3D仿真机器人系统使用说明
- 格式:doc
- 大小:1.45 MB
- 文档页数:30
机器人 3D仿真系统教材天津市太平村第二中学张汝生整理《机器人 3D 仿真系统》使用教程目录前言................................................................................................................................................................................. 错误!未定义书签。
第一部分预备知识.. (2)1.1 虚拟机器人的结构与功能 (2)1.1.1 身体结构 (2)1.1.2 感觉器官 (2)1.1.3 编程语言 (4)1.2 《机器人 3D 仿真系统》能做什么 (4)1.2.1 为机器人编写程序 (4)1.2.2 创建环境 (5)1.2.3 仿真运行 (5)第二部分初试身手 (6)第一课简易机器人安装 (7)第二课机器人前进 (11)第三课机器人转弯 (18)第四课机器人走正方形 (21)第五课机器人走五角星 (26)第六课机器人走圆形 (31)第七课落地扇 (35)第八课机器人测障 (41)第九课机器人走轨迹 (49)第十课机器人走迷宫 (61)第三章稳步前进 (64)第十一课走正方形 (65)第十二课赛车 (69)第十三课曲棍球比赛 (74)第十四课避障 (79)第十五课街道灭火 (82)第十六课消防员灭火 (86)第十七课消防员搜索 (90)第十八课机器人探宝 (94)第十九课射门 (97)第二十课点球 (101)第二十一课测障 (105)第二十二课过人 (108)第四部分我能赢 (111)4.1 灭火比赛 (111)4.2 机器人轨迹比赛 (111)附录一:《机器人3D 仿真系统》的安装 (111)附录二:功能及函数说明 (111)附录三:如何利用工具制作地面纹理 (111)附件四:仿真机器人的端口说明 (111)《机器人 3D 仿真系统》使用教程第一部分预备知识在本章中,我们对《机器人 3D仿真系统》作一个简单介绍,让读者初步了解机器人的结构、传感器和编程语言。
机器人操作手册及使用指南(专业版)一、引言机器人已经成为现代社会不可或缺的一部分,为各行各业提供了许多便利。
本机器人操作手册及使用指南专为在机器人操作领域专业人士提供,旨在帮助各种机器人操作任务的顺利进行。
本手册将详细介绍机器人操作的基本原理、操作步骤以及常见问题的解决方案,以期为用户提供全面的指导和帮助。
二、基本原理1. 机器人分类机器人按照其用途和结构可以分为工业机器人、服务机器人、军用机器人等多种类型。
本手册主要关注工业机器人的操作方法和使用技巧。
2. 机器人工作原理机器人的工作原理包括感知、决策和执行三个主要步骤。
感知环节通过传感器收集环境信息,决策环节通过算法和逻辑进行任务规划和路径确定,执行环节通过执行器执行任务。
三、机器人操作步骤1. 准备工作在操作机器人之前,需要进行以下准备工作:- 确保机器人所需部件完好无损- 检查机器人的电源和供电设施是否正常- 确保机器人的控制器和程序运行正常2. 机器人启动根据具体机器人的型号和品牌,可通过以下步骤启动机器人:- 打开机器人的电源开关- 确保控制器与机器人正常连接- 检查机器人的各个节点是否在线3. 机器人操作根据具体任务需求,进行以下机器人操作:- 根据任务要求编写机器人控制程序- 将控制程序加载到机器人的控制器中- 启动机器人的执行任务4. 机器人沟通当机器人在执行任务时,可以通过以下方式与其进行沟通:- 利用机器人的语音交互系统进行语音指令- 利用机器人的触摸屏进行人机交互- 利用机器人的传感器进行姿态检测和互动五、机器人维护与故障排除1. 机器人维护为了确保机器人的正常运行,以下是一些常见的机器人维护注意事项:- 定期检查机器人的零部件是否磨损或松动- 清洁机器人的表面和传感器,避免灰尘和污渍影响机器人的工作效果- 定期校准机器人的传感器和执行器2. 故障排除在操作机器人过程中,可能会遇到各种故障,以下是一些常见故障及其解决方案:- 机器人不动:检查电源和电缆连接是否正常,检查控制器程序是否正确- 机器人动作异常:检查机器人的执行器是否正常,检查传感器是否损坏或松动- 机器人感知不准确:检查传感器是否干净,是否需要进行校准六、结论本机器人操作手册及使用指南(专业版)详细介绍了机器人操作的基本原理、操作步骤以及常见问题的解决方案。
Virtual Robot3D 仿真虚拟机器人系统使用说明书广州市教育信息中心(电教馆)广东南方数码科技有限公司二零零九年十月目 录第一章 系统启动项 (4)1.1 安装 (4)1.2 启动系统 (4)1.2.1 进入虚拟机器人场地操作界面 (4)1.2.2 进入虚拟机器人模型操作界面 (5)1.2.3 进入虚拟机器人程序操作界面 (6)第二章 系统概述 (7)2.1 场地快捷工具栏 (7)2.1.1 障碍 (7)2.1.2 三维选择 (7)2.1.3 移动实体 (9)2.1.4 场地文件 (9)2.1.5 机器人控制 (10)2.2 模型快捷工具栏 (11)2.2.1 模型 (11)2.3 程序快捷工具栏 (12)2.3.1 程序 (12)2.3.2 子程序 (13)2.3.3 编译 (14)2.3.4 实体 (15)2.3.5 子程序 (16)第三章 功能与操作 (18)3.1 程序的创建 (18)3.1.1 主程序的创建 (18)3.1.2 子程序的创建 (18)3.1.3 私有子程序的创建 (19)3.2 程序的编辑 (20)3.2.1 图形化编程 (20)3.2.2 文字显示区 (20)3.2.3 属性对话框 (21)3.2.4 编译对话框 (22)3.3 实体模块的应用与操作 (22)3.3.1 传感器 (22)3.3.2 执行 (25)3.3.3 流程 (27)3.3.4 其它 (29)3.4 模型的创建与编辑 (31)3.4.1 模型的创建 (31)3.4.2 模型的移动、旋转和缩放 (32)3.4.3 模型属性的编辑 (32)3.5 虚拟机器人的加载与控制 (35)3.5.1 加载虚拟机器人 (35)3.5.2 程序加载 (35)3.5.3 机器人行走控制 (36)3.6 场地漫游 (36)3.7 障碍的添加与编辑 (37)3.7.1 体块 (37)3.7.2 围墙 (37)3.7.3 音源 (37)3.7.4 火焰 (37)第四章 实例操作 (38)4.1 五角星 (57)4.2 六边形 (60)4.3 GPS 传感器 (38)4.4 超声波传感器 (62)4.5 光电传感器 (66)4.6 红外传感器 (48)第五章 VR C 语言编程方法 (69)5.1 交互式C 语言快速指南 (69)5.1.1 快速入门 (69)5.2 交互式C 语言教程 (70)5.2.1 数据对象 (70)5.2.2 语句与表达式 (77)5.2.3 控制语句 (80)5.3 编译错误 (81)第一章 系统启动项1.1 安装首先,双击光盘中的Virtual Robot安装程序setupVirtual Robot.exe,根据 提示选择安装路径和需要安装的组件,完成安装后关闭,重新启动计算机,便可 以运行Virtual robot软件。
《3D 仿真虚拟机器人教师培训》讲 义广州市教育信息中心(电教馆)二 O一 O 年三月目 录第一章 基础知识部分 (3)第二章 虚拟机器人程序设计初步 (8)第三章 超声波传感器和触碰传感器的使用 (11)第四章 红外传感器和光电传感器的使用 (14)第五章 机器人灭火程序分析 (19)第一章 基础知识部分学习目标了解机器人的概念、机器人的应用、机器人发展与未来,介绍机器人教育进入我国 中小学现状分析、开展实体机器人教育的瓶颈,开展3D仿真虚拟机器人教育的优势等, 认识 3D 仿真虚拟机器人软件的组成,以及机器人场地和机器人模型的结构。
掌握对机 器人场地和机器人模型的导入和新建的方法,掌握如何在 3D 仿真机器人软件中机器人 场地和机器人模型的编辑。
重点和难点1、教学重点:3D仿真虚拟机器人场地和机器人模型的运用。
2、教学难点:3D仿真虚拟机器人场地和机器人模型的编辑。
学习内容一、 机器人的概念与应用展示几组机器人图片,让大家了解机器人,在展示任务的同时提出问题,引导大家 认识我们生活中的各种机器人,归纳出机器人的概念。
图1-1 迎宾机器人 图1-2与机器人对话 图1-3 机器人“乐队”(一)什么是机器人?中国的科学家们把机器人定义为:机器人是一种自动化的机器,而且其具备一些与 人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有 高度灵活性的自动化机器。
(二)机器人的应用领域从工业拓广到 农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应 用之广,影响之深,机器人分为军用机器人和民用机器人。
(三)学校开展机器人教育的目的和意义智能机器人融合了机械、电子、传感器、无线通讯、声音识别、图像处理和人工智 能等领域的先进技术。
在中小学开展智能机器人实验活动可以培养学生的动手实践能 力、创新思维能力和团结协作能力,同时也能够适应新课程改革的需要,对提高中小学 生科技素养有着巨大的促进作用。
仿真机的使用说明一、仿真机的安装1、安装仿真机的驱动文件:1.1.将“驱动安装文件”下的“VC2012_4_x86.rar”解压缩并双击安装。
1.2.将“驱动安装文件”下的“VC_x86Runtime.rar”解压缩并双击安装。
1.3.若电脑系统为XP系统,则需将“加密狗驱动-XP.rar”解压缩并双击“dpinst.exe”安装,若电脑系统为Win7系统,则无需安装此程序。
1.4.若电脑系统为XP系统,则需将“dotNetFx35sp1.rar”解压缩,并双击文件夹下的“dotNetFx35setup.exe”安装,若电脑系统为Win7系统,则无需安装此程序。
2.仿真库的安装:2.1.将“仿真机安装包”下的“simstore”解压缩到电脑D盘根目录下(注意:一定要放到D盘根目录下)。
3.将仿真机加密狗插入电脑的USB接口。
4.仿真程序的安装4.1.将“仿真机安装包”下的“XS300CFBI.r ar”解压缩到D盘根目录下。
