北航惯性导航大作业
- 格式:doc
- 大小:1.22 MB
- 文档页数:26
惯性导航技术综合实验实验五惯性基组合导航及应用技术实验惯性/卫星组合导航系统车载实验一、实验目的①掌握捷联惯导/GPS组合导航系统的构成和基本工作原理;②掌握采用卡尔曼滤波方法进行捷联惯导/GPS组合的基本原理;③掌握捷联惯导 /GPS组合导航系统静态性能;④掌握动态情况下捷联惯导 /GPS组合导航系统的性能。
二、实验内容①复习卡尔曼滤波的基本原理(参考《卡尔曼滤波与组合导航原理》第二、五章);②复习捷联惯导/GPS组合导航系统的基本工作原理(参考以光衢编著的《惯性导航原理》第七章);三、实验系统组成①捷联惯导/GPS组合导航实验系统一套;②监控计算机一台。
③差分GPS接收机一套;④实验车一辆;⑤车载大理石平台;⑥车载电源系统。
四、实验内容1)实验准备①将IMU紧固在车载大理石减振平台上,确认IMU的安装基准面紧靠实验平台;②将IMU与导航计算机、导航计算机与车载电源、导航计算机与监控计算机、GPS 接收机与导航计算机、GPS 天线与GPS 接收机、GPS 接收机与GPS 电池之间的连接线正确连接;③ 打开GPS 接收机电源,确认可以接收到4颗以上卫星; ④ 打开电源,启动实验系统。
2) 捷联惯导/GPS 组合导航实验① 进入捷联惯导初始对准状态,记录IMU 的原始输出,注意5分钟内严禁移动实验车和IMU ;② 实验系统经过5分钟初始对准之后,进入导航状态; ③ 移动实验车,按设计实验路线行驶;④ 利用监控计算机中的导航软件进行导航解算,并显示导航结果。
五、 实验结果及分析(一)理论推导捷联惯导短时段(1分钟)位置误差,并用1分钟惯导实验数据验证。
1、一分钟惯导位置误差理论推导:短时段内(t<5min ),忽略地球自转0ie ω=,运动轨迹近似为平面1/0R =,此时的位置误差分析可简化为:(1) 加速度计零偏∇引起的位置误差:210.88022t x δ∇==m (2) 失准角0φ引起的误差:202 0.92182g t x φδ==m (3) 陀螺漂移ε引起的误差:330.01376g t x εδ==m 可得1min 后的位置误差值123 1.8157m x x x x δδδδ=++= 2、一分钟惯导实验数据验证结果:(1)纯惯导解算1min 的位置及位置误差图:lat0.01s 度lon0.01s度北向位移误差0.01sm 东向位移误差0.01sm(2)纯惯导解算1min 的速度及速度误差图:-100-50050Vx0.01s m /s020406080Vy0.01sm /s100020003000400050006000-0.4-0.3-0.2-0.10Vx 误差0.01s m /s100020003000400050006000-0.1-0.0500.050.1Vy 误差0.01sm /s实验结果分析:纯惯导解算短时间内精度很高,1min 的惯导解算的北向最大位移误差,东向最大位移误差,可见实验数据所得位置误差与理论推导的位置误差在同一数量级,结果不完全相同是因为理论推导时做了大量简化,而且实验时视GPS 为真实值也会带来误差;另外,可见1min 内纯惯导解算的东向速度最大误差s ,北向速度最大误差s 。
《惯性导航原理》第一次大作业姓名: XXXXX学号: SY13172XX邮箱: XXXXXXXXXXXXXXXXXXX2013/10/20一、 作业目的本次作业基于指北方位的平台惯导系统的相关原理,通过用matlab 对相关数据的处理,来模拟载体的速度、位置等相关参数,深入理解惯性导航系统的原理。
二、 设计要求1. 初始经度为:116.344762072818度;纬度为:39.981430918136度;高度为:40.8236米;初始姿态角为[0 0 0];初始速度为0米/秒;飞行高度不变。
2. 排列顺序:第一列:数据包序号;第二至四列:分别为东、北、天向陀螺仪角速率信息wib_INSc (单位:rad/s );第五至七列:分别为东、北、天向比力信息f_INSc (单位:m/s^2)。
3. 以经度为横轴,纬度为纵轴(单位均转换为:度)作出系统位置坐标曲线图。
4. 以列表形式给出系统纬度、经度、东向速度、北向速度的终点值。
三、 设计原理惯性导航的基本原理是测量载体的加速度,将加速度积分计算出载体的速度,由速度积分算得载体的相对位置。
对于加速度的测量可以用加速度计测得比力(单位质量相对惯性空间的加速度与引力加速度之差),由于是指北方位平台系统,利用加速度计提供的东、北、天三个方向的比力数据(ff f p zp yp x,,)算得当时平台的瞬间速度,进而计算出每个数据采集点平台的即时经纬度,数据由fw 中保存的比力f (单位:2/s m )和陀螺仪角速率信息w (单位:rad/s )提供,最终得到平台在运动过程中任意时刻的速度和位置信息。
四、 设计流程1. 通过比力算加速度(1)基于比力方程:惯导系统的基本方程为eie ie e ie e G r dt drdtr d f -⨯⨯+=+)(222ωωω, 其中edt rd 22 是载体相对地球的加速度;e ie dt dr ω2 是哥氏加速度;)(r ie ie ⨯⨯ωω是地球自转引起的向心加速度;eG 是地球引力加速度。
惯性导航技能概括真验之阳早格格创做真验五惯性基拉拢导航及应用技能真验惯性/卫星拉拢导航系统车载真验一、真验手段①掌握捷联惯导/GPS拉拢导航系统的形成战基础处事本理;②掌握采与卡我曼滤波要领举止捷联惯导/GPS拉拢的基根源基本理;③掌握捷联惯导 /GPS拉拢导航系统固态本能;④掌握动背情况下捷联惯导 /GPS拉拢导航系统的本能.两、真验真质①复习卡我曼滤波的基根源基本理(参照《卡我曼滤波与拉拢导航本理》第两、五章);②复习捷联惯导/GPS拉拢导航系统的基础处事本理(参照以光衢编著的《惯性导航本理》第七章);三、真验系统组成①捷联惯导/GPS拉拢导航真验系统一套;②监控预计机一台.③好分GPS交支机一套;④真验车一辆;⑤车载大理石仄台;⑥车载电源系统.四、真验真质1)真验准备①将IMU紧固正在车载大理石减振仄台上,确认IMU 的拆置基准里紧靠真验仄台;②将IMU与导航预计机、导航预计机与车载电源、导航预计机与监控预计机、GPS交支机与导航预计机、GPS 天线与GPS交支机、GPS交支机与GPS电池之间的连交线细确连交;③挨开GPS交支机电源,确认不妨交支到4颗以上卫星;④挨开电源,开用真验系统.2)捷联惯导/GPS拉拢导航真验①加进捷联惯导初初对于准状态,记录IMU的本初输出,注意5分钟内宽禁移动真验车战IMU;②真验系统通过5分钟初初对于准之后,加进导航状态;③移动真验车,按安排真验门路止驶;④利用监控预计机中的导航硬件举止导航解算,并隐现导航截止.五、真验截止及分解(一) 表里推导捷联惯导短时段(1分钟)位子缺点,并用1分钟惯导真验数据考证.1、一分钟惯导位子缺点表里推导:短时段内(t<5min ),忽略天球自转0ie ω=,疏通轨迹近似为仄里1/0R =,此时的位子缺点分解可简化为:(1) 加速度计整偏偏∇引起的位子缺点:210.88022t x δ∇==m(2) 得准角0φ引起的缺点:202 0.92182g t x φδ==m(3) 陀螺漂移ε引起的缺点:330.01376g t x εδ==m可得1min 后的位子缺点值123 1.8157m x x x x δδδδ=++=2、一分钟惯导真验数据考证截止:(1)杂惯导解算1min 的位子及位子缺点图:(2)杂惯导解算1min 的速度及速度缺点图:真验截止分解:杂惯导解算短时间内细度很下,1min 的惯导解算的北背最大位移缺点-2.668m ,东背最大位移缺点-8.231m ,可睹真验数据所得位子缺点与表里推导的位子缺点正在共一数量级,截止没有真足相共是果为表里推导时干了洪量简化,而且真验时视GPS 为真正在值也会戴去缺点;其余,可睹1min 内杂惯导解算的东背速度最大缺点-0.2754m/s ,北背速度最大缺点-0.08027m/s.(二) 采用IMU 前5分钟数据举止对于准真验.将初初对于准截止动做初值完毕1小时捷联惯导战拉拢导航解算,对于比1小时捷联惯导战拉拢导航截止.1、5minIMU数据的剖析细对于准截止:2、5minIMU数据的Kalman滤波细对于准截止:3、一小时IMU/GPS数据的拉拢导航截止图及预计圆好P 阵图:4、一小时IMU数据的捷联惯导解算截止与拉拢滤波、GPS 输出对于比图:5、截止分解:由滤波截止图不妨瞅出:(1)由拉拢后的速度、位子的P阵不妨瞅出滤波之后载体的速度战位子比GPS输出的细度下.(2)短时间内SINS的细度较下,初初阶段的导航截止基础战GPS、拉拢导航截止沉合,1小时后的捷联惯导解算截止很好,纬度、经度、下度均收集.(3)INS/GPS拉拢滤波的截止战GPS的输出截止格中近似,果为1小时的导航GPS的细度比SINS导航的细度下很多,Kalman滤波器中GPS旗号的权沉更大.(4)总体瞅去,SINS/GPS拉拢滤波的截止劣于单独用SINS或者GPS导航的截止,起到了协做、超出、冗余的效率,使导航系统更稳当.