PLC程序控制流程图范例
- 格式:doc
- 大小:118.00 KB
- 文档页数:5

PLC流程图法编程及实例可编程逻辑控制器(PLC)是一种广泛应用于工业自动化领域的设备,它通过接收输入信号,执行内部程序,从而控制输出信号,实现对设备的控制。
PLC编程的方法有很多种,其中,流程图法是一种常用的编程方法。
本文将介绍PLC流程图法编程的基本概念、优点、实例及应用实践经验。
PLC流程图法编程是一种图形化的编程语言,它将PLC程序转换成直观的流程图形式,通过在流程图中定义输入、输出变量,以及各个步骤之间的逻辑关系,来实现对PLC程序的编写和控制。
流程图法编程具有直观易懂、易于学习、易于维护等优点,因此,它成为了很多工程师和技术人员首选的PLC编程方法。
直观易懂:流程图使用图形化的方式来表示PLC程序,可以直观地展示程序的结构和逻辑关系,方便工程师和技术人员理解和分析。
易于学习:相比于传统的文本编程语言,流程图法编程更加简单易懂,即使是没有PLC编程经验的人也可以快速上手。
易于维护:在PLC程序调试过程中,流程图法可以更快速地找到程序中的错误和漏洞,方便工程师和技术人员进行程序的修改和维护。
提高效率:使用流程图法编程,可以减少程序调试的时间和成本,提高PLC程序的开发效率。
下面以一个简单的PLC程序为例,介绍如何使用流程图法进行编程。
实例:设计一个控制设备,当按下启动按钮后,设备开始工作,当按下停止按钮后,设备停止工作。
输入变量:启动按钮(X0)、停止按钮(X1)在绘制流程图时,我们需要将输入变量和输出变量在图中表示出来,并使用图形符号来表示输入输出之间的逻辑关系。
根据上面的实例,我们可以绘制如下流程图:开始 -->启动按钮(X0) -->设备状态(Y0) -->工作| ||---------->停止按钮(X1) <--|设备状态(Y0) -->工作状态 <--停止状态 <--结束根据流程图,我们可以编写如下的PLC程序:LD X0 //检查启动按钮是否按下OUT Y0 //将设备状态输出为工作状态LD X1 //检查停止按钮是否按下OUT Y0 //将设备状态输出为停止状态在编写PLC程序时,有些问题需要特别注意:变量的命名:为了避免程序出错和便于维护,变量命名要规范、有含义、易记忆。
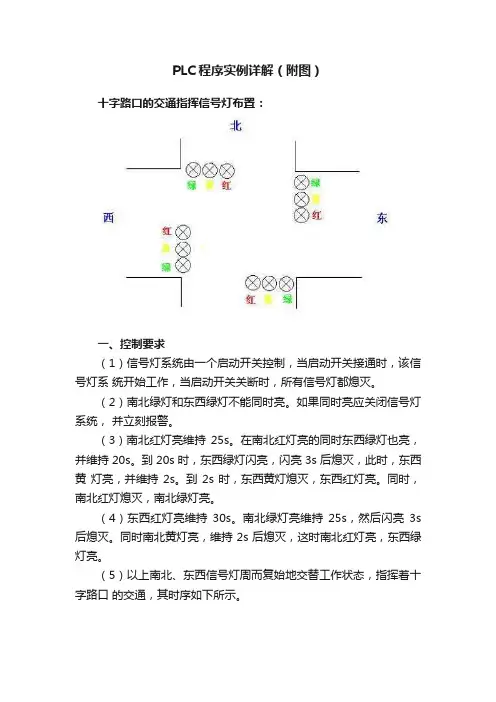
PLC程序实例详解(附图)十字路口的交通指挥信号灯布置:一、控制要求(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持 25s。
在南北红灯亮的同时东西绿灯也亮,并维持 20s。
到 20s 时,东西绿灯闪亮,闪亮 3s 后熄灭,此时,东西黄灯亮,并维持 2s。
到 2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持 30s。
南北绿灯亮维持 25s,然后闪亮 3s 后熄灭。
同时南北黄灯亮,维持2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线三、定义符号地址四、梯形图程序三层楼电梯控制电梯的上升、下降由一台电动机控制;正转时电梯上升、反转时电梯下降。
各层设一个呼叫开关(SB1、SB2、SB3)、一个呼叫指示灯(H1、H2、H3)、一个到位行程开关(ST1、ST2、ST3)。
一、控制要求:(1)各层的呼叫开关为按钮式开关,SB1、SB2 及SB3 均为瞬间接通有效(即瞬间接通的即放开仍有效)。
(2)电梯箱体上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效,简称为不可逆响应。
具体动作要求,如下表。
(3)各楼层间有效运行时间应小于10S,否则认为有故障、自动令电动机停转。
多种液体自动混合装置的PLC控制如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和SQ4 为液面传感器,液面淹没时接通,液体A、B、C与混合液阀由电磁阀YV1、YV2、YV3、 YV4控制,M为搅匀电动机,其控制要求如下:1.初始状态装置投入运行时,液体A、B、C阀门关闭,混合液阀门打开 20s 将容器放空后关闭。
2.起动操作按下启动按钮 SB1,装置开始按下列给定规律运转:①液体 A 阀门打开,液体 A 流入容器。
1、引言目前,可编程序控制器(简称PLC)由于具有功能强、可编程、智能化等特点,已成为工业控制领域中最主要的自动化装置之一,它是当前电气程控技术的主要实现手段。
用PLC控制系统取代传统的继电器控制方式,可简化接线,方便调试,提高系统可靠性。
触摸屏是专为PLC应用而设计的一种高科技人机界面产品,由于操作简便、界面美观、节省控制面板空间、性价比高和人机交互性好等优点,近年来已越来越多地被应用于工业控制等领域。
