非线性系统分析习题
- 格式:docx
- 大小:206.67 KB
- 文档页数:8
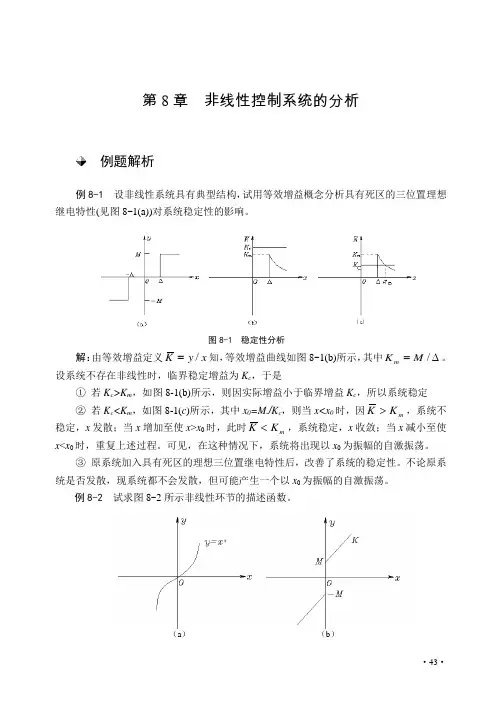
·43·第8章 非线性控制系统的分析例题解析例8-1 设非线性系统具有典型结构,试用等效增益概念分析具有死区的三位置理想继电特性(见图8-1(a))对系统稳定性的影响。
图8-1 稳定性分析解:由等效增益定义x y K /=知,等效增益曲线如图8-1(b)所示,其中∆=/M K m 。
设系统不存在非线性时,临界稳定增益为K c ,于是① 若K c >K m ,如图8-1(b)所示,则因实际增益小于临界增益K c ,所以系统稳定 ② 若K c <K m ,如图8-1(c )所示,其中x 0=M./K c ,则当x<x 0时,因m K K >,系统不稳定,x 发散;当x 增加至使x >x 0时,此时m K K <,系统稳定,x 收敛;当x 减小至使x <x 0时,重复上述过程。
可见,在这种情况下,系统将出现以x 0为振幅的自激振荡。
③ 原系统加入具有死区的理想三位置继电特性后,改善了系统的稳定性。
不论原系统是否发散,现系统都不会发散,但可能产生一个以x 0为振幅的自激振荡。
例8-2 试求图8-2所示非线性环节的描述函数。
(a ) (b )·44·图 8-2 非线性环节解:(1)对于图8-2(a ),因为t X x x y ωsin ,3==且单值奇对称,故A1=03204320432043sin 4sin 1sin 11X t td X t d t X t td y B ====⎰⎰⎰πππωωπωωπωωπ21143)(X X A j X B X N =+=图 8-3(2)对于图8-2(b ),因为图示非线性可以分解为图8-3所示两个环节并联,所以 K XMX N X N X N +=+=π4)()()(21 例8-3 试将图8-4(a ),(b )所示系统归化为一个非线性部分和一个线性部分串联的典型结构。
(a ) (b )图 8-4解:(1)G 1与G 2是小回路的负反馈,则2111G G G G +=从而得典型结构,见图8-5。
第7章 非线性系统分析一、选择题1.非线性系统的无穷多条相轨迹相交的点称为()。
[华中科技大学研]A.奇点B.会合点C.分离点D.终点【答案】A2.输出信号的一次谐波分量和输入信号的复数比定义为非线性环节的()。
[华中科技大学研]A.传递函数B.描述函数C.谐波函数D.频率特性【答案】B二、解答题1.已知非线性系统如图7-1所示,其中,T>0,K>0,现要求系统输入量c(t)的ωc=10,试确定参数T和K的数值。
(非线性环节自振振幅X c=0.1,角频率为)[上海交通大学研]图7-1解:由已知ωc =10,线性部分传递函数为即又由于ωc =10,自振振幅X c =0.1得因此有2.已知某非线性系统结构如图所示,试用描述函数法分析K (K >0)值对系统稳定性的影响。
[南京航空航天大学2006研]图7-2 非线性系统结构图解:该饱和特性的描述函数为负倒描述函数当A =1时,,当A→+∞时,,因此位于负实轴上的-1~-∞区段。
线性部分频率特性为令ImG (j ω)=0,得G (j ω)与负实轴交点的频率为,且在复平面上绘制G (j ω)曲线以及曲线如下图所示。
由图可见,当时,即0<K <6系统稳定;当时,即K >6系统产生自振。
自振频率,振幅A 由求得。
图7-33.某单位负反馈非线性系统如图所示,非线性环节的描述函数为,线性部分的传递函数如图所示。
试分析:(1)系统是否存在自振。
(2)若产生自振,计算自振频率及振幅,并讨论极限环的稳定性。
[浙江大学2008研]图7-4 非线性系统结构图解:非线性环节负倒描述函数为线性部分频率特性为且在复平面上绘制G(jω)曲线以及曲线如下图所示,相交于B点,有解得即系统存在自振的频率为1.155,振幅为11.246。
图7-54.已知非线性控制系统的结构图如图7-6所示。
为了使系统不产生自持振荡,试采用描述函数法确定图中非线性环节的特性参数a和b的数值。
[长安大学研][南京理工大学研][华中科技大学研]图7-6解:由题知非线性环节为死区继电器特性,则图形如图7-8所示。
参考答案一、填空题1. 非本质;本质2. 自持振荡3. 初始条件;输入信号大小4. 饱和非线性;死区非线性;间隙非线性;继电器非线性5. 不稳定6. 稳定;不稳定;半稳定7. 自左向右;自右向左 二、分析与计算题1. 求3()()y t ax t =的描述函数。
