全液压自行走平板车电液调平系统研制
- 格式:pdf
- 大小:561.88 KB
- 文档页数:5
高技术的现代战争要求地面雷达具有良好的机动性能。
雷达天线车的快速架设、调平和撤收系统是雷达的重要系统之一,直接影响到雷达的机动性能。
电液比例控制技术填补了开关液压控制技术与伺服控制技术之间的空白,已成为液压技术中最富活力的分支。
把电液比例阀控技术成功地应用雷达车调平系统中,对于提升雷达机动性能具有重要的意义。
本文所介绍的电液比例阀控液压自动调平系统,采用了比例多路阀控制,多个调平支腿执行元件可以实现不受负载约束的无级调速控制,这是实现高效调平性能的关键。
1 调平系统特点某雷达天线车自重45 t,要求工作状态时天线水平基准小于3’,整车展开并完成调平的时间控制在2 min以内。
雷达车采用四点支撑实现系统调平的方式。
系统设计采用液压作为动力源,由电机一液压泵驱动,通过液压控制阀控制四条液压支腿的升降运动,将天线车由运输状态转架为正常工作状态,并保持水平状态的稳定。
要实现本系统的功能有两个关键技术需要解决:一是调平支腿的性能问题;二是驱动控制方式和控制策略问题。
本系统方案摒弃了常规的开关阀控设计,采用性能更为先进的电液比例控制技术,提升液压系统执行机构的控制性能,实现多个执行元件同时相互独立地在不同的速度和压力下工作,使得调平控制更为灵活,实现柔性的控制策略;功能上解决了落地检测的问题,实现了一键式调平的全自动功能,有效地保证了调平时间指标的实现。
调平支腿采用带抱闸制动功能的液压马达驱动滚珠丝杆的结构设计,机械效率高,承载能力强,满足了大吨位雷达车的使用要求;通过专门研制的液压马达制动控制阀集成模块对调平支腿实施驱动和控制。
该设计方案在满足系统要求的前提下,具备了技术的先进性,同时具有很好的通用性和可扩展性。
2 系统设计2.1液压系统工作原理及工作过程液压调平系统原理图如图1所示,液压泵采用负载敏感恒功率变量泵,泵源额定压力为180 bar,最大流量为90 L/min,电机功率11 kW。
图1液压系统原理图液压比例控制阀为负载敏感式换向阀,从执行元件通路引出的控制油信号经过换向滑阀中的信号孔引出,然后合成一个公共的信号通路,并且保证只是从某一侧获得的控制压差作用于流量调节装置。
《重型平板车自动调平控制系统的研究》篇一一、引言随着工业自动化水平的不断提高,重型平板车在各个工业领域的应用日益广泛。
而自动调平控制系统作为其核心技术,直接关系到平板车的工作效率和稳定性。
本文将着重研究重型平板车自动调平控制系统的相关内容,旨在提升系统的智能化和稳定性,以适应现代工业的复杂环境。
二、背景与意义重型平板车是现代工业中常用的搬运工具,常用于物料搬运、大型设备安装等场合。
由于作业环境的复杂性,平板车的平稳性和调平性能直接影响到作业的精度和安全性。
因此,研究开发一种能够自动快速地调整车体水平位置的调平控制系统显得尤为重要。
自动调平控制系统不仅可以提高工作效率,还能减少人工操作带来的误差和安全隐患。
此外,该系统还能在恶劣环境下保持稳定的工作性能,为工业生产提供有力保障。
因此,对重型平板车自动调平控制系统的研究具有重要的理论意义和实际应用价值。
三、相关文献综述近年来,国内外学者对重型平板车的自动调平控制系统进行了广泛的研究。
主要包括系统结构的设计、传感器技术的运用、控制算法的优化等方面。
在系统结构设计方面,多采用液压驱动或电动驱动的方式,以实现快速响应和平稳运行。
在传感器技术方面,主要运用倾角传感器、压力传感器等设备,以实时监测车体的状态。
在控制算法方面,多采用PID控制、模糊控制等算法,以实现精确的调平控制。
四、系统设计及工作原理4.1 系统设计重型平板车自动调平控制系统主要由传感器模块、控制模块和执行模块三部分组成。
