自动控制原理第2章习题解
- 格式:doc
- 大小:460.00 KB
- 文档页数:11
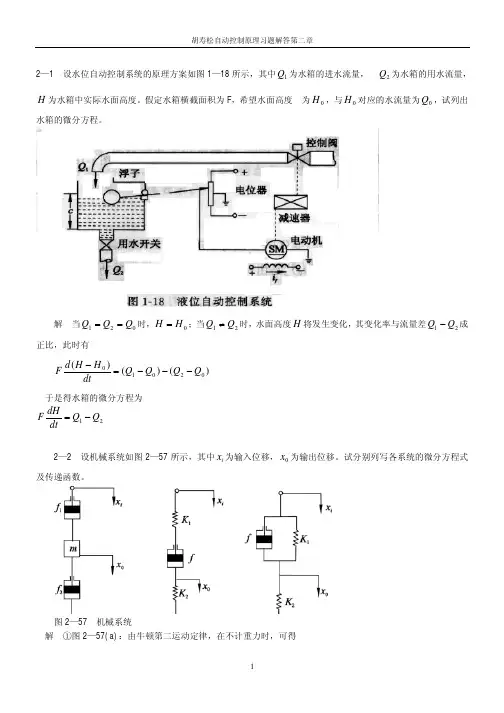
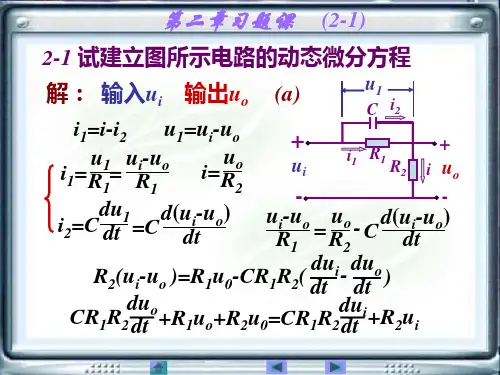
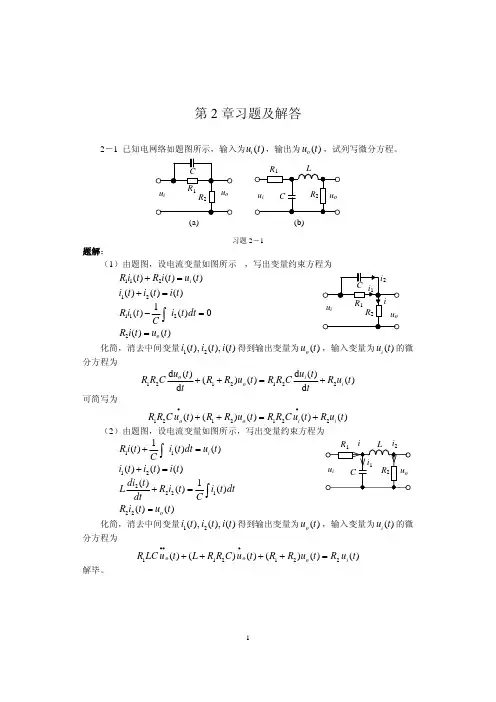
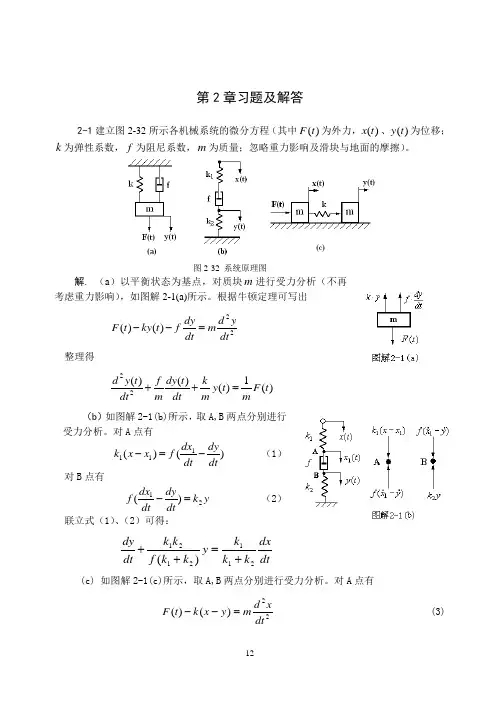
第二章 习题解答2-1试求下列各函数的拉氏变换。
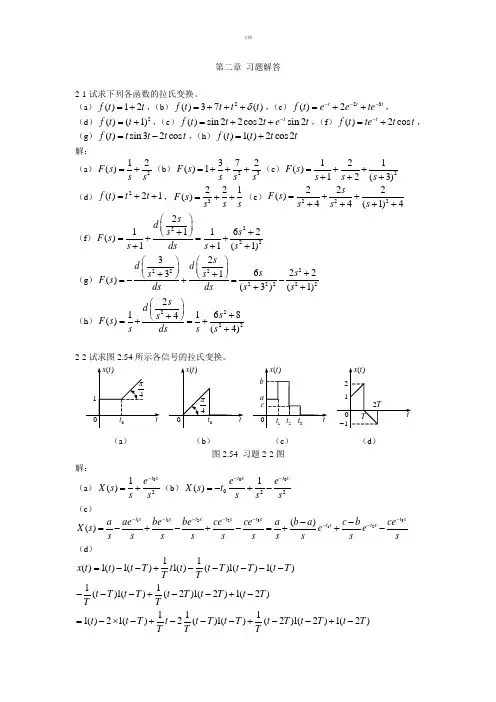
(a )()12f t t =+,(b )2()37()f t t t t δ=+++,(c )23()2ttt f t e ete ---=++,(d )2()(1)f t t =+,(e )()sin 22cos 2sin 2tf t t t e t -=++,(f )()2cos tf t te t t -=+,(g )()sin32cos f t t t t t =-,(h )()1()2cos 2f t t t t =+ 解:(a )212()F s s s =+(b )23372()1F s s s s=+++(c )2121()12(3)F s s s s =+++++ (d )2()21f t t t =++,3221()F s s s s=++(e )222222()44(1)4s F s s s s =++++++ (f )2222211621()11(1)s d s s F s s ds s s ⎛⎫ ⎪++⎝⎭=+=++++ (g )2222222223262231()(3)(1)s d d s s s s F s ds ds s s ⎛⎫⎛⎫ ⎪ ⎪+++⎝⎭⎝⎭=-+=-++(h )2222211684()(4)s d s s F s s ds s s ⎛⎫ ⎪++⎝⎭=+=++2-2试求图2.54所示各信号的拉氏变换。
(a ) (b ) (c ) (d )图2.54 习题2-2图解:(a )021()t s e X s s s -=+(b )000221()t s t se e X s t s s s--=-+- (c )33112212()()t s t st s t s t s t s t s t s a ae be be ce ce a b a c b ce X s e e s s s s s s s s s s----------=-+-+-=++-(d )11()1()1()1()()1()1()11()1()(2)1(2)1(2)1111()21()2()1()(2)1(2)1(2)x t t t T t t t T t T t T T Tt T t T t T t T t T T Tt t T t t T t T t T t T t T T T T=--+--------+--+-=-⨯-+---+--+-所以22222222211111111()222Ts Ts TsTsTs Ts s s s e e e e T T T X s e e s s T s T s T s s s s s------+++=-+-++=-+2-3运用部分分式展开,求下列各像函数的原函数。
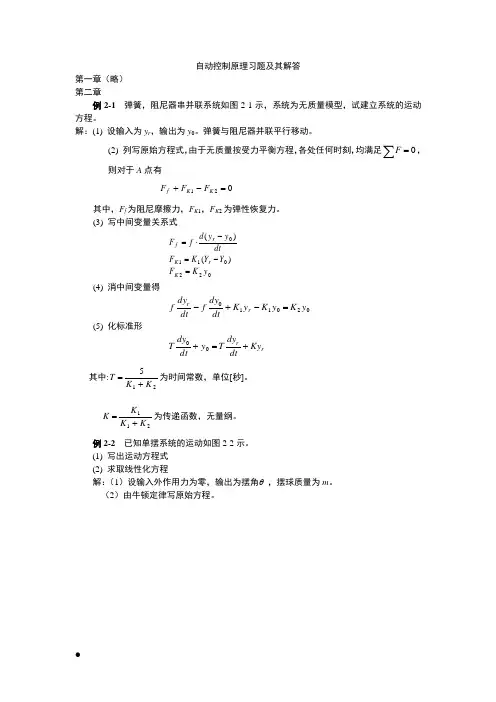
自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0s i n 22=++θθθmg dt d al dtd ml (2-1) 此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。

