果令人满意为止。
(要求三个子图画在一张图片上。
提示:figure,subplot(3,1,1))2 中位值滤波方法:自己构造一个变化缓慢的数字序列作为输入,画图2-1,加入随机干扰,再画图2-2,设计一段中位置滤波程序,并把滤波后的信号画在图2-3,与图2-1进行比较,如果效果不满意,调整程序中的参数,反复调整,直至效果令人满意为止。
(提示:median)3 算术平均滤波方法:自己构造一个变化较快的数字序列作为输入,画图3-1,加入随机干扰,再画图3-2,设计一段算术平均滤波程序,并把滤波后的信号画在图3-3,与图3-1进行比较,如果效果不满意,调整程序中的参数,反复调整,直至效果令人满意为止。
(提示:mean)4 实验完毕后,认真完成实验报告,写出设计的程序并画出相应的图。
实验二 PID控制器的设计及性能分析一、实验目的1 掌握PID控制器的设计方法2 培养学生初步的MATLAB编程能力二、实验设备三、实验原理 PID控制是工业控制中最常用的一种控制规律,通过调整比例系数、积分系数、微分系数,可以得到不同的控制效果。
四、实验内容与要求例:已知某单位负反馈系统开环传递函数如下:如果采用比例(P)控制器进行调节,试绘制比例系数分别为1、4、10、50时的单位阶跃响应曲线,并分析比例控制器对控制系统性能的影响。

计算机控制技术实验教案电气信息学院自动化系2007.5实验目的:▪了解计算机控制系统的基本构成,掌握计算机数据采集、数据转换原理,了解常规计算机控制策略。
▪掌握PCL-818L-B数据采集卡的功能及作用。
▪了解LabVIEW软件。
实验学时与实验内容:▪实验总学时:4学时▪实验内容:1. PCL-818L-B数据采集与转换实验《计算机控制技术实验指导书》实验一2学时2.实验法确定温控炉的数学模型《计算机控制技术实验指导书》实验三2学时实验要求:▪独立完成实验。
▪保持实验室整洁卫生,不要喧哗。
▪爱护实验器材,出现故障要立即报告指导教师。
▪认真仔细接线,温控炉实验线路需经指导教师检查后才能通电。
▪实验过程中认真做好原始记录,经指导教师签字确认后粘贴在实验报告上。
▪拆线前要先断电源。
实验成绩:实验成绩占课程总成绩的15%。
(15分)(实验报告必须在实验结束后一周内交齐)实验报告要求:▪报告内容:实验名称、实验目的、实验设备、实验过程(步骤)、实验记录的数据 (列表)及曲线,实验结果验证与分析,回答思考题等。
▪实验报告要独立完成,不要互相抄袭,图要正规,记录要清晰,字迹要工整。
实验一 PCL-818L-B数据采集与转换实验▪PCL-818L-B数据采集卡台湾研华公司生产,主要功能:A/D转换、D/A转换、数字输入、数字输出,定时、计数。
性能:8路差分或16路单端模拟量输入(12位A/D转换、可达100KHz采样率),1路模拟量输出(12位),16路数字量输入,16路数字量输出。
▪研华自带设备管理:开始\程序\Advantech Automation\Device manager\ Advantech Device manager LabVIEW程序:AD: c:\program Files\National Instruments\Labview 7.0\examples\Advantech\Adexp.vi DI: c:\program Files\NationalInstruments\Labview 7.0\examples\Advantech\DigInBit.vi或DigInByte.vi DO: c:\program Files\National Instruments\Labview 7.0\examples\Advantech\DigOutBit.vi或DigOutByte.vi十六路模拟量单端输入八路模拟量差分输入(抑制共模干扰)▪注意稳压电源的使用▪预习实验法确定温控炉的数学模型实验三实验法确定温控炉的数学模型▪注意:+12V、-12V电源一定不能接反。
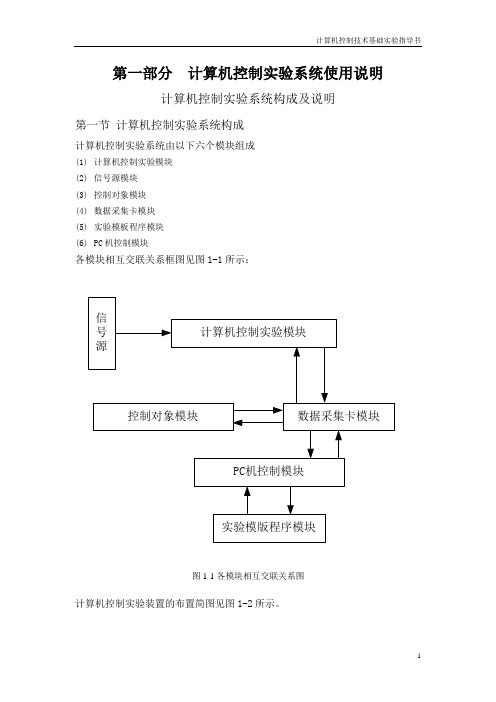
