现代控制理论-第14章-最小二乘法辨识
- 格式:ppt
- 大小:2.14 MB
- 文档页数:30
控制系统设计中的模型鉴别方法综述在控制系统设计中,模型鉴别方法是一项关键性工作。
模型鉴别方法可以帮助工程师准确地识别出待控系统的数学模型,为后续的控制器设计和性能优化提供基础。
本文将对控制系统设计中常用的模型鉴别方法进行综述。
一、最小二乘法最小二乘法是一种常见的模型鉴别方法,它通过最小化误差的平方和来拟合实际测量数据和理论模型之间的差异。
最小二乘法可以用于线性和非线性模型的鉴别。
对于线性模型,最小二乘法可以通过矩阵运算求解最优解。
而对于非线性模型,最小二乘法可以通过迭代优化算法求解。
二、频域方法频域方法是一种将系统响应与频率特性相关联的模型鉴别方法。
它通常基于输入和输出信号的频谱分析,可以用于连续时间和离散时间系统。
频域方法可以采用傅里叶变换、拉普拉斯变换等数学工具,通过求解传递函数或频率响应函数来获得系统模型。
频域方法适用于具有周期性输入和输出信号的系统。
三、时域方法时域方法是一种将系统响应与时间域特性相关联的模型鉴别方法。
它通常基于实际采集到的离散时间数据,通过插值、拟合等技术来获得离散时间系统的模型。
时域方法可以采用多项式插值、曲线拟合等数学工具,通过建立系统差分方程或状态空间模型来进行模型鉴别。
时域方法适用于实际工程中获得的离散时间数据。
四、系统辨识方法系统辨识方法是一种通过试验数据来识别系统动态特性的模型鉴别方法。
它可以通过对系统施加特定的输入信号,观测系统输出响应来获得系统模型。
系统辨识方法可以分为参数辨识和非参数辨识两种方法。
参数辨识方法假设系统具有某种结构,通过最小化残差的平方和来确定模型参数。
非参数辨识方法不对系统结构进行假设,通过直接拟合试验数据来获得系统模型。
五、神经网络方法神经网络方法是一种基于人工神经网络的模型鉴别方法。
它可以通过输入输出数据训练神经网络,从而获得系统的模型。
神经网络方法可以适用于非线性系统的建模和鉴别。
神经网络方法具有较强的自适应能力和非线性拟合能力,但对于网络结构和训练样本的选择具有一定的要求。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
---------------------------------------------------------------最新资料推荐------------------------------------------------------系统辨识—最小二乘法最小二乘法参数辨识 1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类={M}(即给定一类已知结构的模型),一类输入信号 u 和等价准则 J=L(y,yM)(一般情况下,J 是误差函数,是过程输出 y 和模型输出 yM 的一个泛函);然后选择使误差函数J 达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使1 / 17用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
最小二乘法参数辨识201403027摘要:系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小二乘法是一种应用极其广泛的系统辨识方法.阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析说明了最小二乘法应用于系统辨识中的重要意义.关键词:最小二乘法;系统辨识;动态系统Abstract: System identification in engineering is widely used, system identification methods there are many ways, least squares method is a very wide range of application of system identification method and the least squares method elaborated establish a dynamic system models in System Identification applications and examples analyzed by the least squares method is applied to illustrate the importance of system identification.Keywords: Least Squares; system identification; dynamic system引言随着科学技术的不断发展,人们认识自然、利用自然的能力越来越强,对于未知对象的探索也越来越深入.我们所研究的对象,可以依据对其了解的程度分为三种类型:白箱、灰箱和黑箱.如果我们对于研究对象的内部结构、内部机制了解很深入的话,这样的研究对象通常称之为“白箱”;而有的研究对象,我们对于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”.研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律.对于动态系统辨识的方法有很多,但其中应用最广泛,辨识效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义.1.1 系统辨识简介系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