传感器模块负责实时监测车体的状态信息;控制模块根据传感器信息,通过控制算法计算出调整量,并输出控制指令;执行模块根据控制指令,驱动执行机构进行相应的动作,以实现车体的调平。
4.2 工作原理系统工作时,传感器模块实时采集车体的倾角、压力等状态信息,并将这些信息传输给控制模块。
控制模块根据预设的算法对状态信息进行处理,计算出调整量,并输出控制指令给执行模块。
执行模块根据控制指令驱动液压缸或电机等执行机构进行相应的动作,使车体达到水平状态。
《重型平板车自动调平控制系统的研究》篇一一、引言随着现代工业的快速发展,重型平板车在物流、仓储、机械制造等领域的应用越来越广泛。
然而,重型平板车的平稳性和调平问题一直是影响其使用效率和安全性的关键因素。
因此,研究并开发一种高效、准确的自动调平控制系统对于提升重型平板车的性能具有十分重要的意义。
本文将就重型平板车自动调平控制系统的相关内容进行深入研究和分析。
二、研究背景及意义重型平板车作为物流和工业运输的重要工具,其平稳性和调平性能直接影响到工作效率和货物安全。
传统的调平方法主要依靠人工操作,不仅效率低下,而且难以保证调平的准确性。
因此,研究并开发一种自动调平控制系统,能够实现平板车的快速、准确调平,提高工作效率,降低人工成本,同时也能保证货物运输的安全性。
三、系统构成及工作原理1. 系统构成重型平板车自动调平控制系统主要由传感器模块、控制模块和执行模块三部分组成。
传感器模块负责采集平板车的倾斜信息;控制模块根据传感器采集的数据进行计算,输出控制指令;执行模块根据控制指令驱动液压系统或电动系统进行调平操作。
2. 工作原理系统通过传感器实时监测平板车的倾斜状态,将数据传输至控制模块。
控制模块对数据进行处理和分析,判断平板车的倾斜程度和方向,然后输出相应的控制指令。
执行模块根据控制指令驱动液压系统或电动系统进行调平操作,使平板车达到水平状态。
四、关键技术及算法研究1. 传感器技术传感器是自动调平控制系统的关键部件,其性能直接影响到系统的调平精度和响应速度。
因此,研究高性能的传感器技术是提高自动调平控制系统性能的重要途径。
目前,常用的传感器包括倾角传感器、压力传感器等。
2. 控制算法研究控制算法是自动调平控制系统的核心,其性能直接影响到系统的调平速度和准确性。
常用的控制算法包括PID控制、模糊控制、神经网络控制等。
针对重型平板车的调平特点,研究适合的控制算法对于提高系统的性能具有重要意义。
五、系统性能测试及分析为了验证自动调平控制系统的性能,我们进行了大量的实验测试。
4机械设计与制造M achi ner y D es i gn&M anuf act ur e第12期2010年12月文章编号:100l-3997(20I O)12—0004-02基于模糊PI D方法的全液压四轮驱动底盘电液防滑控制系统设计采左志字t倪静-韩绿化1张晓东1顾建2毛罕平1(,江苏大学现代农业装备与技术省部共建教育部重点实验室/j:工苏省重点实验室,镇江212013)(2江苏大学工业中心,镇江212013)D eSi gn O f d r i V e eI eCt r O—hydr aU¨C ant i—Sl ip r e gU l at i O n bas ed0n f U Z zy—PI D cO nt r O IzuO zhi—-yul,N I J i n一,H A N LV—-hual,zH A N G xi ao—don91,G u J i an2,M A O H an—pi n季(1K ey Laborat ory of M odem A g打cul t ura l E qu i pm e nt and Tbchnol o gy,M i ni s t r y of E ducat i on&Ji a ngsu Pm V i nc e,J i angs u U ni ve碍崎,Zhenj i ang212013,C hi na)(2I ndust ri a l C e nt er,Ji a ngs u U ni ver si t y,Zhenj i ang212013,C hi na)矿”o∞“b∞“日∞“m∞ocD∞““”。