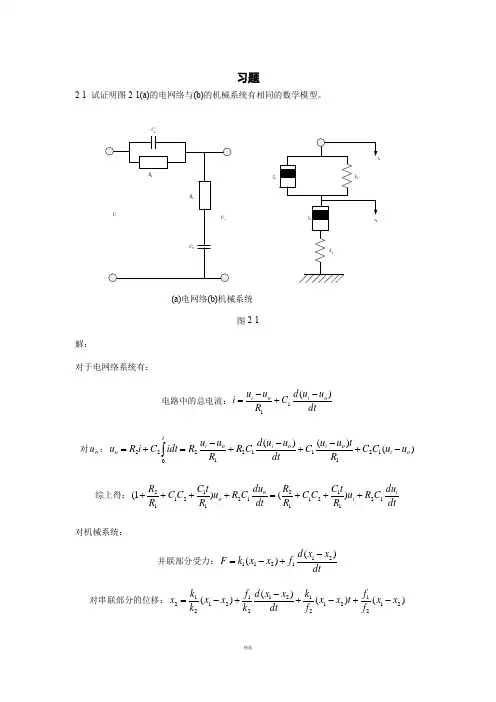
习题2-1 试证明图2-1(a)的电网络与(b)的机械系统有相同的数学模型。
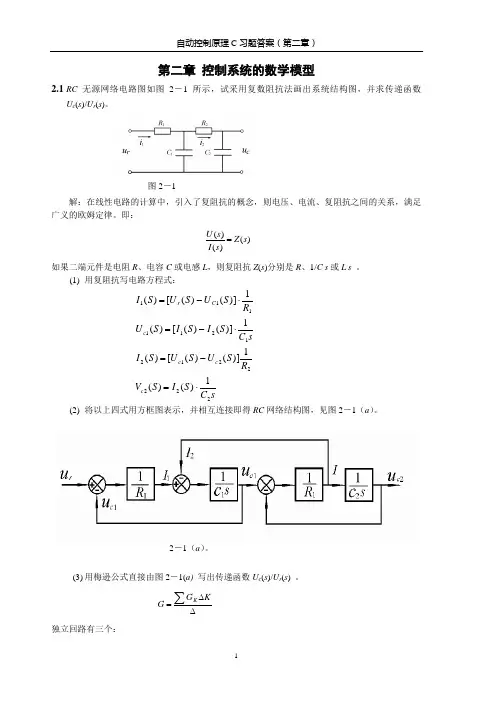
1C 1f 1(a)电网络(b)机械系统图2-1解:对于电网络系统有:电路中的总电流:dtu u d C R u u i o i o i )(11-+-=对o u :)()()(1211121222o i o i o i o i to u u C C R t u u C dt u u d C R R u u R idt C i R u -+-+-+-=+=⎰综上得:dtdu C R u R tC C C R R dt du C R u R t C C C R R i i o o 1211211212112112)()1(+++=++++对机械系统:并联部分受力:dtx x d f x x k F )()(211211-+-= 对串联部分的位移:)()()()(21212121212121212x x f f t x x f k dt x x d k f x x k k x -+-+-+-=整理得:dtdx k f x f f t f k k k dt dx k f x f f t f k k k 12122121212211212121)()1(+++=++++所以,两系统具有相同的数学模型2-5求图2-2中RC 电路和运算放大器的传递函数c ()/()i U s U s 。
1R1R(a) RC 电路 (b) RC 电路1R(c) RC 电路 (d) 运算放大器图2-2解:21212)()()R sCR R R R s u s u a r c ++=οο1)()()()()()()3122112322121121211231212112++++++++=S R C R C R C S R R C C R R C C SR C R C S R R C C R R C C s u s u b rc οο2121212)()()()R R S CR CR R R CS R s u s u c r c +++=οο21212112)()()()S LCR R R S CR R LR R LS s u s u d r c ++++=οο2-6求图2-3所示系统的传递函数C(s)/D(s)和E(s)/D(s)。

自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换 (1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim limt z z z z f t z E z z z →∞→→-=-==-- 2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a =证明:0()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
第二章 习题解析2-4 当系统处于零初始条件下时,给系统输入单位阶跃响应信号,其输出响应为2()1t t y t e e --=-+试求该系统的传递函数。
参考解答:2111421()()21(2)(1)s s Y s R s s s s s s s s++=-+==++++ 22()42()()32Y s s s G s R s s s ++==++2-5 某可控硅整流器的输出电压d 2cos U KU αΦ=式中,K 为常数;2U Φ为整流变压器副边相电压有效值;α为可控硅的控制角。