第一部分计算机控制实验系统使用说明计算机控制实验系统构成及说明第一节计算机控制实验系统构成计算机控制实验系统由以下六个模块组成(1)计算机控制实验模块(2)信号源模块(3)控制对象模块(4)数据采集卡模块(5)实验模板程序模块(6)PC机控制模块各模块相互交联关系框图见图1-1所示:图1-1各模块相互交联关系图计算机控制实验装置的布置简图见图1-2所示。
图1-2计算机控制装置简图第二节计算机控制实验系统说明计算机控制实验系统是由上位PC微机(含PCI-1711数据采集卡及驱动软件),ACCC-Ⅲ实验装置,连接电缆线等组成。
1. ACCC-Ⅲ实验装置简介ACCC-Ⅲ实验装置是一个通用的计算机控制实验装置。
它主要包括电源部分U1单元,信号源部分U2单元,与PC机进行通讯的数据处理单元U3,自由插件端子单元U4,模拟电路单元U6~U14以及电机转速、温度、水槽液位控制单元组成,详见附图。
(1) U1电源单元:包括电源开关,保险丝,提供±5V,±15V,0V,1.2~15V可调电压的输出。
(2) U2信号源单元:包括周期性正弦信号,周期性斜坡、方波、抛物线信号,频率幅值可调。
其中斜坡、方波、抛物线信号幅值范围为:0V-10V,频率范围为:0.13Hz-8.3Hz;正弦信号的幅值范围为:0V-5V,频率范围为:低频0.5Hz~81Hz,高频63Hz~10kHz。
(3) U3数据处理单元:PCI-1711数据采集卡在实验装置上的接口端子,通过RS232串行口与上位PC机进行通讯。
(4) U4提供实验所需的电容、电阻、电位器,提供插接电路,可以根据实验需要自行选择连接的元器件。
(5) U5提供16个开关量作为PCI-1711数据采集卡数字量输入的测试信号,16个LED指示灯作为数据采集卡数字量输出控制单元。
(6) U6~U14为运算放大器、电阻及电容等器件组成的模拟电路单元,由场效应管组成的电路用于锁零。
计算机控制技术实验指导书微机原理实验室2012—3--21一、课程简介:本课程主要介绍计算机控制系统的组成原理、基本类型、设计方法和应用举例。
主要内容有:绪论(包括计算机监控系统的基本构成、类型和发展趋势)、数据通信基础、通道与I/O 接口、控制算法的计算机实现、常用软件技术、基于个人计算机的监控系统、基于PLC的计算机监控系统、现场总线技术、集散控制系统、计算机监控系统设计方法、计算机监控系统应用举例。
本实验的具体任务:1.通过实验,加深学生对微型计算机控制系统的认识和理解。
2.掌握基本控制方法的物理意义和实现方法。
3.能够设计基本的微机控制系统,掌握微机控制系统的软硬件设计方法。
二、课程实验目的与要求:本课程的教学目的在于通过教学使同学们掌握计算机监控系统的基本原理,掌握常用的硬件和软件设计方法,了解计算机监控技术的应用现状、最新发展以及发展趋势,掌握计算机监控系统的基本开发技术等。
具体体现在以下几方面:1.在实验过程中,教育学生养成良好的实验习惯,独立完成实验的全过程,爱护仪器和设备;遵守纪律,树立良好的学风,使学生了解实验的重要性以及实验课程的地位和作用;2.注意培养学生的科学实验能力,逐步提高排除故障、发现问题和解决问题的能力,培养学生进行微机软硬件的设计、调试的能力;3.拓宽和加深学生对已学过的理论知识的理解,培养学生实际应用能力,从而掌握比较全面的专业知识。
4.通过学生动手编程和电路连接,熟悉微型计算机控制系统的组成,让学生掌握微型计算机技术的实际应用方法和技能,掌握常用控制方法的程序设计。
5.实验完成后必须按时提交实验报告。
三、考试(考核)方式:根据实验报告、实验中的动手能力和解决实际问题的能力综合考核。
实验报告成绩占课程总成绩的40%。
实验中的动手能力和解决实际问题的能力考核占总成绩的60%。
四、场地与主要设备及消耗性器材1.场地:微机原理实验室面积:120平方米2.所用设备:微型计算机、EL-MUT-III微机原理实验箱、示波器等。

中国矿业大学银川学院《计算机控制技术》实验指导书机电动力与信息工程系季新芳编二0一三年十月第1章课程简介、实验项目及实验要求一、课程简介《计算机控制技术》是一门实践性很强的课程。
