自动控制原理(第三版)第二章答案 华南理工出版社 彭康拥 陈来好
- 格式:ppt
- 大小:3.11 MB
- 文档页数:141
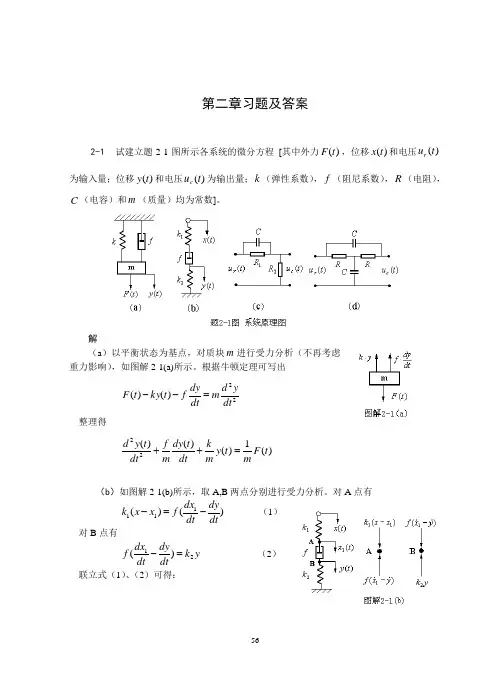
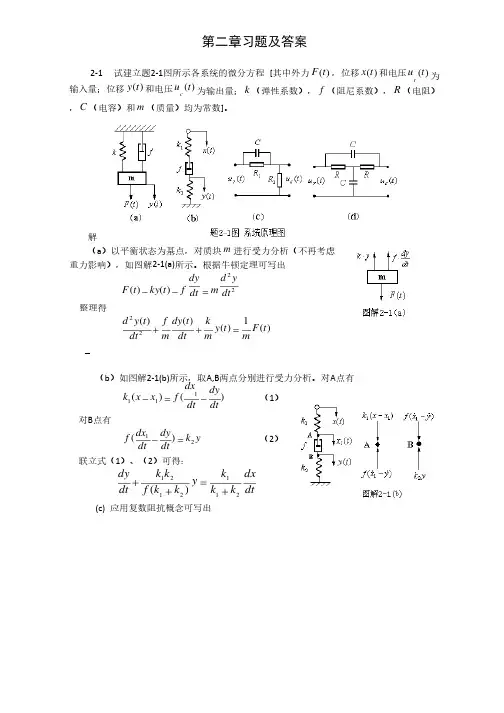
第二章习题及答案2-1 试建立题2-1图所示各系统的微分方程 [其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dtyd m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I csR cs R s U c r ++= (3) 2)()(R s Uc s I =(4) 联立式(3)、(4),可解得:CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为:r r c c u CR dt du u R CR R R dt du 121211+=++ (d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++ 2-2 试证明题2-2图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。

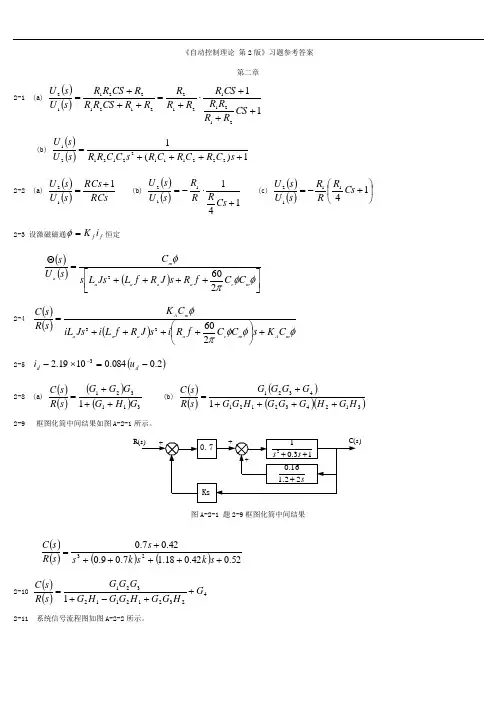
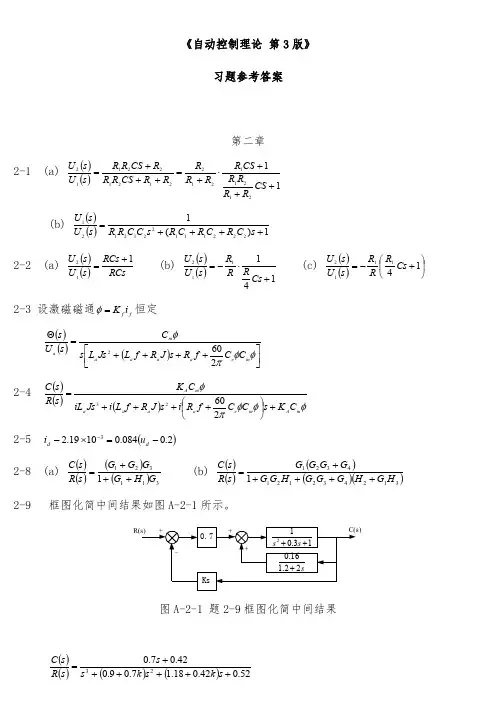
《自动控制原理(第3版)》部分习题答案第2章C2-1(a)21211()(1)()()(1)R sL R Cs G s R sL R Cs R ++=+++C2-221114232233342526()()(1)(1)()()()()()()()()()()()()()m a a a a a e ma a L a a a a e mffRG s K R R G s R Cs K T s R G s K c s G s U s JL s L f JR s fR c c L s R s G s M s JL s L f JR s fR c c U s G s K s =-=-=-+=-+=-Ω==++++-+Ω==++++==Ω123412346512346()()()()()()1()()()()()()()()1()()()()()r L G s G s G s G s s U s G s G s G s G s G s G s s M s G s G s G s G s G s Ω=+Ω=+C2-4(a)3123123()()()R LsG s R R R Ls R R R =++++C2-4(b)323123()()()R LsG s R R Ls R R R =+++C2-5321122211212311(1)(1)(),(),(),()()1a b c d R Cs R Cs R C s R C s RG s RCs G s G s G s R CsR C sR R R Cs ++++=-=-=-=-++C2-6 12314512123214342123312341232233344()()()()()()()1()()()()()()()()()()()()()()()()()()()()1()()()()()()()()()()a b G s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s +=++++++=+++-12341()()()()()G s G s G s G s H sC2-7 13241761113241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ 283261213241762851324()()()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s+=+++++ 24132852213241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++17413152113241762851324()()()[1()()]()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ C2-812341123243123312312()()()()()1()()()()()()()()()()()()()()()()G s G s G s G s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s