解:由于3()()y t ax t =是单值奇函数,所以其傅里叶级数展开式中A 0=0、A 1=0、φ1=0,将()sin x t A t ω=代入B 1的计算公式,可得2102330340320320303031()sin 1sin sin 2sin 21cos 2()2212cos 2cos 241cos 412cos 22242311(cos 2cos 4)828231(sin 284B y t td taA t td t aA td t aA t d t aA t t d t tt aA d t aA t t d t aA πππππππωωπωωωπωωπωωπωωωπωωωπωωωπππ===-=-+=+-+==-+=-⎰⎰⎰⎰⎰⎰⎰31sin 4)003234t t aA ππωω+=所以32133()44B aA N A aA A A ===2.设具有滞环继电器非线性特性的非线性系统结构如题图8.1所示,已知b =1,a =0.3,试判断系统是否存在自持振荡,若存在,则求出自持振荡的幅值和频率。
题图8.1解:具有滞环的继电器非线性特性的描述函数为24()j()abN A A a Aπ=≥其描述函数负倒数特性为1j ()()4a A a N A bπ-=≥ 可见,描述函数负倒数特性的虚部为常数4a b π-,即1()N A -曲线为一条虚部为4abπ-的直线。
由于10()(21)(0.41)G s s s =++,所以222222222210(j )(2j 1)(0.4j 1)10(12j )(10.4j )(14)(10.16)10(1 2.4j 0.8)(14)(10.16)10824j (14)(10.16)(14)(10.16)G ωωωωωωωωωωωωωωωωω=++--=++--=++-=-++++由以上可知,1()N A -曲线与(j )G ω必有交点,而且交点为稳定的,因此会产生自持振荡。
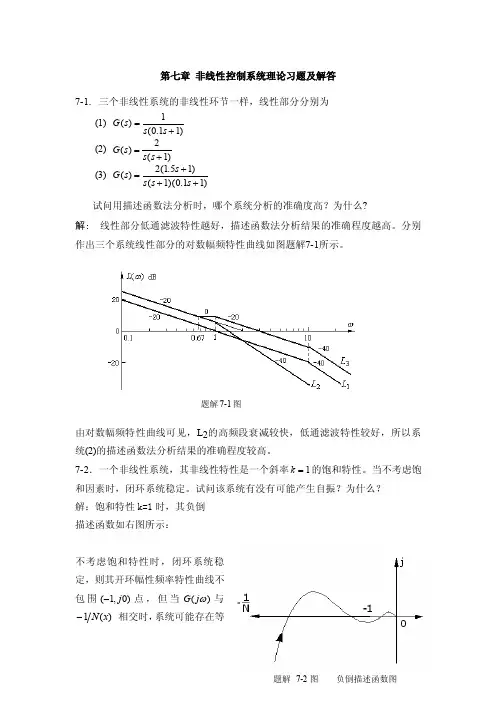
题解 7-2图 负倒描述函数图第七章 非线性控制系统理论习题及解答7-1. 三个非线性系统的非线性环节一样,线性部分分别为(1) G s s s ()(.)=+1011(2) G s s s ()()=+21(3) G s s s s s ()(.)()(.)=+++21511011试问用描述函数法分析时,哪个系统分析的准确度高?为什么?解: 线性部分低通滤波特性越好,描述函数法分析结果的准确程度越高。
分别作出三个系统线性部分的对数幅频特性曲线如图题解7-1所示。
由对数幅频特性曲线可见,L 2的高频段衰减较快,低通滤波特性较好,所以系统(2)的描述函数法分析结果的准确程度较高。
7-2.一个非线性系统,其非线性特性是一个斜率1=k 的饱和特性。
当不考虑饱和因素时,闭环系统稳定。
试问该系统有没有可能产生自振?为什么? 解:饱和特性k=1时,其负倒 描述函数如右图所示:不考虑饱和特性时,闭环系统稳定,则其开环幅性频率特性曲线不包围(1,0)j -点,但当)(ωj G 与)(1x N - 相交时,系统可能存在等题解7-1图幅振荡,如图所示,因此,该系统有可能产生自振。
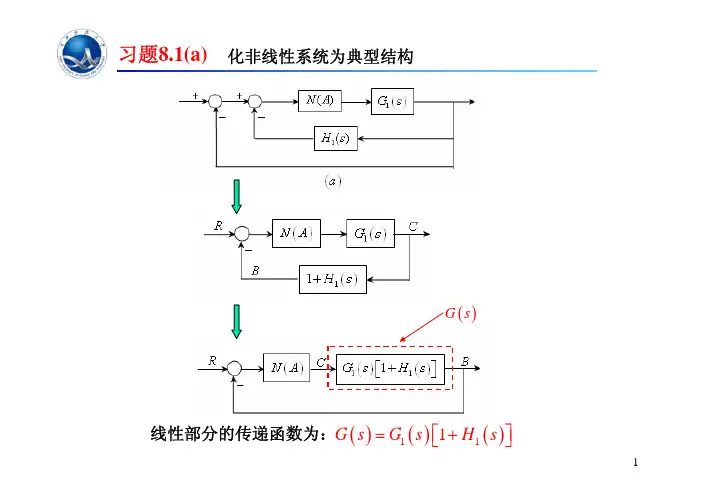
7-3.将下列图7-50 所示非线性系统简化成非线性部分)(X N 和等效的线性部分)(s G 相串联的单位反馈系统,并写出线性部分的传递函数)(s G 。
解:(1)系统结构图可等效变换为题解7-3(1)的形式:其中)()(1)()(211s G s G s G s G +=(2)将系统结构图等效变换为题解7-2(2)的形式:G s G s H s ()()[()]=+111(3)将系统结构图等效变换为题解7-3(3)的形式:G s H s G s G s ()()()()=+1111题解7-3(1)图题解 7-3(2)图 题解 7-3(3)图7-4.判别图7-51所示各系统是否存在自振点。
解: (a)不是(b)是(c)是(d)ca、点是,b点不是(e)是(f)a点不是,b点是(g)a点不是,b点是(h)系统不稳定(i)系统不稳定(j)系统稳定(k)7-5.非线性系统如图7-52所示。

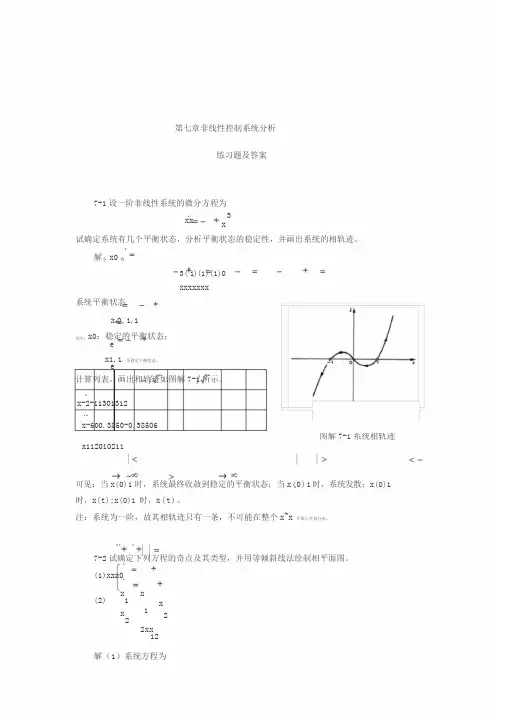
第七章非线性控制系统分析练习题及答案7-1设一阶非线性系统的微分方程为xx3 x试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解令x0得3(21)(1)(1)0xxxxxxx系统平衡状态x e0,1,1其中:x0:稳定的平衡状态;ex1,1:不稳定平衡状态。
e计算列表,画出相轨迹如图解7-1所示。
