爱普生机器人初级教学
- 格式:ppt
- 大小:3.34 MB
- 文档页数:67





技能培训专题爱普生4轴机器人培训爱普生公司是全球领先的科技企业,其4轴机器人在工业自动化生产线上发挥着极为重要的作用,越来越多的企业开始使用4轴机器人进行生产。
为了满足企业对4轴机器人的需求,爱普生公司特意开设了4轴机器人培训课程,旨在提高企业员工的技能水平,确保企业生产的稳定性与效率,提升企业的竞争力。
本次培训的主要内容如下:一、4轴机器人的基本原理4轴机器人是由机械臂、控制系统、传感器和执行器等部分组成的自动化系统,其工作原理与人类肢体运动的原理相似。
控制系统控制机械臂的运动,传感器感知环境信息,并向控制系统提供反馈信号,执行器负责完成任务。
了解4轴机器人的基本原理是进行后续操作的重要前提。
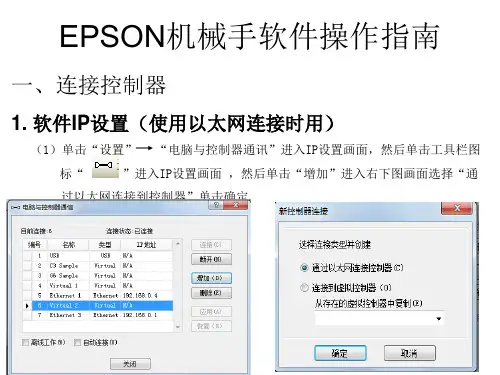
二、4轴机器人的操作流程了解4轴机器人的操作流程是进行4轴机器人操作的必要前提。
4轴机器人的操作流程包括机械臂的安装与拆卸、控制系统的启动和操作、传感器的校准与使用等。
在培训中,讲师将通过图文结合的方式,详细教授4轴机器人的操作流程。
三、4轴机器人的故障排除4轴机器人在生产过程中可能会出现某些故障,如机械臂无法运动、传感器故障、控制系统异常等。
了解4轴机器人的常见故障及其排除方式,可以有效提高机器人的使用寿命和生产效率。
在本次培训中,讲师将通过实际案例,讲解4轴机器人的故障排除方法。
四、4轴机器人的应用案例4轴机器人在工业自动化领域有着广泛的应用,如汽车、机械制造、电子生产等行业。
通过4轴机器人的应用案例,可以帮助学员了解4轴机器人的实际应用价值,进一步提高学员的学习积极性和学习效果。
通过学习本次4轴机器人培训课程,企业员工可以在工业自动化生产线上熟练操作4轴机器人,提高工作效率,减少人力成本,确保产品质量和生产效率,进而提高企业的市场竞争力。