(注意:一定要放到D盘根目录下)。
二、仿真机的使用1.单机版仿真机的使用:1.1.检查确认仿真机的驱动文件已经安装完毕。
1.2.检查确认仿真机加密狗已经插入电脑的USB接口。
1.3.进入文件夹“D:\XS300CFBI\XS300CFBI_RUN”,双击本地仿真平台的快捷方式“MSP_本地仿真平台”,启动仿真平台。
1.4.进入文件夹“D:\XS300CFBI\XS300CFBI_RUN”,双击本地仿真界面的快捷方式“DCS_本地仿真界面”,启动仿真界面。
2.网络版仿真机的使用2.1.检查确认仿真机的驱动文件已经安装完毕。
2.2.检查确认机房的网络畅通。
2.3.服务端电脑(需要启动仿真平台的电脑)2.3.1.检查确认仿真机加密狗已经插入服务端电脑(需要启动仿真平台的电脑)的USB接口。
2.3.2.进入文件夹“D:\XS300CFBI\XS300CFBI_RUN”,双击本地仿真平台的快捷方式“MSP_网络仿真平台”,启动仿真平台。

机体Hub/连接件/车轮/传感器X-KIT 盒子模块化设计/图形化编程/无线遥控百变创意机器人套件包含X-KIT盒子和应用APP,了解更多详情请至网站: https:///products/X-KIT X-KIT APP3D设计3D打印选择一款内置机器人,创意再设计,完成后导出3D打印文件。
将自动排好的模型文件发送到3D打印机,打印出组件。
参考APP的3D可视化动态拼装指导,把组件拼装到X-KIT Hub机体上。
在图形化编程界面直接选择或重新编写机器人运动程序,并上传。
利用控制面板功能遥控机器人,进行任务挑战或开展各类活动。
组装编程控制温馨提示本流程非固定,不安装任何东西的Hub也可以直接连接APP进行操控机体Hub机体结构2个RGB灯程序启动程序停止万向轮8个电子模块接口3个LED指示灯28个连接孔2个电机轴开关键2 个红外传感器Micro-USB 数据接口/电源接口充电指示灯充电中亮红色 ,充满电后亮绿色 ,未充电时熄灭,使用USB口进行机体Hub充电充电指示灯蓝牙指示灯蓝牙指示灯亮蓝色 ,机体Hub与应用APP连接成功开机指示灯开机指示灯亮绿色 ,X-KIT Hub处于可运行状态信号灯说明无论机体Hub是否开机,USB连接后,均自动充电;若希望缩短充电时长,建议在机体Hub关机状态下进行充电。
当使用PC连接有线传输程序时,需在机体Hub开机状态下方可进行。
温馨提示:避免安装错误导致程序无法正确运行!RGB灯电机红外传感器(IR Sensor)电子模块安装通过程序控制RGB数值输出不同颜色的灯光红外传感器能够识别出黑色物体,检测范围1-2cm可以顺时针或逆时针方向转动,用于车轮驱动USB数据:USB接口为充电口,USB线接入通电即开始充电使用USB口进行有限数据传输,确保机体Hub处于开机状态电源充电线可同时作为数据传输线使用没有充电充电状态:充电中已充满舵机套件包含4个数字舵机,默认初始位置为90°,转动范围为0~180°,可以让模型的结构件实现不同角度的转动。
《机器人3D仿真系统》使用教程机器人3D仿真系统是一款用来模拟和演示机器人工作过程的软件。
它提供了一个虚拟环境,在这个环境中可以拖放机器人模型、设置其行为并观察其操作。
本教程将介绍如何使用这款软件。
第一步,安装软件第二步,启动软件安装完成后,在桌面上可以看到机器人3D仿真系统的快捷方式。
点击快捷方式,软件将会启动。
启动后,你将看到一个虚拟环境的界面。
第三步,导入机器人模型在左侧的面板中,你可以找到一个机器人模型的库。
点击该库,会显示可用的机器人模型列表。
你可以选择一个模型并拖放到虚拟环境中。
第四步,设置机器人行为选择机器人模型后,在右侧的属性面板中可以对机器人进行设置。
你可以选择机器人的起始位置、速度、行走路径等等。
你还可以为机器人添加传感器,以便能够检测环境的变化。
第五步,运行仿真设置机器人行为后,你可以点击软件界面右上角的“运行”按钮来开始运行仿真。
在仿真过程中,你可以观察机器人的行为并进行调试。
如果需要,你可以暂停、继续或重置仿真。
第六步,观察结果当仿真结束后,你可以观察仿真结果。
你可以观察机器人在虚拟环境中的移动轨迹、传感器的变化以及其他相关信息。
如果需要,你还可以保存结果以供后续分析和演示。
第七步,修改设置如果你对仿真结果不满意,你可以随时调整机器人的设置并重新运行仿真。
你可以修改机器人的行为、起始位置,或者修改虚拟环境中的参数等等。
总结:《机器人3D仿真系统》是一款功能强大的软件,可以帮助用户模拟和演示机器人工作过程。
通过这款软件,用户可以自由地设置机器人的行为并观察其操作。
本教程介绍了软件的安装、启动、导入机器人模型、设置机器人行为、运行仿真、观察结果以及修改设置等基本操作。
希望本教程能够帮助你更好地使用《机器人3D仿真系统》。
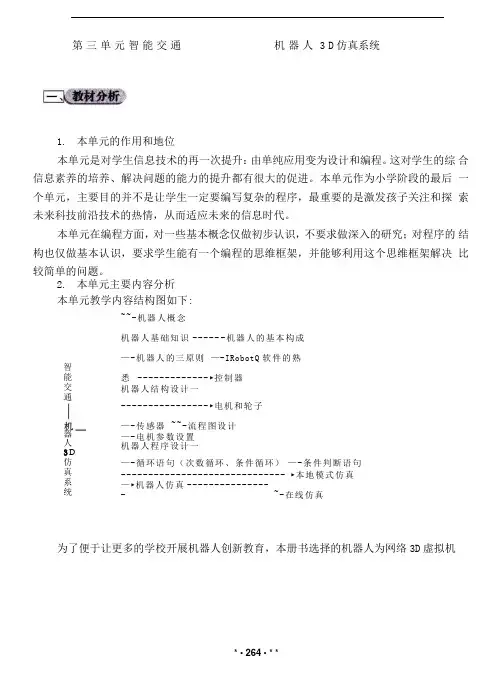
* • 264 • * * 智能交 通 器人 3D仿真系统 第三单元智能交通机器人3D 仿真系统1. 本单元的作用和地位本单元是对学生信息技术的再一次提升:由单纯应用变为设计和编程。
这对学生的综 合信息素养的培养、解决问题的能力的提升都有很大的促进。
本单元作为小学阶段的最后 一个单元,主要目的并不是让学生一定要编写复杂的程序,最重要的是激发孩子关注和探 索未来科技前沿技术的热情,从而适应未来的信息时代。
本单元在编程方面,对一些基本概念仅做初步认识,不要求做深入的研究;对程序的 结构也仅做基本认识,要求学生能有一个编程的思维框架,并能够利用这个思维框架解决 比较简单的问题。
2. 本单元主要内容分析本单元教学内容结构图如下:~~-机器人概念机器人基础知识 ----- -机器人的基本构成—-机器人的三原则 —-IRobotQ 软件的熟悉 ------------- ►控制器 机器人结构设计一---------------- ►电机和轮子—-传感器 ~~-流程图设计 —-电机参数设置 机器人程序设计一 —-循环语句(次数循环、条件循环) —-条件判断语句 ------------------------------ ►本地模式仿真 —►机器人仿真 ---------------- ~-在线仿真为了便于让更多的学校开展机器人创新教育,本册书选择的机器人为网络3D 虚拟机器人仿真系统,该软件分为服务器端和客户端,客户端下载地址为:,在主页的“3D仿真系统下载”一栏内进行下载。
下载完成之后,按照下面的操作进行:1.双击安装文件,点击下一步,选择“接受许可协议”,然后再点击下一步,此时系统会自动检测是否符合安装环境。
如下图:被_系线必备瑰軎|娜_当前臟麟已经存在本软件运行縐嬰的运正在棚|文是雜狭…e s正在猃雜―x f t g安装…e s系祕备獅B安親縦下一步#如果相应的软件环境没有安装,请先下载相关软件安装后再安装客户端。
ROBOGUIDE仿真说明手册1.ROBOGUIDE简介 (2)2.简单工作环境的建立 (3)3.仿真环境下的基本操作 (9)鼠标基本操作 (9)机器人属性 (9)三维数模的载入 (10)机器人手抓的载入 (11)机器人DRESSOUT的添加 (13)附加轴的添加 (18)工具条常用功能简介 (23)提高ROBOGUIDE运行速度的方法 (25)4.经验总结 (26)1.ROBOGUIDE简介图1ROBOGUIDE是发那科机器人公司提供的一个离线编程工具,它是围绕一个离线的三维世界进行模拟,在这个三维世界中模拟现实中的机器人和周边设备的布局,通过其中的TP示教,进一步来模拟它的运动轨迹。
通过这样的模拟可以验证方案的可行性同时获得准确的周期时间。
ROBOGUIDE是一款核心应用软件,具体的还包括搬运、弧焊、喷涂等其他模块。
ROBOGUIDE的仿真环境界面是传统的WINDOWS界面,由菜单栏,工具栏,状态栏等组成。
2.简单工作环境的建立1).打开BOGUIDE后单击工具栏上的新建按钮,建立一个新的工作环境,出现如图2所示界面。
图22).在图2这个界面下选择你所需要进行的仿真,这里包括搬运,弧焊等(根据安装软件的不同这里的可选项目不同,具体安装可以浏览安装光盘里的记事本说明文件),确定后单击Next进入下一个选择步骤,如图3.图3 3).在图3这个界面下你需要确定仿真的命名,即在Name中输入仿真的名字(中英文均可),也可以用默认的命名。
命名完成后单击Next进入下一个选择步骤,如图4。
图44).在图4这个界面下是选择一个创建机器人的方式,选择第一个创建一个新的机器人,然后单击Next进入下一个选择界面,如图5。
图55).在图5这个界面下选择一个安装在机器人上的软件版本(版本越高功能越多),然后单击Next进入下一个选择界面,如图6。
图66).在图6这个界面下选择仿真所需要的工具,如点焊工具,弧焊工具,搬运工具,根据仿真的需要选择合适的工具,然后单击Next进入下一个选择界面,如图7。
纳英特机器人3D 仿真系统用户手册V1.2杭州纳英特电脑电子工程有限公司目录1. 软件简介 (3)2. 软件的安装 (5)2.1. 安装中的其他问题 (6)2.2. 关于D IRECT X (6)2.3. 卸载 (7)3. 软件界面 (8)3.1. 系统主菜单 (8)3.2. 快速启动 (9)3.3. 进入仿真 (10)3.3.1. 机器人组队设置 (10)3.3.2. 控制程序的编辑 (11)3.3.3. 机器人场地合成 (11)3.3.4. 仿真运行 (11)3.4. 机器人搭建 (14)3.4.1. 基本操作 (15)3.5. 场地编辑 (16)3.5.1. 界面说明 (16)3.5.2. 场地属性设置 (17)3.6. 灰度传感器属性设置 (18)3.7. 红外传感器属性设置 (18)3.8. 指南针属性设置 (18)3.9. 马达属性设置 (18)4. 程序编辑器的使用 (19)4.1. 基本操作 (19)4.2. 模块说明 (20)4.2.1. 执行器模块库 (20)4.2.2. 程序模块库 (26)5. 技术支持 (30)1. 软件简介NSTRSS 是NST 科技新近推出的一款以.NET 平台为基础,使用Microsoft DirectX9.0 技术的3D 机器人仿真软件。
用户通过构建虚拟机器人、虚拟环境,编写虚拟机器人的驱动程序,模拟现实情况下机器人在特定环境中的运行情况。