H s H s +=+++++C2-912345214561111452145145124561112322()()()[1()()()]()()()()()()()1()()()()()()()()()()()()()()()()[1()()]()()(()()()G s G s G s G s G s H s G s G s G s G s C s s R s G s H s G s G s H s G s G s G s G s G s G s H s H s G s G s G s G s H s G s G s G C s s R s --Φ==+-+-++Φ==4511452145145121122)()()1()()()()()()()()()()()()()()()()()()s G s G s G s H s G s G s H s G s G s G s G s G s G s H s H s C s s R s s R s +-+-=Φ+Φ C2-1013453564256313421356253431342535643535123561434523345624()()[1()()]()[1()()]()()1()()()()()()()()()a G s G G G s G H s G G H s G G G s G H s G G H s G G G G s G G G G s G H s G G H s G H s G G H s G G s G G H H s G G G H H s G G G H H s G G G G H H s =++++++-+++++++++12353241212131223123()()()()()[1()]()[1()()2()()]()1()()2()()()()2()()()b G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++++++=+++++第3章C3-1 221()TsTsK e Tse G s Ts ----=C3-2 220.910()1110ss s s s ++Φ=++ C3-3105050()10.283sin(545)()1 1.4sin(545)t t tc t e e t c t et ---=--+=-+精近C3-422*0.23()(0.5)2*0.23()0.50.23G s s s s s s =+Φ=++C3-51212T T bK T T ε+<<C3-6 阶跃信号作用下稳态误差为零,要求n m a b =加速度信号作用下稳态误差为零,要求1122,,n m n m n m a b a b a b ----=== C3-7 21()(1)c sG s K T s =+C3-8 24()(46)G s s s s =++C3-9 250()(1225)G s s s s =++C3-100.243τ=C3-11 (1)06,(2)303,(4)010/3K K K <<<<<<结构不稳()C3-12 (1)015,(2)0.72 6.24K K <<<< C3-13(1)(2)34系统稳定系统不稳定,有两个右根,()系统稳定()系统不稳定,有三个右根C3-14 3,5K ω== C3-1533231()()1()()()()()n r G s G s G s H s G s G s G s =-+=第4章C4-1 图略图略C4-2 (1)图略图略(2) 2233()24x y ++=C4-3 (1)图略图略(2) 0.40.5K << C4-4 分会点和渐近线分会点和渐近线123-6+)(2)(18)=0,,=,42,22a a a a a d d d a πδϕ±---+==±( 12320,2a d d d ====-(1)(1)当当时,图略图略123180,6a d d d ====-(2)(2)当当时,图略图略 120,0a a d σ<=>(3)(3)当当0<时,图略图略1180,0a a d δ<=<(4)(4)当当2<时,图略图略12318,,0a a d d d δ><(5)(5)当当时,三个不同实数分会点,图略图略C4-5(1) 图略,原系统不稳定; (2)增加零点且选择合适位置,可是系统稳定,零点05z <<C4-6图略,系统稳定34K > C4-7 (1) 图略图略(2)当0.8629.14K <<,系统为欠阻尼状态,且 1.87K =阻尼比最小,系统地闭环极点为3 2.8j -±(3)试探求得试探求得 2,4 2.8K j =-±闭环极点, 1.06,0.75~1P s M t ==C4-8 (1)等效开环传递函数为: (1)()(2)K s G s s s --=+正反馈系统根轨迹, 图略图略 (2)系统稳定02K << (3) 2,2K ω==C4-9等效开环传递函数为: 22()===10)(44)(4410)KaK G s K a s s s K s s s ''++++等(,图略图略C4-10(1) 图略图略 (2) 64,12K ω== (3)1,20.5,13s j ζ==-±C4-11(1) 图略图略 (2) 不在根轨迹上; (3) ()1cos 4c t t =-C4-12等效开环传递函数为: 322()=(4416)(4)(4)KKG s s s s s s s s =+++++等,K=8时试探求特征根.