x-2-11301312x-600.3850-0.38506x112010211图解7-1系统相轨迹可见:当x(0)1时,系统最终收敛到稳定的平衡状态;当x(0)1时,系统发散;x(0)1 时,x(t);x(0)1时,x(t)。
注:系统为一阶,故其相轨迹只有一条,不可能在整个x~x平面上任意分布。
7-2试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1)xxx0(2) x1x2xx122xx12解(1)系统方程为1:xxx0(x0):xxx0(x0)令xx0,得平衡点:x e0。
系统特征方程及特征根:132:ss10,sj(稳定的焦点)1,2222:ss10,s1.618,0.618(鞍点)1,2xf(x,x)xx, d xdxxxxdx dx 1xx,1xxx11I:1(x0)1II:1(x0)计算列表-∞-3-1-1/301/313∞x0:11-1-2/302-∞-4-2-4/3-1x0:11-1-4/3-2-4∞20-2/3-1用等倾斜线法绘制系统相平面图如图解7-2(a)所示。
2图解7-2(a)系统相平面图(2)xxx112①x22xx②12由式①:x2x1x1③式③代入②:(x1x1)2x1(x1x1)即x12x1x10④令x1x10得平衡点:x e0由式④得特征方程及特征根为2.4142ss2101,2(鞍点)0.414画相轨迹,由④式xx 11 d x1dxx12x1x1x 1 x1 2计算列表322.53∞11.52=1/(-2)∞210-1-2∞用等倾斜线法绘制系统相平面图如图解7-2(b)所示。
第九章 非线性控制系统一、填空选择题(每题2分)1.非线性系统的稳定性与下列( D )因素有关。
A . 系统结构和参数B .初始条件C .输入信号大小D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。
A .系统结构和参数B .初始条件C .输入信号大小D .A 、B 、C 、3.非线性系统自持振荡中的振幅和频率是由-- 系统本身的特性-----决定的,4.相平面法适用于---一、二----阶非线性系统,描述函数法适用于—任意-----阶非线性系统。
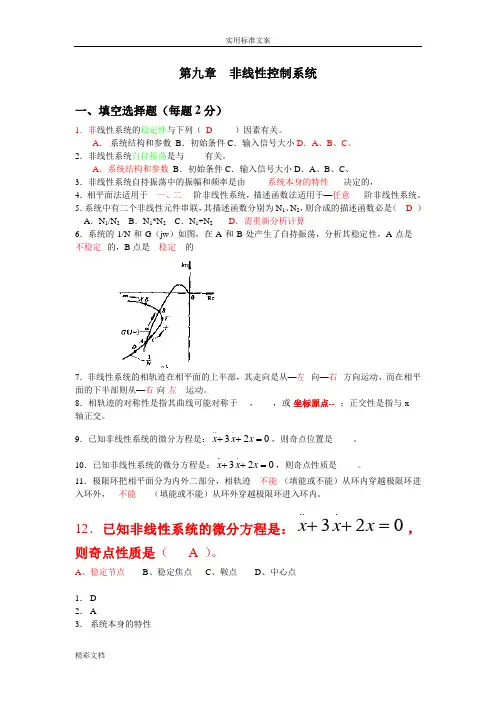
5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( D ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是---不稳定--的,B 点是---稳定---的7.非线性系统的相轨迹在相平面的上半部,其走向是从—左--向—右--方向运动,而在相平面的下半部则从—右-向-左---运动。
8.相轨迹的对称性是指其曲线可能对称于----,-----,或-坐标原点----;正交性是指与-x----轴正交。
9.已知非线性系统的微分方程是:023...=++x x x ,则奇点位置是-------。
10.已知非线性系统的微分方程是:023...=++x x x ,则奇点性质是-------。
11.极限环把相平面分为内外二部分,相轨迹---不能-(填能或不能)从环内穿越极限环进入环外,---不能-----(填能或不能)从环外穿越极限环进入环内。
12.已知非线性系统的微分方程是:023...=++x x x ,则奇点性质是( A )。
A 、稳定节点B 、稳定焦点C 、鞍点D 、中心点1. D 2. A3. 系统本身的特性4.一、二,任意5.D6.不稳定,稳定7.左,右,右,左8.X,.x,坐标原点,x9.坐标原点10.稳定节点11.不能12.A二、综合计算题a1.(12分)二阶阻尼系统:,试用等倾斜线法绘制系统相轨迹。
非线性系统理论1.1.非线性系统特点非线性系统与线性控制系统相比,具有一系列新的特点],线性系统满足叠加原理,而非线性控制系统不满足叠加原理。
图8-1带滤波器的非线性系统2•非线性系统的稳定性不仅取决于控制系统的固有结构和参数, 而且与系统的初始条件以及外加输入有关系。
例:对于一由非线性微分方程 X=-x(1 ―) 描述的非线性系统,显然有两个平衡点,即x 1=0和x 2=1。
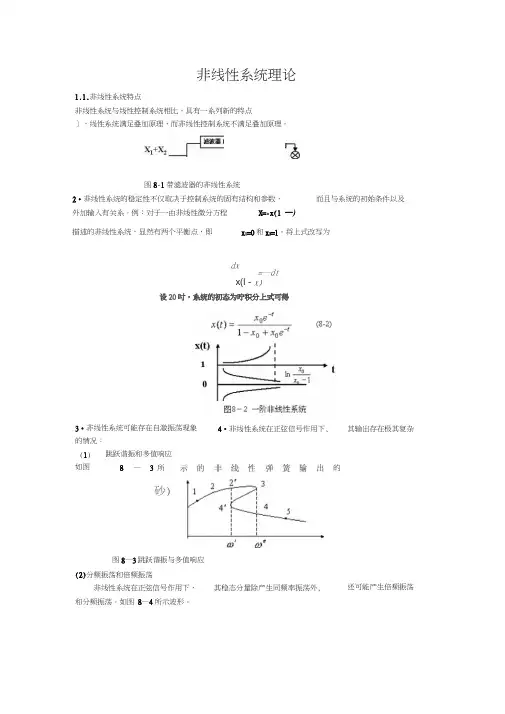
将上式改写为=—dt x(l - x)设20吋,系统的初态为咛积分上式可得dx3•非线性系统可能存在自激振荡现象 的情况: (1) 如图跳跃谐振和多值响应8 — 3 所砂)其输出存在极其复杂图8—3跳跃谐振与多值响应(2)分频振荡和倍频振荡非线性系统在正弦信号作用下, 其稳态分量除产生同频率振荡外,和分频振荡。