六、SINS/GPS拉拢导航步调%%%%%%%%%%%%%%%%%%%%%%%INS/GPS拉拢导航跑车1h真验%%%%%%%%%%%%%%%%%%%%%%%%%%%该步调为15维状态量,6维瞅丈量的kalman滤波步调,惯性/卫星拉拢紧耦合的数教模型clearclcclose all%%初初量定义wie = 0.000072921151467;Re = 6378135.072;g = 9.7803267714;e = 1.0 / 298.25;T = 0.01; %IMU频次100hz,此步调中GPS频次100hzdatanumber = 360000; %数据时间3600sa = load('imu_1h.dat');w = a(:,3:5)'*pi/180/3600; %陀螺仪输出的角速率疑息单位由°/h化为rad/sf = a(:,6:8)'; %三轴比较输出,单位ga = load('gps_1h_new.dat');gps_pos = a(:,3:5); %GPS输出的纬度、经度、下度疑息gps_pos(:,1:2) = gps_pos(:,1:2)*pi/180; %纬经单位化为弧度gps_v = a(:,6:8); %GPS输出的东北天速度疑息%捷联解算及卡我曼相闭v=zeros(datanumber,3); %拉拢后的速度疑息atti = zeros(datanumber,3); %拉拢后的姿态疑息pos = zeros(datanumber,3); %拉拢后的位子疑息gyro=zeros(3,1);acc=zeros(3,1);x_kf = zeros(datanumber,15);p_kf = zeros(datanumber,15);lon =116.3703629769560*pi/180;height =43.0674;fai = 219.9744642380873*pi/180;theta = -0.895865732956914*pi/180;gama = 0.640089448357591*pi/180;Vx=gps_v(1,1);Vy=gps_v(1,2);Vz=gps_v(1,3);X_o=zeros(15,1); %X的初值选为0X=zeros(15,1);%Q=diag([(50e-6*g)^2,(50e-6*g)^2,(50e-6*g)^2,(0.1*pi/180/3600)^2,(0.1*pi/180/3600)^2,(0.1*pi/180/36 00)^2,0,0,0,0,0,0,0,0,0]); %随机Q=diag([(0.008*pi/180/3600)^2,(0.008*pi/180/3600)^2,(0.008*pi/180/3600)^2,(50e-6*g)^2,(50e-6*g)^2,(50e-6*g)^2,0,0,0,0,0,0,0,0,0]);R=diag([(0.01)^2,(0.01)^2,(0.01)^2,(0.1)^2,(0.1)^2,(0.15)^2]); P=zeros(15);P_k=diag([(0.00005*pi/180)^2,(0.00005*pi/180)^2,(0.00005*pi /180)^2,0.00005^2,0.00005^2,0.00005^2,2^2,2^2,2^2,(0.001*pi /180/3600)^2,(0.001*pi/180/3600)^2,(0.001*pi/180/3600)^2,(50 e-6*g)^2,(50e-6*g)^2,(50e-6*g)^2]); %K=zeros(15,6);Z=zeros(6,1);I=eye(15);Cnb = [ cos(gama)*cos(fai)-sin(gama)*sin(theta)*sin(fai), cos(gama)*sin(fai)+sin(gama)*sin(theta)*cos(fai), -sin(gama)*cos(theta);-cos(theta)*sin(fai), cos(theta)*cos(fai), sin(theta);sin(gama)*cos(fai)+cos(gama)*sin(theta)*sin(fai),sin(gama)*sin(fai)-cos(gama)*sin(theta)*cos(fai), cos(gama) * cos(theta)];q = [ cos(fai/2)*cos(theta/2)*cos(gama/2) -sin(fai/2)*sin(theta/2)*sin(gama/2);cos(fai/2)*sin(theta/2)*cos(gama/2) - sin(fai/2)*cos(theta/2)*sin(gama/2);cos(fai/2)*cos(theta/2)*sin(gama/2) + sin(fai/2)*sin(theta/2)*cos(gama/2);cos(fai/2)*sin(theta/2)*sin(gama/2) + sin(fai/2)*cos(theta/2)*cos(gama/2)];Cnb_s=Cnb;q_s=q;for i=1:1:datanumberRmh = Re * (1.0 - 2.0 * e + 3.0 * e * sin(lat) * sin(lat)) + height;Rnh = Re * (1.0 + e * sin(lat) * sin(lat)) + height;Wien = [ 0; wie * cos(lat); wie * sin(lat)];Wenn = [ -Vy / Rmh; Vx / Rnh; Vx * tan(lat) / Rnh];Winn = Wien + Wenn;Winb = Cnb * Winn;for j=1:3gyro(j,1) = w(j,i);acc(j,1) = f(j,i)*g; %加速度疑息,单位化为m/s^2endangle = (gyro - Winb) * T;fn = Cnb'* acc;difVx = fn(1) + (2.0 * wie * sin(lat) + Vx * tan(lat) / Rnh) * Vy;difVy = fn(2) - (2.0 * wie * sin(lat) + Vx * tan(lat) / Rnh) * Vx;difVz = fn(3) + (2.0 * wie * cos(lat) + Vx / Rnh) * Vx + Vy * Vy / Rmh -g;Vx = difVx * T + Vx;Vy = difVy * T + Vy;Vz = difVz * T + Vz;lat = lat + Vy * T / Rmh;lon = lon + Vx * T / Rnh / cos(lat);height = height + Vz * T;M = [0, -angle(1), -angle(2), -angle(3);angle(1), 0, angle(3), -angle(2);angle(2), -angle(3), 0, angle(1);angle(3), angle(2), -angle(1), 0];q = (cos(norm(angle) / 2) * eye(4) + sin(norm(angle) / 2) / norm(angle) * M) * q;q = q / norm(q);Cnb = [ q(1)*q(1)+q(2)*q(2)-q(3)*q(3)-q(4)*q(4), 2*(q(2)*q(3)+q(1)*q(4)), 2*(q(2)*q(4)-q(1)*q(3));2*(q(2)*q(3)-q(1)*q(4)), q(1)*q(1)-q(2)*q(2)+q(3)*q(3)-q(4)*q(4), 2*(q(3)*q(4)+q(1)*q(2));2*(q(2)*q(4)+q(1)*q(3)), 2*(q(3)*q(4)-q(1)*q(2)),q(1)*q(1)-q(2)*q(2)-q(3)*q(3)+q(4)*q(4)];Rmh = Re * (1.0 - 2.0 * e + 3.0 * e * sin(lat) * sin(lat)) +height;Rnh = Re * (1.0 + e * sin(lat) * sin(lat)) + height; %以上为杂惯导解算%%F1=[0 wie*sin(lat)+v(i,1)*tan(lat)/(Rnh) -(wie*cos(lat)+v(i,1)/(Rnh)) 0 -1/(Rmh) 0 0 0 0;-(wie*sin(lat)+v(i,1)*tan(lat)/(Rnh)) 0 -v(i,2)/(Rmh)1/(Rnh) 0 0 -wie*sin(lat) 0 0;wie*cos(lat)+v(i,1)/(Rnh) v(i,2)/(Rmh) 0 tan(lat)/(Rnh) 0 0 wie*cos(lat)+v(i,2)*sec(lat)*sec(lat)/(Rnh) 0 0;0 -fn(3) fn(2) v(i,2)*tan(lat)/(Rmh)-v(i,3)/(Rmh)2*wie*sin(lat)+v(i,1)*tan(lat)/(Rnh) -(2*wie*cos(lat)+v(i,1)/(Rnh))(2*wie*cos(lat)*v(i,2)+v(i,1)*v(i,2)*sec(lat)*sec(lat)/(Rnh)+2*wie*sin(lat)*v(i,3)) 0 0;fn(3) 0 -fn(1) -2*(wie*sin(lat)+v(i,1)*tan(lat)/(Rnh)) -v(i,3)/(Rmh) -v(i,2)/(Rmh) -(2*wie*cos(lat)+v(i,1)*sec(lat)*sec(lat)/(Rnh))*v(i,1) 0 0;-fn(2) fn(1) 0 2*(wie*cos(lat)+v(i,1)/(Rnh)) 2*v(i,2)/(Rmh) 0 -2*wie*sin(lat)*v(i,1) 0 0;0 0 0 0 1/(Rmh) 0 0 0 0;0 0 0 