第5章C5-1(1)C5-1(2)C5-1(3)C5-1(4)C5-200000(1)()0.83sin(30 4.76)(2)()0.83sin( 4.76) 1.64cos(2459.46)c t t c t t t =+-=----C5-3当12T T <,系统稳定系统稳定当12T T >,系统不稳定. C5-4 2100()10100G s s s =++C5-5(a) 0110(1)300(),4111(1)(1)510s G s s s γ+==++ (b) 00.1(),2581(1)50s G s s γ==+ (c) 032(),141(1)2G s s s γ==+ (d) 025(), 1.66(1001)(0.11)G s s s s γ==-++(e) 020.5(21)(),36.8(0.51)s G s s s γ+==+(f) 0231.62(),9.860.010.0981G s s s γ==++C5-6 (1) K=1(2)K=25(3)K=2.56(或精确求K=3.1) C5-7()()()a g i 稳定,稳定,(b)(b)(b)不稳定,不稳定,不稳定,(c)(c)(c)稳定,稳定,稳定,(d)(d)(d)稳定,稳定,稳定,(e)(e)(e)不稳定,不稳定,(f)(f)稳定,稳定,不稳定,不稳定,(h)(h)(h)不稳定,不稳定,不稳定,不稳定,(j)(j)(j)不稳定,不稳定,C5-8 102510000K K <<<和 C5-9(1)(2)闭环系统稳定;)闭环系统稳定; (3)078.5,g K γ==∞(4)K 增大10倍,对数幅值上升,但相频特性不变,系统的快速性提高,平稳性降低,系统地抗干扰性降低。
第二章习题及答案2-1试建立题2-1图所示各系统的微分方程[其中外力)(t F ,位移)(tx 和电压)(t u r为输入量;位移)(t y 和电压)(t u c为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dt yd m dt dy f t ky t F =--整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++—(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有)()(111dtdydtdxf x x k -=-(1)对B 点有y k dtdydt dx f 21)(=-(2)联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I csR cs Rs U c r ++=(3)`2)()(Rs Uc s I =(4)联立式(3)、(4),可解得:),可解得: Cs R R R R Cs R R s U s U r c 212112)1()()(+++= 微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++ (d) 由图解2-1(d )可写出)可写出[]Cs s I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Css I c R c -= (6)[]Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c |微分方程为微分方程为 rr r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明题2-2图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
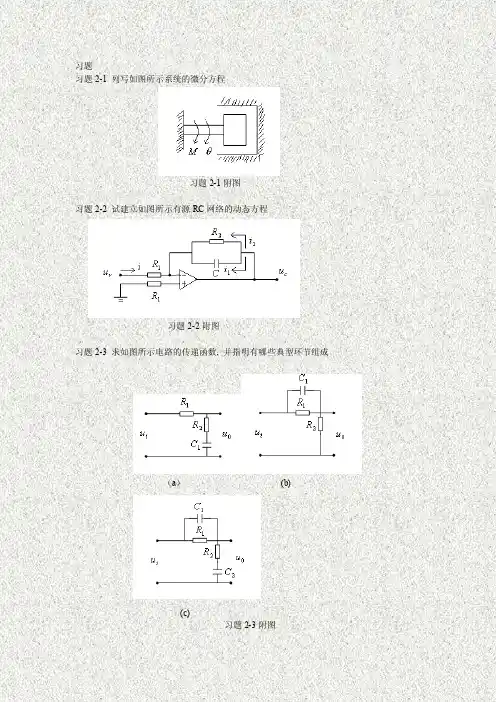
