现代控制理论最小二乘法辨识
- 格式:ppt
- 大小:265.50 KB
- 文档页数:3
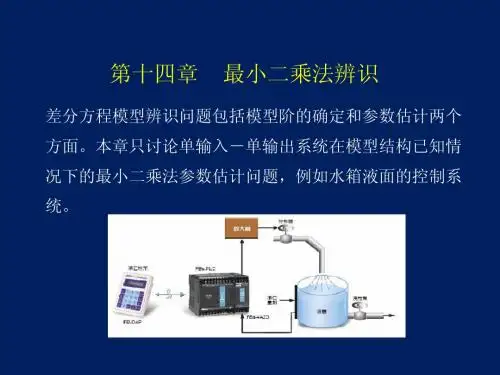
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
目录一、系统辨识的定义.................................................................................................................. - 2 -二、最小二乘法的引出.............................................................................................................. - 2 -三、最小二乘法的原理.............................................................................................................. - 3 -3.1 最小二乘法一次完成推导[1]........................................................................................ - 3 -3.2最小二乘法的缺陷[ 5].................................................................................................... - 5 -四、其他系统辨识方法.............................................................................................................. - 5 -4.1 基于BP神经网络的系统辨识方法特点[3]................................................................. - 5 -4.2 基于遗传算法的系统辨识算法................................................................................... - 6 -五、结论...................................................................................................................................... - 7 -六、参考文献.............................................................................................................................. - 7 -系统辨识方法简介摘要:在研究一个控制系统过程中,建立系统的模型十分必要。
现代控制理论学习指导书第一部分重点要点线性系统理论线性系统数学模型稳定性、可控性和可观测性单变量极点配置的条件和方法。
最优控制理论变分法极小值原理最优性原理动态规划最优估计理论参数估计方法掌握最小方差估计和线性最小方差估计方法状态估计方法预测法,滤波系统辨识理论经典辨识方法最小二乘辨识方法系统模型确定方法自适应控制理论用脉冲响应求传递函数的原理和方法。
两种设计方法智能控制理论掌握智能控制的基本概念、基本方法以及智能控制的特点。
了解分级递阶智能控制、专家控制、神经网络控制、模糊控制、学习控制和遗传算法控制的基本概念第二部分练习题填空题1.自然界存在两类系统:______静态系统____和______动态系统____。
2.系统的数学描述可分为___外部描述_______和___内部描述_______两种类型。
3.线性定常连续系统在输入为零时,由初始状态引起的运动称为___自由运动_______。
5.互为对偶系统的__特征方程________和___特征值_______相同。
6.任何状态不完全能控的线性定常连续系统,总可以分解成____完全能控______子系统和____完全不能控______ 子系统两部分。
7.任何状态不完全能观的线性定常连续系统,总可以分解成__完全能观测________子系统和____完全不能观测______子系统两部分。
8.对状态不完全能控又不完全能观的线性定常连续系统,总可以将系统分解___能控又能观测、能控但不能观测、不能控但能观测、不能控又不能观测四个子系统。
9.对SISO系统,状态完全能控能观的充要条件是系统的传递函数没有__零极点对消_。
10.李氏稳定性理论讨论的是动态系统各平衡态附近的局部稳定性问题。
11.经典控制理论讨论的是__在有界输入下,是否产生有界输出的输入输出稳定性问题,李氏方法讨论的是_动态系统各平衡态附近的局部稳定性问题。
12. ___状态反馈_______和__输出反馈________是控制系统设计中两种主要的反馈策略。