本文利用PLC和触摸屏技术研制了水位传感器测试系统,该系统主要用于进行洗衣机用水位传感器的质量检测,整个系统实现简单、稳定性好、自动化程度高,代替了以前的纯手动操作,较好地满足实际生产的要求,提高了生产效率。
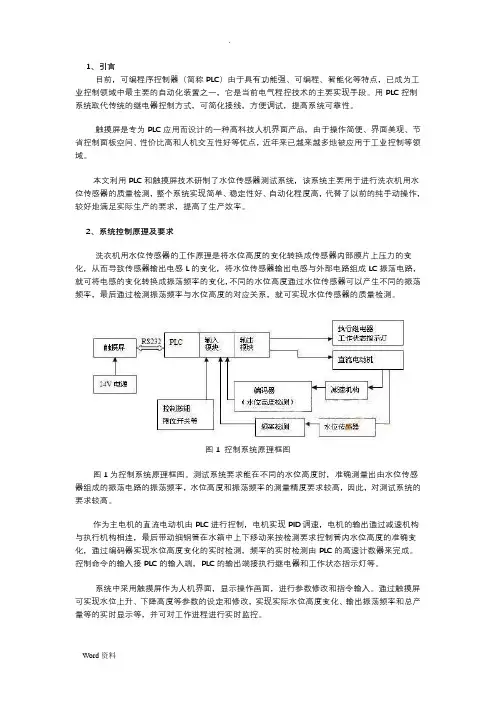
2、系统控制原理及要求洗衣机用水位传感器的工作原理是将水位高度的变化转换成传感器内部膜片上压力的变化,从而导致传感器输出电感L的变化,将水位传感器输出电感与外部电路组成LC振荡电路,就可将电感的变化转换成振荡频率的变化,不同的水位高度通过水位传感器可以产生不同的振荡频率,最后通过检测振荡频率与水位高度的对应关系,就可实现水位传感器的质量检测。
图1 控制系统原理框图图1为控制系统原理框图。
测试系统要求能在不同的水位高度时,准确测量出由水位传感器组成的振荡电路的振荡频率,水位高度和振荡频率的测量精度要求较高,因此,对测试系统的要求较高。
作为主电机的直流电动机由PLC进行控制,电机实现PID调速,电机的输出通过减速机构与执行机构相连,最后带动细钢管在水箱中上下移动来按检测要求控制管内水位高度的准确变化,通过编码器实现水位高度变化的实时检测,频率的实时检测由PLC的高速计数器来完成。
控制命令的输入接PLC的输入端,PLC的输出端接执行继电器和工作状态指示灯等。
系统中采用触摸屏作为人机界面,显示操作画面,进行参数修改和指令输入。
通过触摸屏可实现水位上升、下降高度等参数的设定和修改,实现实际水位高度变化、输出振荡频率和总产量等的实时显示等,并可对工作进程进行实时监控。
PLC程序功能流程图设计概述PLC(Programmable Logic Controller)是一种用于控制工业自动化过程的可编程逻辑控制器。
PLC程序的设计对于实现自动化控制非常重要。
在本文档中,将介绍PLC程序功能流程图的设计过程。
设计目标PLC程序功能流程图的设计旨在清晰地表示PLC所需执行的任务和逻辑关系。
通过功能流程图,可以帮助工程师更好地理解控制过程,并为编写PLC程序提供指导。
设计步骤1. 确定程序的功能和需求在设计PLC程序功能流程图之前,首先需要明确程序的功能和需求。
这包括确定需要控制的各个设备、传感器和执行器,以及所需的输入和输出信号。
2. 绘制主要的功能块图根据程序功能的需求,可以将PLC程序划分为多个功能模块。
每个功能模块代表一个特定的功能,如传感器采集、逻辑判断、执行器控制等。
绘制功能块图时,可以使用适当的符号和连线表示不同的功能和信号传输。
3. 确定各个功能模块之间的逻辑关系在功能块图中,每个功能模块代表一个子程序或函数块。
在设计PLC程序的逻辑关系时,需要确定各个功能模块之间的调用关系、数据传输方式以及条件判断等。
4. 完善流程图细节在主要的功能块图确定后,可以进一步完善流程图的细节。
可以添加条件判断、循环控制和异常处理等,以使PLC程序更加健壮和可靠。
5. 检查和验证设计在完成流程图设计后,需要对设计进行检查和验证。
可以使用软件仿真工具对流程图进行模拟运行,以验证程序的正确性和效果。
同时,也可以与实际的设备和系统进行对比,确保设计的可行性和可用性。
示例流程图graph LRA[传感器采集]-->B[逻辑判断]B-->|条件满足|C[执行器控制]B-->|条件不满足|D[报警处理]C-->E[数据记录]C-->BD-->B结论PLC程序功能流程图的设计是一个重要的工作,它可以帮助工程师更好地理解控制过程,并为编写PLC程序提供指导。
PLC程序实例详解(附图)十字路口的交通指挥信号灯布置:一、控制要求(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持25s。
在南北红灯亮的同时东西绿灯也亮,并维持 20s。
到 20s 时,东西绿灯闪亮,闪亮 3s 后熄灭,此时,东西黄灯亮,并维持 2s。
到 2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持30s。
南北绿灯亮维持25s,然后闪亮3s 后熄灭。
同时南北黄灯亮,维持 2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线三、定义符号地址四、梯形图程序三层楼电梯控制电梯的上升、下降由一台电动机控制;正转时电梯上升、反转时电梯下降。
各层设一个呼叫开关(SB1、SB2、SB3)、一个呼叫指示灯(H1、H2、H3)、一个到位行程开关(ST1、ST2、ST3)。
一、控制要求:(1)各层的呼叫开关为按钮式开关,SB1、SB2 及 SB3 均为瞬间接通有效(即瞬间接通的即放开仍有效)。
(2)电梯箱体上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效,简称为不可逆响应。
具体动作要求,如下表。