习题习题2-1 列写如图所示系统的微分方程习题2-1附图习题2-2 试建立如图所示有源RC网络的动态方程习题2-2附图习题2-3 求如图所示电路的传递函数, 并指明有哪些典型环节组成(a)(b)(c)习题2-3附图习题2-4 简化如图所示方块图, 并求出系统传递函数习题2-4附图习题2-5 绘制如下方块图的等效信号流图, 并求传递函数图(a)图(b)习题2-5附图习题2-6 系统微分方程组如下, 试建立对应信号流图, 并求传递函数。
),(d )(d )(),(d )(d ),()()()(),()(),(d )(d )(),()()(54435553422311121t y tt y T t x k t x k tt x t y k t x t x t x t x k t x t x k tt x t x t y t r t x +==--==+=-=τ习题2-7 利用梅逊公式直接求传递函数。
习题2-7附图习题2-8 求如图所示闭环传递函数, 并求(b)中)(s H x 的表达式, 使其与(a)等效。
图(a )图(b)习题2-8附图习题2-9 求如下各图的传递函数(a)(b)(c)习题2-9附图习题2-10 已知某些系统信号流图如图所示, 求对应方块图(a )(b)(c)(d)习题2-10附图习题答案习题2-1答案:解:设外加转矩M 为输入量,转角θ为输出量,转动惯量J 代表惯性负载,根据牛顿定律可得:θθθ1122d d d d k t f M tJ --=式中,1,1,k f 分别为粘性阻尼系数和扭转弹性系数,整理得:M k t f tJ =++θθθ1122d d d d习题2-2答案:解: 设r u 为输入量,c u 为输出量,,,,21i i i 为中间变量,根据运算放大器原理可得:1221d d R u i R u i t u c i r c c ===消去中间变量可得: r c c u R Ru t u C R 122d d -=+ 习题2-3答案: 解: (a)11111111221212211121121120++=+++=+++=+++=Ts Ts s R R R C R s C R R sC R sC R sC sC R R sC R u u i β其中:221121,R R R C R T +==β, 一阶微分环节,惯性环节.(b)21121212111221122011//1R R s C R R R s C R R R sC R R R sC R R u u i+++=++=+= 11111111212121221121111++=+∙++∙+=+++=Ts Ts s C R R R R s C R R R R R R s C R R s C R αα其中 α=+=21211,R R R T C R , 一阶微分环节,惯性环节.(c)s C R s C R s C R s C R s C R sC R R sC sC R u u i 21221122112211220)1)(1()1)(1(1//11+++++=+++= 由微分环节,二阶振荡环节组成。

自动控制原理第二章到第七章课后习题答案第二章2-1试求下图所示电路的微分方程和传递函数。
解:(a )根据电路定律,列写出方程组:001Li R c L R C di L u u dtu R i i dt Ci i i ⋅+==⋅==+⎰消除中间变量可得微分方程:20002i d u du L L C u u dt R dt⋅⋅+⋅+=对上式两边取拉氏变换得:2000()()()()i LL C U s s U s s U s U s R⋅⋅⋅+⋅⋅+= 传递函数为022()1()()1i U s R G s L U s R Ls LCRs s LCs R ===++++ (b )根据电路定律,列写出方程组:12011()i i u i R R idt C u u i R =++-=⎰消除中间变量可得微分方程:121012i R R Ru u idt R R C+=-⎰ 对上式两边取拉氏变换得:2012()(1)()(1)i U s R Cs U s R Cs R Cs +=++传递函数为0212()1()()1i U s R CsG s U s R Cs R Cs+==++2-3求下图所示运算放大器构成的电路的传递函数。
解:(a )由图(a ),利用等效复数阻抗的方法得22111(s)1(s)()1o i R U R Cs Cs G U s R R Cs ++==-=-+(b )由图(b ),利用等效复数阻抗的方法得222121211221211111(s)()1(s)1()1o i R U C s R R C C s R C R C s G U s R C s R C s R C s++++==-=-+2-5试简化下图中各系统结构图,并求传递函数()()C s R s 。