设α在0α附近作微小变化,试将d U 与α的关系式线性化。
参考解答:将非线性微分方程d 2cos U KU αΦ=进行线性化,即在平衡点α0 附近将其展为泰勒级数取一次近似,线性化后用变量增量的线性方程ΔU d = C Δα 代替原来的非线性方程,式中常数2020sin sin dd dU C KU U KU d ααααααΦΦ===-→∆=-∆略去增加量符号“Δ”,上式可简写为20sin d U KU ααΦ=- 2-6 试求图2-70所示电路的传递函数()/()y r U s U s 。
参考解答:图 a)可作出该无源电路的动态结构图(图a-1)亦可作成图(图a-2)所示由结构图等效变换可求得传递函数212()11()()11c r U s R Cs bTs U s R R Cs Ts ++==+++式中21212(),1R T R R C b R R =+=<+ ,该网络称为滞后网络。
图 b)由图(b )网络可作出其动态结构图(b-1),简化为(b-2)即可得传递函数:112221122112212()(1)(1)()()1y r U s R C s R C s U s R C R C s R C R C R C s ++=++++该网络称为滞后-超前网络(滞后-超前电路)。
2-7 试求图2-71所示有源电路的传递函数y r ()/()U s U s 。
习 题 22-1 试证明图2-77(a )所示电气网络与图2 77(b )所示的机械系统具有相同的微分方程。
图2-77习题2—1图证明:首先看题2-1图中(a )()()()s U s U s U C R R -=()()()()s U Cs R s CsU s U R s I R R R R ⎪⎭⎫⎝⎛+=+=11 ()()s I s C R s U C ⎪⎪⎭⎫⎝⎛+=221()()()[]s U s U s C R s C R s U C R C -⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+=112211 ()()s U s C R s C R s U s C R s C R R C ⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+=⎥⎦⎤⎢⎣⎡+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+1122112211111 ()()()()()()s U R s C R s C s C R s U R s C R s C s C R R C11122211122211111+⨯+=⎥⎦⎤⎢⎣⎡++⨯+2—2试分别写出图2-78中各有源网络的微分方程。
图2-78 习题2-2图解: (a )()()()t u R t u R dt t du Co r r 211-=+ (b )()()()⎥⎦⎤⎢⎣⎡+-=t u R dt t du C t u R r o 2o 111(c)()()()⎥⎦⎤⎢⎣⎡+-=t u dt t du C R t u R r c c 211 2—3某弹簧的力一位移特性曲线如图2—79所示。
在仅存在小扰动的情况下,当工作点分别为x 0=-1.2,0,2.5时,试求弹簧在工作点附近的弹性系数。
解:由题中强调“仅存在小扰动"可知,这是一道非线性曲线线性化处理的问题。
于是有,在x 0=—1.2,0,2。
5这三个点处对弹簧特性曲线做切线,切线的导数或斜率分别为:1)()()35.5625.2805.175.040402.1==----=-=x dx df2)20020400=--==x dx df 3)65.2155.0320355.2==--==x dx df2- 4图2—80是一个转速控制系统,其中电压u 为输入量,负载转速ω为输出量。