NSTRSS 与市面上的同类产品相比,它具有如下的特点:1.全3D 场景。
用户可自由控制视角的位置,角度,甚至以第一人称方式进行场景漫游。
2.逼真的仿真效果。
采用虚拟现实技术,高度接近实际环境下的机器人运动状态,大大简化实际机器人调试过程。
3.实时运行调试。
运行时,依据实际运行情况,调整机器人参数,帮助用户快速实现理想中的效果。
4.自由灵活的机器人搭建与场地搭建。
用户可自由选择机器人及其配件,进行机器人搭建,可自行编辑3D 训练比赛场地,所想即所得。
Bin-picking robot system—Application of 3D vision system PrefaceAt present, in machining processes for machine parts, loading of workpieces into the machine tools, transfer between processes, and other workpiece transfer operations between machining processes are often still dependent on manual labor. If this mechanical parts picking and transfer between machining processes were to be automated using robot systems, it could make the machining process layout and flow more flexible, and increase the rate of line automation as a whole.In the materials processing production site, automation has been slow in coming for the workpiece bin-picking operations where workpieces are randomly placed in container boxes and other large part boxes. In particular, picking of forged parts, machine parts, and other heavy workpieces is a monotonous, repetitious operation that is a classic example of an unpleasant 3D (dirty, dangerous, and demanding) working environment. As a result, there is much demand for automation, and introduction of robot systems is eagerly awaited. In addition, if special equipment for arranging parts is used, such operations would not be able to handle multiple parts types, so a practical general-use industrial robot is needed. Furthermore, introduction of such a robot system necessitates development of vision technology to enable identification of complex workpieces in bulk.At Kawasaki, we have various vision systems using stereo vision sensors and 3D laser sensors, etc., that are available as products for various robot applications in welding, assembly, inspections, and transport, etc. For automation of workpiece bin-picking targeting forged parts, we have developed, based on our vision technology, a 3D vision sensor, a bulk workpiece recognition method, an online interference simulator, and a module controller for integrated control of various functions, and placed a robot system on the market that is capable of stable picking of random workpieces (Fig. 1).Operations for loading workpieces onto machine toolsand handling workpieces between processes are important towards building a manufacturing line. In particular, the operations for picking workpieces in bulk need to be automated.This paper describes a bin-picking robot system as a case of application of a 3D vision sensor developed by us.Laser lightHandRobot3D vision sensorWorkpieces in bulkFig. 1 Bin-picking robot system1 Development issues and solutions (1) Development issuesIn ordinary picking operations, the method for recognizing workpiece positions and postures involves the use of cameras trained on workpieces laid out on a conveyor or other flat surfaces to perform 2D grayscale image processing. However, this method is limited in the range of picking automation applications, in that it requires workpieces to be arrayed in specified positions on the flat surface, or in a specified order, etc. For cases where bulk workpieces are randomly placed in container boxes, etc., bin-picking robot systems need to be able to recognize the 3D position and posture of each workpiece, and determine the workpiece to be picked. The main issues for automation of bin-picking operations are as follows.①W ith diverse 3D positions and postures in randomlypacked workpieces, individual workpieces are difficult to recognize against a background of piled-up workpieces.②D uring workpiece picking operations, the robot or handcollides with surrounding workpieces or the container box.③D epending on the workpiece position or posture, someworkpieces may be left behind within the container box. (2) SolutionsAs solutions to these issues, we have developed the following:①A vision system capable of discerning changes in thesurrounding lighting environment and the workpiece surface condition, and a stable bulk workpiece recognition method.②F unction for judging and avoiding potential collisionswith surrounding workpieces.