北航最优化方法作业答案uco_trustregion
- 格式:pdf
- 大小:672.86 KB
- 文档页数:23
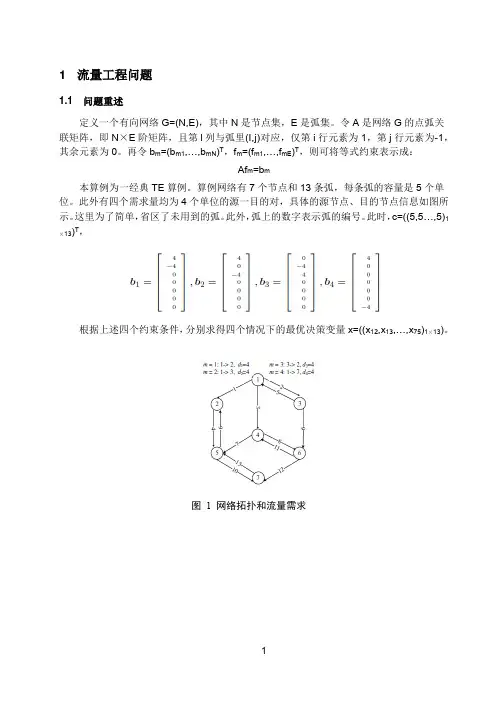
1 流量工程问题1.1 问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5…,5)1 )T,×13)。
根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×13图 1 网络拓扑和流量需求1.2 7节点算例求解1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T)转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.2 算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2X2>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.3 算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T对应的最优值c T x3=401.2.4 算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3 计算结果及结果说明1.3.1 算例1(b1=[4;-4;0;0;0;0;0]T)算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
北航最优化大作业1.引言旅行商问题(Traveling Salesman Problem,TSP)是一种经典的组合优化问题,目标是找到一条路径,使得旅行商从起点出发,途经所有城市一次后返回起点,并且总路径长度最短。
TSP问题具有NP-hard的特性,寻找最优解是一个非常具有挑战性的任务。
本文将基于禁忌算法,探讨TSP问题的求解方法。
2.禁忌算法简介禁忌算法是一种基于局部的元启发式算法,通过在过程中禁止一定的动作来跳出局部最优解,以期望获得更好的全局最优解。
算法通过引入禁忌表和禁忌长度等机制,避免过程中陷入局部最优解。
3.TSP问题的数学建模假设有n个城市,城市之间的距离可以表示为一个n×n的距离矩阵D。
TSP问题的目标可以定义为:min ∑_(i=1)^n ∑_(j=1)^(n) D_ij*x_ijs.t. ∑_(i=1)^n x_ij=1,∑_(j=1)^n x_ij=1,∀i ≠ jx_ij∈{0,1}, 1≤i,j≤n其中x_ij表示城市i与城市j之间的路径是否存在,1表示存在,0表示不存在。
4.禁忌算法在TSP问题中的应用(1)初始化选取一个起始解x,计算其路径长度f(x)。
将x设为当前解x_best,将f(x)设为当前解的最优值f_best。
(2)选择邻域解选择当前解的一个邻域解x',使得x'与x只有一个位置上的交换。
通过随机选择两个位置,进行交换操作。
(3)禁忌判断如果邻域解x'的路径长度f(x')小于当前解的最优值f_best,则更新f_best为f(x'),并将x'设为新的当前解。
否则,比较x'与当前解的禁忌情况。
(4)禁忌更新如果x'未在禁忌表中,或者禁忌表中对应的禁忌周期已过,则将x'设为新的当前解。
否则,选择一个路径长度较短的邻域解x'',即使其路径长度f(x'')大于f_best。


最优化方法信赖域方法Trusted Domain Method of Optimization Methods一、概述信赖域(Trusted Domain)法是一种针对多目标最优化问题的优化方法,属于启发式优化技术,又被称为受信域法(Credible Domain)法或者受信域增强法(Credible Domain Enhancement)。
它由A.K.Chentsov在1980年提出,目前已经在工业优化、控制优化、混合模糊优化等领域有广泛的应用。
信赖域法使多目标最优化问题中的搜索变得更加有效和快捷,可以很好地处理多目标最优化问题中的非凸性和高维问题,使最优解更容易被获取。
二、原理信赖域方法优化的原理是:在解空间中划分子空间,在每个子空间中进行最优优化,同时进行领域大小的优化,以找到最优解。
(1)划分的子空间划分的子空间由一组不可分割的解空间,即称为“信赖域(Trusted Domain)”确定,有一种收敛性的在同一信赖域上的解空间集合,该信赖域中必须包含一个或多个最优解点。