sec(lat)/(Rnh) 0 0 v(i,1)*sec(lat)*tan(lat)/(Rnh) 0 0;0 0 0 0 0 1 0 0 0];G=[Cnb',zeros(3);zeros(3),Cnb';zeros(9,6)];H=[zeros(3),eye(3),zeros(3),zeros(3,6);zeros(3),zeros(3),diag([Rmh,Rnh*cos(lat),1]),zeros(3,6)];%量测阵F2=[-Cnb',zeros(3);zeros(3),Cnb';zeros(3),zeros(3)];F=[F1,F2;zeros(6,15)]; %以上为kalman滤波模型参数F = F * T; %得集化temp1 = eye(15);disF = eye(15);for j = 1:10temp1 = F * temp1 / j;disF = disF + temp1;endtemp1 = Q * T;disQ = temp1;for j = 2:11temp2 = F * temp1;temp1 = (temp2 + temp2')/j;disQ = disQ + temp1;endZ(1) = Vx - gps_v(i,1); %量丈量为杂惯导与GPS的速度好、位子好Z(2) = Vy - gps_v(i,2);Z(3) = Vz - gps_v(i,3);Z(4) = (lat - gps_pos(i,1)) * Rmh; %纬经度化为位移,单位mZ(5) = (lon - gps_pos(i,2)) * Rnh * cos(lat);Z(6) = height - gps_pos(i,3);X = disF * X_o; %kalman滤波五个公式P = disF * P_k * disF'+ disQ;K = P * H'/( H * P * H'+ R);X_k = X + K * (Z - H * X);P_k = (I - K * H) * P;x_kf(i,1) = X_k(1)/pi*180; %仄台缺点角x_kf(i,2) = X_k(2)/pi*180;x_kf(i,3) = X_k(3)/pi*180;x_kf(i,4) = X_k(4); %速度缺点x_kf(i,5) = X_k(5);x_kf(i,6) = X_k(6);x_kf(i,7) = X_k(7); %位子缺点x_kf(i,8) = X_k(8);x_kf(i,9) = X_k(9);x_kf(i,10) = X_k(10)/pi*180*3600; %陀螺随机常值漂移,单位°/hx_kf(i,11) = X_k(11)/pi*180*3600;x_kf(i,12) = X_k(12)/pi*180*3600;x_kf(i,13) = X_k(13)*10^6/g; %加计随机常值偏偏置,单位ugx_kf(i,14) = X_k(14)*10^6/g;x_kf(i,15) = X_k(15)*10^6/g;p_kf(i,1) = sqrt(abs(P_k(1,1)))/pi*180;p_kf(i,2) = sqrt(abs(P_k(2,2)))/pi*180;p_kf(i,3) = sqrt(abs(P_k(3,3)))/pi*180;p_kf(i,4) = sqrt(abs(P_k(4,4)));p_kf(i,5) = sqrt(abs(P_k(5,5)));p_kf(i,6) = sqrt(abs(P_k(6,6)));p_kf(i,7) = sqrt(abs(P_k(7,7)));p_kf(i,8) = sqrt(abs(P_k(8,8)));p_kf(i,9) = sqrt(abs(P_k(9,9)));p_kf(i,10) = sqrt(abs(P_k(10,10)))/pi*180*3600;p_kf(i,11) = sqrt(abs(P_k(11,11)))/pi*180*3600;p_kf(i,12) = sqrt(abs(P_k(12,12)))/pi*180*3600;p_kf(i,13) = sqrt(abs(P_k(13,13)))*10^6/g;p_kf(i,14) = sqrt(abs(P_k(14,14)))*10^6/g;p_kf(i,15) = sqrt(abs(P_k(15,15)))*10^6/g;Vx = Vx - X_k(4); %速度矫正Vy = Vy - X_k(5);Vz = Vz - X_k(6);v(i,:) = [Vx, Vy, Vz];lat = lat - X_k(7); %位子矫正lon = lon - X_k(8);height = height - X_k(9);pos(i,:) = [lat, lon, height];Atheta = X_k(1); %kalman滤波预计得出的得准角thetaAgama = X_k(2); %kalman滤波预计得出的得准角gamaAfai = X_k(3); %kalman滤波预计得出的得准角faiCtn = [ 1, Afai, -Agama;-Afai, 1, Atheta;Agama, -Atheta, 1];Cnb = Cnb*Ctn; %革新姿态阵fai = atan(-Cnb(2,1) / Cnb(2,2));theta = asin(Cnb(2,3));gama = atan(-Cnb(1,3) / Cnb(3,3));if (Cnb(2,2) < 0)fai = fai + pi;elseif (fai < 0)fai = fai + 2*pi;endif (Cnb(3,3) < 0)if(gama > 0)gama = gama - pi;elsegama = gama + pi;endendatti(i,:) = [fai/pi*180, theta/pi*180, gama/pi*180];q(2) = sqrt(abs(1 + Cnb(1,1) - Cnb(2,2) - Cnb(3,3))) / 2; q(3) = sqrt(abs(1 - Cnb(1,1) + Cnb(2,2) - Cnb(3,3))) / 2; q(4) = sqrt(abs(1 - Cnb(1,1) - Cnb(2,2) + Cnb(3,3))) / 2; q(1) = sqrt(abs(1 - q(2) * q(2) - q(3) * q(3) - q(4) * q(4))); if (Cnb(2,3) < Cnb(3,2))q(2) = - q(2);endif (Cnb(3,1) < Cnb(1,3))q(3) = - q(3);endif (Cnb(1,2) < Cnb(2,1))q(4) = - q(4);endX_k(1:9) = 0;X_o=X_k;iend%%%画图%%%%%%%%%%t=1:datanumber;figure(1)subplot(311);plot(t,pos(:,1)*180/pi,'r',t,gps_pos(:,1)*180/pi,'b') title('纬度');xlabel('0.01s');ylabel('°');subplot(312);plot(t,pos(:,2)*180/pi,'r',t,gps_pos(:,2)*180/pi,'b') title('经度');xlabel('0.01s');ylabel('°');subplot(313);plot(t,pos(:,3),'r',t,gps_pos(:,3),'b')title('下度');xlabel('0.01s');ylabel('m');legend('拉拢滤波','GPS')figure(2)subplot(311);plot(t,v(:,1),'r',t,gps_v(:,1),'b')title('东背速度');xlabel('0.01s');ylabel('m/s'); subplot(312);plot(t,v(:,2),'r',t,gps_v(:,2),'b')title('北背速度');xlabel('0.01s');ylabel('m/s'); subplot(313);plot(t,v(:,3),'r',t,gps_v(:,3),'b')title('天背速度');xlabel('0.01s');ylabel('m/s'); legend('拉拢滤波','GPS')figure(3)subplot(311);plot(t,atti(:,1))title('航背角');xlabel('0.01s');ylabel('°'); subplot(312);plot(t,atti(:,2))title('俯俯角');xlabel('0.01s');ylabel('°'); subplot(313);plot(t,atti(:,3))title('横滚角');xlabel('0.01s');ylabel('°');figure(4)subplot(311);plot(t,p_kf(:,1))title('P航背角缺点');xlabel('0.01s');ylabel('度');subplot(312);plot(t,p_kf(:,2))title('P俯俯角缺点');xlabel('0.01s');ylabel('度'); subplot(313);plot(t,p_kf(:,3))title('P横滚角缺点');xlabel('0.01s');ylabel('度'); figure(5)subplot(311);plot(t,p_kf(:,4))title('P东背速度缺点');xlabel('0.01s');ylabel('m/s'); subplot(312);plot(t,p_kf(:,5))title('P北背速度缺点');xlabel('0.01s');ylabel('m/s'); subplot(313);plot(t,p_kf(:,6))title('P天背速度缺点');xlabel('0.01s');ylabel('m/s'); figure(6)subplot(311);plot(t,p_kf(:,7))title('P纬度缺点');xlabel('0.01s');ylabel('度'); subplot(312);plot(t,p_kf(:,8))title('P经度缺点');xlabel('0.01s');ylabel('度'); subplot(313);plot(t,p_kf(:,9))title('P下度缺点');xlabel('0.01s');ylabel('m'); figure(7)subplot(311);plot(t,p_kf(:,10))title('P东背陀螺');xlabel('0.01s');ylabel('度/小时'); subplot(312);plot(t,p_kf(:,11))title('P北背陀螺');xlabel('0.01s');ylabel('度/小时'); subplot(313);plot(t,p_kf(:,12))title('P天背陀螺');xlabel('0.01s');ylabel('度/小时'); figure(8)subplot(311);plot(t,p_kf(:,13))title('P东背加计');xlabel('0.01s');ylabel('ug'); subplot(312);plot(t,p_kf(:,14))title('P北背加计');xlabel('0.01s');ylabel('ug'); subplot(313);plot(t,p_kf(:,15))title('P天背加计');xlabel('0.01s');ylabel('ug');。
《惯性导航原理》第一次大作业一、 原理分析惯导系统为指北方位的平台系统,则利用比力方程以及陀螺提供的东、北、天三个比力数据,即可计算得到在每个数据采集点的平台即时速度,再通过经纬度的计算公式,就可以得到每个数据采集点平台的即时经纬度,以每个数据采集点为下一个采集点的起点,即可对速度和经纬度进行累计计算,从而得到平台在运动过程中任意时刻的速度和位置情况。
运动过程中任意时刻的速度和位置情况。
1.模型公式的推导载体相对地球运动时,载体相对地球运动时,加速度计测得的比力表达式,加速度计测得的比力表达式,加速度计测得的比力表达式,称为比力方程,称为比力方程,称为比力方程,方程如方程如下:下:g V V f epep ieep-´++=)2(vv (1)在指北方案中,平台模拟地理坐标系,将上式中平台坐标系用地理坐标系代入得:入得:t tt ett iettgV f V+´+-=)2(v v (2)系统中测量的是比力分量,将上式写成分量形式系统中测量的是比力分量,将上式写成分量形式=-+ (3) 又因为地球的自转角速率为:又因为地球的自转角速率为:(4)地理坐标系相对于地球坐标系的角速率为:地理坐标系相对于地球坐标系的角速率为:= (5)将(将(44)(5)两个式子带入()两个式子带入(33)式,即可得到如下方程组:)式,即可得到如下方程组:(6)2.速度计算作业要求只考虑水平通道,作业要求只考虑水平通道,因此只需要计算正东、因此只需要计算正东、因此只需要计算正东、正北两个方向的速度即可。
正北两个方向的速度即可。
正北两个方向的速度即可。
理理论上计算得到t x V 、t y V 后,再积分一次可得到速度值,即后,再积分一次可得到速度值,即ïîïíì+=+=òòt t y t y t ytt x t x tx V dt V V V dt V V 000但在本次计算过程中,三个方向的速度均是从零开始在各时间节点上的累加,并不是t的函数,因此速度计算可以由以下方程组实现:(7)此方程组表示了从第i 个采集点到第(个采集点到第(i+1i+1i+1)个采集点的速度递推公式。
北航实验报告封面(共8篇)北航惯性导航综合实验一实验报告实验一陀螺仪关键参数测试与分析实验加速度计关键参数测试与分析实验二零一三年五月十二日实验一陀螺仪关键参数测试与分析实验一、实验目的通过在速率转台上的测试实验,增强动手能力和对惯性测试设备的感性认识;通过对陀螺仪测试数据的分析,对陀螺漂移等参数的物理意义有清晰的认识,同时为在实际工程中应用陀螺仪和对陀螺仪进行误差建模与补偿奠定基础。
二、实验内容利用单轴速率转台,进行陀螺仪标度因数测试、零偏测试、零偏重复性测试、零漂测试实验和陀螺仪标度因数与零偏建模、误差补偿实验。
三、实验系统组成单轴速率转台、MEMS 陀螺仪(或光纤陀螺仪)、稳压电源、数据采集系统与分析系统。
四、实验原理1. 陀螺仪原理陀螺仪是角速率传感器,用来测量载体相对惯性空间的角速度,通常输出与角速率对应的电压信号。
也有的陀螺输出频率信号(如激光陀螺)和数字信号(把模拟电压数字化)。
以电压表示的陀螺输出信号可表示为:UGUG?0??kG??kGfG(a)?kG?G(1-1)式中fG(a)是与比力有关的陀螺输出误差项,反映了陀螺输出受比力的影响,本实验不考虑此项误差。
因此,式(1-1)简化为 UGUG?0??kG??kG?G(1-2)由(1-2)式得陀螺输出值所对应的角速度测量值:测量?UG?UG(0)(1-3) ??GkG对于数字输出的陀螺仪,传感器内部已经利用标度因数对陀螺仪模拟输出进行了量化,直接输出角速度值,即:测量??0??真值??G(1-4)?0是是陀螺仪的零偏,物理意义是输入角速度为零时,陀螺仪输出值所对应的角速度。
且UG(0)?kG?0 (1-5)?测量精度受陀螺仪标度因数kG、随机漂移?G、陀螺输出信号UG的检测精度和UG(0)的影响。
通常kG和UG(0)表现为有规律性,可通过建模与补偿方法消除,?G表现为随机特性,可通过信号滤波方法抵制。
因此,准确标定kG和UG(0)是实现角速度准确测量的基础。
惯性导航技术综合实验实验五惯性基组合导航及应用技术实验惯性/卫星组合导航系统车载实验一、实验目的①掌握捷联惯导/GPS组合导航系统的构成和基本工作原理;②掌握采用卡尔曼滤波方法进行捷联惯导/GPS组合的基本原理;③掌握捷联惯导/GPS组合导航系统静态性能;④掌握动态情况下捷联惯导/GPS组合导航系统的性能。
二、实验内容①复习卡尔曼滤波的基本原理(参考《卡尔曼滤波与组合导航原理》第二、五章);②复习捷联惯导/GPS组合导航系统的基本工作原理(参考以光衢编著的《惯性导航原理》第七章);三、实验系统组成①捷联惯导/GPS组合导航实验系统一套;②监控计算机一台。
③差分GPS接收机一套;④实验车一辆;⑤车载大理石平台;⑥车载电源系统。
四、实验内容1)实验准备①将IMU紧固在车载大理石减振平台上,确认IMU的安装基准面紧靠实验平台;②将IMU与导航计算机、导航计算机与车载电源、导航计算机与监控计算机、GPS接收机与导航计算机、GPS天线与GPS接收机、GPS接收机与GPS电池之间的连接线正确连接;③ 打开GPS 接收机电源,确认可以接收到4颗以上卫星; ④ 打开电源,启动实验系统。
2) 捷联惯导/GPS 组合导航实验① 进入捷联惯导初始对准状态,记录IMU 的原始输出,注意5分钟内严禁移动实验车和IMU ;② 实验系统经过5分钟初始对准之后,进入导航状态; ③ 移动实验车,按设计实验路线行驶;④ 利用监控计算机中的导航软件进行导航解算,并显示导航结果。
五、 实验结果及分析(一) 理论推导捷联惯导短时段(1分钟)位置误差,并用1分钟惯导实验数据验证。
1、一分钟惯导位置误差理论推导:短时段内(t<5min ),忽略地球自转0ie ω=,运动轨迹近似为平面1/0R =,此时的位置误差分析可简化为:(1) 加速度计零偏∇引起的位置误差:210.88022t x δ∇==m (2) 失准角0φ引起的误差:202 0.92182g t x φδ==m (3) 陀螺漂移ε引起的误差:330.01376g t x εδ==m 可得1min 后的位置误差值123 1.8157m x x x x δδδδ=++= 2、一分钟惯导实验数据验证结果:(1)纯惯导解算1min 的位置及位置误差图:lat0.01s 度lon0.01s度北向位移误差0.01sm 东向位移误差0.01sm(2)纯惯导解算1min 的速度及速度误差图:-100-50050Vx0.01s m /s020406080Vy0.01sm /s100020003000400050006000-0.4-0.3-0.2-0.10Vx 误差0.01s m /s100020003000400050006000-0.1-0.0500.050.1Vy 误差0.01sm /s实验结果分析:纯惯导解算短时间内精度很高,1min 的惯导解算的北向最大位移误差-2.668m ,东向最大位移误差-8.231m ,可见实验数据所得位置误差与理论推导的位置误差在同一数量级,结果不完全相同是因为理论推导时做了大量简化,而且实验时视GPS 为真实值也会带来误差;另外,可见1min 内纯惯导解算的东向速度最大误差-0.2754m/s ,北向速度最大误差-0.08027m/s 。
飞行力学大作业1理论推导方程在平面地球假设下,推导飞机质心在体轴系下的动力学方。
质心惯性加速度的基本方程是式(5.1.7),其中动点就是在转动参考系F E 中的O y 。