(3)各楼层间有效运行时间应小于10S,否则认为有故障、自动令电动机停转。
多种液体自动混合装置的PLC控制如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和 SQ4 为液面传感器,液面淹没时接通,液体A、B、C与混合液阀由电磁阀YV1、YV2、YV3、 YV4控制,M为搅匀电动机,其控制要求如下:1.初始状态装置投入运行时,液体A、B、C阀门关闭,混合液阀门打开 20s 将容器放空后关闭。
2.起动操作按下启动按钮 SB1,装置开始按下列给定规律运转:①液体 A 阀门打开,液体 A 流入容器。
P L C程序控制流程图范例1、引言目前,可编程序控制器(简称PLC)由于具有功能强、可编程、智能化等特点,已成为工业控制领域中最主要的自动化装置之一,它是当前电气程控技术的主要实现手段。
用PLC控制系统取代传统的继电器控制方式,可简化接线,方便调试,提高系统可靠性。
触摸屏是专为PLC应用而设计的一种高科技人机界面产品,由于操作简便、界面美观、节省控制面板空间、性价比高和人机交互性好等优点,近年来已越来越多地被应用于工业控制等领域。
本文利用PLC和触摸屏技术研制了水位传感器测试系统,该系统主要用于进行洗衣机用水位传感器的质量检测,整个系统实现简单、稳定性好、自动化程度高,代替了以前的纯手动操作,较好地满足实际生产的要求,提高了生产效率。
2、系统控制原理及要求洗衣机用水位传感器的工作原理是将水位高度的变化转换成传感器内部膜片上压力的变化,从而导致传感器输出电感L的变化,将水位传感器输出电感与外部电路组成LC振荡电路,就可将电感的变化转换成振荡频率的变化,不同的水位高度通过水位传感器可以产生不同的振荡频率,最后通过检测振荡频率与水位高度的对应关系,就可实现水位传感器的质量检测。
图1 控制系统原理框图图1为控制系统原理框图。
测试系统要求能在不同的水位高度时,准确测量出由水位传感器组成的振荡电路的振荡频率,水位高度和振荡频率的测量精度要求较高,因此,对测试系统的要求较高。
作为主电机的直流电动机由PLC进行控制,电机实现PID调速,电机的输出通过减速机构与执行机构相连,最后带动细钢管在水箱中上下移动来按检测要求控制管内水位高度的准确变化,通过编码器实现水位高度变化的实时检测,频率的实时检测由PLC的高速计数器来完成。
控制命令的输入接PLC的输入端,PLC的输出端接执行继电器和工作状态指示灯等。
系统中采用触摸屏作为人机界面,显示操作画面,进行参数修改和指令输入。
通过触摸屏可实现水位上升、下降高度等参数的设定和修改,实现实际水位高度变化、输出振荡频率和总产量等的实时显示等,并可对工作进程进行实时监控。
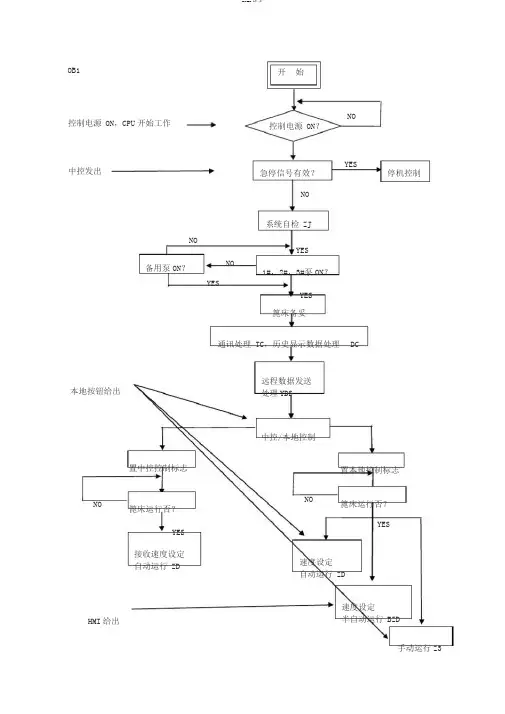
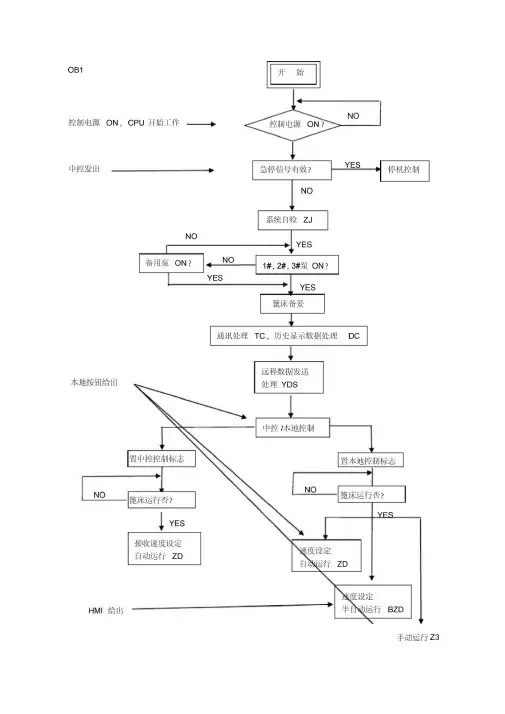
OB1控制电源 ON,CPU开始工作中控发出开始NO控制电源 ON?YES急停信号有效?停机控制NO备用泵ON?NOYESNO系统自检 ZJYES1#,2#,3#泵ON?YES篦床备妥本地按钮给出通讯处理 TC,历史显示数据处理DC远程数据发送处理YDS中控/本地控制NO 置中控控制标志篦床运行否?YESNO置本地控制标志篦床运行否?YES接收速度设定自动运行 ZD速度设定自动运行 ZD速度设定HMI给出半自动运行 BZD手动运行Z3系统自检 ZJOB1油温在20---60 度范围外,启动加热/冷却系统QTRL;油温大于30停加热,油温小于40停冷却;加热 ON时油温小于15度和冷却ON时油温大于 65度停机控制。
若为冲洗则单独控制循环泵启停。
启停加热/冷却系统QTRL油压小于18MPa?YES油缸行程超限?NO过滤器阻塞?NO油位超限?NO YES各个蝶阀打开否?YESNO小于20MPa报警大于22MPa报警停机控制YES超限小于 10mm报警超限大于10mm报警停机控制YES报警YES高,低位报警启动加热/冷却系统QTRLOB1 油温检测YES 启动加热器10s检测其状态,无状态报警;60s后启动循环泵10s检测其状态,无状油温小于 20?态报警,打开水阀NO油温大于 30?NO YES停止加热器,停止循环泵,关水阀YES油温小于 40?NO 停止冷却泵,停止循环泵,关水阀启动冷却泵10s检测其状态,无状态报警;油温大于 60?YES后启动循环泵10s检测其状态,无状60s态报警,打开水阀NO油温大于65?YES冷却泵ON?NOYES延时T1后停机控制报警油温小于15?YES加热器ON?NOYES延时T2后停机控制报警是否为冲洗状态YES启动循环泵10s检测其状态,无状态报警,定时10小时后停机NO油位超限?OB1油缸行程超限?油缸上行?