2-6试求下图所示系统的传递函数11()()C s R s ,21()()C s R s ,12()()C s R s 及22()()C s R s 。

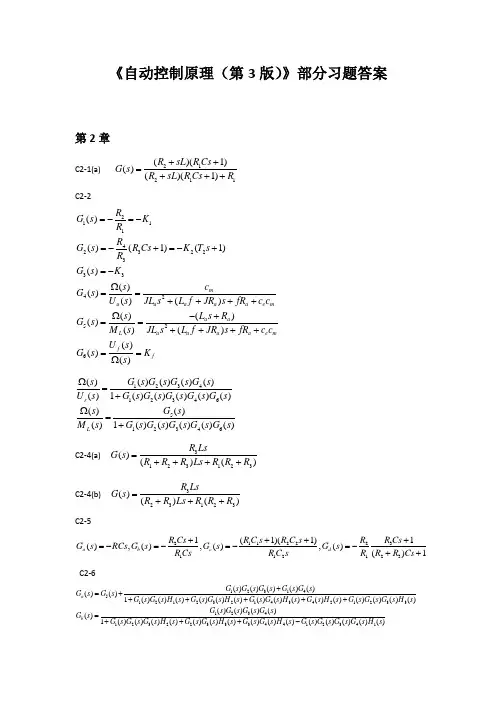
《自动控制原理(第3版)》部分习题答案第2章C2-1(a) 21211()(1)()()(1)R sL R Cs G s R sL R Cs R ++=+++C2-221114232233342526()()(1)(1)()()()()()()()()()()()()()m a a a a a e ma a L a a a a e m f fR G s K R R G s R Cs K T s R G s K c s G s U s JL s L f JR s fR c c L s R s G s M s JL s L f JR s fR c c U s G s K s =-=-=-+=-+=-Ω==++++-+Ω==++++==Ω 123412346512346()()()()()()1()()()()()()()()1()()()()()r L G s G s G s G s s U s G s G s G s G s G s G s s M s G s G s G s G s G s Ω=+Ω=+C2-4(a) 3123123()()()R LsG s R R R Ls R R R =++++C2-4(b) 323123()()()R LsG s R R Ls R R R =+++C2-5321122211212311(1)(1)(),(),(),()()1a b c d R Cs R Cs R C s R C s RG s RCs G s G s G s R Cs R C s R R R Cs ++++=-=-=-=-++ C2-612314512123214342123312341232233344()()()()()()()1()()()()()()()()()()()()()()()()()()()()1()()()()()()()()()()a b G s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s +=++++++=+++-12341()()()()()G s G s G s G s H sC2-713241761113241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ 283261213241762851324()()()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +=+++++ 24132852213241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ 17413152113241762851324()()()[1()()]()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ C2-812341123243123312312()()()()()1()()()()()()()()()()()()()()()()G s G s G s G s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s H s H s +=+++++C2-9 12345214561111452145145124561112322()()()[1()()()]()()()()()()()1()()()()()()()()()()()()()()()()[1()()]()()(()()()G s G s G s G s G s H s G s G s G s G s C s s R s G s H s G s G s H s G s G s G s G s G s G s H s H s G s G s G s G s H s G s G s G C s s R s --Φ==+-+-++Φ==4511452145145121122)()()1()()()()()()()()()()()()()()()()()()s G s G s G s H s G s G s H s G s G s G s G s G s G s H s H s C s s R s s R s +-+-=Φ+Φ C2-1013453564256313421356253431342535643535123561434523345624()()[1()()]()[1()()]()()1()()()()()()()()()a G s G