“”““。
““—”““”。
o“4”誓—””“”—“””““””“。
”“4”“““”“““”“”国3【摘要】针对高地隙自走式底盘,提出了基于模糊PID控制的驱动电液防滑方法,即利用模糊控;l制判断四轮打滑情况,采用PID方法对打滑车轮进行调节。
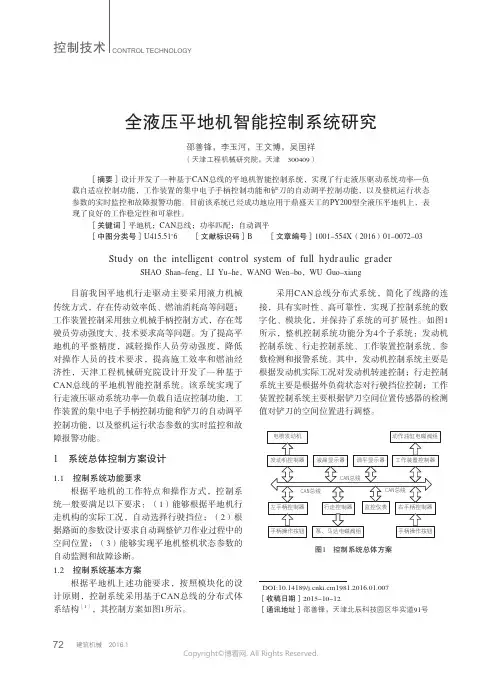
控制技术CONTROL TECHNOLOGY全液压平地机智能控制系统研究邵善锋,李玉河,王文博,吴国祥(天津工程机械研究院,天津300409)[摘要]设计开发了一种基于CAN总线的平地机智能控制系统,实现了行走液压驱动系统功率—负载自适应控制功能,工作装置的集中电子手柄控制功能和铲刀的自动调平控制功能,以及整机运行状态参数的实时监控和故障报警功能。
目前该系统已经成功地应用于鼎盛天工的PY200型全液压平地机上,表现了良好的工作稳定性和可靠性。
[关键词]平地机;CAN总线;功率匹配;自动调平[中图分类号]U415.51+6 [文献标识码]B [文章编号]1001-554X(2016)01-0072-03Study on the intelligent control system of full hydraulic graderSHAO Shan-feng,LI Yu-he,WANG Wen-bo,WU Guo-xiang目前我国平地机行走驱动主要采用液力机械传统方式,存在传动效率低、燃油消耗高等问题;工作装置控制采用独立机械手柄控制方式,存在驾驶员劳动强度大、技术要求高等问题。
为了提高平地机的平整精度,减轻操作人员劳动强度,降低对操作人员的技术要求,提高施工效率和燃油经济性,天津工程机械研究院设计开发了一种基于CAN总线的平地机智能控制系统。
该系统实现了行走液压驱动系统功率—负载自适应控制功能,工作装置的集中电子手柄控制功能和铲刀的自动调平控制功能,以及整机运行状态参数的实时监控和故障报警功能。
1 系统总体控制方案设计1.1 控制系统功能要求根据平地机的工作特点和操作方式,控制系统一般要满足以下要求:(1)能够根据平地机行走机构的实际工况,自动选择行驶挡位;(2)根据路面的参数设计要求自动调整铲刀作业过程中的空间位置;(3)能够实现平地机整机状态参数的自动监测和故障诊断。
1.2 控制系统基本方案根据平地机上述功能要求,按照模块化的设计原则,控制系统采用基于CAN总线的分布式体系结构[1],其控制方案如图1所示。
《重型平板车自动调平控制系统的研究》篇一一、引言随着工业自动化水平的不断提高,重型平板车在各个工业领域的应用日益广泛。
而自动调平控制系统作为其核心技术之一,对于提升工作效率、保障作业安全以及优化设备性能具有重要作用。
本文旨在研究重型平板车自动调平控制系统的相关内容,为相关领域的研究和应用提供理论支持和实践指导。
二、研究背景与意义在工业生产过程中,重型平板车常用于物料搬运、设备安装等场景。
由于作业环境复杂多变,平板车的平稳性和调平性能对于提高工作效率和保障安全至关重要。
传统的调平方法主要依靠人工操作,不仅效率低下,而且难以满足高精度、高效率的作业要求。
因此,研究并开发重型平板车自动调平控制系统,具有重要的理论意义和实用价值。
三、系统组成与工作原理1. 硬件组成重型平板车自动调平控制系统主要由传感器模块、执行器模块、控制器模块等组成。