③H and mechanism with diverse gripping patterns thatkeep residual workpieces to a minimum.2 D evelopment of bin-picking robot system(1) Equipment configurationThe bin-picking robot system consists of a 3D vision sensor for recognizing bulk workpieces, an articulated robot for performing the picking operation, an electromagnetic hand for performing the grasping operation, and a module controller for performing integrated control of various equipment and operations sequences, etc. The equipment configuration is shown in Fig. 2.3D vision sensorModule controllerElectromagnetic handArticulated robotFig. 2 System configuration of bin-picking system(2) 3D vision system( i ) Laser Slit Scan Camera (LSC)For the 3D sensing function for automation of bulk workpiece picking, we used a method for processing range images expressing height information in grayscale values. In this system, we used an active method projecting semiconductor laser slit light to obtain a range image that, unlike stereo cameras and other passive methods, enables height information to be obtained for edges and targets on patternless flat surfaces or curved surfaces. In addition, it can ensure stable imaging even with changes in the ambient light or reflection rates on the workpiece surface. For this product, we developed the 3D vision sensor Laser Slit Scan Camera (LSC) with a motor that drives a mirror to scan the laser slit light and obtain a range image. The LSC can measure the wide range of a large container box (W800×D800×H600 mm) with a single scan. An external view of the LSC is shown in Fig. 3, and specifications in Table 1.(ii) Bulk workpiece recognition methodWe have developed a bulk workpiece recognition method targeting cylindrical-shaped forged parts. In this recognition method, the workpiece targeted for gripping ispicked(a) Forged parts workpiece(b) Image of region partitioning processFig. 4 Images of bulk workpiece processing (c) Range image and result of grip target workpiece detectionFig. 3 Laser Slit Scan Camera(LSC)Table 1 Specifications of LSCbased on a range image captured with the 3D vision sensor, enabling calculation of the 3D positioning and posture. In addition, we eliminated the need for a template image model used in normal image recognition processes, enabling recognition of diverse workpiece postures.The bulk workpiece recognition procedure is as shown below.① Edge detection and partitioning processT he edges of each workpiece are detected from the range image, and region partitioning process is performed. An external view of forged material workpieces is shown in Fig. 4(a), and an image after region partitioning process is shown in Fig. 4(b).② Feature quantity calculationA fter the region partitioning process, labeling isperformed for each sub-region, and feature quantities are calculated for the height, area center, surface curvature, and area, etc., of each extracted sub-region.③ Detection of workpiece targeted for grippingT he workpiece targeted for gripping is determined from the sub-region extracted using the region partitioning process, and the 3D coordinates of the gripping position, and the workpiece tilt and rotation angles arecalculated. The range image, and detection results for a workpiece targeted for gripping, are shown in Fig. 4(c).(3) Online interference simulatorIn previous bin-picking robot systems, when the robot approached the workpiece targeted for gripping, it would occasionally collide with workpieces surrounding the target workpiece or with the container box, causing the system to stop. To solve this problem and enable stable picking operations, we applied the interference check function of the Kawasaki robot simulator to develop an online interference simulator. The online interference simulator has the following features:①U ses 3D measurement data obtained with the LSC toenable detection of robot collisions before performing the approach operation.②E valuates 3D positions and postures of workpieces,and the robot posture, to determine the most efficient priority sequence for workpieces targeted for gripping.③D etermines the robot posture for the shortest robotoperation time.Operations screens for the online interference simulator are shown in Fig. 5.3D measurement dataRobot armPallet-shaped data Fig. 5 Online interference simulator screen(4) Module controllerWe have developed a module controller for integrated control of the various functions in the bin-picking robot system. The module controller is the core of the robot system, and is standardized for construction of mass production-type robot systems for integrated control of the 3D vision system, online interference simulator, operations sequence, hand mechanism, and various sensors, etc. In addition, we provide a library based on a universal language (C# language) that enables easy customization for each customer, and reduces the robot system development time. The module controller system configuration is shown in Fig. 6.