最小二乘法在系统辨识中的应用王文进控制科学与控制工程学院 控制理论与控制工程专业 2009010211摘要:在实际的工程中,经常要对一个系统建立数学模型。
很多时候,要面对一个未知的系统,对于这些未知系统,我们所知道的仅仅是它们的一些输入输出数据,我们要根据这些测量的输入输出数据,建立系统的数学模型。
由此诞生了系统辨识这门科学,系统辨识就是研究怎样利用对未知系统的输入输出数据建立描述系统的数学模型的科学。
系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小二乘法是一种应用及其广泛的系统辨识方法。
本文主要讲述了最小二乘估计在系统辨识中的应用。
首先,为了便于介绍,用一个最基本的单输入单输出模型来引入系统辨识中的最小二乘估计。
例如:y = ax + (1)其中:y、x 可测,为不可测的干扰项,a未知参数。
通过N 次实验,得到测量数据y k和x k ,其中k=1、2、3、…,我们所需要做的就是通过这N次实验得到的数据,来确定未知参数a 。
在忽略不可测干扰项的前提下,基本的思想就是要使观测点y k和由式(1)确定的估计点y的差的平方和达到最小。
用公式表达出来就是要使J最小:确定未知参数a的具体方法就是令: J a = 0 , 导出 a通过上面最基本的单输入单输出模型,我们对系统辨识中的最小二乘法有了初步的了解,但在实际的工程中,系统一般为多输入系统,下面就用一个实际的例子来分析。
在接下来的表述中,为了便于区分,向量均用带下划线的字母表示。
水泥在凝固过程中,由于发生了一系列的化学反应,会释放出一定的热量。
若水泥成分及其组成比例不同,释放的热量也会不同。
水泥凝固放热量与水泥成分的关系模型如下:y = a0+ a1x1+…+ a n x n +其中,y为水泥凝固时的放热量(卡/克);x1~x2为水泥的几种成分。
引入参数向量: = [ a0,a1,…,a n ]T经过N次试验,得出N个方程: y k = k T + k ; k=1、2…、N其中:k = [ 1,x1,x2,…,x N ]T方程组可用矩阵表示为: y = +其中:y = [ y1,y2,…,y N ] T = [ 1,2,…,N ] T估计准则:有=(y - )T( y - )J = y T y + T T - y T - T T y= y T y + T T - 2 T T y假设:(T)满秩,由根据矩阵值函数对矩阵变量的导数和数量函数对矩阵变量的导数可以得出以下两个公式:和有:和所以:解出参数估计向量:=(T)-1 T yLs至此,水泥的凝固放热量与水泥的成分关系模型即建立起来了。
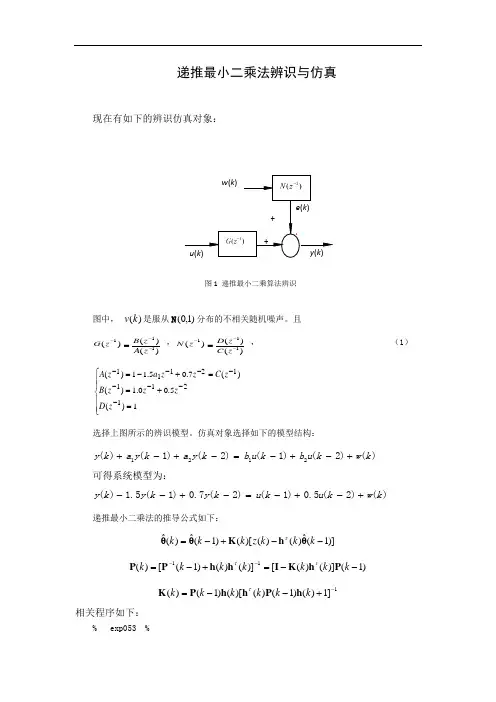
递推最小二乘法辨识与仿真现在有如下的辨识仿真对象:图中, )(k v 是服从N )1,0(分布的不相关随机噪声。
且)(1-zG )()(11--=z A z B ,)(1-z N )()(11--=zC zD , (1)⎪⎪⎩⎪⎪⎨⎧=+==+-=--------1)(5.00.1)()(7.05.11)(121112111z D z zz B z C z z a z A选择上图所示的辨识模型。
仿真对象选择如下的模型结构:)()2()1()2()1()(2121k w k u b k u b k y a k y a k y +-+-=-+-+可得系统模型为:)()2(5.0)1()2(7.0)1(5.1)(k w k u k u k y k y k y +-+-=-+-- 递推最小二乘法的推导公式如下:)]1(ˆ)()()[()1(ˆ)(ˆ--+-=k k k z k k k θh K θθτ )1()]()([)]()()1([)(11--=+-=--k k k k k k k τP h K I h h PP τ1]1)()1()()[()1()(-+--=k k k k k k h P h h P K τ相关程序如下:% exp053 %%递推最小二乘法程序%clear%清理工作间变量L=55;% M序列的周期y1=1;y2=1;y3=1;y4=0;%四个移位寄存器的输出初始值for i=1:L;%开始循环,长度为Lx1=xor(y3,y4);%第一个移位积存器的输入是第3个与第4个移位积存器的输出的“或”x2=y1;%第二个移位积存器的输入是第3个移位积存器的输出x3=y2;%第三个移位积存器的输入是第2个移位积存器的输出x4=y3;%第四个移位积存器的输入是第3个移位积存器的输出y(i)=y4;%取出第四个移位积存器幅值为"0"和"1"的输出信号,if