加强这门课程的实验教学可以起到重要的作用,有利于提高人才的培养质量,巩固和宽展实际的动手能力,实现知识向能力的转化。
实验的任务是使学生掌握计算机控制系统组成原理、设计方法和技术,培养学生设计和调试的能力,为今后从事工程应用和科学研究打好基础。
二、教学基本要求以提高学生实际工程设计能力为目的,通过实验和训练,使学生熟悉一种工程上常用的实验参数整定法。
三、实验项目与类型四、实验报告要求(1)学生在进行实验前应复习《计算机控制技术》等教材中的与实验相关的理论知识,认真阅读实验指导书及与其有关的参考资料,明确实验要求,做好实验准备。
(2)实验报告应按实验指导书的要求根据原始记录做出,于规定时间内交到指导教师处。
(3)要独立写出严谨、有理论分析、实事求是、文理通顺、字迹端正、图表清楚的实验报告。
数据真实、准确,结论明确。
报告要有经指导教师签字后的原始记录。
(4)实验报告应包括以下几个部分:①实验名称、班级、姓名、学号、实验日期②实验目的③实验内容及原理线路图④数据处理⑤实验总结:对实验结果和实验中的现象进行简明的分析并做出结论或评价;对本人在实验全过程中的经验、教训、体会、收获等进行必要的小结。
⑥提出对改进实验内容、安排、方法设备等的建议或具体设想。
(5)对数据处理的具体要求①将原始记录中要用到的数据整理后列表,并写明其实验条件;需要计算的加以计算后列入表中,同时说明所用的计算并以其中一点数据代入来说明计算过程。
②计算参数或性能等时,要先列出公式,然后代入数字,直接写出计算结果。
③对绘制曲线的要求:·绘制曲线可选用坐标纸。
使用时曲线的位置大小应适中,不要太小且偏于一方。
需要比较的各条曲线应画在同一坐标纸上。
·各坐标轴应标明代表物理量的名称和单位所用比例尺应方便作图和读数。
计算机控制技术基础实验实验一A/D与D/A转换一、实验目的1.通过实验了解实验系统的结构与使用方法;2.通过实验了解模拟量通道中模数转换与数模转换的实现方法。
二、实验设备1.THKKL-5型控制理论·计算机控制技术实验箱2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)3.PC机1台(含软件“THKKL-5”)三、实验内容1.输入一定值的电压,测取模数转换的特性,并分析之;2.在上位机输入一十进制代码,完成通道的数模转换实验。
四、实验步骤1.启动实验箱的“电源总开关”,打开±5、±15V电源。
将“阶跃信号发生器”单元输出端连接到“数据采集接口单元”的“AD1”通道,同时将采集接口单元的“DA1”输出端连接到接口单元的“AD2”输入端;2.将“阶跃信号发生器”的输入电压调节为1V;3.启动计算机,在桌面双击图标“THKKL-5”软件,在打开的软件界面上点击“开始采集”按钮;4.点击软件“系统”菜单下的“AD/DA实验”,在AD/DA实验界面上点击“开始”按钮,观测采集卡上AD转换器的转换结果,在输入电压为1V(可以使用面板上的直流数字电压表进行测量)时应为00001100011101(共14位,其中后几位将处于实时刷新状态)。
调节阶跃信号的大小,然后继续观察AD转换器的转换结果,并与理论值(详见本实验附录)进行比较;5.根据DA转换器的转换规律(详见本实验附录),在DA部分的编辑框中输入一个十进制数据(如2457,其范围为0~4095),然后虚拟示波器上观测DA转换值的大小;6.实验结束后,关闭脚本编辑器窗口,退出实验软件。
五、附录1.数据采集卡本实验箱采用了THBXD数据采集卡。
它是一种基于USB总线的数据采集卡,卡上装有14Bit分辨率的A/D转换器和12Bit分辨率的D/A转换器,其转换器的输入量程均为±10V、输出量程均为±5V。
该采集卡为用户提供4路模拟量输入通道和2路模拟量输出通道。
其主要特点有:1) 支持USB1.1协议,真正实现即插即用2) 400KHz 14位A/D转换器,通过率为350K,12位D/A转换器,建立时间10μs3) 4通道模拟量输入和2通道模拟量输出4) 8K深度的FIFO保证数据的完整性5) 8路开关量输入,8路开关量输出2.AD/DA转换原理数据采集卡采用“THBXD ”USB 卡,该卡在进行A/D 转换实验时,输入电压与二进制的对应关系为:-10~10V 对应为0~16383(A/D 转换为14位)。