(5) Electromagnetic handNormally, if cylindrical-shaped workpieces are loaded in bulk inside container boxes, workpieces near the walls of the container box are not picked until the very last, and sometimes get left behind without being picked. To resolve this problem, we developed an electromagnetic hand with multiple gripping patterns for the same workpiece targeted for gripping, minimizing the problem of residual workpieces. In addition, we used the online interference simulator to perform simulations of multiple gripping patterns, in order to automatically calculate approach operations that avoid hand collisions and enable picking of bulk workpieces. Views of the electromagnetic hand and its gripping patterns are shown in Fig. 7, and approach operation examples are shown in Fig. 8.(a) Normal grip (b) Front edge grip (e) Forward and back shift(c) Bottom surface gripFig. 7 Views of electromagnet handFig. 8 Approach operation of electromagnet handFig. 6 System configuration of module controller(a) Normal grip (b) Front edge grip (c) Bottom surface gripProfessional Engineer (Mechanical Engineering)Masahiko AkamatsuProduction Control Department,Production Center,Plant & Infrastructure CompanyTakeshi YamamotoControl System Department,System Technology Development Center,Corporate Technology DivisionAtsushi YokooControl System Department,System Technology Development Center,Corporate Technology DivisionToru NunomeControl System Department,System Technology Development Center,Corporate Technology DivisionDaisuke KawakamiElectromechanical System Department,System Technology Development Center,Corporate Technology DivisionProfessional Engineer (Electrical & Electronics Engineering)Masayuki EnomotoControl System Department,System Technology Development Center,Corporate Technology DivisionShogo HasegawaFA System Department,FA and Clean Group,Robot Division,Precision Machinery CompanyKatsuya MiuraFA System Department,FA and Clean Group,Robot Division,Precision Machinery CompanyYutaka TakemotoSales Department 2,Sales and Service Group,Robot Division,Precision Machinery Company3 Application exampleWe introduced a bin-picking robot system to a forged partsmanufacturing line. This system can perform stablerecognition of workpieces even with oxidized scaling orrusting of surfaces of forged part workpieces. In addition,the robot can continuously pick workpieces withoutcolliding with surrounding workpieces or with the containerbox. The bin-picking system for forged parts isshown inFig. 9.Concluding remarksKawasaki has developed a 3D vision sensor, a bulkworkpiece recognition method, and an online interferencesimulator based on our vision technology, to achieve a bin-picking robot system for practical application and placed iton the market. In the future, as a robot application using3D vision sensors, we plan to engage in robot systemdevelopment that moves beyond the handling sector toinclude the assembly and inspection, etc., of precisionmachine parts and electrical machine parts, which currentlydepend on manual labor because of the difficulty ofautomation.Fig. 9 Bin-picking system for forged part。
ROBOGUIDE仿真说明手册V1、01、ROBOGUIDE简介图1ROBOGUIDE就是发那科机器人公司提供得一个离线编程工具,它就是围绕一个离线得三维世界进行模拟,在这个三维世界中模拟现实中得机器人与周边设备得布局,通过其中得TP示教,进一步来模拟它得运动轨迹。
通过这样得模拟可以验证方案得可行性同时获得准确得周期时间。
ROBOGUIDE就是一款核心应用软件,具体得还包括搬运、弧焊、喷涂等其她模块。
ROBOGUIDE得仿真环境界面就是传统得WINDOWS 界面,由菜单栏,工具栏,状态栏等组成。
2、简单工作环境得建立1、打开BOGUIDE后单击工具栏上得新建按钮,建立一个新得工作环境,出现如图2所示界面。
图22、在图2这个界面下选择您所需要进行得仿真,这里包括搬运,弧焊等(根据安装软件得不同这里得可选项目不同,具体安装可以浏览安装光盘里得记事本说明文件),确定后单击Next进入下一个选择步骤,如图3、图33、在图3这个界面下您需要确定仿真得命名,即在Name中输入仿真得名字,也可以用默认得命名。
命名完成后单击Next进入下一个选择步骤,如图4。
图44、在图4这个界面下就是选择一个创建机器人得方式,我们选择第一个创建一个新得机器人,然后单击Next进入下一个选择界面,如图5。
图55、在图5这个界面下选择一个安装在机器人上得软件版本(版本越高功能越多),然后单击Next进入下一个选择界面,如图6。
图66、在图6这个界面下选择仿真所需要得工具,如点焊工具,弧焊工具,搬运工具,根据仿真得需要选择合适得工具,然后单击Next进入下一个选择界面,如图7。
图77、在图7这个界面下需要选择仿真所用得机器人,这里几乎包含了所有得机器人类型,然后单击Next进入下一个选择界面,如图8。
图88、在图8这个界面下当您现场需要多台机器人时,可以在这里继续添加,然后单击Next进入下一个选择界面,如图9。
图99、在图9这个界面下可以选择各类其她软件,将它们用于仿真,这里包括许多常用得附加软件如2D、3D视觉应用与附加轴等都可以在这里添加,同时您可以切换到Languages选项卡里设置语言环境,默认得就是英语。