(2)之分的子空间有效性在信赖域中,有一种收敛性的解空间,该解空间必须包含一个或多个最优解点,且此处解的收敛性可以满足要求。
由此可以看出,划分的子空间有效的充分利用解空间,能够使对最优解的搜索效率更高,更快地找到最优解。
(3)领域大小的优化在划分解空间时,信赖域方法重点考虑领域大小的优化,以缩小搜索空间大小,并引导搜索过程朝最优解的方向发展。
三、应用1.工业优化信赖域方法已经在工业优化领域得到应用,使多目标工业优化问题中的搜索更加有效和快捷,可以很好地处理多目标最优化问题中的非凸性和高维问题,使最优解更容易被获取。
2.控制优化由于信赖域方法能够有效地处理多目标非凸性和高维问题,因此已经在控制优化中得到应用,用于设计准确性好的控制系统。
3.混合模糊优化信赖域方法在混合模糊优化领域也有应用,可以用来解决特殊类型的模糊控制优化问题,来有效地提高优化中的效率和准确性。
练习题一1、建立优化模型应考虑哪些要素? 答:决策变量、目标函数和约束条件。
2、讨论优化模型最优解的存在性、迭代算法的收敛性及停止准则。
答:针对一般优化模型()()min ()..0,1,2, 0,1,,i j f x s t g x i m h x j p≥===,讨论解的可行域D ,若存在一点*X D ∈,对于X D ∀∈ 均有*()()f X f X ≤则称*X 为优化模型最优解,最优解存在;迭代算法的收敛性是指迭代所得到的序列(1)(2)(),,,K X X X ,满足(1)()()()K K f X f X +≤,则迭代法收敛;收敛的停止准则有(1)()k k x x ε+-<,(1)()()k k k x x x ε+-<,()()(1)()k k f x f x ε+-<,()()()(1)()()k k k f x f x f x ε+-<,()()k f x ε∇<等等。
练习题二1、某公司看中了例2.1中厂家所拥有的3种资源R 1、R2、和R 3,欲出价收购(可能用于生产附加值更高的产品)。
如果你是该公司的决策者,对这3种资源的收购报价是多少?(该问题称为例2.1的对偶问题)。
解:确定决策变量 对3种资源报价123,,y y y 作为本问题的决策变量。
确定目标函数 问题的目标很清楚——“收购价最小”。
确定约束条件 资源的报价至少应该高于原生产产品的利润,这样原厂家才可能卖。
因此有如下线性规划问题:123min 170100150w y y y =++1231231235210..23518,,0y y y s t y y y y y y ++≥⎧⎪++≥⎨⎪≥⎩ *2、研究线性规划的对偶理论和方法(包括对偶规划模型形式、对偶理论和对偶单纯形法)。
答:略。
3、用单纯形法求解下列线性规划问题:(1)⎪⎪⎩⎪⎪⎨⎧≥≤+-≤++≤-++-=0,,43222..min32131321321321x x x x x x x x x x x t s x x x z ; (2)⎪⎪⎩⎪⎪⎨⎧=≥=++=+-=+-+-=)5,,2,1(052222..4min 53243232132 i x x x x x x x x x x t s x x z i解:(1)引入松弛变量x 4,x 5,x 6123456min 0*0*0*z x x x x x x =-++++12341232 =22 5 =3..13 6=41,2,3,4,5,60x x x x x x x x s t x x x x x x x x x +-+⎧⎪+++⎪⎨-++⎪⎪≥⎩因检验数σ2<0,故确定x 2为换入非基变量,以x 2的系数列的正分量对应去除常数列,最小比值所在行对应的基变量x 4作为换出的基变量。
习题二包括题目: P36页 5(1)(4)5(4)习题三包括题目:P61页 1(1)(2); 3; 5; 6; 14;15(1) 1(1)(2)的解如下3题的解如下5,6题14题解如下14. 设22121212()(6)(233)f x x x x x x x =+++---, 求点在(4,6)T-处的牛顿方向。