习 题 22-1 试证明图2-77(a)所示电气网络与图2 77(b)所示的机械系统具有相同的微分方程。
图2-77习题2-1图证明:首先看题2-1图中(a)()()()s U s U s U C R R -=()()()()s U Cs R s CsU s U R s I R R RR ⎪⎭⎫⎝⎛+=+=11 ()()s I s C R s U C ⎪⎪⎭⎫⎝⎛+=221()()()[]s U s U s C R s C R s U C R C -⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+=112211 ()()s U s C R s C R s U s C R s C R R C ⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+=⎥⎦⎤⎢⎣⎡+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+1122112211111 ()()()()()()s U R s C R s C s C R s U R s C R s C s C R R C11122211122211111+⨯+=⎥⎦⎤⎢⎣⎡++⨯+2-2试分别写出图2-78中各有源网络的微分方程。
图2-78 习题2-2图解: (a)()()()t u R t u R dt t du Co r r 211-=+ (b)()()()⎥⎦⎤⎢⎣⎡+-=t u R dt t du C t u R r o 2o 111(c) ()()()⎥⎦⎤⎢⎣⎡+-=tudttduCRtuR r cc2112-3某弹簧的力一位移特性曲线如图2-79所示。
在仅存在小扰动的情况下,当工作点分别为x0=-1.2,0,2.5时,试求弹簧在工作点附近的弹性系数。
解:由题中强调“仅存在小扰动”可知,这是一道非线性曲线线性化处理的问题。
于是有,在x0=-1.2,0,2.5这三个点处对弹簧特性曲线做切线,切线的导数或斜率分别为:1)()()35.5625.2805.175.040402.1==----=-=xdxdf2)20240=--==xdxdf3)65.2155.0320355.2==--==xdxdf2- 4图2-80是一个转速控制系统,其中电压u为输入量,负载转速ω为输出量。
试写出该系统输入输出间的微分方程和传递函数。
解:根据系统传动机构图可列动态如下:()()()tuKdttdiLtRire=++ω(1)iKTTem=(2)dtdJTiKTTLTLemω=-=-(3)将方程(3)整理后得:dtdKJTKiTLTω+=1(4)将方程(4)代入方程(1)后得:()tuKdtdKLJdtdTKLdtdKRJTKRreTLTTLT=++++ωωω22(5)将方程(5)整理后得:()dtdT K L T K R t u K dt d K RJ dt d K LJ LT LT r e T T --=++ωωω22 (6) 2-5 系统的微分方程组如下式中,r ,K-,K2,K 。
,Kn ,Kj ,T 均为常数。
试建立系统r(f)对c(f)的结构图,并求系统传递函数 C(s)/R(s)。