机器人模型建立与仿真的说明书一、引言机器人模型建立与仿真是一项重要的技术工作,旨在通过虚拟仿真环境对机器人进行测试、验证与优化,以提高其性能和效能。
二、概述1. 目标本说明书旨在提供机器人模型建立与仿真的详细过程和方法,以便用户能够准确理解和使用。
2. 适用范围本说明书适用于机器人模型建立与仿真工程师、科研人员、教育机构以及对机器人开发和应用感兴趣的相关从业人员。
三、材料准备1. 计算机硬件要求- 完整的计算机系统,包括电脑主机、显示器、键盘和鼠标等- 高性能显卡和足够的内存空间,以保证模型仿真的流畅运行2. 软件安装- 机器人建模软件,如SolidWorks、Autodesk Inventor或CATIA等- 三维仿真软件,如MATLAB、Simulink或ROS等3. 数据收集与准备- 机器人的构造和功能需求- 相关传感器、执行器以及其他组件的技术规格和性能参数- 仿真环境的设置和预期结果四、机器人模型建立1. 确定机器人类型与结构- 根据实际需求,选择合适的机器人类型,如人形机器人、轮式机器人或多足机器人等- 设计机器人的结构和外形,考虑到稳定性、坚固性以及实际应用场景的要求2. 进行机器人建模- 使用选定的机器人建模软件进行机器人模型的创建- 根据机器人结构和设计要求,依次添加机器人的各个组件和连接件- 为机器人模型设置材质、外观和颜色等属性,以提高真实感3. 验证机器人模型- 检查机器人模型的尺寸和比例是否与实际机器人相符合- 对机器人模型进行运动学和动力学仿真,验证其动作和功能的准确性- 进行模拟环境下的碰撞检测和避障等特性测试五、机器人仿真1. 搭建仿真环境- 在选定的仿真软件中创建仿真场景,包括地图、障碍物、目标点等- 为仿真环境设置物理参数,如重力、摩擦力等,以使仿真更加真实可信2. 设定仿真参数- 配置仿真所需的输入参数,包括机器人的初始位置、速度、传感器参数等- 确定仿真的时间步长和仿真周期,以及仿真结束的条件3. 进行机器人仿真- 将机器人模型导入到仿真环境中,并与仿真参数进行关联- 开始仿真,并观察机器人在不同场景下的运动和反应- 收集仿真结果数据,进行后续分析和优化六、实践操作1. 根据上述步骤,依次进行机器人模型建立和仿真操作2. 注意记录和保存每个步骤的结果和数据,以备后续分析和改进使用七、结果分析与优化1. 分析仿真结果- 对仿真过程和结果进行客观评估,检验机器人的性能和功能是否满足预期要求- 分析仿真数据,如机器人的路径规划、感知能力等,以提供改进策略和建议2. 优化机器人设计- 根据仿真结果和分析所得,对机器人模型进行适当的修改和优化- 调整机器人的参数设置,以提升机器人的性能和效能八、结论本说明书详细介绍了机器人模型建立与仿真的过程和方法,通过准确的机器人建模和真实的仿真环境,可以对机器人的性能和功能进行评估和优化,以满足实际应用的需求。
萝卜圈三维机器人在线仿真软件 V1.0萝卜圈三维机器人在线仿真平台软件用户手册目录1. 运行环境 (1)1.1运行 (1)1.2控制 (1)2. 使用说明 (2)2.2 登录信息 (2)2.2.1登录信息 (2)2.2.1.1登录 (2)2.2.1.2登录离线模式页面 (3)2.2.1.3登陆在线模式页面 (3)2.3 离线模式 (4)2.3.1构建场景 (5)2.3.1.1模型库 (5)2.3.1.2操作功能 (5)2.3.2搭建机器人 (7)2.3.2.1机器人模型库 (7)2.3.2.1搭建机器人 (7)2.3.2.2机器人参数设置 (9)2.3.3编写控制程序 (9)2.3.3.1可视编程模型库 (11)2.3.3.1编写程序操作 (11)2.3.4仿真运行 (13)2.3.5资源管理 (14)2.4在线模式 (16)2.4.1完成在线任务 (17)1. 运行环境1.1 运行硬件:PC机,1G以上CPU,1G及以上内存,128M 3D显卡软件:Windows XP,Windows Vista,Windows 7,Windows Server 2003,Windows Server 2008,.Net Framework v2.0.50727,DirectX9.0c。
1.2 控制本系统采用图形界面,控制方式以鼠标为主,键盘为辅。
2. 使用说明2.2 登录信息本登录基本信息模块含登录、注册、忘记密码3个基本信息子模块。
2.2.1登录信息2.2.1.1登录在程序菜单中运行“IROBOTQ 3D 机器人在线仿真平台”进入登陆界面,登陆界面如下:图2-2-1-1-1 登录信息页面【注】1) 用户登录时填写的用户名和密码及服务器地址其中一项不相符,会提示用户登录失败。
2) 登录时需要填写或选择服务器的IP地址3) 如果用户多次尝试多个密码,或者已经忘记密码,则转到忘记密码页面,取回密码,重新登录。
2.2.1.2登录离线模式页面选择“离线模式”并点击登陆界面<GO>按钮,进入离线模式主界面,如下图所示:图2-2-1-2-1 登录离线模式页面2.2.1.3登陆在线模式页面选择“在线模式”并点击登陆界面“GO”按钮,进入在线模式主界面,如下图所示:图2-2-1-3-1 在线模式主界面2.3 离线模式以离线模式登陆后,主界面包括构建场景、搭建机器人、编写控制程序、资源管理、开始仿真、在线切换、退出6个基本子模块。
3B SCIENTIFIC ® PHYSICS1Motore Stirling G 1002594Istruzioni per l'uso10/23 ALF/UD1 Volano con marcaturaper determinare il numero di giri2 Unità motore-generatorecon puleggia a due stadi 3 Interruttore 4 Lampadina5 Jack di sicurezza da 4mm6 Bruciatore ad alcol7 Prese di misura dellatemperatura 18 Pistone di compressione 9 Attacco del tubo contappo per la misurazione della pressione10 Prese di misura dellatemperatura 2 11 Pistone di lavoro 12 Asta filettata M3(collegata al pistone di lavoro)1. Norme di sicurezzaRiempire con attenzione il bruciatore ad alcol con alcol da ardere, in modo tale che non fuoriesca.Non riempire il bruciatore ad alcol se lostoppino sta ancora bruciando o se nelle vicinanze è presente un’altra fiamma aperta. Dopo l’uso chiudere immediatamente ilflacone di alcol.Non avvicinare le mani alla fiamma aperta. Attenzione! Spegnere la fiamma solo con ilcoperchio fissato.Il motore Stirling si riscalda durante il funzionamento con fiamma aperta.Non toccare il cilindro di compressionedurante e al termine del funzionamento del motore Stirling.Lasciare raffreddare il motore prima dirimuoverlo.2. DescrizioneIl motore Stirling permette l’analisi qualitativa e quantitativa del ciclo di Stirling. Può essere utilizzato in tre modalità diverse: motore termico, pompa di calore o macchina frigorifera.Il cilindro e il pistone di compressione sono realizzati in vetro resistente alle alte temperature; il cilindro di lavoro, il volano e le protezioni del cambio sono invece in vetro acrilico. In questo modo è possibile osservare molto bene i singoli movimenti in qualsiasi momento. Gli alberi a gomiti hanno cuscinetti a sfera e sono realizzati in acciaio temprato. Le bielle sono di plasticaresistente all’usura.L’unità motore-generatore incorporata, dotata di puleggia a due stadi consente di trasformare l’energia meccanica generata in energia elettrica. Con possibilità di commutazione per l’azionamento di una lampada incorporata o di carichi esterni, oppure per alimentare energia elettrica per il funzionamento in qualità di pompa di calore o macchina frigorifera.Fissando il filo in dotazione all'asta filettata del pistone di