G G s G H s G G H s G G G s G H s G G H s G G G G s G G G G s G H s G G H s G H s G G H s G G s G G H H s G G G H H s G G G H H s G G G G H H s =++++++-+++++++++12353241212131223123()()()()()[1()]()[1()()2()()]()1()()2()()()()2()()()b G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++++++=+++++第3章C3-1 21()Ts TsK e Tse G s T s ----=C3-2 220.910()1110s s s s s ++Φ=++C3-3105050()10.283sin(545)()1 1.4sin(545)t t tc t e e t c t et ---=--+=-+精近C3-422*0.23()(0.5)2*0.23()0.50.23G s s s s s s =+Φ=++C3-51212T T bK T T ε+<<C3-6 阶跃信号作用下稳态误差为零,要求n m a b =加速度信号作用下稳态误差为零,要求1122,,n m n m n m a b a b a b ----=== C3-7 21()(1)c sG s K T s =+C3-8 24()(46)G s s s s =++C3-9 250()(1225)G s s s s =++ C3-100.243τ=C3-11 (1)06,(2)303,(4)010/3K K K <<<<<<结构不稳()C3-12 (1)015,(2)0.72 6.24K K <<<< C3-13(1)(2)34系统稳定系统不稳定,有两个右根,()系统稳定()系统不稳定,有三个右根C3-14 3,K ω==C3-1533231()()1()()()()()n r G s G s G s H s G s G s G s =-+=第4章C4-1 图略C4-2 (1)图略 (2) 2233()24x y ++=C4-3 (1)图略 (2) 0.40.5K <<C4-4 分会点和渐近线123=0,,2,22a a d d d a πδϕ-+==±12320,2a d d d ====-(1)当时,图略 123180,6a d d d ====-(2)当时,图略 120,0a a d σ<=>(3)当0<时,图略 1180,0a a d δ<=<(4)当2<时,图略12318,,0a a d d d δ><(5)当时,三个不同实数分会点,图略C4-5(1) 图略,原系统不稳定;(2)增加零点且选择合适位置,可是系统稳定,零点05z << C4-6图略,系统稳定34K > C4-7 (1) 图略(2)当0.8629.14K <<,系统为欠阻尼状态,且 1.87K =阻尼比最小,系统地闭环极点为3 2.8j -±(3)试探求得 2,4 2.8K j =-±闭环极点, 1.06,0.75~1P s M t == C4-8 (1)等效开环传递函数为: (1)()(2)K s G s s s --=+正反馈系统根轨迹, 图略(2)系统稳定02K <<(3) 2,K ω==C4-9等效开环传递函数为: 22()===10)(44)(4410)Ka K G s K a s s s K s s s ''++++等(,图略 C4-10(1) 图略(2) 64,K ω==(3)1,20.5,1s ζ==-±C4-11(1) 图略 (2) 不在根轨迹上; (3) ()1cos 4c t t =-C4-12等效开环传递函数为: 322()=(4416)(4)(4)K KG s s s s s s s s =+++++等,K=8时试探求第5章C5-1(1)C5-1(2)C5-1(3)C5-2000(1)()0.83sin(30 4.76)(2)()0.83sin( 4.76) 1.64cos(2459.46)c t t c t t t =+-=----C5-3当12T T <,系统稳定当12T T >,系统不稳定. C5-4 2100()10100G s s s =++ C5-5(a) 0110(1)300(),4111(1)(1)510s G s s s γ+==++ (b) 00.1(),2581(1)50sG s s γ==+(c) 032(),141(1)2G s s s γ==+(d) 025(), 1.66(1001)(0.11)G s s s s γ==-++(e) 020.5(21)(),36.8(0.51)s G s s s γ+==+ (f) 0231.62(),9.860.010.0981G s s s γ==++ C5-6 (1) K=1(2)K=25(3)K=2.56(或精确求K=3.1) C5-7()()()a g i 稳定,(b)不稳定,(c)稳定,(d)稳定,(e)不稳定,(f)稳定,不稳定,(h)不稳定,不稳定,(j)不稳定,C5-8 102510000K K <<<和 C5-9(1)(2)闭环系统稳定; (3)078.5,g K γ==∞(4)K 增大10倍,对数幅值上升,但相频特性不变,系统的快速性提高,平稳性降低,系统地抗干扰性降低。