解:首先画系统结构图,根据动态方程有:然后,根据梅逊公式得:()()()()()()()()()()()()()()11111111111543314321432543343214321++++++++++++=++++++++=Ts s K K K Ts s Ts K Ts s K s K K K Ts s Ts s Ts s K s K K K Ts s K K K s K Ts K s K K K s Ts K s K K K s s R s C ττττ()()()()()543343213432214321K K K K K K K K s T K K K K Ts K s K K K s R s C +++++++=ττ 2 6 图2-8l 是一个模拟调节器的电路示意图。
X 1(s)X 2(s)X 2(s)X 3(s)X 4(s)X 5(s)C (s)τs+K 1K 2K 3/sK 4/(Ts+1)K 5① 写出输入u i ,与输出u o 之间的微分方程; ② 建立该调节器的结构图; ③ 求传递函数U o (s)/U r (s)。
解:根据电路分析需要,引入中间变量v o1(t ),v o2(t ),然后,由电路图可知:()()()s U s C R R s U R s U i o1121o 11⎪⎪⎭⎫ ⎝⎛+-=+ (1) ()()s sU C R s U o223o1-= (2) ()()s U R R s U o245o -= (3) 采用代入法,将上述3个方程联立求解得:()()()[]()()()[]s U s U s C R s C R R R R R s U s U R s C R R s C R R R s U o i 12243152o i 11222345o 1111++-=++⨯⨯-= ()()()s U sC R R s C R s C R R R R R s U i 15212243152o 1++-=()()()⎪⎪⎭⎫⎝⎛++⨯=++-=12243115224311243151522431212243152i o 1C R C R R R C R R C R R R s s C C R R R R s C R R s C R R R s C R C R R R R R s U s U 2-7某机械系统如图2-82所示。
质量为m 、半径为R 的均质圆筒与弹簧和阻尼器相连(通过轴心),假定圆筒在倾角为α的斜面上滚动(无滑动),求出其运动方程。
解:首先,对圆辊进行受力分析;根据分析结果可知:-K x 1mg sin α-Bd x /dtmgmg cos αN21211sin dt x d m dt dx B Kx mg =--ααsin 11212mg Kx dtdxB dt x d m =++ 2 8 图2-83是一种地震仪的原理图。
地震仪的壳体固定在地基上,重锤M 由弹簧K 支撑。
当地基上下震动时,壳体随之震动,但是由于惯性作用,重锤的运动幅度很小,这样它与壳体之间的相对运动幅度就近似等于地震的幅度,而由指针指示出来。
活塞B 提供的阻尼力正比于运动的速度,以便地震停止后指针能及时停止震动。
①写出以指针位移y 为输出量的微分方程; ②核对方程的量纲。
解:首先,对重锤进行受力分析;根据分析结果可知:22dt yd m dt dy B Ky mg =--mg Kx dt dxB dtx d m =++112122 9 试简化图2-84中各系统结构图,并求传递函数c(s)/R(s)。
图2-84习题2-9图解:(a),根据梅逊公式得:前向通道传递函数P k :()()s G s G P 211=;()()s G s G P 232=回路通道传递函数L i :()()()s H s G s G L 2211-=;()()s H s G L 122-=特征方程△:()()()()()s H s G s H s G s G L i 1222111++=∑-=∆由于回路传递函数都与前向通路相“接触”,所以。