传感器模块负责实时检测平板车的倾斜状态和水平位置;执行器模块包括液压缸、电机等,负责根据控制器的指令进行调平动作;控制器模块是系统的核心,负责接收传感器信号,处理后输出控制指令。
2. 软件算法软件算法是自动调平控制系统的关键部分,主要包括数据采集、信号处理、控制策略等。
数据采集模块负责实时收集传感器信号;信号处理模块对收集到的数据进行处理和分析,提取出有用的信息;控制策略则是根据处理后的信息,制定合适的控制指令,驱动执行器进行调平动作。
四、关键技术分析1. 传感器技术传感器是自动调平控制系统的关键部件之一,其性能直接影响到系统的调平精度和响应速度。
目前常用的传感器包括倾角传感器、激光测距传感器等,需要综合考虑其测量范围、精度、稳定性等因素。
2. 控制算法控制算法是自动调平控制系统的核心,直接影响系统的性能和效果。
常用的控制算法包括PID控制、模糊控制、神经网络控制等。
需要根据实际需求和系统特性,选择合适的控制算法或进行算法优化。
3. 执行器技术执行器是自动调平控制系统的执行部件,其性能直接影响到系统的调平速度和稳定性。
160T液压动力平板车电气控制系统【摘要】这篇文章旨在研究160T液压动力平板车的电气控制系统,其中包括该系统的概述、组成、工作原理、故障分析以及优化建议。
通过对该系统进行深入研究和分析,可以更好地了解其在车辆运行中的作用和性能表现,为系统的改进和优化提供理论支持。
本文从背景介绍、研究意义和研究目的入手,详细介绍了160T液压动力平板车的电气控制系统,并对其进行了全面总结和展望未来研究方向。
通过本篇文章的阅读,读者将能够更全面地了解160T液压动力平板车电气控制系统的相关知识,并对未来的研究方向有所启示。
【关键词】160T液压动力平板车, 电气控制系统, 概述, 组成, 工作原理, 故障分析, 优化建议, 总结, 未来研究方向, 结语1. 引言1.1 背景介绍160T液压动力平板车是一种用于运输大型货物的特种车辆,具有承载能力强、运输效率高的特点。
随着现代物流行业的快速发展,对于这类大型货物运输车辆的需求也在不断增加。
为了提高160T液压动力平板车的性能和安全性,电气控制系统的设计和优化显得尤为重要。
目前,市场上的160T液压动力平板车大多采用传统的机械传动系统,存在着运行效率低、响应速度慢、安全性差等问题。
而采用先进的电气控制系统可以有效解决这些问题,提高车辆的性能和可靠性。
对160T液压动力平板车电气控制系统进行深入研究和优化具有重要的现实意义。
通过改良控制系统的设计和工作原理,可以提高车辆的运行效率和安全性,推动物流行业的进一步发展。
本研究旨在探索160T液压动力平板车电气控制系统的研究现状和存在问题,为未来的优化提供理论依据和实践经验。
1.2 研究意义在研究160T液压动力平板车电气控制系统的过程中,我们不得不意识到这一领域的研究具有重要的意义。
电气控制系统是现代工业生产中不可或缺的一部分,它负责对工业设备进行精确控制和监测,从而保证整个生产过程的稳定性和可靠性。
对于液压动力平板车这样的重型设备来说,其电气控制系统更是至关重要,直接关系到设备的运行安全性和效率。
燕山大学课程设计说明书(机电一体化课程设计)项目名称:100t 平板车悬挂液压系统设计姓名:闫桂山、张帅、宋旭通、孙永海指导教师:郭锐职称:讲师2012-12-17燕山大学课程设计(论文)任务书院(系):机械工程学院基层教学单位:机电控制系项目名称100t 平板车悬挂液压系统设计指导教师姓名郭锐参加学生数(人)4项目考察知识点(1) 培养学生液压元件及系统的设计能力。
(2) 培养学生对液压系统的分析优化能力。
(3) 培养学生使用二维、三维CAD软件以及液压专业仿真软件的能力。
(4) 培养学生在实际操作、分析和解决问题的能力。
(5) 提高学生设计能力及实践能力。