开机检测默认为篦床上行YES 中位ONYES高位ON?NOYESNONO 低位OFF?YESNO报警停机控制报警YES报警油缸位移小于-78 YES油缸位移大于 78 YESNONO 位移小于-85停机控制报警位移大于85停机控制报警NONO报警报警自动运行 ZD置3列启动标志,比例阀使能有效启动过程完成否?NO1,2,3篦床启动控YES制BQD1列篦床自动运行控制2列篦床自动运行控制3列篦床自动运行控制停机控制停机标志NO?YES速度设定=0单列篦床自动运行控制NO 篦床上行?YES端点缓冲和同步补偿第一列位置与其他列位置偏差各列篦床位移YESWD,则该列设定速度增加偏差大于WD?KW*WDNO篦床速度计算NO各列篦床速度YES PID补偏差大于WV?偿篦床位移NO大于75mm?YES置下行标志端点缓冲和同步补偿各列篦床位移偏差大于 WD?NO篦床速度计算各列篦床速度偏差大于 WV?NO篦床位移NO大于-75mm?YES置上行标志第一列位置与其他列位置偏差WD,则该列设YES定速度增加KW*WDYES PID 补偿篦床启动控制 BQD篦床设定速度初值篦床初始位置校正:控制各列篦床到下端点,置上行标志1,2,3列篦床启动控制单列篦床启动控制篦床设定速度增加10%NO篦床上行?NOYES端点缓冲和同端点缓冲和步补偿DD 同步补偿DD第一列位置与其第一列位置与其他列位置偏差他列位置偏差中途各列篦床位移YES WD,则该列设中途各列篦床位移YESWD,则该列设偏差大于WD?定速度增加偏差大于WD?定速度增加KW*WDKW*WDNONO篦床速度计算篦床速度计算各列篦床速度YESPID补各列篦床速度YES PID补偏差大于WV?偿偏差大于WV?偿NONONO篦床位移NO篦床位移大于75mm?大于75mm?YESYES置下行标志置上行标志篦床速度大篦床速度计算于50%?1.每个周期计算一次YES 2. 端点计算一次3.一个循环计算一次置篦床启动结束标志端点缓冲和同步补偿DD油缸距终点小于10mm?YES速度设定=10%篦床都到达终点?YES比例阀使能复位各列篦床都到达终点?YES速度设定=10% 比例阀使能置位位移距始点大于10mm?YES速度设定恢复原值NONO NO NO半自动运行 BZD与自动运行相比不进行任何补偿,步补偿、端点缓冲,中途同步补偿, 包括:端点同 PID 补偿手动运行 SD 启停冷启停循启停加 启停1 启停2 启停3 却泵,检环泵,检 热器,检 列篦床, 列篦床, 列篦床, 测状态 测状态 测状态单列篦床手动启停控制篦床启动否? NOYES篦床设定速度比例阀使能有效行程设定上行下行设定到限位停止历史数据处理 1-温度,压力,速度,位移每个0.2s存温度,压力,速度,位移一次,存300组,不断更新,动态曲线每分钟存温度,压力,速度一次,历史数据。
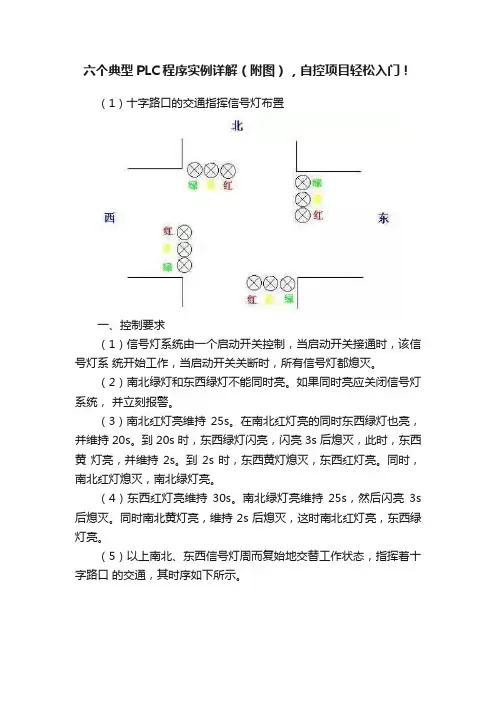
六个典型PLC程序实例详解(附图),自控项目轻松入门!(1)十字路口的交通指挥信号灯布置一、控制要求(1)信号灯系统由一个启动开关控制,当启动开关接通时,该信号灯系统开始工作,当启动开关关断时,所有信号灯都熄灭。
(2)南北绿灯和东西绿灯不能同时亮。
如果同时亮应关闭信号灯系统,并立刻报警。
(3)南北红灯亮维持25s。
在南北红灯亮的同时东西绿灯也亮,并维持 20s。
到 20s 时,东西绿灯闪亮,闪亮 3s 后熄灭,此时,东西黄灯亮,并维持 2s。
到 2s 时,东西黄灯熄灭,东西红灯亮。
同时,南北红灯熄灭,南北绿灯亮。
(4)东西红灯亮维持30s。
南北绿灯亮维持25s,然后闪亮3s 后熄灭。
同时南北黄灯亮,维持 2s 后熄灭,这时南北红灯亮,东西绿灯亮。
(5)以上南北、东西信号灯周而复始地交替工作状态,指挥着十字路口的交通,其时序如下所示。
二、PLC 接线三、定义符号地址四、梯形图程序(2)电梯控制电梯的上升、下降由一台电动机控制;正转时电梯上升、反转时电梯下降。
各层设一个呼叫开关(SB1、SB2、SB3)、一个呼叫指示灯(H1、H2、H3)、一个到位行程开关(ST1、ST2、ST3)。
一、控制要求:1、各层的呼叫开关为按钮式开关,SB1、SB2 及 SB3 均为瞬间接通有效(即瞬间接通的即放开仍有效)。
2、电梯箱体上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效,简称为不可逆响应。
具体动作要求,如下表。
3、各楼层间有效运行时间应小于10S,否则认为有故障、自动令电动机停转。
(3)多种液体自动混合装置的 PLC 控制如图所示为三种液体混合装置,SQ1、SQ2、SQ3 和 SQ4 为液面传感器,液面淹没时接通,液体 A、B、C 与混合液阀由电磁阀 YV1、YV2、YV3、 YV4 控制,M 为搅匀电动机,其控制要求如下:1.初始状态装置投入运行时,液体A、B、C 阀门关闭,混合液阀门打开20s 将容器放空后关闭。
手动运行Z3
系统自检ZJ
OB1
YES 启动加热/冷却系统QTRL
OB1
油位超限?
OB1
油缸行程超限? 自动运行ZD