这样质心相r' 对于地球的速度,已用来表示。
这里假设地轴固定于惯性空间,且。
因此,的原点的E V 0ω= E F 加速度就是与地球转动有关的向心加速度。
数值比较表明,这一加速度和g 相比通常可以略去。
0a 而对于式(5.1.7)中的向心加速度项的情况也是一样的,,也通常省略。
在式(5.1.7)中剩下r ωω' 的两项中,而哥氏加速度为。
后者取决于飞行器速度的大小和方向,并且在轨道速E r V'= 2E E V ω 度时至多为10%g 。
当然在更高速度时可能更大。
所以保留此项。
最后质心的加速度可以简化为如下形式:2E E E CE EE E a V V ω=+ 有坐标转换知:(1)()()222()E E E E E E CB BE CE BE E E E BE E BE E E E B E E E E E E E B B B B B B B B Ba L a L V V L V L V V V V V V ωωωωωωω==+=+=+-+=++ 体轴系中的力方程为:f=m 而 f=+mg+TCB a B A 设飞机的迎角为,侧滑角为,则体轴系的气动力表示为:αβ cos cos cos sin sin ()()sin cos 0sin cos sin sin cos x y BW W y Z z A D D A L A L L C C A L a a a L αβαβααβββββ----⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==--=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦重力在牵连垂直坐标系下为:(3)00V g g ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦设发动机的安装角为,发动机的推力在机体坐标系的表示如下:τ (4)cos 0sin Z x y T T T T T ττ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦由坐标转换可知 :(5)sin sin cos cos cos B BV V mg mL g mg θφθφθ-⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦所以由上述公式可知:+= m = m [] (6)sin sin cos cos cos mg θφθφθ-⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦X Y Z ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦CB a ()E E E B B B V V ωω++ 其中:(7)cos cos cos sin sin cos cos 0sin cos 00sin 0sin cos sin sin cos 0sin cos E B BW u V V V v L V w a a a a αβαβααβββββββ--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥====⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦(8)B p q r ω⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦E B EE B BE B p q r ω⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(9)带入原方程,可得其质心的动力学方程:cos sin [()()]cos sin [()()]sin cos cos [()()]EE x B B E Ey B B E Ez B B A T mg m u q q w r r v A mg m v r r u p p w A T mg m w p p v q q u τθθφτθφ+-=++-++=++-+-+=++-+ (10)(2)飞机的转动动力学方程:由G h = (11)且I I I h R R dm=⎰()I IB B B B R L R R ω=+ (12)由坐标变换知道:B BI I BI I IB B BI I IB B B h L h L R L R dm L R L R dmω==+⎰⎰ (13)由书上的(4.7,4)的规则知道:B BI I IB R L R L = (14)B B B B B B h R R dm R R dmω=+⎰⎰ (15)因为飞机一般认为是刚体飞机,故其变形分量一般认为为0,所以:(16)B B B B B B B B Bxxy zx B xyyyz zx yzz h R R dm R R dm I I I I I I I I I ωωκωκ==-=⎡⎤--⎢⎥=--⎢⎥⎢⎥--⎣⎦⎰⎰(17)22==0))()()()()x xy zx B xyyyz zx yzz xy yz r r x zx y z y yr ry zx z x xzr r z zx x y x y I I I I I I I I I I I L I p I r pq I I qr r h q h M I qI r p I I rp r h p h N I rI p qr I I pq q h p h κ⎡⎤--⎢⎥=--⎢⎥⎢⎥--⎣⎦=-+---+=----+-=-----+∑∑∑∑∑∑ ((考虑发动机转子的转动惯量,可得(18)r r r B B B h κω=(19)r r B B B BB B B B h R R dm h h ωκω=+=+∑∑⎰ 可知在体轴系下的各转矩为:r r B BI I B B B B B B B B B BB B B G L G h h h h ωκωκωωκωω==+=++++∑∑(20)000x xy zx x xy zx x xy zx xy yyz xy y yz xy yyz zxyz z zx yz z zx yz z L I I I p I I I p r q I I I p M I I I q I I I q r p I I I q N I I I r I I I r q p I I I r ⎡⎤⎡⎤⎡⎤-------⎡⎤⎡⎤⎡⎤⎡⎤⎡⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=--+--+---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-------⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 000r r xx r r y y r r z z h r q h h r p h h q p h ⎤⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥⎢⎥++-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦∑∑∑∑∑∑ (3)(21)()E V VB B B V L V W =+ ;(22)B u V v w ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦y x B z W W W W ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦()cos cos ()(sin sin cos cos sin )()(cos sin cos sin sin )E x y z xu W v W w W θψφθψφψφθψφψ=+++-+++ ()cos sin ()(sin sin sin cos cos )()(cos sin sin sin cos )E x y z yu W v W w W θψφθψφψφθψφψ=++++++-(23)()sin ()cos cos cos E x y zu W v W w θθφθ=++++ (4)由公式32V i j k ωωφθψ-=++ 再根据欧拉角的矩阵变化知(24)100i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦30cos sin j φφ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦2sin cos sin cos cos k θθφθφ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦当和均予忽略时,则[P ,Q ,R]=[p ,q ,r],即F B 相对于F I 的角速度,方程可写成如下形式:V ωE ω(25)10sin 0cos cos sin 0sin cos cos P Q R θφφθφθφθφψ⎡⎤-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦通过求逆,知:(26)1sin tan cos tan 0cos sin 0sin sec cos sec P Q R φφθφθθφφψφθφθ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ (5)当无风和具有对称面的刚体飞机,其六自由度运动方程为:质心动力学方程:(27)cos sin [()()]cos sin [()()]sin cos cos [()()]EE x B B E E y B B E Ez B B A T mg m u q q w r r v A mg m v r r u p p w A T mg m w p p v q q u τθθφτθφ+-=++-++=++-+-+=++-+ 若忽略地球的自转则可得:(28)cos sin []cos sin []sin cos cos []x y z A T mg m uqw rv A mg m vru pw A T mg m wpv qu τθθφτθφ+-=+-+=+--+=+- 绕质心转动的动力学方:由于具有对称面,且可以忽略有:B κ==0xy yz I I 根据(2)推出其简化的动力学方程为:(29)22))()()()()x zx y z y zx z x z zx x y L I p I r pq I I qrM I qI r p I I rp N I rI p qr I I pq =-+--=----=---- ((质心运动学方程:根据(3)可知,(30)()cos cos ()(sin sin cos cos sin )()(cos sin cos sin sin )()cos sin ()(sin sin sin cos cos )()(cos sin sin sin cos )()sin ()cos cos cos E x y z E x y z E x y xu W v W w W yu W v W w W zu W v W w θψφθψφψφθψφψθψφθψφψφθψφψθθφθ=+++-+++=++++++-=++++ 由于是无风,故(31)0x y z W W W ===(32)cos cos (sin sin cos cos sin )(cos sin cos sin sin )cos sin (sin sin sin cos cos )(cos sin sin sin cos )sin cos cos cos E E E xu v w yu v w zu v w θψφθψφψφθψφψθψφθψφψφθψφψθθφθ=+-++=+++-=++ 绕质心转动的运动学方程:根据(4)可知(33)sin tan cos tan cos sin sin sec cos sec P Q R Q R Q R φφθφθθφφψφθφθ=++=-=+ 二、小扰动线化设基准运动为对称定常直线水平飞行,假设飞机是具有对称面的刚体。
惯性导航技术综合实验实验五惯性基组合导航及应用技术实验惯性/卫星组合导航系统车载实验一、实验目的①掌握捷联惯导/GPS组合导航系统的构成和基本工作原理:②掌握采用卡尔曼波波方法进行捷联惯导/GPS组合的基本原理:③掌握捷联惯导/GPS组合导航系统静态性能:④掌握动态情况下捷联惯导/GPS组合导航系统的性能。
二、实验内容①复习卡尔曼滤波的基本原理(参考《卡尔曼滤波与组合导航原理》第二、五章);②复习捷联惯导/GPS组合导航系统的基本工作原理(参考以光衢编著的《惯性导航原理》第七章);三、实验系统组成①捷联惯导/GPS组合导航实验系统一套:②监控计算机一台。
③差分GPS接收机一套:④实验车一辆:⑤车载大理石平台:⑥车载电源系统。
四、实验内容D实验准备①将IMU紧固在车载大理石减振平台上,确认IMU的安装基准面紧靠实验平台;②将IMU与导航计算机、导航计算机与车载电源、导航计算机与监控计算机、GPS接收机与导航计算机、GPS天线与GPS接收机、GPS接收机与GPS电池之间的连接线正确连接;③打开GPS接收机电源,确认可以接收到4颗以上卫星;④打开电源,启动实验系统。
2)捷联惯导/GPS组合导航实验①进入捷联惯导初始对准状态,记录IMU的原始输出,注意5分钟内严禁移动实验车和IMU;②实验系统经过5分钟初始对准之后,进入导航状态;③移动实验车,按设计实验路线行驶;④利用监控计算机中的导航软件进行导航解算,并显示导航结果。
五、实验结果及分析(一)理论推导捷联惯导短时段(1分钟)位置误差,并用1分钟惯导实验数据验证。
1、一分钟惯导位置误差理论推导:短时段内(t<5min),忽略地球自转绍。
=0,运动轨迹近似为平面1/R = O,此时的位置误差分析可简化为:Vr2(1)加速度计零偏V引起的位置误差:Jx,= —= 0.8802 m2(2)失准角我引起的误差:3X2=^-= 0.9218m(3)陀螺漂移£引起的误差:= 0.0137 m6可得1min后的位置误差值5x =+ J.r2 + 5x. = 1.8157m2、一分钟惯导实验数据验证结果:(1)纯惯导解算1min的位置及位置误差图:(2)纯惯导解算1min的速度及速度误差图:vy 8060| 40200 1000 2000 3000 4000 5000 60000.01s实验结果分析:纯惯导解算短时间内精度很高,1min的惯导解算的北向最大位移误差-2.668m,东向最大位移误差-8.231m,可见实验数据所得位置误差与理论推导的位置误差在同一数量级,结果不完全相同是因为理论推导时做了大量简化,而且实验时视GPS为真实值也会带来误差;另外,可见1min内纯惯导解算的东向速度最大误差-0.2754m/s,北向速度最大误差-0.08027m/So(-)选取IMU前5分钟数据进行对准实验。
惯性导航作业一、数据说明:1:惯导系统为指北方位的捷连系统。
初始经度为116.344695283度、纬度为39.975172度,高度h为30米。
初速度v0=[-9.993908270;0.000000000;0.348994967]。
2:jlfw中为600秒的数据,陀螺仪和加速度计采样周期分别为为1/100秒和1/100秒。
3:初始姿态角为[2 1 90](俯仰,横滚,航向,单位为度),jlfw.mat中保存的为比力信息f_INSc(单位m/s^2)、陀螺仪角速率信息wib_INSc(单位rad/s),排列顺序为一~三行分别为X、Y、Z向信息.4: 航向角以逆时针为正。
5:地球椭球长半径re=6378245;地球自转角速度wie=7.292115147e-5;重力加速度g=g0*(1+gk1*c33^2)*(1-2*h/re)/sqrt(1-gk2*c33^2);g0=9.7803267714;gk1=0.00193185138639;gk2=0.00669437999013;c33=sin(lat纬度);二、作业要求:1:可使用MATLAB语言编程,用MATLAB编程时可使用如下形式的语句读取数据:load D:\...文件路径...\jlfw,便可得到比力信息和陀螺仪角速率信息。
用角增量法。
2:(1) 以系统经度为横轴,纬度为纵轴(单位均要转换为:度)做出系统位置曲线图;(2) 做出系统东向速度和北向速度随时间变化曲线图(速度单位:m/s,时间单位:s);(3) 分别做出系统姿态角随时间变化曲线图(俯仰,横滚,航向,单位转换为:度,时间单位:s);以上结果均要附在作业报告中。
3:在作业报告中要写出“程序流程图、现阶段学习小结”,写明联系方式。
(注意程序流程图不是课本上的惯导解算流程,而是你程序分为哪几个模块、是怎样一步步执行的,什么位置循环等,让别人根据该流程图能够编出相应程序) (学习小结按条写,不用写套话) 4:作业以纸质报告形式提交,附源程序。
惯性测量单元安装误差系数标定实验二零一三年六月十日惯性测量单元安装误差系数标定试验一、实验目的1、掌握惯性测量单元(inertial measurement unit ,IMU )的标度系数、安装误差、零偏的标定方法;2、利用现有实验条件实现实验过程的设计。
二、实验内容利用单轴速率转台,进行IMU 的安装误差系数标定,并通过公式计算该安装误差系数。
三、实验系统组成单轴速率位置转台、MEMS 惯性测量单元、稳压电源、数据采集系统。
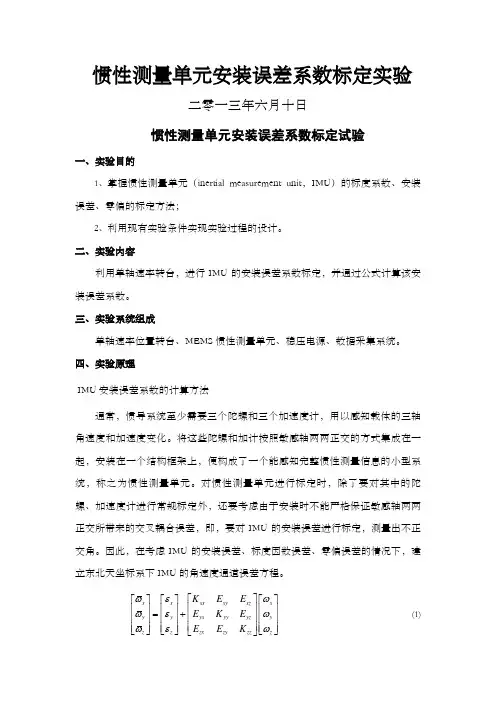
四、实验原理IMU 安装误差系数的计算方法通常,惯导系统至少需要三个陀螺和三个加速度计,用以感知载体的三轴角速度和加速度变化。
将这些陀螺和加计按照敏感轴两两正交的方式集成在一起,安装在一个结构框架上,便构成了一个能感知完整惯性测量信息的小型系统,称之为惯性测量单元。
对惯性测量单元进行标定时,除了要对其中的陀螺、加速度计进行常规标定外,还要考虑由于安装时不能严格保证敏感轴两两正交所带来的交叉耦合误差,即,要对IMU 的安装误差进行标定,测量出不正交角。
因此,在考虑IMU 的安装误差、标度因数误差、零偏误差的情况下,建立东北天坐标系下IMU 的角速度通道误差方程。
x x xx xy xz x y y yxyy yz y z z zx zy zz z K E E E K E E E K ωεωωεωωεω⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ (1)式中i ω为惯性系统i 轴向陀螺输出角速度,i ω为i 轴向的输入角速度;i ε为i 轴向陀螺零偏;ii K 为i 轴向陀螺标度因数;ij E 为角速度通道的安装误差系数,i 和j 为坐标轴X ,Y ,Z 的统称。
设输入矩阵为x1xn y1yn I z1zn ...11ωωωωωω⎡⎤⎢⎥⎢⎥Ω=⎢⎥⎢⎥⎣⎦,输出矩阵为x1xn o y1yn z1zn ...ωωωωωω⎡⎤⎢⎥Ω=⎢⎥⎢⎥⎣⎦,则标度因数、安装误差系数与陀螺漂移组成的矩阵可按最小二乘法估计为: 类似,可计算加速度计的标度因数、安装误差系数与加计零偏。