解:已知 (1)(4,6)T x=-,由题意得121212212121212(6)2(233)(3)()2(6)2(233)(3)x x x x x x x f x x x x x x x x +++-----⎛⎫∇= ⎪+++-----⎝⎭∴ (1)1344()56g f x -⎛⎫=∇=⎪⎝⎭21212122211212122(3)22(3)(3)2(233)()22(3)(3)2(233)22(3)x x x x x x x f x x x x x x x x +--+--------⎛⎫∇= ⎪+--------+--⎝⎭∴ (1)2(1)1656()()564G x f x --⎛⎫=∇=⎪-⎝⎭(1)11/8007/400()7/4001/200G x --⎛⎫= ⎪--⎝⎭∴ (1)(1)11141/100()574/100d G x g -⎛⎫=-=⎪-⎝⎭15(1)解如下15. 用DFP 方法求下列问题的极小点(1)22121212min 353x x x x x x ++++解:取 (0)(1,1)T x=,0H I =时,DFP 法的第一步与最速下降法相同2112352()156x x f x x x ++⎛⎫∇= ⎪++⎝⎭, (0)(1,1)T x =,(0)10()12f x ⎛⎫∇= ⎪⎝⎭(1)0.07800.2936x -⎛⎫= ⎪-⎝⎭, (1)1.3760() 1.1516f x ⎛⎫∇= ⎪-⎝⎭以下作第二次迭代(1)(0)1 1.07801.2936x x δ-⎛⎫=-= ⎪-⎝⎭, (1)(0)18.6240()()13.1516f x f x γ-⎛⎫=∇-∇= ⎪-⎝⎭0110111011101T T T TH H H H H γγδδδγγγ=+- 其中,111011126.3096,247.3380T T TH δγγγγγ===111.1621 1.39451.3945 1.6734Tδδ⎛⎫= ⎪⎝⎭ , 01101174.3734113.4194113.4194172.9646T TH H γγγγ⎛⎫== ⎪⎝⎭所以10.74350.40560.40560.3643H -⎛⎫= ⎪-⎝⎭(1)(1)1 1.4901()0.9776dH f x -⎛⎫=-∇= ⎪⎝⎭令 (2)(1)(1)1xx d α=+ , 利用 (1)(1)()0df x d d αα+=,求得 10.5727α=-所以 (2)(1)(1)0.77540.57270.8535xx d⎛⎫=-= ⎪-⎝⎭ , (2)0.2833()0.244f x ⎛⎫∇= ⎪-⎝⎭以下作第三次迭代(2)(1)20.85340.5599x x δ⎛⎫=-= ⎪-⎝⎭ , (2)(1)2 1.0927()()0.9076f x f x γ-⎛⎫=∇-∇= ⎪⎝⎭22 1.4407T δγ=- , 212 1.9922T H γγ=220.72830.47780.47780.3135T δδ-⎛⎫=⎪-⎝⎭1221 1.39360.91350.91350.5988T H H γγ-⎛⎫= ⎪-⎝⎭所以22122121222120.46150.38460.38460.1539T T T TH H H H H δδγγδγγγ-⎛⎫=+-= ⎪-⎝⎭(2)(2)20.2246()0.1465d H f x ⎛⎫=-∇= ⎪-⎝⎭令 (3)(2)(2)2xxdα=+ , 利用(2)(2)()0df x d d αα+=,求得 21α=所以 (3)(2)(2)11x x d ⎛⎫=+=⎪-⎝⎭, 因为 (3)()0f x ∇=,于是停止 (3)(1,1)T x =-即为最优解。
《最优化方法》1一、填空题:1. _______________________________________________________ 最优化问题的数学模型一般为:_____________________________________________ ,其中___________ 称为目标函数,___________ 称为约束函数,可行域D可以表示为_______________________________ ,若 ________________________________ ,称/为问题的局部最优解,若为问题的全局最优解。