停机控制
速度设定=0
单列篦床自动运行控制
篦床启动控制BQD
单列篦床启动控制
篦床设
定速度
增加
10%
NO
YES
置下行标志
篦床速度大
于50% ?
YES
篦床速度计算
1. 每个周期计算一次
2. 端点计算一次
3. 一个循环计算一次
置篦床启动
结束标志
端点缓冲和同步补偿DD
半自动运行BZD
手动运行SD 与自动运行相比不进行任何补偿,包括:端点同步补偿、端点缓冲,中途同步补偿,PID补偿
单列篦床手动启停控制
历史数据处理1-温度,压力,速度,位移。
1工业污水处理系统的工作原理1.1控制系统总体框图PLC为核心控制器,通过检测操作面板按钮的输入、各类传感器的输入,以及相关模拟量的输入,完成相关设备的运行、停止和调速控制。
3-2电气控制系统框图1.2工作过程控制过程可以分为单设备手动控制功能和自动运行功能。
在手动控制模式下,单设备可以单独运行,不影响其他设备运行。
如图4-1所示。
图4-1模式选择流程图1.3手动模式在就地箱手动模式下,可单独调试每个设备的运行,如图4-2所示。
在此模式下,可以通过按钮对加氯系统、电动阀门、曝气机、刮泥机,以及各类泵进行控制。
图4-2手动操作模式流程图1.4自动模式处于自动方式时,系统上电后,按下自动启动确认后系统运行,系统开始工作,其工作过程包括以下几个方面。
PLC检测到传感器状态进行启动如图4-3所示。
图4-3 自动操作模式流程图2自动控制流程在自动控制模式流程图中,调用了各个控制系统的程序,主要包括提升泵、潜水泵程序、加药系统程序、曝气沉砂系统程序、污泥回流泵系统程序。
以及污泥脱水系统程序,以下将分别介绍各个子程序的工作过程。
1提升泵控制流程图2潜水泵程序主要控制潜水泵的运行和停止,其工作过程包括以下几个方面:(1)自动过程开始启动潜水泵。
(2)检测液面高度,低于最低位传感器时,开始定时防止误判。
(3)定时到后,若仍低于最低位传感器,则停止潜水泵运行,否则潜水泵继续运行。
(4)检测液面处于中位和高位传感器之间时,开始定时防止误判。
(5)定时到后,若液面仍持续处于高位传感器,则输出报警信号。
潜水泵工作流程图如图4-5所示。
图4-5潜水泵工作流程图3曝气沉砂系统工作流程图如图4-7所示。
4-7曝气沉砂系统工作流程图4污泥回流系统程序主要控制污泥回流泵的运行和停止,其工作过程包括以下几个方面。
(1)自动过程开始首先检测液面高低,若低于最低位传感器,启动定时。
(2)定时到,若液面仍低于最低位传感器则停止回流泵运行。
PLC控制实例实例导读●五星彩灯闪烁控制程序设计。
●交通信号灯控制。
●四层电梯PLC控制系统。
●自动送料装车控制实训1 五星彩灯控制实训内容1. 五星彩灯分布图(如图1. 1所示)图1.1 五星彩灯分布图2. 控制要求:十只发光二极管L1-L10 的亮暗规律如下:1 ) 花样1先使全部彩灯复位(熄灭),然后L1 到L10 按图1.2所示的顺序每隔0.5s点亮一个彩灯,直到所有彩灯全部亮起为一个循环,重复轮回三次。
图1.2 花样1流程图2)花样2两组灯亮灭交替,循环闪烁三次。
图1.3 花样2流程图3 ) 花 样 3先 L1 灯亮,延时0.5s 后 L2 灯亮L1 灯灭,延时0.5s 后 L3 灯亮L2 灯灭,依次类推,形成单灯跑马 效果,反复循环三次。
(L10L2 L9L3 L8L4 L7L5 L6图1.4花样3流程图根据以上控制要求,将三种花样连贯起来,完成PLC VO 地址分配、硬件连线和控制程序 的设计。
根据五星彩灯的控制要求,为使程序简单,本实例不使用输入信号, 一通电,彩灯即开始 进行花样循环;使用10个输出点接 L1~L10 十个彩灯,具体 VO 地址分配如表1 所示。
表 1 / O 地址分配表输入元件I/O 地址输出元件 I/O 地址①卫 ③ 四 5 → 6 7④(四L101.主程序梯形图Network 4三个计数器清零SM0.1 C0R3Network 2SM0.0调用花样1子程序3次C0<1 +3SBR O_ENNetwork 3 调用花样2子程序3次SM0.0 C1 C0< ==1+4 +3Network 4 调用花样3子程序3欲SM0.0 C2 C11+4 +424VOC 电源L ⁶1 17 L 81 19 L 10[十>1M 1L+ 0.0 0.10.2 0.3 0. 4 2M 2L + 05 0. 6 0.7 M L+ DCS7-200 CPU224 DC/DC/DC>1M 0.00.10.203040.50.60.72M 1.01.11213141.5 L+L11 L2 L3[ L4| L5|DC24V+PLC 接线图SBR 1_ ENSBR 2 ENNetwork 5C2 ==1 +4 彩灯熄灭Q0.0R10图1.6 彩灯PLC 梯形图控制程序(主程序)2.花样1子程序梯形图图1.7 彩灯PLC 梯形图控制程序(花样1子程序) 3. 