北航惯性导航综合实验三实验报告惯性导航技术综合实验实验三惯性导航综合实验实验3.1 初始对准实验一、实验目的结合已经采集并标定好的惯性传感器数据进行粗对准,了解实现对准的过程;通过比较不同传感器数据的对准结果,进一步认识惯性传感器性能在导航系统中的重要地位。
为在实际工程设计中针对不同应用需求下采取相应的导航系统方案提供依据。
二、实验内容利用加速度计输出计算得到系统的初始姿态,利用陀螺输出信号计算航向角。
对比利用不同的惯性传感器数据计算所得的不同结果。
三、实验系统组成MEMS IMU(或其他类型IMU)、稳压电源、数据采集系统与分析系统。
四、实验原理惯导系统在开始进行导航解算之前需要进行初始对准,水平对准的本质是将重力加速度作为对准基准,其对准精度主要取决于两个水平加速度计的精度,加速度计的零位输出将会造成水平对准误差;方位对准最常用的方位是罗经对准,其本质是以地球自转角速度作为对准基准,影响对准精度的主要因素是等效东向陀螺漂移。
(1) 其中,分别为当前时刻的俯仰角和横滚角计算值。
水平对准误差和方位对准误差如下所示:,(2) 五、实验步骤及结果1、实验步骤:采集静止状态下水平加速度计输出,按下式计算其平均值。
(3) 其中,为前n个加计输出均值;为前n-1个加计输出均值;为当前时刻加计输出值。
利用加计平均值来计算系统初始俯仰角和横滚角(4) 其中,分别为当前时刻的俯仰角和横滚角计算值。
2、实验结果与分析:2.1、用MIMS IMU的加速度计信息计算(1)俯仰角和横滚角图:(2)失准角:2.2、实验结果分析以上计算是基于MIMS IMU静止时data2进行的初始对准,与data2给定的初始姿态角相差不大。
六、源程序clear clc g = 9.__14; a=load('E:\郭凤玲\chushiduizhun\data2.txt'); ax=a(:,4)'; ay=a(:,5)'; az=a(:,6)'; %初始值ax0(1)=ax(1)/1000*g; %%%%转化单位,由mg转化为m/s^2 ay0(1)=ay(1)/1000*g; az0(1)=az(1)/1000*g; theta(1)=asin(ay(1)/az(1)); gama(1)=-asin(ax(1)/az(1)); for i=2:__ ax0(i)=ax0(i-1)+(ax(i)-ax0(i-1))/i; ay0(i)=ay0(i-1)+(ay(i)-ay0(i-1))/i; az0(i)=az0(i-1)+(az(i)-az0(i-1))/i; theta(i)=asin(ay0(i)/az0(i));gama(i)=-asin(ax0(i)/az0(i)); end detfaix=mean(ay0)/g; detfaiy=mean(-ax0)/g; t=1:__; plot(t,theta,'r',t,gama,'b') title('俯仰角和横滚角');ylabel('弧度(rad)'); legend('俯仰角','横滚角') 实验3.2 惯性导航静态实验一、实验目的1、掌握捷联惯导系统基本工作原理2、掌握捷联惯导系统捷联解算方法3、了解捷联惯导系统误差传递规律和方程二、实验原理捷联惯性导航系统(SINS)的导航解算流程如图1所示。
基于运动规划的惯性导航系统动态实验二零一三年六月十日实验4.1 惯性导航系统运动轨迹规划与设计实验一、实验目的为进行动态下简化惯性导航算法的实验研究,进行路径和运动状态规划,以验证不同运动状态下惯导系统的性能。
通过实验掌握步进电机控制方法,并产生不同运动路径和运动状态。
二、实验内容学习利用6045B 控制板对步进电机进行控制的方法,并控制电机使运动滑轨产生定长运动和不同加速度下的定长运动。
三、实验系统组成USB_PCL6045B 控制板(评估板)、运动滑轨和控制计算机组成。
四、实验原理IMU安装误差系数的计算方法USB_PCL6045B 控制板采用了USB 串行总线接口通信方式,不必拆卸计算机箱就可以在台式机或笔记本电脑上进行运动控制芯片PCL6045B 的学习和评估。
USB_PCL6045B 评估板采用USB 串行总线方式实现评估板同计算机的数据交换,由评估板的FIFO 控制回路完成步进电机以及伺服电机的高速脉冲控制,任意 2 轴的圆弧插补,2-4 轴的直线插补等运动控制功能。
USB_PCL6045B 评估板上配置了全部PCL6045B 芯片的外部信号接口和增量编码器信号输入接口。
由USB_PCL6045B 评估测试软件可以进行PCL6045B 芯片的主要功能的评估测试。
图4-1-1USB_PCL6045B 评估板原理框图如图4-1-1 所示,CN11 接口主要用于外部电源连接,可以选择DC5V 单一电源或DC5V/24V 电源。
CN12 接口是USB 信号接口,用于USB_PCL6045B 评估板同计算机的数据交换。
USB_PCL6045B 评估板已经完成对PCL6045B 芯片的底层程序开发和硬件资源与端口的驱动,并封装成156 个API 接口函数。
用户可直接在VC 环境下利用API 接口函数进行编程。
五、实验内容1、操作步骤1)检查电机驱动电源(24V)2)检查USB_PCL6045B 控制板与上位机及电机驱动器间的连接电缆3)启动USB_PCL6045B 控制板评估测试系统检查系统是否正常工作。
导航原理作业(惯性导航部分)作业内容需包括:1. 题目内容(即本页)2. 程序设计说明及代码3. 计算或仿真结果及分析4. 仿真中遇到的问题或体会一枚导弹采用捷联惯性导航系统,三个速率陀螺仪Gx, Gy, Gz 和三个加速度计 Ax, Ay, Az 的敏感轴分别沿着着弹体坐标系的Xb, Yb, Zb 轴。
初始时刻该导弹处在北纬45.75度,东经126.63度。
第一种情形:正对导弹进行地面静态测试(导弹质心相对地面静止)。
初始时刻弹体坐标系和地理坐标系重合,如图所示,弹体的Xb 轴指东,Yb 轴指北,Zb 轴指天。
此后弹体坐标系 Xb-Yb-Zb 相对地理坐标系的转动如下:首先,弹体绕 Zb (方位轴)转过 -10 度; 接着,弹体绕 Xb (俯仰轴)转过 15 度; 然后,弹体绕 Yb (滚动轴)转过 20 度; 最后弹体相对地面停止旋转。
请分别用方向余弦矩阵和四元数两种方法计算:弹体经过三次旋转并停止之后,弹体上三个加速度计Ax, Ay, Az 的输出。
取重力加速度的大小g = 9.8m/s 2。
第二种情形:导弹正在飞行中。
初始时刻弹体坐标系仍和地理坐标系重合;且导弹初始高度200m ,初始北向速度 1800 m/s ,初始东向速度和垂直速度都为零。
陀螺仪和加速度计的输出都为脉冲数形式,陀螺输出的每个脉冲代表 0.00001弧度的角增量。
加速度计输出的每个脉冲代表1μg ,1g = 9.8m/s 2。
陀螺仪和加速度计输出的采样频率都为10Hz ,在200秒内三个陀螺仪和三个加速度计的输出存在了数据文件gaout.mat 中,内含一矩阵变量ga ,有2000行,6列。
每一行中的数据代表每个采样时刻三个陀螺Gx, Gy, Gz 和三个加速度计Ax, Ay, Az将地球视为理想的球体,半径 6371.00公里,且不考虑仪表误差,也不考虑弹体高度对重力加速度的影响。
选取弹体的姿态计算周期为0.1秒,速度和位置的计算周期为1秒。
《惯性导航原理》第一次大作业1 数据说明惯导系统为指北方位的平台系统,运动过程中系统高度不变。
(1) 系统初始信息初始位置经度(º)纬度(º)高度(m)116.34369207640.16256540237.74319初始速度东向速度(m/s)北向速度(m/s)天向速度(m/s)0.00.00.0初始姿态航向角(º)俯仰角(º)横滚角(º)152.08690.5894-0.8758(2) 数据格式文件fw.mat中保存的为比力信息f(单位:m/s^2)和陀螺仪角速率信息w(单位:rad/s),排列顺序为一~三行分别为东、北、天向信息,共1200秒数据,陀螺仪和加速度计采样周期为0.01秒。
使用MATLAB编程时可使用如下形式的语句读取数据:“load 文件路径...\fw”,可得到变量名为f的比力信息和变量名为w的陀螺仪角速率信息。
文件fw.dat中数据与fw.mat文件中数据相同,只是数据格式不同,fw.dat数据:第一列:数据包序号,第二至四列:分别为东、北、天向陀螺仪角速率信息w(单位:rad/s),第五至七列:分别为东、北、天向比力信息f(单位:m/s^2).用MATLAB编程时使用如下形式的语句读取数据:a=load('文件路径/fw.dat');w =a(:,2:4)';f =a(:,5:7)';可得到变量名为f的比力信息和变量名为w的陀螺仪角速率信息(与fw.mat格式文件得到的信息相同)。
提示:导航过程中只考虑水平通道。
2 作业要求作业以纸质报告形式提交。
具体要求为在报告第一页上写明本人姓名、学号、联系方式,报告中包含以下内容一、“原理分析”给出对本次作业相关原理及公式的具体分析。
二、“程序流程图”在原理分析基础上画出程序流程图,并对程序流程图结构进行文字说明。
三、“导航结果”以经度为横轴,纬度为纵轴(单位均转换为:度)作出系统位置坐标曲线图;以时间为横轴(单位:秒),东向和北向速度为纵轴作出系统速度随时间变化曲线图;以列表形式给出系统纬度、经度、东向速度、北向速度的终点值。