其中0V 为8192。
其主要数而DA 转换时的数据转换关系为:-5~5V 对应为0~4095(D/A 转换为12位),其数据格式(3.编程实现测试信号的产生利用上位机的“脚本编程器”可编程实现各种典型信号的产生,如正弦信号,方波信号,斜坡信号,抛物线信号等。
其函数表达式分别为:1) 正弦信号)sin(ϕω+=t A y ,ωπ2=T2) 方波⎩⎨⎧<≤<≤=Tt T T t Ay 1103) 斜坡信号⎩⎨⎧<≤<≤=Tt T T t at y 1100 ,a 为常量4) 抛物线信号⎪⎩⎪⎨⎧<≤<≤=Tt T T t at y 1120021,a 为常量 这里以抛物线信号为例进行编程,其具体程序如下:dim tx,op,a ‘初始化函数sub Initialize(arg) ‘初始化函数WriteData 0 ,1 ‘对采集卡的输出端口DA1进行初始化 tx=0 ‘对变量初始化 end subsub TakeOneStep (arg) ‘算法运行函数a=1op=0.5*a*tx*tx ‘0.1为时间步长tx=tx+0.1if op>3 then ‘波形限幅tx=0end ifWriteData op ,1 ‘数据从采集卡的DA1端口输出end subsub Finalize (arg)‘退出函数WriteData 0 ,1end sub通过改变变量tx、a的值可改变抛物线的上升斜率。
实验二 数字滤波器一、实验目的1.通过实验熟悉数字滤波器的实现方法; 2.研究滤波器参数的变化对滤波性能的影响。
二、实验设备1.THKKL-5型 控制理论·计算机控制技术实验箱2.THBXD 数据采集卡一块(含37芯通信线、16芯排线和USB 电缆线各1根) 3.PC 机1台(含软件“THKKL-5”) 三、实验内容1.设计一个带尖脉冲(频率可变)干扰信号和正弦信号输入的模拟加法电路; 2.设计并调试一阶数字滤波器; 3.设计并调试高阶数字滤波器。
四、实验原理1.在许多信息处理过程中,如对信号的滤波,检测,预测等都要广泛地用到滤波器。
数字滤波器是数字信号处理中广泛使用的一种线性环节,它从本质上说是将一组输入的数字序列通过一定规则的运算后转变为另一组希望输出的数字序列。
一般可以用两种方法来实现:一种是用数字硬件来实现;另一种是用计算机的软件编程来实现。
一个数字滤波器,它所表达的运算可用差分方程来表示: ∑∑==-+-=Ni i Ni i i n y b i n x a n y 0)()()(2.一阶数字滤波器及其数字化 一阶数字滤波器的传递函数为 11)()()(+==s s X s Y s G F τ 利用一阶差分法离散化,可以得到一阶数字滤波器的算法:)1()1()()(--+=k y T k x T k y SS ττ其中T S 为采样周期,τ为滤波器的时间常数。
T S 和τ应根据信号的频谱来选择。
3.高阶数字滤波器高阶数字滤波器算法很多,这里只给出一种加权平均算法: )3()2()1()()(4321-+-+-+=K x A K x A K x A K x A K y其中权系数i A 满足:∑==411i i A 。
同样,i A 也根据信号的频谱来选择。
五、实验步骤1.实验接线及准备1.1 启动计算机,在桌面双击图标THKKL-5,运行实验软件;1.2 启动实验箱的“电源总开关”,打开±5、±15V 电源。
将低频函数信号发生器单元输出端连接到采集卡的“AD1”通道,并选择方波输出。
在虚拟示波器观测方波信号的频率和幅值,然后调节信号发生器中的“频率调节”和“幅度调节”电位器,使方波信号的频率和幅值分别为4Hz ,2V 。
然后断开与采集卡的连接,将低频函数信号发生器单元输出端连接到“通用电路单元十一”输入端,输出端产生一个尖脉冲信号Uo;1.3 按图2-2连接电路,其中正弦信号来自数据采集卡的“DA1”输出端,尖脉冲信号来自“通用电路单元十一”的输出端。