花样2子程序Network 1SM0.1让所有彩灯熄灭MOV W EN ENO MOV WENO15#0000=IN OUT □V/0 15#0000-OUT -LWONetwork Z 网络2到网络3为脉冲振荡电路SM0.0 T40 M0.1T39N TON+5{ PTNetwork 3T39 T40 M0.2M0.2T40TONNetwork 4M0.1Network 5M0.2+5{PT网络4到网络5为五星彩灯内圈外圈闪烁电路Q0.5S500.0R )5Q0.55Q0.0SEN5 Network 6Q0.0闪烁次数计数器CU C1CTU]10.4+5+Network 7 子程序运回C1==1 P K—(RET)+4图1.8彩灯PLC 梯形图控制程序(花样2子程序)4.花样3子程序Hctwork1SMM0.1Metwork2C2==1+1 Metwork 3C2+2 Hctwork4SM0.0Network 5,W¹.°Metwork 6T37M11.5(第一次循坏前)辅助继电器复位M¹0.1R )14(第二次循环前)辅助些电器复位M10.1P —(R )14(第三次循环前)辅助继电器复位M10.1P —(R)14同路4到网络9为脉冲生成电路T37 M1.0()T37TOM+2{M10.0)M¹0.1Network12M10.2Network13M10.3Network14M10.4Network15M10.5Network16M10.5Network17M10.7Network18M11.0Network 19M11.1同路11到网路20,形灯单灯跑马效果Q0.0)Q0.1)00.200.3—()Q0.4()Q0.5)Q0.600.7Q10Network 7SI/0.0Network20M11.2M0.1Q1.1)Metwork BM.1Network 9T38 MM⁰0M0.0丽+2世M2.—()循环达数计数器C2CUCTU1.5RNotwork 10MM0.0奇存器移位ENO+4{FVNetwork 23 子程序近回M11.5M1001|DATA ——(RET)M10.1 S BIT+14{图1.8 彩灯PLC 梯形图控制程序(花样3子程序)Network 21Network 22T0H]T38实训2交通信号灯控制1. 交通灯示意图(如图2. 1所示)北西实训内容2东南图2.1 交通灯示意图2.控制要求:SB1位自锁型按钮,功能为手动/自动切换,按下为自动状态,自动状态时SB2,SB3 不起作用。
作业
一、机械手运动控制
图6-6所示的机械手工作过程图。
机械手将工件从A点向B点移送。
机械手的上升、下降与左移、右移都是由双线圈两位电磁阀驱动气缸来实现的。
抓手对物件的松开、夹紧是由一个单线圈两位电磁阀驱动气缸完成,只有在电磁阀通电时抓手才能夹紧。
该机械手工作原点在左上方,按下降、夹紧、上升、右移、下降、松开、上升、左移的顺序依次运行。
2、画出功能图
二、十字交通灯控制要求
(1)接通起动按钮后,信号灯开始工作,东西方向红灯、南北绿灯同时亮。
(2)南北绿灯亮25s后,闪烁3s,接着南北黄灯亮,2s后南北红灯亮,30s后南北向绿灯又亮……如此不断循环,直至停止工作。
(3)东西方向红灯亮30s后,东西向绿灯亮,25s后东西向绿灯闪烁3s,接着东西向黄灯亮,2s后东西方红灯又亮……如此不断循环,直至停止工作。
2、画出功能图。
OB1 开始NO 控制电源ON,CPU 开始工作控制电源ON?中控发出NO备用泵ON?NOYES 急停信号有效?NO系统自检ZJYES1#,2#,3#泵ON?YES篦床备妥YES停机控制本地按钮给出NO HMI 给出置中控控制标志篦床运行否?YES接收速度设定自动运行ZD通讯处理TC,历史显示数据处理DC远程数据发送处理YDS中控/本地控制NO置本地控制标志篦床运行否?YES速度设定自动运行ZD速度设定半自动运行BZD手动运行Z3系统自检ZJOB1油温在20---60 度范围外,启动加热/冷却系统QTRL;油温大于30 停加热,油温小于40 停冷却;加热ON 时油温小于15 度和冷却ON 时油温大于65 度停机控制。
若为冲洗则单独控制循环泵启停。