y(i)>0.5,u(i)=-0.03;%如果M序列的值为"1"时,辨识的输入信号取“-0.03”else u(i)=0.03;%当M序列的值为"0"时,辨识的输入信号取“0.03”end%小循环结束y1=x1;y2=x2;y3=x3;y4=x4;%为下一次的输入信号做准备end%大循环结束,产生输入信号uw=normrnd(0, sqrt(0.1), 1, 55);%加入白噪声figure(1);%第1个图形,伪随机序列stem(u),grid on%以径的形式显示出输入信号并给图形加上网格z(2)=0;z(1)=0;%取z的前两个初始值为零for k=3:55;%循环变量从3到55z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2)+w(k);%给出理想的辨识输出采样信号endc0=[0.001 0.001 0.001 0.001,0.001]';%直接给出被辨识参数的初始值,即一个充分小的实向量p0=10^6*eye(5,5);%直接给出初始状态P0,即一个充分大的实数单位矩阵E=0.000000005;%相对误差E=0.000000005c=[c0,zeros(5,54)];%被辨识参数矩阵的初始值及大小e=zeros(5,55);%相对误差的初始值及大小for k=3:55; %开始求Kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2),w(k)]'; x=h1'*p0*h1+1; x1=inv(x); %开始求K(k)k1=p0*h1*x1;%求出K的值d1=z(k)-h1'*c0; c1=c0+k1*d1;%求被辨识参数ce1=c1-c0;%求参数当前值与上一次的值的差值e2=e1./c0;%求参数的相对变化e(:,k)=e2; %把当前相对变化的列向量加入误差矩阵的最后一列c0=c1;%新获得的参数作为下一次递推的旧参数c(:,k)=c1;%把辨识参数c 列向量加入辨识参数矩阵的最后一列p1=p0-k1*k1'*[h1'*p0*h1+1];%求出 p(k)的值p0=p1;%给下次用if e2<=E break;%若参数收敛满足要求,终止计算end%小循环结束end%大循环结束c;%显示被辨识参数e;%显示辨识结果的收敛情况%分离参数a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:);d1=c(5,:);ea1=e(1,:); ea2=e(2,:); eb1=e(3,:); eb2=e(4,:);figure(2);%第2个图形i=1:55;%横坐标从1到55plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':',i,b1,'k') %画出a1,a2,b1,b2的各次辨识结果title('系统辨识结果')%图形标题如果系统中的参数为:⎪⎪⎩⎪⎪⎨⎧+-=+==+-=----------211211121112.01)(5.00.1)()(7.05.11)(z z z D z zz B z C z z a z A 那么系统模型机构为:)2(2.0)1()()2(5.0)1()2(7.0)1(5.1)(-+--+-+-=-+--k w k w k w k u k u k y k y k y 相关程序如下: % exp054.m % %递推最小二乘法编程%clear%清理工作间变量 L=55;% M 序列的周期y1=1;y2=1;y3=1;y4=0;%四个移位寄存器的输出初始值 for i=1:L;%开始循环,长度为Lx1=xor(y3,y4);%第一个移位积存器的输入是第3个与第4个移位积存器的输出的“或” x2=y1;%第二个移位积存器的输入是第3个移位积存器的输出 x3=y2;%第三个移位积存器的输入是第2个移位积存器的输出 x4=y3;%第四个移位积存器的输入是第3个移位积存器的输出 y(i)=y4;%取出第四个移位积存器幅值为"0"和"1"的输出信号,if y(i)>0.5,u(i)=-0.03;%如果M序列的值为"1"时,辨识的输入信号取“-0.03”else u(i)=0.03;%当M序列的值为"0"时,辨识的输入信号取“0.03”end%小循环结束y1=x1;y2=x2;y3=x3;y4=x4;%为下一次的输入信号做准备end%大循环结束,产生输入信号uw=normrnd(0, sqrt(0.1), 1, 55);figure(1);%第1个图形,伪随机序列stem(u),grid on%以径的形式显示出输入信号并给图形加上网格z(2)=0;z(1)=0;%取z的前两个初始值为零for k=3:55;%循环变量从3到55z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2)+w(k)-w(k-1)+0.2*w(k-2);%给出理想的辨识输出采样信号endc0=[0.001 