如图 8—4所示波形。
还可能产生倍频振荡4•非线性系统在正弦信号作用下, 的输入信号倍频信号分频信图8—4倍频撮荡与分频振荡8.1.2 研究非线性系统的意义与方法1•研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。
这些非线性因素的存在,使得我们用线性系统理论进行分析时所得出的结论,与实际系统的控制效果不一致。
线性系统理论无法解释非线性因素所产生的影响。
2)非线性特性的存在,并不总是对系统产生不良影响。
2•研究非线性系统的方法1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。
通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。
2)描述函数法是受线性系统频率法启发,而发展出的一种分析非线性系统的方法。
它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。
3)计算机求解法是利用计算机运算能力和高速度对非线性微分方程的一种数值解法。
8.2典型非线性特性的数学描述及其对系统性能的影响8.2.1饱和特性在电子放大器中常见的一种非线性,如图8-5所示,饱和装置的输入特性的数学描述如下:[辰。
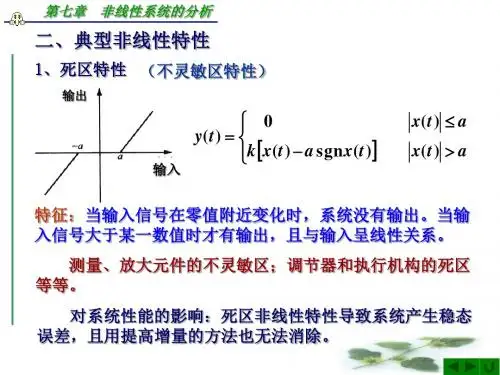
sig 滋(f)8.2.2死区特性死区特性也称为不灵敏区,如图8-6所示。
8-1考虑并回答下面的问题:(a )在确定非线性元件的描述函数时,要求非线性元件不是时间的函数,并要求有斜对称性,这是为什么?(b )什么样的非线性元件是无记忆的?什么样的非线性元件是有记忆的?它们的描述函数各有什么特点?(c )线性元件的传递函数与非线性元件的描述函数,有什么是相同的?有什么是不同的?线性元件可以有描述函数吗?非线性元件可以有传递函数吗?(d )非线性系统线性部分的频率特性曲线与非线性元件的负倒描述函数曲线相交时,系统一定能够产生稳定的自激振荡吗?8-2设非线性元件的输入、输出特性为35135()()()()y t b x t b x t b x t =++证明该非线性元件的描述函数为2413535()48N A b b A b A =++式中A 为非线性元件输入正弦信号的幅值。
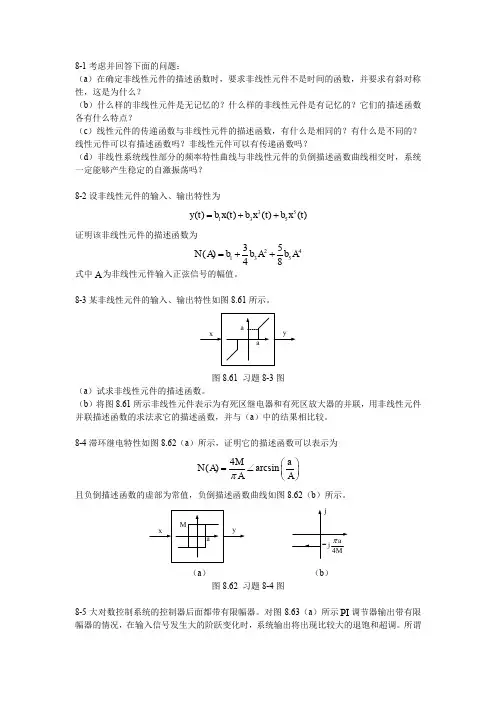
8-3某非线性元件的输入、输出特性如图8.61所示。
图8.61 习题8-3图(a )试求非线性元件的描述函数。
(b )将图8.61所示非线性元件表示为有死区继电器和有死区放大器的并联,用非线性元件并联描述函数的求法求它的描述函数,并与(a )中的结果相比较。
8-4滞环继电特性如图8.62(a )所示,证明它的描述函数可以表示为4()arcsin M a N A A A π⎛⎫=∠ ⎪⎝⎭且负倒描述函数的虚部为常值,负倒描述函数曲线如图8.62(b )所示。
(a ) (b )图8.62 习题8-4图8-5大对数控制系统的控制器后面都带有限幅器。
对图8.63(a )所示PI 调节器输出带有限幅器的情况,在输入信号发生大的阶跃变化时,系统输出将出现比较大的退饱和超调。
所谓退饱和超调是指,在大的误差信号e 作用下,PI 调节器的输出将很快将到达饱和值,经限幅器限幅后控制作用u 维持在最大值max u 。
在max u 的作用下,输出c 逐渐增大,误差e 逐渐减小,但只要误差未改变符号,PI 调节器的积分项就将继续增大,0e =时积分项的值一般要远大于限幅器的限幅值max u 。
第7章 非线性系统的分析1.试计算并绘制下列各微分方程的相平面图。
解:(1)求得运用积分法解得相轨迹方程为其相轨迹如图7-1所示。
(2)求得运用积分法解得相轨迹方程为其相轨迹如图7-2所示。
图7-1 系统的相轨迹 图7-2 系统的相轨迹(3)求得令切线斜率,则可得等倾线方程为,即可见等倾线为一簇水平线。
①当α=0时,,则该等倾线亦为一条相轨迹,因相轨迹互不相交,故其他相轨迹均以此线为渐近线。
②当α→∞时,,表明相轨迹垂直穿过x轴。
③当α→-1/T时,,说明相平面上下无穷远处的相轨迹斜率为-1/T。
最后根据等倾线作图法可得其概略相轨迹如图7-3所示。
图7-3 系统的概略相轨迹(4)求得令切线斜率,则可得等倾线方程为,即可见等倾线为一簇水平线。
①当α=0时,x=M,则该等倾线亦为一条相轨迹,因相轨迹互不相交,故其他相轨迹均以此线为渐近线。