---------------------------------------------------------------最新资料推荐------------------------------------------------------系统辨识—最小二乘法最小二乘法参数辨识 1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类={M}(即给定一类已知结构的模型),一类输入信号 u 和等价准则 J=L(y,yM)(一般情况下,J 是误差函数,是过程输出 y 和模型输出 yM 的一个泛函);然后选择使误差函数J 达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使1 / 17用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
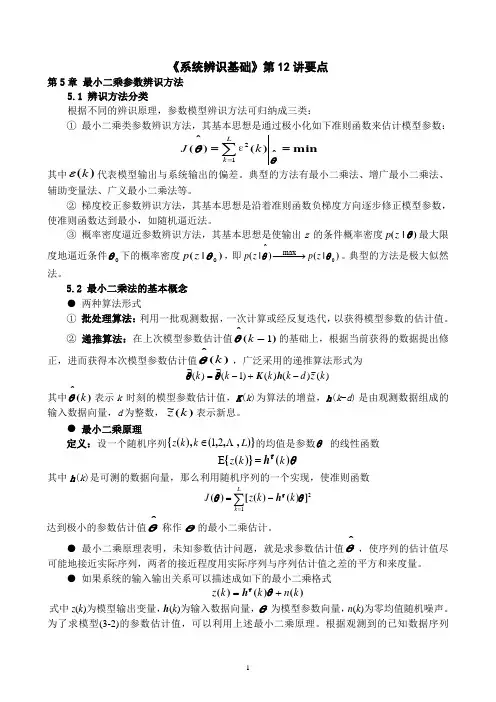
《系统辨识基础》第12讲要点第5章 最小二乘参数辨识方法5.1 辨识方法分类根据不同的辨识原理,参数模型辨识方法可归纳成三类:① 最小二乘类参数辨识方法,其基本思想是通过极小化如下准则函数来估计模型参数:min )()ˆ(ˆ==∑=θθLk k J 12ε其中)(k ε代表模型输出与系统输出的偏差。
典型的方法有最小二乘法、增广最小二乘法、辅助变量法、广义最小二乘法等。
② 梯度校正参数辨识方法,其基本思想是沿着准则函数负梯度方向逐步修正模型参数,使准则函数达到最小,如随机逼近法。
③ 概率密度逼近参数辨识方法,其基本思想是使输出z 的条件概率密度)|(θz p 最大限度地逼近条件0θ下的概率密度)|(0θz p ,即)|()ˆ|(0m a xθθz p z p −−→−。
典型的方法是极大似然法。
5.2 最小二乘法的基本概念● 两种算法形式① 批处理算法:利用一批观测数据,一次计算或经反复迭代,以获得模型参数的估计值。
② 递推算法:在上次模型参数估计值)(ˆ1-k θ的基础上,根据当前获得的数据提出修正,进而获得本次模型参数估计值)(ˆk θ,广泛采用的递推算法形式为() ()()()~()θθk k k k d z k =-+-1K h其中)(ˆk θ表示k 时刻的模型参数估计值,K (k )为算法的增益,h (k -d ) 是由观测数据组成的输入数据向量,d 为整数,)(~k z 表示新息。
● 最小二乘原理定义:设一个随机序列)},,,(),({L k k z 21∈的均值是参数θ 的线性函数θτ)()}({k k z h =E其中h (k )是可测的数据向量,那么利用随机序列的一个实现,使准则函数21])()([)(θθτ∑=-=Lk k k z J h达到极小的参数估计值θˆ称作θ的最小二乘估计。
● 最小二乘原理表明,未知参数估计问题,就是求参数估计值θˆ,使序列的估计值尽可能地接近实际序列,两者的接近程度用实际序列与序列估计值之差的平方和来度量。
最小二乘法参数辨识201403027摘要:系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小二乘法是一种应用极其广泛的系统辨识方法.阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析说明了最小二乘法应用于系统辨识中的重要意义.关键词:最小二乘法;系统辨识;动态系统Abstract: System identification in engineering is widely used, system identification methods there are many ways, least squares method is a very wide range of application of system identification method and the least squares method elaborated establish a dynamic system models in System Identification applications and examples analyzed by the least squares method is applied to illustrate the importance of system identification.Keywords: Least Squares; system identification; dynamic system引言随着科学技术的不断发展,人们认识自然、利用自然的能力越来越强,对于未知对象的探索也越来越深入.我们所研究的对象,可以依据对其了解的程度分为三种类型:白箱、灰箱和黑箱.如果我们对于研究对象的内部结构、内部机制了解很深入的话,这样的研究对象通常称之为“白箱”;而有的研究对象,我们对于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”.研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律.对于动态系统辨识的方法有很多,但其中应用最广泛,辨识效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义.1.1 系统辨识简介系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
最小二乘辨识方法的优劣比较摘 要:本文系统的探讨了三种最小二乘类辨识方法的原理和性能,并对各种方法在各种不同的环境下进行了MATLAB 仿真,仿真结果证明:最小二乘法不适合实时处理,在同等情况下,递推最小二乘的辨识速度较快,但在有色噪声干扰下效果不理想,广义最小二乘法的辨识效果最好,且不受噪声是否有色的影响,但是费时最多。