惯性导航基础课程大作业报告(一)光纤陀螺误差建模与分析班级:111514姓名:学号2014年5月26日一.系统误差原理图二.系统误差的分析(一)漂移引起的系统误差1. εx ,εy ,εz 对东向速度误差δVx 的影响clc;clear all; t=1:0.01:25; g=9.8;L=pi/180*39;Ws=2*pi/84.4*60; Wie=2*pi/24; R=g/(Ws)^2; e=0.1*180/pi;mcVx1=e*g*sin(L)/(Ws^2-Wie^2)*(sin(Wie*t)-Wie*sin(Ws*t)/Ws);mcVx2=e*((Ws^2-(Wie^2)*((cos(L))^2))/(Ws^2-Wie^2)*cos(Ws*t)-(Ws^2)*((sin(L))^2)*cos(Wi e*t)/(Ws^2-Wie^2)-(cos(L))^2);mcVx3=(sin(L))*(cos(L))*R*e*((Ws^2)*cos(Wie*t)/(Ws^2-Wie^2)-(Wie^2)*cos(Ws*t)/(Ws^2-Wi e^2)-1);plot(t,[mcVx1',mcVx2',mcVx3']); title('Ex,Ey,Ez 对Vx 的影响'); xlabel('时间t'); ylabel('Vx(t)');0,δλδL ,v v δδlegend('Ex-mcVx1','Ey-mcVx2','Ez-mcVx3');grid;axis square;分析:εx,εy,εz对东向速度误差δVx均有地球自转周期的影响,εx,εy还会有舒勒周期分量的影响,其中,εy对δVx的影响较大。
2.εx,εy,εz对东向速度误差δVy的影响clc;clear all;t=1:0.01:25;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;e=0.1*180/pi;mcVy1=e*g*(cos(Wie*t)-cos(Ws*t))/(Ws^2-Wie^2);mcVy2=g*sin(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t));mcVy3=g*cos(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t));plot(t,[mcVy1',mcVy2',mcVy3']);title('Ex,Ey,Ez对Vy的影响');xlabel('时间t');ylabel('Vy(t)');legend('Ex-mcVy1','Ey-mcVy2','Ez-mcVy3');grid;axis square;分析:εx,εy,εz对北向速度误差δVy均有地球自转周期,舒勒周期分量的影响。
其中,εx对δVy的影响较大;εy,εz产生的影响几乎相近。
3.εx,εy,εz对东向速度误差δL的影响clc;clear all;t=1:0.01:25;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);mcL1=Ws^2*0.1/a*(d/Wie-f/Ws);mcL2=(Ws^2*Wie*b/a*(h/Ws^2-e/Wie^2)+b/Wie)*0.1;mcL3=(Ws^2*c*e/Wie/a-Wie*c*h/a-c/Wie)*0.1;plot(t,[mcL1',mcL2',mcL3']);title('Ex,Ey,Ez对mcL的影响');xlabel('时间t');ylabel('mcL(t)');legend('Ex-mcL1','Ey-mcL2','Ez-mcL3');grid;分析:εx,εy,εz对纬度误差δL均有地球自转周期的影响,εx还会有舒勒周期分量的影响。
4.εx,εy,εz对东向速度误差δλ的影响clc;clear all;t=1:0.01:50;pi=3.14;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);mcLONG1=(tan(L)/Wie*(1-e)-Wie*c*h/a)*0.1;mcLONG2=(sec(L)*(Ws^2-Wie^2*c^2)*f/Ws/a-Ws^2*tan(L)*b*d/Wie/a-t*c)*0.1;mcLONG3=(Ws^2*b*d/Wie/a-Wie^2*b*f/a/Ws-t*b)*0.1;plot(t,[mcLONG1',mcLONG2',mcLONG3']);title('Ex,Ey,Ez对mcLONG.的影响');xlabel('时间t');ylabel('mcLONG.(t)');legend('Ex-mcLONG.1','Ey-mcLONG.2','Ez-mcLONG.3');grid;axis square;分析:εx,εy,εz对经度误差δλ均有地球自转周期的影响,εy还会有舒勒周期分量的影响,其中,εy,εz还产生了随时间累积的分量。
5.εx,εy,εz对东向速度误差δφX的影响clc;clear all;t=1:0.01:25;pi=3.14;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);mcAngle1=(Ws*f-Wie*d)/a*0.1;mcAngle2=Wie*b*(e-h)/a*0.1;mcAngle3=Wie*c*(h-e)/a*0.1;plot(t,[mcAngle1',mcAngle2',mcAngle3']);title('Ex,Ey,Ez对mcAngle的影响');xlabel('时间t');ylabel('mcAngle(t)');legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');grid;axis square;分析:εx,εy,εz对水平方位误差φx均有地球自转周期,舒勒周期分量的影响,其中,εx对φx产生的影响最大。
5.εx,εy,εz对东向速度误差δφY的影响clc;clear all;t=1:0.01:25;pi=3.14;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);mcAngle1=Wie*b*(h-e)/a*0.1;mcAngle2=((Ws^2-Wie^2*c^2)/Ws/a*f-Wie*b^2/a*d)*0.1;mcAngle3=Wie*b*c/a*(d-Wie/Ws*f)*0.1;plot(t,[mcAngle1',mcAngle2',mcAngle3']);title('Ex,Ey,Ez对mcAngle y的影响');xlabel('时间t');ylabel('mcAngle y(t)');legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');grid;axis square;分析:εx,εy,εz对水平方位误差φy均有地球自转周期的影响,而εx,εy还产生了舒勒周期分量的影响,其中,εy对φy 产生的影响最大。
5.εx,εy,εz对东向速度误差δφZ的影响clc;clear all;t=1:0.01:25;pi=3.14;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);mcAngle1=(sec(L)/Wie*(1-e)+Wie*b*b/c*(h-e)/a)*0.1;mcAngle2=(Wie^2*b*c-Ws^2*b/c)/a*(d/Wie-f/Ws)*0.1;mcAngle3=((Ws^2-Wie^2*c^2)*d/Wie/a-Wie^2*b^2*f/Ws/a)*0.1;plot(t,[mcAngle1',mcAngle2',mcAngle3']);title('Ex,Ey,Ez对mcAngle z的影响');xlabel('时间t');ylabel('mcAngle z(t)');legend('Ex-mcAngle1','Ey-mcAngle2','Ez-mcAngle3');grid;分析:εx,εy,εz对方位姿态误差φz均有地球自转周期的影响,而εy还产生了舒勒周期分量的影响,其中,εx对φz产生的影响最大。
(二) 加速度计零偏引起的系统误差1. Δx对φy,φz以及Δy对φx的影响clc;clear all;t=1:0.01:25;g=9.8;L=pi/180*39;Ws=2*pi/84.4*60;Wie=2*pi/24;R=g/(Ws)^2;a=Ws^2-Wie^2;b=sin(L);c=cos(L);d=sin(Wie*t);e=cos(Wie*t);f=sin(Ws*t);h=cos(Ws*t);amc=0.0001*g;mcAnglez=b/c/g*(1-h)*amc*180/pi*3600;mcAngley=(1-h)/g*amc*180/pi *3600;mcAnglex=-(1-h)/g*amc*180/pi *3600;subplot(311);plot(t,mcAnglex,'r-');xlabel('时间t');ylabel('mcAnglex (t)');legend('amcy-mcAnglex');grid;subplot(312);plot(t,mcAngley,'g-');xlabel('时间t');ylabel('mcAngley (t)');legend('amcx-mcAngley');grid;subplot(313);plot(t,mcAnglez,'b-');xlabel('时间t');ylabel('mcAnglez (t)');legend('amcx-mcAnglez');grid;分析:Δx对φy,φz以及Δy对φx的影响包含了常值分量和舒乐振荡分量。