②当α→∞时,,表明相轨迹垂直穿过x轴。
③当α→-1/T时,,说明相平面上下无穷远处的相轨迹斜率为-1/T。
最后根据等倾线作图法可得其概略相轨迹,如图7-4所示。
图7-4 系统的概略相轨迹(5)求得运用积分法可解得相轨迹方程为为一抛物线,其概略相轨迹如图7-5所示。
图7-5 系统的概略相轨迹(6)运用积分法可解得相轨迹方程为其中c为一常数,其相轨迹如图7-6所示。
图7-6 系统的相轨迹2.非线性控制系统结构图如图7-7所示,M =1。
要使系统产生振幅A=4,频率ω=1的自振运动,试确定参数K ,τ的值。
图7-7 系统结构图解:画出和G (jω)曲线如图8.7所示,当K 改变时,只影响自振振幅A ,不改变自振频率ω;而当τ≠0时,会使自振频率降低,幅值增加。
因此可以调节K ,τ大小实现要求的自振运动。
由自振条件N (A )G (jω)=-1即将ω=1代入上式可解得K =9.93,τ=0.322图7-8 和G (jω)曲线3.设继电型控制系统结构如图7-9所示,输入r (t )=R·1(t ),c (0)=0。
非线性系统的一般分析方法【课后自测】7-1 判断题7-31图中各系统是否稳定,)(1A N -与)(ωj G 两曲线交点是否为自振点。
图7-1 题7-1图解:(a )系统不稳定 曲线G(jw)与曲线()1N A -有交点a 、b 。
对于a 点,当A 增大时,()1N A -由G(jw)左侧稳定区进入右侧不稳定区,所以交点a 不是自振点。
对于b 点,当A 点增大时时,由G(jw)右侧不稳定区进入左侧稳定区,所以交点b 是稳定工作点,是自振点。
(b)系统不稳定 G(jw)曲线与()1N A -曲线有交点a 、b ,对于a 点,当A 增大时,()1N A -由G(jw)左侧稳定区进入右侧不稳定区,所以交点a 不是自振点。
对于b 点,当A 点增大时时,()1N A -由G(jw) 右侧不稳定区进入左侧稳定区,所以交点b 是自振点。
(c )()1N A -曲线被G(jw)曲线所包围,系统不稳定。
(d )系统不稳定 曲线G(jw)与曲线()1N A -曲线有一个交点,在交点处,当A 增大时,()1N A -由G(jw)右侧不稳定区进入左侧稳定区,所以交点是自振点。
(e )系统稳定(f )系统不稳定 G(jw)曲线与()-1N A 曲线有交点a 、b ,对于a 点,当A 增大时,()1N A -由G(jw)右不侧稳定区进入左侧稳定区,所以交点a 是自振点。
对于b 点,当A 点增大时时,()1N A -由G(jw) 右侧稳定区进入左侧不稳定区,所以交点b 不是自振点。
7-2 试求图7-32所示非线性特性的描述函数,画出-1/N 曲线,并指出X=0,X=1和X=∞时的-1/N 值。
图7-2 题7-2图解:由图可得非线性元件特性为1221()k xx a y k x k k ax a⎧≤⎪=⎨-->⎪⎩令sin x X t ω=,当x a ≥时,arcsin aa t Xω==1221sin 0()sin ()k X t t ay t k X t k k at aωωωω<<⎧=⎨-->⎩因()y t 是t 的奇函数,故10A =1212214()sin ()sin 2002()(arcsin )B y t td t y t td ta k X k k Xππωωωωπππ===+-⎰⎰ 所以11212()(arctan )2(arcsin )()AN X B ak k k XX a π==+-≥当X a <时,1sin y k X t ω=,02t πω<≤此时10A = 210221021011()sin 1sin 11cos 22B y t td t k X td t tk Xd t k xπππωωπωωπωωπ==-==⎰⎰⎰则1()N X k = ()X a <7-3 某单位反馈系统,其前向通道有一描述函数A eA N j/)(4π-=的非线性元件,线性部分的传递函数为)15.0(/15)(+=s s s G ,试用描述函数法确定系统是否存在自振?若有,参数是多少?解:非线性部分负倒数描述函数为:π-=-41()j Ae N A作()-1N A 和()G j ω曲线如图1所示。
非线性系统分析习题第2章2-1 电路如题图2-1所示,若11tanh 2u i =,22322i i +=ψ,33ln u q =,试讨论对下列各组变量:(1)2i 和3u ;(2)2i 和3q ;(3)2ψ和3u ;(4)2ψ和3q ;是否存在标准形式的状态方程?若存在,请导出该状态方程。