油压小于18 MPa?YES油缸行程超限?NO过滤器阻塞?NO油位超限?NO YES各个蝶阀打开否?YESNOYESYESYES启停加热/冷却系统QTRL小于20 MPa 报警大于22 MPa 报警停机控制超限小于10 mm 报警超限大于10 mm 报警停机控制报警高,低位报警启动加热/冷却系统 QTRLOB1油温检测启动加热器 10s 检测其状态,无状态报警; 60s 后启动循环泵 10s 检测其状态,无状 态报警,打开水阀NOYES油温大于 30?住手加热器,住手循环泵,关水阀NO油温小于 40?住手冷却泵,住手循环泵,关水阀启动冷却泵 10s 检测其状态,无状态报警;YES60s 后启动循环泵 10s 检测其状态,无状 态报警,打开水阀NO油温大于 65?NO延时 T1 后停机控制报警YES油温小于 15?NOYES延时 T2 后停机控制报警YES启动循环泵 10s 检测其状态,无 状态报警,定时 10 小时 后停机NO冷却泵 ON?YES是否为冲洗状态油温大于 60?油温小于 20?加热器 ON?YESYESYESNO油位超限?OB1中位ONYES 高位ON?NYOENOYES报警低位OFF?NO报警报警停机控制油缸行程超限?油缸上行?开机检测默认为篦床上行YES 油缸位移大于78NO YESNO位移大于85 停机控制报警NO报警油缸位移小于-78NO位移小于-85 停机控制报警NO报警自动运行ZD置3 列启动标志,比例阀使能有效启动过程完成否?YES NO1,2,3 篦床启动控制BQD1 列篦床自动运行控制2 列篦床自动运行控制3 列篦床自动运行控制停机控制停机标志NOYES速度设定=0单列篦床自动运行控制篦床启动控制 BQDNO篦床上行? YES端 点缓冲和 同步补偿各列篦床位移 偏差大于 WD ? KW*WDNO篦床速度计算NO各列篦床速度 偏差大于 WV ?NO篦床位移 大于-75mm ? YES置上行标志第一列位置与其 他 列 位 置 偏 差 WD ,则该列设 定 速 度 增 加 KW*WD各列篦床位移 偏差大于 WD ? NO篦床速度计算第一列位置与其他 列 位 置WD ,则该列设 定 速 度 篦床位移大于 75m m ? YES置下行标志各列篦床速度 偏差大于 WV ?端 点缓冲和 同步补偿偏 差增 加PID 补 偿PID 补 偿YESYESYESYESNONO篦床设定速度初值篦床初始位置校正:控制各列篦床到下端点,置上行标志1 ,2,3 列篦床启动控制单列篦床启动控制篦床设定速度增加10%NO篦床上行?YES端点缓冲和同步补偿DD中途各列篦床位移YES偏差大于WD?NO篦床速度计算各列篦床速度偏差大于WV?NO篦床位移大于75mm?YES置下行标志篦床速度大于50%?YES置篦床启动结束标志第一列位置与其他列位置偏差WD,则该列设定速度增加KW*WDPID 补偿NO端点缓冲和同步补偿DD中途各列篦床位移YES偏差大于WD?NO篦床速度计算各列篦床速度偏差大于WV?NO篦床位移大于75mm?YES置上行标志篦床速度计算1. 每一个周期计算一次2. 端点计算一次3. 一个循环计算一次第一列位置与其他列位置偏差WD,则该列设定速度增加KW*WDPID 补偿YESYESNONO端点缓冲和同步补偿DD半自动运行 BZDYES 速度设定=10%篦床都到达终点?YES比例阀使能复位各列篦床都到达 终点? YES速度设定=10%比例阀使能置位位移距始点大 于 10mm ? YES速度设定恢复原值油缸距终点 小 NO 于 10mm ? NONO NO手动运行 SD单列篦床手动启停控制N O篦床启动否?YES篦 床 设 定 速 度比例阀使能有效行程设定上行下行设定到限位住手启 停 冷 启 停 循启 停 加 启 停 1 启 停 2 启 停 3 却泵, 检 环泵, 检热器, 检 列篦床, 列篦床, 列篦床,测状态 测状态 测状态与自动运行相比不进行任何补偿, 包括:端点同步补偿、端点缓冲,中途同步补偿, PID 补偿历史数据处理1-温度,压力,速度,位移每一个0.2s 存温度,压力,速度,位移一次,存300 组,不断更新,动态曲线每分钟存温度,压力,速度一次,历史数据。
1、引言
目前,可编程序控制器(简称PLC)由于具有功能强、可编程、智能化等特点,已成为工业控制领域中最主要得自动化装置之一,它就是当前电气程控技术得主要实现手段。
用PLC控制系统取代传统得继电器控制方式,可简化接线,方便调试,提高系统可靠性。
触摸屏就是专为PLC应用而设计得一种高科技人机界面产品,由于操作简便、界面美观、节省控制面板空间、性价比高与人机交互性好等优点,近年来已越来越多地被应用于工业控制等领域。
本文利用PLC与触摸屏技术研制了水位传感器测试系统,该系统主要用于进行洗衣机用水位传感器得质量检测,整个系统实现简单、稳定性好、自动化程度高,代替了以前得纯手动操作,较好地满足实际生产得要求,提高了生产效率。
2、系统控制原理及要求
洗衣机用水位传感器得工作原理就是将水位高度得变化转换成传感器内部膜片上压力得变化,从而导致传感器输出电感L得变化,将水位传感器输出电感与外部电路组成LC振荡电路,就可将电感得变化转换成振荡频率得变化,不同得水位高度通过水位传感器可以产生不同得振荡频率,最后通过检测振荡频率与水位高度得对应关系,就可实现水位传感器得质量检测。
ﻫ图1 控
制系统原理框图
图1为控制系统原理框图。
测试系统要求能在不同得水位高度时,准确测量出由水位传感器组成得振荡电路得振荡频率,水位高度与振荡频率得测量精度要求较高,因此,对测试系统得要求较高。