2.设f(x)= 2斤+2“2-兀|+5花,则其梯度为__________ ^x = (l,2)r?6/ = (l,0)r,则f(x)在壬处沿方向d的一阶方向导数为___________ ,几何意义为_____________________________________ ,二阶方向导数为____________________ ,几何意义为_____________________________3.设严格凸二次规划形式为:min /(%) = 2兀]2 + 2x; - 2兀]-x2s.t. 2%! 4- x2 < 1> 0x2 > 0则其对偶规划为_______________________________________________min%(d ) = f (x k +ad k )的最优步长为务=—叫)F.d kT Gd k2. (10分)证明凸规划min/(x ),x G D (其中子(兀)为严格凸函数,D 是凸集)的最优解是唯一的3. (13分)考虑不等式约束问题min /(x )s.t. c i (x ) < 0, Z G / = {1,2,…,加}其中/(x ),6 (兀)a e /)具有连续的偏导数,设X 是约束问题的可行点,若在元处 d 满足巧(计<0,VC,(元)(可则d 是元处的可行下降方向。
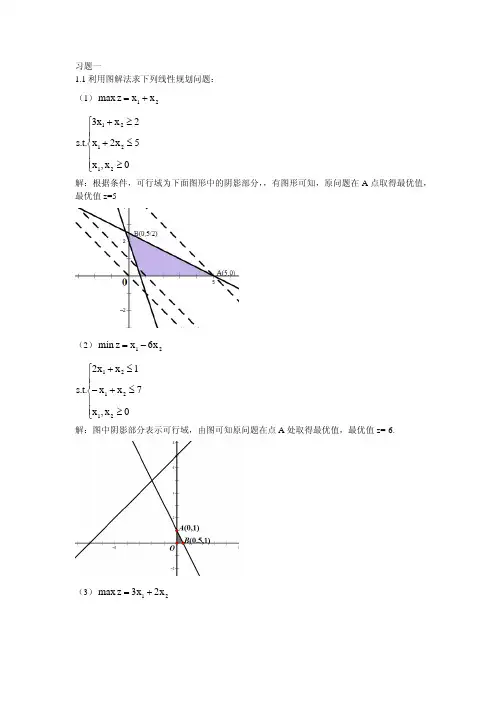
习题一1.1利用图解法求下列线性规划问题: (1)21x x z max +=⎪⎪⎩⎪⎪⎨⎧≥≤+≥+0x ,x 5x 2x 2x x 3.t .s 212121 解:根据条件,可行域为下面图形中的阴影部分,,有图形可知,原问题在A 点取得最优值,最优值z=5(2)21x 6x z min -=⎪⎪⎩⎪⎪⎨⎧≥≤+-≤+0x ,x 7x x 1x x 2.t .s 212121 解:图中阴影部分表示可行域,由图可知原问题在点A 处取得最优值,最优值z=-6.(3)21x 2x 3z max +=⎪⎪⎩⎪⎪⎨⎧≥-≥-≤+-0x ,x 4x 2x 1x x .t .s 212121 解:如图所示,可行域为图中阴影部分,易得原线性规划问题为无界解。
(4)21x 5x 2z min -=⎪⎪⎩⎪⎪⎨⎧≥≤+≥+0x ,x 2x x 6x 2x .t .s 212121 解:由图可知该线性规划可行域为空,则原问题无可行解。
1.2 对下列线性规划问题,找出所有的基解,基可行解,并求出最优解和最优值。
(1)4321x 6x 3x 2x 5z min -+-=⎪⎪⎩⎪⎪⎨⎧≥=+++=+++0x ,x ,x ,x 3x 2x x x 27x 4x 3x 2x .t .s 432143214321 解:易知1x 的系数列向量⎪⎪⎭⎫ ⎝⎛=21p 1,2x 的系数列向量⎪⎪⎭⎫ ⎝⎛=12p 2,3x 的系数列向量⎪⎪⎭⎫⎝⎛=13p 3,4x 的系数列向量⎪⎪⎭⎫⎝⎛=24p 4。
①因为21p ,p 线性无关,故有⎪⎩⎪⎨⎧--=+--=+43214321x 2x 3x x 2x 4x 37x 2x ,令非基变量为0x x 43==,得⎪⎪⎩⎪⎪⎨⎧=-=311x 31x 21,所以得到一个基解)0,0,311,31(x )1(-=是非基可行解; ②因为31p ,p 线性无关,可得基解)0,511,0,52(x)2(=,543z 2=;③因为41p ,p 线性无关,可得基解611,0,0,31(x )3(-=,是非基可行解;④因为32p ,p 线性无关,可得基解)0,1,2,0(x )4(=,1z 4-=;⑤因为42p ,p 线性相关,42x ,x 不能构成基变量; ⑥因为43p ,p 线性无关,可得基解)1,1,0,0(x )6(=,3z 6-=;所以)6()4()2(x ,x ,x是原问题的基可行解,)6(x 是最优解,最优值是3z -=。
练习题一1、建立优化模型应考虑哪些要素? 答:决策变量、目标函数和约束条件。
2、讨论优化模型最优解的存在性、迭代算法的收敛性及停止准则。
答:针对一般优化模型()()min ()..0,1,2, 0,1,,i j f x s t g x i m h x j p≥===L L ,讨论解的可行域D ,若存在一点*X D ∈,对于X D ∀∈ 均有*()()f X f X ≤则称*X 为优化模型最优解,最优解存在;迭代算法的收敛性是指迭代所得到的序列(1)(2)(),,,K X X X L L ,满足(1)()()()K K f X f X +≤,则迭代法收敛;收敛的停止准则有(1)()k k x x ε+-<,(1)()()k k k x x x ε+-<,()()(1)()k k f x f x ε+-<,()()()(1)()()k k k f x f x f x ε+-<,()()k f x ε∇<等等。
练习题二1、某公司看中了例2.1中厂家所拥有的3种资源R 1、R2、和R 3,欲出价收购(可能用于生产附加值更高的产品)。
如果你是该公司的决策者,对这3种资源的收购报价是多少?(该问题称为例2.1的对偶问题)。
