任务1 工业机器人手动操作基础知识
- 格式:ppt
- 大小:6.58 MB
- 文档页数:54
工业机器人操作与编程(ABB)教学大纲一、说明1.课程的性质和内容《工业机器人操作与编程(ABB)》课程是技师学院工业机器人应用与维护专业的专业课。
主要内容包括:ABB机器人基础知识及手动操作、ABB机器人的IO 配置、ABB机器人程序数据、ABB机器人程序的编写、ABB机器人的总线通信、ABB机器人TCP练习、ABB机器人搬运垛、ABB机器人智能分拣。
2.课程的任务和要求本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。
(1)通过本课程的学习,学生应该达到以下几个方面的专业基础。
(2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。
(3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。
(4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。
(5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。
(6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。
(7)熟悉ABB机器人的硬件连接。
3.教学中应该注意的问题(1)本课程的教学以ABB机器人的应用。
维护为主,注意培养学生对机器人编程和维护的能力。
(2)在本课程的教学中应该注意培养学生的逻辑思维能力。
(3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。
二、学时分配表三、课程内容及要求项目一 ABB机器人基础知识及手动操作教学要求1.了解工业机器人的发展及机器人安全注意事项。
2.掌握ABB机器人示教器的使用3.掌握示教器上基本的功能操作。
教学内容任务一工业机器人的概述和安全注意事项任务二认识示教器——配置必要的操作环境任务三ABB机器人事件信息查询及数据备份与恢复任务四ABB机器人的手动操纵任务五ABB机器人的转数计数器更新操作教学建议本项目的主要教学目标是激发学生对工业机器人学习的兴趣。
工业机器人操作指南工业机器人作为现代工业生产中的重要设备,已经被广泛应用于各个行业。
为了正确高效地操作工业机器人,本文将从机器人的基本操作流程、安全注意事项和故障排除等方面进行详细介绍。
一、基本操作流程1. 准备工作在使用工业机器人前,需要确认机器人周围的安全环境是否符合要求,检查机器人及其周边设备是否正常运行。
同时,需要保证操作者具备相关的机器人操作培训和技能。
2. 启动机器人按照机器人的启动步骤,将机器人的电源连接并打开,然后按照控制界面或操作面板上的指示进行启动操作。
在启动过程中,需要仔细观察机器人是否有异常声音或震动,确保机器人能够正常运行。
3. 选择操作模式根据实际需求,选择适当的机器人操作模式。
常见的操作模式包括手动操作模式、自动操作模式和示教操作模式。
手动操作模式适用于维护和调试工作,自动操作模式适用于大批量生产,示教操作模式适用于新任务的录制和编程。
4. 进行操作任务根据需要,选择合适的操作任务,包括但不限于抓取、放置、装配和焊接等任务。
在进行操作任务时,需要保证机器人的姿态和速度等参数设置正确,并严格按照安全规程进行操作。
5. 完成任务并停止机器人当完成操作任务后,需要停止机器人的运行。
按照相应步骤,将机器人的电源关闭,并确保机器人及其周边环境的安全。
二、安全注意事项1. 个人安全操作者在操作机器人时,应穿戴符合要求的个人防护装备,如安全帽、防护服、安全鞋等,避免发生意外伤害。
2. 机器人周边安全在机器人操作过程中,需要确保机器人周边的区域干净整洁,避免杂物堆积或放置在机器人操作范围内。
同时,需要设置相应的安全防护设施,如护栏、警示标志等,确保工作区域的安全。
3. 紧急停机在出现紧急情况时,操作者需要立即执行紧急停机动作,切断机器人的电源,并进行相应的处理措施。
操作者需要熟悉紧急停机程序,并在必要时进行紧急演练。
4. 操作规程操作者在操作机器人时,需要按照相应的操作规程进行操作。

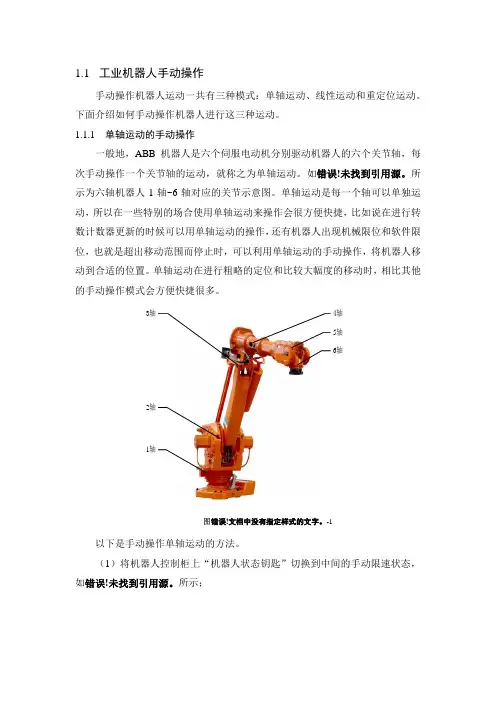
1.工业机器人的运动2. 工业机器人的6个自由度的介绍3.示教器(1)示教器介绍(2)手动操纵界面A:手动操纵设置窗口B:机器人位置显示窗口C:摇杆方向提示窗口(3)基本操作——点动点动机器人就是点按\微动【轴操作键】来移动机器人手臂的方式。
每点按或微动【轴操作键】一次机器人移动一段距离。
点动机器人主要用在示教时离目标位置较近的场合或初期操作中用户。
(3)基本操作——连续移动连续移动机器人则是长按/拨动【轴操作键】来移动机器人手臂的方式。
连续移动机器人主要用在示教时离目标位置较远的场合。
(3)基本操作——运动方式ABB机器人具有线性运动、重定位运动和关节(单轴)运动3种运动方式。
(1)关节(单轴)运动通过摇杆控制机器人单轴运动。
(2)线性运动大多数情况下,选择从点移动到点时,机器人的运行轨迹为直线,所以称为直线运动,也称为线性运动。
其特点是焊枪(或工件)姿态保持不变,只是位置改变。
(3)重定位运动重定位运动方式是工件姿态改变,而位置保持不变。
典型运动的适应场合分析1.关节(单轴)运动关节运动经常用在机器人双工位操作,主要实现点位运动。
其关键操作步骤是:系统上电开机→A工位机器人手动示教→选择关节运动(点到点运动模式)→移动机器人到B工位/旋转回转机→B工位机器人手动示教。
2.线性运动线性运动常在实际作业示教或手动操作实现直线轨迹运动时常用。
例:机器人作业运动轨迹示教完毕后,为防止末端工具与工件、夹具等发生碰撞,通常需要将末端工具保持作业姿态而离开作业结束点,类似这种不改变工具姿态的操作均可选择在工具坐标系线性运动下操作。
关键操作步骤:系统上电开机→选择关节运动→变换末端工具姿态至作业姿态→选择线性运动→移动机器人至直线轨迹的开始点→选择直角坐标系的Y轴→移动机器人至直线轨迹的结束点。
3.重定位运动机器人作业运动轨迹示教时,为防止末端工具与工件、夹具等发生碰撞,通常需要改变末端工具的作业姿态,类似这种改变工具姿态的操作均可选择在工具坐标系重定位运动下操作。