项目需前期知识储备掌握液压传动系统、液压伺服与比例控制系统、气压传动及控制三门课程,精通二维CAD绘图、三维Solidworks设计、掌握PLC电气控制基础。
项目设计参数系统最大工作压力:315bar 系统最大流量:40L/min项目实施内容要求1、原理、选型及计算说明书1份;说明书还包括电气系统设计、试验搭建等所有工作;2、系统原理图;3、泵站三维图;4、用气动力士乐试验台,做一个框架车悬挂系统模拟实验台以及电气系统设计(包括电气梯形图等)。
项目试验内容要求完成框架车悬挂液压系统设计,搭建试验台进行动作试验,在试验中记录相关数据,总结出心得感受,并得出实验测试报告1份。
项目结题须提交材料(1)计算选型说明书1份(2)系统原理图1张(A1)(3)泵站三维图1张(A0)(4)实验测试分析报告1份小组成员分工闫桂山:液压系统设计及相关计算宋旭通:元件的选型及试验台的搭建孙永海:PLC控制回路设计并进行模拟实验张帅:泵站设计及说明书的撰写小组分工及贡献姓名课题组分工闫桂山宋旭通张帅孙永海摘要悬挂液压系统是工程机械运输车诸多液压系统之一,在运输车工作过程,悬挂液压系统起到了提高运输车可靠性与稳定性的功能,能够很好地平稳机身,在凹凸不平的路况,也起到减震作用。
《重型平板车自动调平控制系统的研究》篇一一、引言随着现代工业技术的不断发展,重型平板车在物流、仓储、建筑等领域的应用日益广泛。
而其中,重型平板车的平稳性成为了一个至关重要的性能指标。
为提高其工作稳定性和安全性,自动调平控制系统显得尤为重要。
本文将着重研究重型平板车自动调平控制系统的相关技术及实现方式,旨在为相关研究与应用提供参考。
二、重型平板车自动调平控制系统的意义重型平板车作为工业运输的重要工具,其稳定性直接关系到工作效率和作业安全。
在不平整的路面或工作环境中,若没有有效的调平措施,容易导致车辆侧翻、货物倾倒等安全事故。
因此,开发一套自动调平控制系统对于提高重型平板车的安全性和稳定性具有重要意义。
三、系统组成及工作原理重型平板车自动调平控制系统主要由传感器模块、控制模块和执行模块三部分组成。
1. 传感器模块:负责实时检测平板车的倾斜角度和高度信息,通过高精度的传感器将数据传输至控制模块。
2. 控制模块:接收传感器模块的信号,通过算法处理后,输出控制指令给执行模块,实现调平控制。
3. 执行模块:根据控制模块的指令,驱动液压系统或电动系统调整车辆底部支撑点的高度,从而完成调平动作。
四、关键技术研究1. 传感器技术:选用高精度的角度传感器和高度传感器,确保实时、准确地检测车辆的状态。
2. 控制算法研究:采用先进的控制算法,如模糊控制、PID 控制等,实现对车辆状态的快速响应和精确控制。
3. 执行机构选择:根据实际需求,选择合适的液压系统或电动系统作为执行机构,确保调平动作的快速性和稳定性。
五、系统实现及性能测试1. 系统实现:根据系统组成及关键技术研究,设计并搭建重型平板车自动调平控制系统。
2. 性能测试:通过实际工作环境中的测试,验证系统的稳定性和可靠性。
测试内容包括系统响应时间、调平精度、抗干扰能力等。
六、应用前景及展望重型平板车自动调平控制系统的研究和应用,将极大地提高重型平板车的稳定性和安全性。
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920481830.9(22)申请日 2019.04.11(73)专利权人 大连东鼎工业设备有限公司地址 116035 辽宁省大连市甘井子区新水泥路8号综合楼206室(72)发明人 佟强 李曦 (74)专利代理机构 大连八方知识产权代理有限公司 21226代理人 任洪成(51)Int.Cl.F15B 11/16(2006.01)F15B 13/06(2006.01)F15B 21/041(2019.01)F15B 21/08(2006.01)(54)实用新型名称一种新型板车行走举升液压系统(57)摘要本实用新型公开了一种新型板车行走举升液压系统,涉及工业生产线板车领域,主要包括直流调速电机、齿轮泵、单向阀、换向阀。