自动控制原理第二章课后习题答案(免费)自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换(1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim lim t z z z z f t z E z z z →∞→→-=-==--2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a=证明:()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
自动控制原理第三版课后答案王艳东1、农民伯伯为作物补充含氮、磷、钾等元素的养料,是为了帮助作物补充()。
[单选题] *A.水分B.维生素C.无机盐(正确答案)2、公安机关可以利用( )侦破各种案件。
[单选题] *A.人遗传物质的独一无二B.人指纹的独一无二C.两者都可以(正确答案)3、瓶子里养几只金鱼,就是一个简易的生态瓶。
[判断题] *对错(正确答案)4、(黄冈市)下列发明创造与仿生学无关的是()。
[单选题] *A.锯子B.显微镜(正确答案)C.迷彩服5、下列( )不属于房屋的结构。
[单选题] *A.电视机、沙发(正确答案)B.门、窗C.承重墙体、楼板6、透过透镜看到的面积或区域叫作透镜的视野。
( ) [单选题]对(正确答案)错7、采取以下()方法不能使我们的船装载得更多。
[单选题] *A.增大船舱的体积B.把船分割成几个船舱C.选用最贵的材料(正确答案)8、浮的材料可以用来造船,沉的材料不能用来造船。
[判断题] *对错(正确答案)9、蜡烛燃烧发生的变化属于( )。
[单选题] *A.物理变化B.化学变化C.物理变化和化学变化(正确答案)10、在同一天内,探探第一次测得阳光下竹竿影长为300厘米,一小时后,测得的影长为200厘米,她两次测量竹竿影长的时间可能是()。
[单选题] *A.上午(正确答案)B.下午C.傍晚11、鸡蛋握在手中不易损坏是因为( )。
[单选题] *A.鸡蛋壳是球形的薄壳结构(正确答案)B.鸡蛋壳很厚C.鸡蛋壳内部是空心的12、下列没有利用光的反射原理的是()。
[单选题] *A.利用潜望镜看到水面上的事物B.利用倒车镜可以看到后面的路况C.利用激光给隧道准直(正确答案)13、放大镜的特点是透明,中间薄边缘厚。
( ) [单选题]对错(正确答案)14、下列说法正确的是( ) 。
[单选题] *A.种子只有在土壤里才能发芽B.种子发芽一定要有阳光C.种子发芽必须要有水(正确答案)15、(郑东新区)在垃圾清理中,可以利用电磁起重机拣出垃圾中的一部分铁质物品,为了方便快速地让铁质物品从电磁起重机上落进卡车车厢里,科学的方法是()[单选题] *A.减小电磁铁线圈中的电流B.切断电磁铁的电源(正确答案)C.在卡车车厢里安装一个大磁铁16、白糖、碱、明矾、玻璃都是晶体。
自动控制原理课后习题答案第二章2.1 试分别写出图2.68中各无源电路的输入u r(t)与输出u c(t)之间的微分方程。
图2.68 习题2.1图解:(a)11r cu uiR-=,2()r cC u u i-=&&,122cui iR+=,12122121212c c r rR R R R RCu u Cu uR R R R R R+=++++&&(b)11()r cC u u i-=&&,121ru uiR-=,1221i i C u+=&,121cu i R u=+,121211122112121121()()c c c r r rR R C C u R C R C R C u u R R C C u R C R C u u++++=+++&&&&&&(c)11r cu uiR-=,112()rC u u i-=,1122ui iR+=,1121cu i dt uC=+⎰,121212222112122221()()c c c r r rR R C C u R C R C R C u u R R C C u R C R C u u++++=+++&&&&&&2.2 试证明图2.69(a)所示电路与图2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中X r(t)为输入,X c(t)为输出,均是位移量。