解:确定决策变量 对3种资源报价123,,y y y 作为本问题的决策变量。
确定目标函数 问题的目标很清楚——“收购价最小”。
确定约束条件 资源的报价至少应该高于原生产产品的利润,这样原厂家才可能卖。
因此有如下线性规划问题:123min 170100150w y y y =++1231231235210..23518,,0y y y s t y y y y y y ++≥⎧⎪++≥⎨⎪≥⎩ *2、研究线性规划的对偶理论和方法(包括对偶规划模型形式、对偶理论和对偶单纯形法)。
答:略。
3、用单纯形法求解下列线性规划问题:(1)⎪⎪⎩⎪⎪⎨⎧≥≤+-≤++≤-++-=0,,43222..min32131321321321x x x x x x x x x x x t s x x x z ; (2)⎪⎪⎩⎪⎪⎨⎧=≥=++=+-=+-+-=)5,,2,1(052222..4min53243232132Λi x x x x x x x x x x t s x x z i解:(1)引入松弛变量x 4,x 5,x 6123456min 0*0*0*z x x x x x x =-++++12341232 =22 5 =3..13 6=41,2,3,4,5,60x x x x x x x x s t x x x x x x x x x +-+⎧⎪+++⎪⎨-++⎪⎪≥⎩因检验数σ2<0,故确定x 2为换入非基变量,以x 2的系数列的正分量对应去除常数列,最小比值所在行对应的基变量x 4作为换出的基变量。
习题二包括题目: P36页 5〔1〕〔4〕 5〔4〕习题三包括题目:P61页 1(1)(2); 3; 5; 6; 14;15(1) 1(1)(2)的解如下 3题的解如下 5,6题14题解如下14. 设22121212()(6)(233)f x x x x x x x =+++---, 求点在(4,6)T-处的牛顿方向。
解: (1)(4,6)T x=-,由题意得∴(1)1344()56g f x -⎛⎫=∇=⎪⎝⎭21212122211212122(3)22(3)(3)2(233)()22(3)(3)2(233)22(3)x x x x x x x f x x x x x x x x +--+--------⎛⎫∇= ⎪+--------+--⎝⎭∴(1)2(1)1656()()564G x f x --⎛⎫=∇=⎪-⎝⎭∴(1)(1)11141/100()574/100d G x g -⎛⎫=-=⎪-⎝⎭15〔1〕解如下15. 用DFP 方法求以下问题的极小点〔1〕22121212min 353x x x x x x ++++解:取 (0)(1,1)T x=,0H I =时,DFP 法的第一步与最速下降法一样2112352()156x x f x x x ++⎛⎫∇= ⎪++⎝⎭, (0)(1,1)T x =,(0)10()12f x ⎛⎫∇= ⎪⎝⎭(1)0.07800.2936x -⎛⎫= ⎪-⎝⎭, (1)1.3760() 1.1516f x ⎛⎫∇= ⎪-⎝⎭以下作第二次迭代(1)(0)1 1.07801.2936x x δ-⎛⎫=-= ⎪-⎝⎭, (1)(0)18.6240()()13.1516f x f x γ-⎛⎫=∇-∇= ⎪-⎝⎭其中,111011126.3096,247.3380T T TH δγγγγγ===11 1.1621 1.39451.3945 1.6734T δδ⎛⎫= ⎪⎝⎭ , 01101174.3734113.4194113.4194172.9646T TH H γγγγ⎛⎫== ⎪⎝⎭所以 令 (2)(1)(1)1xx d α=+ , 利用 (1)(1)()0df x d d αα+=,求得 10.5727α=-所以 (2)(1)(1)0.77540.57270.8535x x d ⎛⎫=-= ⎪-⎝⎭ , (2)0.2833()0.244f x ⎛⎫∇= ⎪-⎝⎭以下作第三次迭代(2)(1)20.85340.5599x x δ⎛⎫=-= ⎪-⎝⎭ , (2)(1)2 1.0927()()0.9076f x f x γ-⎛⎫=∇-∇= ⎪⎝⎭22 1.4407T δγ=- , 212 1.9922T H γγ=所以 令 (3)(2)(2)2xxdα=+ , 利用(2)(2)()0df x d d αα+=,求得 21α= 所以 (3)(2)(2)11x x d ⎛⎫=+=⎪-⎝⎭, 因为 (3)()0f x ∇=,于是停顿 (3)(1,1)T x =-即为最优解。