题图 2-12i 和3u 存在标准状态方程3233212222))2(tan (231dt u i dtdu u i u i i di s =--+=-2-2 题图2-2所示电路,非线性电阻的特性为:22223R R R u u i -=,试导出电路的状态方程。
题图 2-2L C C L C C L C L s C i LR u L u L dt di u u C i C du i C i C du 22122222211111)3(11dt 11dt --=--=-= 2-3 试确定下列函数是否满足全局Lipschitz 条件 (1)2211212()[2]T f x x x x x x =--可能不满足 (2)222112()[]x x T f x x e x e --=满足2-4 Van der pol 方程可以用状态方程描述为1222112(1)x x xx x x ε=⎧⎨=-+-⎩ 试证明,任取初始条件1020x x ,,对于某些充分小的δ,状态方程在[0]δ上有唯一解。
2-5 考虑标量微分方程0tan(()),(0)xx t x x ==试证明微分方程对于任意0x ,在区间[0,)∞上具有唯一解。
2-6 已知非线性系统的状态方程为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-t te x x x x x t dt dx dt dx 22212131213tanh 43试判断该状态方程是否有唯一解。
当00,0t t t ≥>时有唯一解 2-7 试求下列电路状态方程的平衡点。
(1)⎪⎪⎩⎪⎪⎨⎧+-=-=dxy by dt dy cxy ax dt dx (0,0) (2)⎪⎪⎩⎪⎪⎨⎧+-=++-=2222y x y x dt dy y x x y dtdx (0,0)(3)⎪⎪⎩⎪⎪⎨⎧-==3x x dt dy y dtdx(0,0);(1,0);(-1,0)(4)⎪⎪⎩⎪⎪⎨⎧-==1sin 2x dtdy y dtdx,2,1,0),1();k 1±±=-k k ππ,((5)⎪⎪⎩⎪⎪⎨⎧+-=-=+31dy by dtdy e dtdx yx (0,0);0,0db)d b,d b ();d b ,d b (≠>--d第3章3-1 分别取5.0=ε,2=ε,用等倾线法绘出范德坡方程的轨线。
第十章非线性系统§10.1 与线性系统的差异线性系统与非线性系统的不同之处在于:1. 非线性系统的运动是由一个非线性微分方程控制的,但是很多非线性方程都不存在精确解。
2. 一个非线性系统可能不只一个平衡点,而平衡点可能是稳定的,也可能是不稳定的。
3. 非线性系统是否存在稳态运动取决于初始条件。
4.非线性系统的自由振动周期由初始条件决定,这就意味着自由振动的频率依赖于自由振动的振幅。
5. 非线性系统的共振出现在激发频率不同于系统的线性固有频率处,在一个三维非线性系统中,当激发频率为系统线性固有频率的1/3时,产生超频共振;当激发频率为系统线性固有频率近三倍时,就产生亚频共振。
6. 线性叠加原理不能用来分析受多频激励的非线性系统,共振的组合是对应于激发频率的近似组合。
7. 对应于固有频率的近似组合,在多自由度的连续系统中存在内共振。
8. 在非线性系统中,周期激励可能会引起非周期响应,由于一些特定的参数值,这种混沌运动出现在很多非线性系统中。
§10.1 定性分析状态平面或相位平面是速度和位移在整个运动过程中的关系曲线,通过在平衡点的邻域内将控制微分方程线性化,可以检验平衡点的性质及其稳定性(见题10.2),平衡点的各种类型如图10.1所示。
§10.3 达芬方程达芬方程rt F sin 23=+++εχχχμχ(10.1) 是一个无量纲方程。
它作为一个模型可用于求解三维非线性系统。
如果ε为正,则表示一个硬弹簧的响应;如果ε为负,则表示一个软弹簧系统的响应。
一个系统自由振动的振幅关系由达芬方程决定,它可以用扰动方法近似表示为:)(83122εεωO A ++= (10.2)其中ω是固有频率的无量纲化(对于线性系统ω=1),A 是振幅,分析共振附近达芬方程的受迫响应可以设εσ+=1r (10.3)则稳态振幅的定义方程就可近似表示为22222]83[4F A A =⎪⎭⎫ ⎝⎛-+σμ (10.4)方程(10.4)在图10.2中的关系曲线表示为0>ε时中枢曲线和跳跃现象,对于给定的σ值,方程(10.4)有三个正实解,因为2A 引起了三种可能的稳态运动,中间解是不稳定的,引起跳跃现象。
非线性系统分析习题第2章2-1 电路如题图2-1所示,若11tanh 2u i =,22322i i +=ψ,33ln u q =,试讨论对下列各组变量:(1)2i 和3u ;(2)2i 和3q ;(3)2ψ和3u ;(4)2ψ和3q ;是否存在标准形式的状态方程?若存在,请导出该状态方程。