(a) (b)图2.69 习题2.2图解:(a)11r cu uiR-=,12()r cC u u i-=&&,12i i i+=,221cu idt iRC=+⎰,121211122212121122()()c c c r r rR R C C u R C R C R C u u R R C C u R C R C u u++++=+++&&&&&&(b)2121()cB x x K x-=&&,1121()()()r c r c cB x x K x x B x x-+-=-&&&&,121221212121211212()()c c c r r rB B B B B B B B Bx x x x x xK K K K K K K K K++++=+++&&&&&&2.3 试分别求出图2.70中各有源电路的输入u r (t )与输出u c (t )之间的微分方程。
第二章 控制系统的数学模型2-2 试求图示两极RC 网络的传递函数U c (S )/U r (S )。
该网络是否等效于两个RC 网络的串联?()r U s ()c U s R +-+-()a 11c s21c sR ()r U s ()c U s R +-+-()a 11c s21c sR 1()U s --1()U s解答:221221221212111222222121221.1111112211111()111()1()111()()1()111()()()()()11(),,1()1()1()()()c r c c c r r r R C S C S R u s C S C S C S a u s R R C C S R C R C R C S R R C S C S C SR R C S C S u s u s u s u s C S u s b u s R C S u s R C S u s u s u s R C S+++=∙=+++++++++====⨯=+++11221111R C S R C S ⨯++2121211221()1R R C C S R C R C S =+++ 故所给网络与两个RC 网络的串联不等效。
2-4 某可控硅整流器的输出电压U d =KU 2Φcos α式中K 为常数,U 2Φ为整流变压器副边相电压有效值,α为可控硅的控制角,设在α在α0附近作微小变化,试将U d 与α的线性化。
解答:.202002020cos (sin )()...sin sin )d u ku ku ku ku φφφφαααααααα=--+∆=-⋅∆=-d d 线性化方程:u 即u (2-9系统的微分方程组为12112323223()()()()()()()()()()()()x t r t c t dx t T K t x t dtx t x t K c t dc t T c t K x t dt =-=-=-+=式中1T 、2T 、1K 、2K 、3K 均为正的常数,系统地输入量为()r t ,输出量为()c t ,试画出动态结构图,并求出传递函数()()C s R s 。
主要学校自动控制原理考研教材
1、华南理工大学
《自动控制原理》高国燊、余文烋编,华南理工大学出版社2005年第二版;《自动控制原理学习指导与精选题型详解》陈来好、彭康拥编,华南理工大学出版社2004年1月;《现代控制理论》(第二版)刘豹主编,机械工业出版社或《线性系统理论基础》尤昌德编,电子工业出版社
2、华中科技大学
胡寿松主编《自动控制原理》,国防工业出版社
3、北京工业大学
孙亮,杨鹏.《自动控制原理》.北京工业大学出版社,2006.
4、电子科技大学
李友善主编《自动控制原理》,国防工业出版社
5、哈尔滨工业大学
1)801控制原理
2)807控制理论
《自动控制原理》鄢景华哈工大出版社
《自动控制原理》胡寿松国防工业出版社
6、重庆大学
1)839自动控制原理一(控制理论与控制工程专业)
《自动控制原理》学校自编教材或梅晓榕主编《自动控制原理》科学出版社出版2004年3月1日出版
2)844自动控制原理二(电气工程、控制科学与工程专业)
《自动控制原理》涂植英主编重庆大学出版社《自动控制原理》胡寿松主编科学出版社(第四版)
7、华东理工大学
8、长沙理工大学
《自动控制原理》,李益华主编,湖南大学出版社,2010年《现代控制理论》,黄辉先主编,湖南大学出版社,2006年
9、广东工业大学
胡寿松,自动控制原理,科学出版社,2002。