lavoro, è possibile misurarne la corsa.23. Dati tecniciUnità motore-generatore: max. 12 V CC Puleggia a due stadi: 30 mm Ø, 19 mm Ø Pistone di lavoro: 25 mm Ø Corsa pistone di lavoro: 24 mm Variazione del volume:24 mm 325mm 12cm 2Volume minimo: 32 cm³ Volume massimo: 44 cm³Potenza del motore Stirling: ca. 1 WDimensioni: ca. 300x220x160 mm³ Peso: ca. 1,65 kg4. Schema di funzionamentoIl ciclo Stirling ideale avviene in 4 fasi:1a fase: fase di espansione: cambiamento distato isotermico, l’aria si espande a temperatura costante2a fase: cambiamento di stato isocorico, l’ariasi raf fredda a volume costante nel rigeneratore3a fase: fase di compressione: cambiamentodi stato isotermico, l’aria viene compressa in modo isotermico4a fase: cambiamento di stato isocorico, l’ariaviene di nuovo riscaldata alla temperatura origina ria nel rigeneratoreNel motore Stirling, questo processo ideale è realizzato solo in maniera approssimativa, perché i quattro tempi si sovrappongono. Il gas passa da caldo a freddo già durante la fase di espansione e durante la fase di compressione l’aria non si trova ancora tutta nella parte fredda del motore.Fig. 1 Schema di funzionamento(A: Pistone di compressione, B: Pistone di lavoro)5. Utilizzo5.1 Il motore Stirling come motore termico Riempire il bruciatore ad alcool, inserirlonell’incavo della piastra di base, estrarre svitando lo stoppino di circa 1-2 mm e accenderlo.Portare i pistoni di compressione nellaposizioni più arretrata e dopo un breve periodo di riscaldamento (da 1 a 2 minuti circa) mettere in movimento il volano con una leggera pressione in senso orario (sguardo rivolto verso l'unità motore-generatore) (vedere fig. 2).Se necessario, impostare la tensione dellacinghia di trasmissione spostando l'unità motore-generatore. Accendere la lampadina spostandol'interruttore nella posizione “sopra”.In alternativa collegare il carico esternotramite le prese da 4 mm e mettere in funzione con l’interruttore in posizione "sotto".Numero di giri senza carico: ca. 1000 giri/min Numero di giri congeneratore come carico: ca. 650 giri/min Tensione generatore: ca. 6 V CC Scarto di pressione: +250 hPa/-150 hPa5.2 Il motore Stirling come pompa di calore omacchina frigoriferaDotazione supplementare necessaria:1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 230 V1003312oppure1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 115 V1003311Termometro digitale 1002794 Inserire i sensori di temperatura nelle presedi misura della temperatura e collegarli ad un misuratore (vedere fig. 3).Collegare la sorgente di corrente continuatramite le prese da 4 mm.Impostare al massimo 12 V e azionare ilmotore di Stirling con l'interruttore in posizione "sotto".Osservare l’aumento o la diminuzione ditemperatura.In modalità di funzionamento macchina frigorifera il volano ruota in senso orario (sguardo rivolto verso l'unità motore-generatore), in modalità pompa di calore in senso antiorario.Per cambiare la modalità difunzionamentoinvertire la polarità dei cavi di collegamento.3Scarto di pressione: +250 hPa/-150 hPa Tensione motore: 9 V Numero di giri: 600 giri/minDifferenza di temperatura (riferita a 21° C): Macchina frigorifera: -4 K (serbatoio: +6 K) Pompa di calore: +13 K (serbatoio: -1 K)5.3 Registrazione del diagramma pressione-volume del motore Stirling come pompa di caloreDotazione supplementare necessaria:1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 230 V1003312oppure1 Alimentatore CC, 0 - 20 V, 0 - 5 A @ 115 V10033111 Portasensori per motore Stirling G 1008500 1 Sensore di pressione relativa ±1000 hPa 1021533 1 Rilevatore di corsa FW 10215342 Cavos del sensore 1021514 1 Data logger 1 SoftwareUlteriori informazioni sulla misurazione digitale sono disponibili sul sito web del prodotto, nel webshop 3B.Fissare il portasensori alla piastra di base delmotore Stirling.Nel portasensori, montare il sensore dipressione relativa in basso e il rilevatore di corsa in alto in modo tale che il lato stampato sia rivolto verso l’alto.Collegare l’attacco del tubo “+” del sensore di pressione relativa e l’attacco tubo sul cilindro di lavoro del motore Stirling per mezzo del tubo flessibile fornito in dotazione con il portasensori (1008500).Avvitare il dado cieco fissato al filo (compreso nella dotazione del portasensori) sull’asta filettata del pistone di lavoro, passare il filo intorno alla puleggia del rilevatore di corsa