关键词:最小二乘 辨识速度 MATLAB 仿真1 引言系统辨识是一门介于现代控制理论和系统理论的边缘学科.它将现代控制论的平滑、滤波、预测和参数估计理论,以及系统论的系统分析方法和建模思想应用于自然科学、社会科学和工程实践中的各个领域,与各个领域的专业知识相给合,形成了一个个新的交叉学科分支。
关于系统辨识的含义,早在1962年Zacleh 曾作如下定义:“根据系统的输入和输出,在指定的一类系统中确定一个相被辨识系统等价的系统”。
根据这个定义,在系统辨识中必须确定三方面的问题;第一,必须指定一类系统.即根据先验信息确定系统模型的类型。
第二,必须规定一类插入信号。
例如正弦信号、阶跃信号、脉冲信号、白噪声、伪随机信号等。
而且这些信号从时域考虑,必须能持续地激励系统的所有状态;从频域考虑,输入信号的频带能覆盖系统的频带宽度。
第三,必须规定“系统等价”的含义及其度量准则。
2 线性系统的辨识2.1 问题描述考虑如下线性系统:()()()()()()1111a b n a n b z k a z k a z k n bu k b u k n e k +-++-=-++-+L L L L (1) 其中,u(k)为系统激励信号,y(k)为系统输出,e(k)为模型噪声。
其系统模型如图1所示:N(z)u(k)u(k)G(z)y(k)z(k)e(k)++图1 SISO 的系统模型结构图其中G(z -1)是系统函数模型,N(z -1)为有色噪声系统模型,e(k)为白噪声v(k)经过系统函数为N(z -1)的系统后的输出。
系统辨识的常用方法系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型,是现代控制理论中的一个分支。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
传统的系统辨识方法(1)脉冲响应脉冲响应一般是指系统在输入为单位冲激函数时的输出(响应)。
对于连续时间系统来说,冲激响应一般用函数h(t)来表示.对于无随机噪声的确定性线性系统,当输入信号为一脉冲函数δ(t)时,系统的输出响应 h(t)称为脉冲响应函数。
辨识脉冲响应函数的方法分为直接法、相关法和间接法。
①直接法:将波形较理想的脉冲信号输入系统,按时域的响应方式记录下系统的输出响应,可以是响应曲线或离散值。
②相关法:由著名的维纳—霍夫方程得知:如果输入信号u(t)的自相关函数R(t)是一个脉冲函数kδ(t), 则脉冲响应函数在忽略一个常数因子意义下等于输入输出的互相关函数,即 h(t)=(1/k)Ruy(t)。
实际使用相关法辨识系统的脉冲响应时,常用伪随机信号作为输入信号,由相关仪或数字计算机可获得输入输出的互相关函数Ruy(t),因为伪随机信号的自相关函数 R(t)近似为一个脉冲函数,于是h(t)=(1/k)Ruy(t).这是比较通用的方法。
也可以输入一个带宽足够宽的近似白噪声信号,得到h (t)的近似表示。
③间接法:可以利用功率谱分析方法,先估计出频率响应函数H(ω),然后利用傅里叶逆变换将它变换到时域上,于是便得到脉冲响应h(t)。
(2)最小二乘法最小二乘法(LS)是一种经典的数据处理方法, 但由于最小二乘估计是非一致的、有偏差的, 因而为了克服它的不足, 形成了一些以最小二乘法为基础的辨识方法:广义最小二乘法(GLS)、辅助变量法(IVA)和增广矩阵法(EM),以及将一般的最小二乘法与其它方法相结合的方法,有相关分析——-最小二乘两步法(COR —LS)和随机逼近算法.(3)极大似然法极大似然法(ML)对特殊的噪声模型有很好的性能,具有很好的理论保证;但计算耗费大, 可能得到的是损失函数的局部极小值。
最小二乘辨识模型形式最小二乘辨识模型形式是一种常用的辨识方法,其可以通过对观测数据进行数学分析,得到一个最简单的数学模型,从而准确模拟实际系统的行为。
这种方法适用于线性和非线性系统,并且可以有效地处理带有噪声的数据。
下面是该方法的形式介绍:一、最小二乘法基本原理最小二乘法是一种数学优化方法,它的基本思想是,在数据给定的情况下,通过对观测数据的误差平方和最小化,从多个函数模型中选出一个最优的模型,从而找到最佳的参数估计值。
二、最小二乘辨识步骤最小二乘辨识模型形式包含以下步骤:1. 确定模型结构首先需要确定辨识对象,并且对其进行建模,确定其数学模型结构。
这一步需要根据实际情况,选择合适的模型结构。
2. 建立试验计划根据辨识对象的性质和要求,设计合理的试验计划。
这一步需要在实验中考虑到测量误差、观测数据的稳定性等因素。
3. 收集数据按照试验计划进行数据采集,获得观测数据。
观测数据的质量对辨识结果至关重要。
4. 估计参数通过最小化误差平方和,确定模型中的参数值。
这一步需要采用数学分析方法,在保证数值稳定和误差最小的条件下,利用收集到的数据进行参数估计。
5. 模型确认通过模型验证,判断辨识结果的可靠性。
这一步需要通过比较模型输出和实际测试输出的情况,检验模型是否准确。
三、最小二乘辨识应用领域最小二乘辨识模型形式广泛应用于自动化控制、仪器仪表、机械制造、通信、金融等各个领域。
在实际应用中,最小二乘辨识模型形式有着广泛的应用前景。
总之,最小二乘辨识模型形式是一种常用的辨识方法,其优点是可以通过简单的数学方法,确定合理的模型结构和参数值,并可以有效地处理带有噪声的数据。
在实际应用中,它有着广泛的应用前景。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。