0.001 0.001 0.001,0.001]';%直接给出被辨识参数的初始值,即一个充分小的实向量p0=10^6*eye(5,5);%直接给出初始状态P0,即一个充分大的实数单位矩阵E=0.000000005;%相对误差E=0.000000005c=[c0,zeros(5,54)];%被辨识参数矩阵的初始值及大小e=zeros(5,55);%相对误差的初始值及大小for k=3:55; %开始求Kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2),w(k),w(k-1),w(k-2)]';x=h1'*p0*h1+1; x1=inv(x); %开始求K(k)k1=p0*h1*x1;%求出K的值d1=z(k)-h1'*c0; c1=c0+k1*d1;%求被辨识参数ce1=c1-c0;%求参数当前值与上一次的值的差值e2=e1./c0;%求参数的相对变化e(:,k)=e2; %把当前相对变化的列向量加入误差矩阵的最后一列c0=c1;%新获得的参数作为下一次递推的旧参数c(:,k)=c1;%把辨识参数c 列向量加入辨识参数矩阵的最后一列p1=p0-k1*k1'*[h1'*p0*h1+1];%求出 p(k)的值p0=p1;%给下次用if e2<=E break;%若参数收敛满足要求,终止计算end%小循环结束end%大循环结束c;%显示被辨识参数e;%显示辨识结果的收敛情况%分离参数a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:);d1=c(5,:);d2=c(6,:);d3=c(7,:); figure(2);%第2个图形i=1:55;%横坐标从1到55plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':',i,d1,'k',i,d2,':',i,d3,'*') %画出a1,a2,b1,b2的各次辨识结果title('系统辨识结果')%图形标题。
最小二乘辨识方法的优劣比较摘 要:本文系统的探讨了三种最小二乘类辨识方法的原理和性能,并对各种方法在各种不同的环境下进行了MATLAB 仿真,仿真结果证明:最小二乘法不适合实时处理,在同等情况下,递推最小二乘的辨识速度较快,但在有色噪声干扰下效果不理想,广义最小二乘法的辨识效果最好,且不受噪声是否有色的影响,但是费时最多。
关键词:最小二乘 辨识速度 MATLAB 仿真1 引言系统辨识是一门介于现代控制理论和系统理论的边缘学科.它将现代控制论的平滑、滤波、预测和参数估计理论,以及系统论的系统分析方法和建模思想应用于自然科学、社会科学和工程实践中的各个领域,与各个领域的专业知识相给合,形成了一个个新的交叉学科分支。
关于系统辨识的含义,早在1962年Zacleh 曾作如下定义:“根据系统的输入和输出,在指定的一类系统中确定一个相被辨识系统等价的系统”。
根据这个定义,在系统辨识中必须确定三方面的问题;第一,必须指定一类系统.即根据先验信息确定系统模型的类型。
第二,必须规定一类插入信号。
例如正弦信号、阶跃信号、脉冲信号、白噪声、伪随机信号等。
而且这些信号从时域考虑,必须能持续地激励系统的所有状态;从频域考虑,输入信号的频带能覆盖系统的频带宽度。
第三,必须规定“系统等价”的含义及其度量准则。
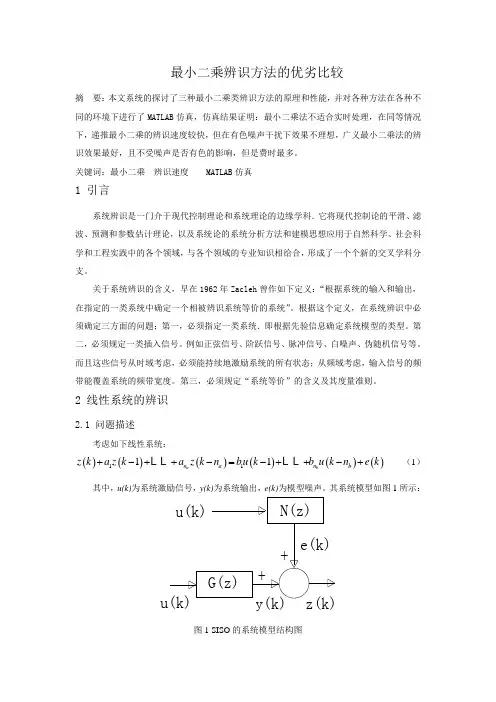
2 线性系统的辨识2.1 问题描述考虑如下线性系统:()()()()()()1111a b n a n b z k a z k a z k n bu k b u k n e k +-++-=-++-+L L L L (1) 其中,u(k)为系统激励信号,y(k)为系统输出,e(k)为模型噪声。
其系统模型如图1所示:N(z)u(k)u(k)G(z)y(k)z(k)e(k)++图1 SISO 的系统模型结构图其中G(z -1)是系统函数模型,N(z -1)为有色噪声系统模型,e(k)为白噪声v(k)经过系统函数为N(z -1)的系统后的输出。
最小二乘辨识模型形式
最小二乘辨识模型是一种常用的数据分析方法,它可以通过对数据进行拟合,得到一个最优的数学模型,从而对未知数据进行预测和分析。
在最小二乘辨识模型中,我们首先需要确定一个数学模型的形式,例如线性模型、非线性模型等。
然后,我们通过收集一定量的数据,利用最小二乘法对模型进行拟合,得到最优的模型参数。
最小二乘法是一种常用的优化方法,它的基本思想是通过最小化误差平方和来确定模型参数。
具体来说,我们假设模型的输出为y,输入为x,模型参数为θ,误差为ε,则最小二乘法的目标是最小化以下函数:
J(θ) = ∑(y - f(x,θ))^2
其中,f(x,θ)表示模型的输出,∑表示对所有数据进行求和。
通过求解J(θ)的最小值,我们可以得到最优的模型参数θ。
最小二乘辨识模型在实际应用中具有广泛的应用,例如在金融、医疗、工业等领域中,都可以利用最小二乘辨识模型对数据进行分析和预测。