余子式:121=∆=∆ 系统传递函数为:()()()()()()()()()()()()s H s G s H s G s G s G s G s G s G s R s C s 1222132211+++==Φ (b),根据梅逊公式得:前向通道传递函数P k :()()s G s G P 211=;回路通道传递函数L i :()()s H s G L 111-=;()()s H s H L 212-= 特征方程△:()()()()s H s H s H s G L i 211111++=∑-=∆由于回路传递函数L 2与前向通路相“不接触”,所以。
余子式:()()s H s H 2111+=∆ 系统传递函数为:()()()()()()()()()()()()s G s H s H s H s G s H s H s G s R s C s 2211121111+++==Φ(c),根据梅逊公式得:前向通道传递函数P k :()()()()s G s G s G s G P 43211=; 回路通道传递函数L i :()()()()()s H s G s G s G s G L 143211=;()()()()s H s G s G s G L 23212-= ()()()s H s G s G L 3323-= ()()()s H s G s G L 4434-=特征方程△:()()()()()()()()()()()()()()()s H s G s G s H s G s G s H s G s G s G s H s G s G s G s G L i 44333223211432111+++-=∑-=∆由于回路传递函数都与前向通路相“接触”,所以。
余子式:11=∆系统传递函数为:()()()()()()()()()()()()()()()()()()()()()()s H s G s G s H s G s G s H s G s G s G s H s G s G s G s G s G s G s G s G s R s C s 44333223211432143211+++-==Φ2-10试用梅逊公式求解习题2-9所示系统的传递函数C(s)/R(s)。
2-11 系统的结构如图2-85所示。
① 求传递函数C 1(s)/R I (s),C 1(s)/R 2(s),C 2(s)/R I (s),C 2(s) R 2(s),② 求传递函数阵G (s)C (s)= G (s)R (s),其中()()()⎥⎦⎤⎢⎣⎡=s G s G s 21G ,()()()⎥⎦⎤⎢⎣⎡=s R s R s 21R 。
解:C 1(s)/R I (s),根据梅逊公式得:前向通道传递函数P k :()()()s G s G s G P 3211=;()()()()()s G s G s G s G s G P 385712=;回路通道传递函数∑L i :()()s G s G L 331-=;()()()s G s G s G L 8572= ()()s H s G L 253-=相互“不接触”回路∑L i L j :()()()()()s G s G s G s G s G L L 8573321-= ()()()()s H s G s G s G L L 253331=特征方程△:ji i L L L ∑+∑-=∆1()()()()()()()()()()()()()()()()s H s G s G s G s G s G s G s G s G s H s G s G s G s G s G s G 25338573325857331--++-+=由于回路传递函数都与前向通路相“接触”,所以。