题图 2-12i 和3u 存在标准状态方程3233212222))2(tan (231dt u i dtdu u i u i i di s =--+=-2-2 题图2-2所示电路,非线性电阻的特性为:22223R R R u u i -=,试导出电路的状态方程。
题图 2-2L C C L C C L C L s C i LR u L u L dt di u u C i C du i C i C du 22122222211111)3(11dt 11dt --=--=-= 2-3 试确定下列函数是否满足全局Lipschitz 条件 (1)2211212()[2]T f x x x x x x =--可能不满足 (2)222112()[]x x T f x x e x e --=满足2-4 Van der pol 方程可以用状态方程描述为1222112(1)x x xx x x ε=⎧⎨=-+-⎩ 试证明,任取初始条件1020x x ,,对于某些充分小的δ,状态方程在[0]δ上有唯一解。
2-5 考虑标量微分方程0tan(()),(0)xx t x x ==试证明微分方程对于任意0x ,在区间[0,)∞上具有唯一解。
2-6 已知非线性系统的状态方程为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-t te x x x x x t dt dx dt dx 22212131213tanh 43试判断该状态方程是否有唯一解。
当00,0t t t ≥>时有唯一解 2-7 试求下列电路状态方程的平衡点。
(1)⎪⎪⎩⎪⎪⎨⎧+-=-=dxy by dt dy cxy ax dt dx (0,0) (2)⎪⎪⎩⎪⎪⎨⎧+-=++-=2222y x y x dt dy y x x y dtdx (0,0)(3)⎪⎪⎩⎪⎪⎨⎧-==3x x dt dy y dtdx(0,0);(1,0);(-1,0)(4)⎪⎪⎩⎪⎪⎨⎧-==1sin 2x dtdy y dtdx,2,1,0),1();k 1±±=-k k ππ,((5)⎪⎪⎩⎪⎪⎨⎧+-=-=+31dy by dtdy e dtdx yx (0,0);0,0db)d b,d b ();d b ,d b (≠>--d第3章3-1 分别取5.0=ε,2=ε,用等倾线法绘出范德坡方程的轨线。
设初值为:(1)3)0(,3)0(-==xx ;(2)1)0(,0)0(-==x x ;(3) 3)0(,3.2)0(=-=x x 。
3-2 用liénard 作图法绘出5.0=ε时,范德坡方程初值为3)0(,3)0(-==xx 的轨线。
3-3 试证明在ε<m 时,范德坡方程的等倾线包含3个分支。
3-4 试确定下列线性微分方程组奇点的类型,并定性作出相图。
(1)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 3212; 稳定结点 (2)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 2223;鞍点 (3)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 3212 ; 不稳定结点 (4)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 3001; 稳定结点 (5)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 3002; 鞍点 (6)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 1224; 非初等奇点,轨线趋于奇线 (7)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 2412; 非初等奇点,轨线平行于奇线(8)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 3002; 不稳定结点 (9)⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 0210; 中心 (10) ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡y x dt dy dt dx 1331 不稳定焦点 3-5 试求下列各非线性状态方程平衡点处的线性化系统,并决定该平衡点的类型。