例如,在金融领域中,我们可以利用最小二乘辨识模型对股票价格进行预测,从而指导投资决策;在医疗领域中,我们可以利用最小二乘辨识模型对疾病的发展趋势进行预测,从而指导治疗方案的制定。
最小二乘辨识模型是一种非常实用的数据分析方法,它可以帮助我们对数据进行拟合和预测,从而指导实际应用中的决策和行动。
最小二乘辨识模型形式最小二乘辨识模型形式是一种常用的辨识方法,其可以通过对观测数据进行数学分析,得到一个最简单的数学模型,从而准确模拟实际系统的行为。
这种方法适用于线性和非线性系统,并且可以有效地处理带有噪声的数据。
下面是该方法的形式介绍:一、最小二乘法基本原理最小二乘法是一种数学优化方法,它的基本思想是,在数据给定的情况下,通过对观测数据的误差平方和最小化,从多个函数模型中选出一个最优的模型,从而找到最佳的参数估计值。
二、最小二乘辨识步骤最小二乘辨识模型形式包含以下步骤:1. 确定模型结构首先需要确定辨识对象,并且对其进行建模,确定其数学模型结构。
这一步需要根据实际情况,选择合适的模型结构。
2. 建立试验计划根据辨识对象的性质和要求,设计合理的试验计划。
这一步需要在实验中考虑到测量误差、观测数据的稳定性等因素。
3. 收集数据按照试验计划进行数据采集,获得观测数据。
观测数据的质量对辨识结果至关重要。
4. 估计参数通过最小化误差平方和,确定模型中的参数值。
这一步需要采用数学分析方法,在保证数值稳定和误差最小的条件下,利用收集到的数据进行参数估计。
5. 模型确认通过模型验证,判断辨识结果的可靠性。
这一步需要通过比较模型输出和实际测试输出的情况,检验模型是否准确。
三、最小二乘辨识应用领域最小二乘辨识模型形式广泛应用于自动化控制、仪器仪表、机械制造、通信、金融等各个领域。
在实际应用中,最小二乘辨识模型形式有着广泛的应用前景。
总之,最小二乘辨识模型形式是一种常用的辨识方法,其优点是可以通过简单的数学方法,确定合理的模型结构和参数值,并可以有效地处理带有噪声的数据。
在实际应用中,它有着广泛的应用前景。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
目录一、系统辨识的定义.................................................................................................................. - 2 -二、最小二乘法的引出.............................................................................................................. - 2 -三、最小二乘法的原理.............................................................................................................. - 3 -3.1 最小二乘法一次完成推导[1]........................................................................................ - 3 -3.2最小二乘法的缺陷[ 5].................................................................................................... - 5 -四、其他系统辨识方法.............................................................................................................. - 5 -4.1 基于BP神经网络的系统辨识方法特点[3]................................................................. - 5 -4.2 基于遗传算法的系统辨识算法................................................................................... - 6 -五、结论...................................................................................................................................... - 7 -六、参考文献.............................................................................................................................. - 7 -系统辨识方法简介摘要:在研究一个控制系统过程中,建立系统的模型十分必要。