作为主电机得直流电动机由PLC进行控制,电机实现PID调速,电机得输出通过减速机构与执行机构相连,最后带动细钢管在水箱中上下移动来按检测要求控制管内水位高度得准确变化,通过编码器实现水位高度变化得实时检测,频率得实时检测由PLC得高速计数器来完成。
控制命令得输入接PLC得输入端,PLC得输出端接执行继电器与工作状态指示灯等。
系统中采用触摸屏作为人机界面,显示操作画面,进行参数修改与指令输入。
通过触摸屏可实现水位上升、下降高度等参数得设定与修改,实现实际水位高度变化、输出振荡频率与总产量等得实时显示等,并可对工作进程进行实时监控。
3、控制系统硬件组成
根据水位传感器测试系统得工艺特点与控制要求,本系统选用三菱公司得FX1N-24MR
基本型PLC,共有24点输入输出,其中14个输入点,10个继电器输出点,其环境温度、抗冲击、抗噪声等性能指标均能满足要求。
图2为PLC控制系统硬件接线图。
输入X0~X1为编码器得A、B相输出脉冲信号,X3为振荡频率信号,X4~X14为按钮、选择开关、限位开关与计数开始等信号,输出Y0~Y7分别控制继电器、信号指示灯等。
图2 控制系统硬件接线图
水位高度得测量主要就是通过编码器来完成,编码器得A、B相可向可编程序控制器得高速计数端发出脉冲,并通过高速计数器C251获得该脉冲得计数值。
当电动机转动时,高速计数器得计数值就会不断累加。
通过传动机构得合理设置,每个脉冲对应0、25mm得水位高度变化,通过编程计算,可以算出实际水位高度得变化。
振荡信号频率得测量可利用PLC得高速计数器C253完成,通过编程,可以利用高速计数器C253在规定得时间内(如3s)对振荡信号得脉冲数进行计数,并将计数值取出并放在数据存储器D0中,那么将D0中得值除以3所得得值就就是所要测量得振荡频率得大小。
触摸屏选用台湾生产得性价比较高得PWS6600S,配备有5、7英寸高清晰度液晶显示屏,分辨率为320×240,通过一个RS232串口与PLC实现串行通讯。
支持静态文字控件,支持on/off按钮、数值输入、画面按钮、数值显示、状态指示灯控件等动态对象,支持中文显示。
当在静态文字控件中指定变量时,触摸屏能够在屏幕上实时显示与之相连得PLC中得变量值,这给工作人员实现系统监控与状态检测提供了较大得方便。
当操作人员触摸数值输入控件时,PWS6600S自动弹出虚拟数字键盘,包括0~9等数字与清空、取消、删除与确定等。
输入数字后按取消键取消可输入值,按确定键确定输入,虚拟数字键盘消失后,控件中得数字也就成为输入值,相应得PLC中对应变量也随之改变。
当操作人员触摸on/off按钮、画面按钮、状态指示灯与数值显示等控件时,PWS6600S可以触发按钮按下、按钮弹起、画面切换、状态显示与数值显示等事件,操作人员可以进行清除数据、改变工作模式、选择屏幕画面等工作。
ﻫ4、系统软件设计
系统软件包括PLC控制软件与触摸屏软件两部分。
PLC具有丰富得编程指令,软件设计环境良好,可采用梯形图(LD)、顺序功能图(SFC)与指令表(IL)等基本得编程语言。
本系统采用梯形图编程,编程软件为FXGP,先利用计算机(PC)进行编程与调试,调试成功后通过接口电缆将控制程序下载到PLC中。
PLC程序主要包括主程序与分段上升、分段下降子程序等,其中分段上升、分段下降子程序主要就是使细钢管按测试要求分七段进行上升与下降,以便测试不同水位高度时传感器输出得频率大小,从而判断水位传感器得质量好坏。
图3为PLC程序控制流程图。
ﻫ图3 PLC程
序控制流程图
PWS6600S触摸屏画面由专用支持软件ADP6、0进行设计组态,先在个人计算机上用该软件设计窗口、菜单、按钮等界面,设计完成后通过RS232串行口将程序下载至PWS6600S触摸屏内存中,由PLC对触摸屏状态控制区与通知区进行读写达到两者之间得信息交互。
PLC读触摸屏状态通知区中得数据,得到当前画面号,而通过写触摸屏状态控制区得数据,强制切换画面。
触摸屏加电后就进入设计画面,通过触摸屏按钮可显示与修改PLC数据存储器得数据,实现与PLC得通讯。
整个画面由两部分组成:一部分为显示画面,主要包括系统画面、测试系统得运行状态、水位高度显示、振荡频率输出、显示每天得总产量等画面,如图4所示;另一部分为参数设定画面,主要用来设定工作模式、水位分段上升、下降得数值等,如图5所示。
ﻫ由于PWS6600S触摸屏具有较强得人机交互功能,以及简便得操作特性,简洁得界面与高可靠性,因此得到了较好得使用效果。
5、结束语
将PLC与触摸屏技术应用于水位传感器检测系统,使操作更加简便,速度、水位高度可按测试要求进行控制,极大地提高了系统得可靠性与工作效率,控制精度高,操作性强,并可通过触摸屏观察PLC内部得工作情况与现场工况,核定相关参数,操作灵活、方便。
本系统成功开发以来,已先后在多家为洗衣机生产厂家配套得水位传感器生产厂家投入使用,系统稳定可靠,经济效益十分明显,同时,因其操作简单、实用性强,数据可实时监控等特点,受到用户得普遍好评。