(1)⎪⎪⎩⎪⎪⎨⎧+-=-=xy y dtdy xy x dtdx平衡点(0,0)⎪⎪⎩⎪⎪⎨⎧-==y dt dy x dt dx鞍点 (2)⎪⎪⎩⎪⎪⎨⎧+-=++-=2222y x y x dt dy y x x y dtdx平衡点(0,0)⎪⎪⎩⎪⎪⎨⎧=-=x dtdy y dt dx中心、焦点或中心焦点之一 (3)⎪⎪⎩⎪⎪⎨⎧-==3x x dtdy y dt dx 平衡点(0,0),⎪⎪⎩⎪⎪⎨⎧==xdt dy y dt dx 鞍点(1,0),(-1,0)⎪⎪⎩⎪⎪⎨⎧∆-=∆∆=∆x dty d y dt xd 中心、焦点或中心焦点之一 (4)⎪⎪⎩⎪⎪⎨⎧+=-=+21y y dtdy e dt dx y x 平衡点(0,0)⎪⎪⎩⎪⎪⎨⎧=+=y dt dy y x dt dx 不稳定退化结点3-6 考察下列非线性系统是否存在极限环,如存在极限环,通过极坐标变换来判断极限环的稳定性。
(1)22121122221212(1)(1)x x x x x xx x x x ⎧=+--⎪⎨=-+--⎪⎩ 2(1)1rr r θ⎧=-⎪⎨=-⎪⎩ ,存在稳定的极限环1=r (2)22121122212222121222121(1)sin()11(1)sin()1x x x x x x x x x x x x x x ⎧=---⎪+-⎪⎨⎪=----⎪+-⎩11sin )1(22---=r r r r 存在半稳定的极限环(3) 2112211,xx x x x =-=不存在极限环 (4)12121cos(),sin x x x x x == 不存在第4章4-1 试对二阶自治系统的各类平衡点,按Lyapunov 稳定性的定义对平衡点的稳定性类型进行分类。
4-2 试判断下面的每一个函数是否为:(1)局部正定函数;(2)正定函数;(3)半正定函数;(4)不定函数。
(1)421212(,)V x x x x =+; 正定函数(2)22212112(,)2V x x x x x =-;局部正定函数(2< (3)221212(,)sin()V x x x x =+; 局部正定函数22120x x π≤+<()(4)221212212(,)1+x x V x x x +=;正定函数(5)12122(,)xV x x x e = 半正定函数4-3 试讨论下列系统原点的稳定性,指出它们是否稳定;如果稳定,是否全局的。
(1)222111,x xx x x x -=+-= ;局部渐近稳定 (2))1(),1(22212122221121x x x x xx x x x x---=----= ;局部渐近稳定(设222121),(x x x x V +=)(3))3(cos )(sin -28275x x x x x x x=++ ;不稳定,利用首次近似 (4))1(,sin 222111t x xt x x x+-=--= ; 4-4 考虑系统3221222112,2x x x xx x x+=+-= 预选V 函数为222121),(x x x x V -=,证明平衡点(0,0)是不稳定的。
4-5 某非线性电路的状态方程为212231113,x x xx x x x -=+-= (1) 求系统的所有平衡点;(0,0),(2,6)(-2,-6)(2) 通过平衡点处的线性化系统研究所有平衡点处的局部稳定性;(0,0)不稳定;(2,6),稳定;(-2,-6);稳定(3) 利用二次Lyapunov 函数,估计每个渐近稳定的平衡点的吸引域,并尽可能极大化吸引域(提示:对每个渐近稳定的平衡点,将坐标原点平移到平衡点处,然后进行分析);(4) 绘出系统的相轨迹和前列分析对比。
4-6 试证明:如果存在对称矩阵P 和Q 使得Q P PA P A T-=++λ2则A 的所有特征值的实部均小于λ-。
4-7 考虑一个二阶系统⎩⎨⎧+-=++=u x x x u x sat x x x 21222211sin )2(-3其中sat 函数定义为⎪⎩⎪⎨⎧><=1)(1)(σσσσσsign sat当0=u 时,试采用平衡点(0,0)处的线性化系统证明系统是局部不稳定的; 4-8 通信网络锁相环回路方程可描述为[c o s ()]s i n ()y a b y y c y +++= (1) 取12=,x y x y= ,试导出状态方程; (2) 设0c >,取预选Lyapunov 函数为22121(,)(1cos )2x V x x c x =-+,证明:如果0a b ≥≥,平衡点(0,0)是稳定的;如果0a b >≥,平衡点(0,0)是渐近稳定的(提示:应用Lasalle 定理)。