直流调速电机连接齿轮泵,齿轮泵的上端连接到管式单向阀,下端连接到吸油过滤器,所述管式单向阀的上方分别连接到两个换向阀,分别控制液压马达的升降和油缸的升降。
本实用新型采用直流电机直驱齿轮泵,通过对直流电机调速,控制系统流量,通过流量控制马达转速,最终控制板车的行走速度,可以实现缓起缓停,且系统发热量很小;系统中换向阀仅作开关换向作用,不参与速度控制,可简化电气控制形式;直流电机作为动力源,可以使用蓄电池供电,安全性提高。
权利要求书1页 说明书2页 附图1页CN 210218258 U 2020.03.31C N 210218258U权 利 要 求 书1/1页CN 210218258 U1.一种新型板车行走举升液压系统,包括:直流调速电机、齿轮泵、吸油过滤器、管式单向阀、板式叠加单向阀、溢流阀、双向节流阀,其特征在于:所述直流调速电机(3)与齿轮泵(2)相连接,所述齿轮泵(2)的下端连接吸油过滤器(1),齿轮泵(2)的上端连接到管式单向阀(4),所述单向阀(4)的上方分别连接到两个换向阀(7),其中一个换向阀(7)的下方连接到板式叠加单向阀(12),在该板式叠加单向阀(12)的下方安装有溢流阀(5),在溢流阀(5)的下方连接回油过滤器(10),所述回油过滤器(10)下方连接到油箱,油箱上方设置有空气滤清器(8);另一个换向阀(7)的下方连接液压锁(6),所述液压锁(6)的下方连接双向节流阀(11),双向节流阀(11)的下方连接到油缸。
160T液压动力平板车电气控制系统1. 引言1.1 背景介绍在实际应用过程中,电气控制系统的可靠性和稳定性成为制约液压动力平板车性能的重要因素。
对于160T液压动力平板车而言,其装载能力大、运行路径长,要求电气控制系统稳定、安全、高效。
对其电气控制系统进行深入研究和优化显得尤为重要。
本文旨在通过对160T液压动力平板车电气控制系统的研究,探讨其构成、工作原理、系统稳定性分析、系统安全性设计及系统优化方案,以期为该领域的研究和应用提供参考和借鉴。
也希望通过本文对未来发展方向的探讨和展望,为液压动力平板车电气控制系统的进一步完善和提升提供一定的指导和支持。
1.2 研究意义电气控制系统在现代工业生产中起着至关重要的作用,它负责控制机械设备的运行和参数调节,是整个生产线的核心部分。
而针对160T液压动力平板车这种大型机械设备,电气控制系统的设计更是至关重要。
研究这种动力平板车的电气控制系统,具有以下几点研究意义:提高生产效率。
通过优化电气控制系统的设计,可以提高160T液压动力平板车的运行效率,减少生产中的停工时间,提高生产线的运行效率,从而实现生产效率的提升。
保障生产安全。
电气控制系统的稳定性和安全性是保障生产线正常运行的关键因素,研究如何设计更加稳定和安全的电气控制系统,可以有效降低生产中发生意外事故的风险,保障生产人员的安全。
促进技术创新。
通过研究160T液压动力平板车的电气控制系统,可以促进相关领域的技术创新和发展,为未来的机械设备电气控制系统设计提供更多的参考和借鉴,推动整个行业的发展。
研究160T液压动力平板车电气控制系统具有重要的研究意义,不仅可以提高生产效率和保障生产安全,还能促进技术创新和行业发展。
对这一领域进行深入研究具有重要意义。
1.3 研究目的研究目的:本文旨在深入探讨160T液压动力平板车电气控制系统的设计与优化问题,通过对系统的构成、工作原理、稳定性分析、安全性设计以及优化方案的研究,旨在提高系统的性能和稳定性,实现更高效、更安全的运行。