图2-2的输出端与数据采集卡的“AD1”输入端相连,同时将数据采集卡的“DA2”输出端与“AD2”输入端相连。
2.脚本程序运行2.1点击软件工具栏上的“”按钮(脚本编程器),打开脚本编辑器窗口;2.2在脚本编辑器窗口的文件菜单下点击“打开”按钮,并在“计算机控制算法VBS\计算机控制技术基础算法”文件夹下选中“数字滤波”脚本程序并打开,阅读、理解该程序,然后点击脚本编辑器窗口的调试菜单下“步长设置”,将脚本算法的运行步长设为10ms;2.3点击脚本编辑器窗口的调试菜单下“启动”,用双踪示波器分别观察图2-2的输出端和数据采集卡输出端“DA2”的波形。
调节信号发生器中的“频率调节”电位器,改变方波信号的频率(即尖脉冲干扰信号的频率)。
观察数据滤波器的滤波效果;2.4点击脚本编辑器的调试菜单下“停止”,修改算法程序中的参数Ts(注:修改Ts时要同步修改算法的运行步长)、Ti两个参数,然后再运行该程序,在示波器上再次观察参数变化对滤波效果的影响;2.5对于高阶数字滤波器的算法编程实验,请参考本实验步骤2.2、2.3和2.4。
不同的是打开的脚本程序文件名为“数字滤波(高阶)”,实验时程序可修改的参数为a1、a2、a3和采样时间Ts。
2.6 实验结束后,关闭脚本编辑器窗口,退出实验软件。
六、实验报告要求1.画出尖脉冲干扰信号的产生电路图。
2.编写一阶数字滤波器的脚本程序。
3.绘制加数字滤波器前、后的输出波形,并分析程序中参数的变化对其滤波效果的影响。
七、附录1.尖脉冲干扰信号产生的模拟电路图图2-1 尖脉冲产生电路通过改变方波信号的频率,即可改变尖脉冲的频率。
2.实验电路的信号的产生把图2-1产生的尖脉冲信号视为干扰信号,与一低频正弦信号(由上位机的“脚本编辑器”编程输出)输入到图2-2所示的两个输入端。
图2-2 测试信号的产生电路图3.一阶数字滤波器的程序编写与调试示例dim pv,op1,op2,Ts,t,opx,x,Ti ‘变量定义sub Initialize(arg)‘初始化函数WriteData 0 ,1opx=0end subsub TakeOneStep (arg) ‘算法运行函数pv = ReadData(1) ‘采集卡通道1的测量值op1=2*sin(x) ‘正弦信号的产生x=x+0.1Ti=0.02Ts=0.01 ‘采样时间10msop2=Ts/Ti*pv+(1-Ts/Ti)*opx ‘一阶数字滤波器的输出opx=op2if op2>=4.9 thenop2=4.9end ifif op2<=-4.9 thenop2=-4.9end ifWriteData op1 ,1 ‘正弦信号从DA1端口输出WriteData op2 ,2 ‘滤波后的信号从DA2端口输出end subsub Finalize (arg) ‘退出函数WriteData 0 ,1WriteData 0 ,2end sub实验三单闭环直流调速系统一、实验目的1.掌握用PID控制规律的直流调速系统的调试方法;2.了解PWM调制、直流电机驱动电路的工作原理。
二、实验设备1.THKKL-5型控制理论·计算机控制技术实验箱2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)3.PC机1台(含软件“THKKL-5”)三、实验原理直流电机在应用中有多种控制方式,在直流电机的调速控制系统中,主要采用电枢电压控制电机的转速与方向。
功率放大器是电机调速系统中的重要部件,它的性能及价格对系统都有重要的影响。
过去的功率放大器是采用磁放大器、交磁放大机或可控硅(晶闸管)。
现在基本上采用晶体管功率放大器。
PWM功率放大器与线性功率放大器相比,有功耗低、效率高,有利于克服直流电机的静摩擦等优点。
PWM调制与晶体管功率放大器的工作原理:1.PWM的工作原理图13-1 PWM的控制电路上图所示为SG3525为核心的控制电路,SG3525是美国Silicon General公司生产的专用PWM控制集成芯片,其内部电路结构及各引脚如图13-2所示,它采用恒频脉宽调制控制方案,其内部包含有精密基准源、锯齿波振荡器、误差放大器、比较器、分频器和保护电路等。