e appendere la molla ad elica all’asta filettata. (Per una descrizione dettagliata relativa al montaggio dei sensori sul portasensori vedere le istruzioni per l’uso del portasensori 1008500.)Collegare il sensore di pressione relativa e il rilevatore di corsa al data logger.Collegare la sorgente di corrente continua tramite le prese da 4 mm.Impostare al massimo 12 V e azionare il motore di Stirling con l'interruttore in posizione "sotto".Avviare il software e registrare il diagramma pressione-volume.Fig.2Il motore Stirling come motore termico3B Scientific GmbH Ludwig-Erhard-Straße 20 20459 Amburgo • Germania • Con riserva di modifiche tecniche © Copyright 2023 3B Scientific GmbHFig. 3 Il motore Stirling come pompa di calore o macchina frigoriferaFig. 4 Registrazione del diagramma pressione-volume。
纳英特机器人3D 仿真系统用户手册V1.2杭州纳英特电脑电子工程有限公司目录1. 软件简介 (3)2. 软件的安装 (5)2.1. 安装中的其他问题 (6)2.2. 关于D IRECT X (6)2.3. 卸载 (7)3. 软件界面 (8)3.1. 系统主菜单 (8)3.2. 快速启动 (9)3.3. 进入仿真 (10)3.3.1. 机器人组队设置 (10)3.3.2. 控制程序的编辑 (11)3.3.3. 机器人场地合成 (11)3.3.4. 仿真运行 (11)3.4. 机器人搭建 (14)3.4.1. 基本操作 (15)3.5. 场地编辑 (16)3.5.1. 界面说明 (16)3.5.2. 场地属性设置 (17)3.6. 灰度传感器属性设置 (18)3.7. 红外传感器属性设置 (18)3.8. 指南针属性设置 (18)3.9. 马达属性设置 (18)4. 程序编辑器的使用 (19)4.1. 基本操作 (19)4.2. 模块说明 (20)4.2.1. 执行器模块库 (20)4.2.2. 程序模块库 (26)5. 技术支持 (30)1. 软件简介NSTRSS 是NST 科技新近推出的一款以.NET 平台为基础,使用Microsoft DirectX9.0 技术的3D 机器人仿真软件。
用户通过构建虚拟机器人、虚拟环境,编写虚拟机器人的驱动程序,模拟现实情况下机器人在特定环境中的运行情况。
NSTRSS 与市面上的同类产品相比,它具有如下的特点:1.全3D 场景。
用户可自由控制视角的位置,角度,甚至以第一人称方式进行场景漫游。
2.逼真的仿真效果。
采用虚拟现实技术,高度接近实际环境下的机器人运动状态,大大简化实际机器人调试过程。
3.实时运行调试。
运行时,依据实际运行情况,调整机器人参数,帮助用户快速实现理想中的效果。
4.自由灵活的机器人搭建与场地搭建。
用户可自由选择机器人及其配件,进行机器人搭建,可自行编辑3D 训练比赛场地,所想即所得。
5.单人或多人的对抗过程。
用户可添加多个机器人,自由组队进行队伍间对抗。
6.与NSTRobot 无缝连接。
NSTRobot 生成的控制程序代码可有NSTRSS 直接调用,大大节省编程时间。
NSTRSS 带您进入全新的3D 仿真世界,自由无限,创意无限。
系统配置要求操作系统:win98,win2000 全系列,winXp,w i n2003 server运行环境:.Net Framework v1.1,DirectX 9.0c最低硬件配置:600MHz 以上主频的CPU,128M 内存,8M 显存以上的3D 显卡.支持1024×768 分辨率,16bit 颜色的监视器,声卡推荐配置:1G 以上主频的CPU,256M 内存,64M 显存的3D 显卡,支持1024×768 分辨率,16bit 颜色,75Hz 刷新率的监视器,声卡2. 软件的安装1) 如果当前计算机未安装.NetFrameWork v1.1 安装程序将提示“当前计算机未安装.netframework v1.1 ,安装程序将进行.net framework v1.1 的安装!”,点击确定将开始.netFrameWork 的安装。
(用户也可以手动安装,安装文件为dotnetfx.exe,langpack.exe 为中文语言包。
),如上图。
安装过程中,如果病毒防火墙处于开启状态,可能会有如下的提示(以瑞星为例),请选择“同意修改”。
“下一步”,同意许可协议。
安装完毕后,继续进行仿真系统的安装。
选择安装路径,默认安装于系统盘的Program files\NSTRSS 目录,可以通过“浏览”按钮另作选择。
是否在桌面添加快捷图标,建议选中该选项。
继续操作,将进入安装过程.软件安装完毕,可自行选择是否立即运行仿真系统。
点击“完成”按钮,完成整个安装过程。
2.1. 安装中的其他问题安装过程中提示msxml*.dll 不能注册,则安装mdac_typ_2.7_CHS.exe 软件光盘2.2. 关于DirectX本系统运行需要Microsoft DirectX 9.0c 的支持。
WindowsXp 已经默认安装该版本。
其他版本的操作系统可以通过以下方式查看DirectX 的版本信息。
“开始”菜单->“运行”,输入“c:\windows\system32\dxdiag.exe”注:请按照系统实际路径情况做适当修改。
如果成功运行,显示如下:同时,请检查Direct3D 功能是否启用,图示如下:2.3. 卸载执行程序菜单中的“纳英特仿真”下的卸载命令,即可安全的完成软件的卸载。
3. 软件界面3.1. 系统主菜单图示如下:快速启动:通过选择已保存的项目文件,用户可直接、快速的进入仿真。
进入仿真:通过进行相关设置,按照一定的步骤开始新的仿真。
机器人搭建:进行新机器人的搭建或者已存机器人的编辑修改。
场地编辑:进行新仿真场地的搭建或者已存场地的编辑修改。
退出:退出当前系统。
点击可进入本次活动官方网站查看更多信息3.2. 快速启动实现已设定项目的管理,通过选择相应的项目,可直接、快速进入仿真。
界面如下图所示::存放着保存的历史仿真项目。
:打开选择的项目文件。
:将选择的项目所有需要的资源打包成可分发的包文件。
:导入可分发的包文件。
3.3. 进入仿真要进行一场仿真模拟,需要进行以下内容的设置:☒机器人组队设置☒机器人场地合成☒仿真运行3.3.1. 机器人组队设置进行仿真的规则、场地、分组,机器人以及机器人名称、机器人控制程序的设定。
图示如下:其中左侧面板为设置面板,右边面板为内容预览面板。
规则选择:选择比赛规则,如要编辑规则,可使用规则编辑器。
场地选择:选择与项目相适应的比赛场地。
分组:选择比赛队伍名称,将各个队伍加以区别。
名称:编辑机器人名称,作为仿真中的机器人代号,接受中英文、数字。
程序代码:选择程序,作为机器人的控制程序。
该列表内包含“浏览…”,“新建”两个固定项目,其中“浏览…”可打开应用程序安装目录以外的用户程序,执行完该操作,该文件则被被加入到当前程序列表中。
“新建”则调用程序编辑器,新建一个机器人控制程序。
机器人:选择已搭建完成的机器人。
加载:打开保存的历史仿真项目。
下一步:设置完成,进入下一步(机器人场地合成),如果有信息未设置完成,将无法进入下一步,并且会有相应的提示。
3.3.2. 控制程序的编辑在当前操作界面中,可以新建,编辑机器人控制程序。
新建程序:通过点击“程序代码”下拉列表中的“新建”项目,可打开控制程序编辑窗口,进入新程序编辑状态。
编辑程序:在预览状态下,双击预览窗口可打开控制程序编辑器,对当前预览程序进行编辑。
关于控制程序编辑器的具体操作,请参见第四章3.3.3. 机器人场地合成该步骤完成机器人在场地中的初始位置设定,并且可以保存当前的仿真项目,供以后快速启动之用。
进入该界面以后,窗口的左上角将会列出当前所有可用的机器人,点击机器人之后,按照提示,单击鼠标左键确定机器人在场地中的放置位置。
图示如下:(注:如果场地中已经包含了起始点,则系统将自动设置机器人到起始点位置。
)返回:返回到上一步(机器人组队设置)保存:保存当前仿真项目,供快速启动使用。
进入仿真:进入仿真运行界面。
3.3.4. 仿真运行机器人按照预定的设置,在控制程序的控制下完成预定的功能,系统将依据场地、机器人的搭建情况等因素进行较为真实的过程模拟。
图示如下:3.3.4.1. 各控制按钮的说明加载控制程序:在机器人选中的情况下(如何选中机器人,请参看3.3.4.2),可变更当前的控制程序。
注:如果机器人正在运行中,系统将会有提示用户首先暂停机器人的运行。
开始:默认情况下,当前场景中所有Array的机器人将开始运行。
如果某个机器人被选中,则只会运行选中的机器人,而其他的继续处于停止状态。
同时,计时器开始计时。
停止:默认情况下,当前场景中所有的机器人将停止运行。
如果某个机器人被选中,则只会停止选中的机器人,而其他的继续处于运行状态。
同时,计时器停止计时。
复位:默认情况下,当前场景中所有的机器人的位置,程序等将被重置回初始状态。
如果某个机器人被选中,则只会复位选中的机器人,而其他的继续处于运行状态。
此时,计时器处于停止状态。
俯视:从顶部向下观察整个场景。
正视:从场景正前方观察整个场景。
侧视:从场景的正左方观察整个场景。
选择机器人或其零部件或者场地时,将显示选中物的状态,示例如右图:代码显示:显示当前选中机器人的控制代码以及当前执行的具体语句。
机器人停止运行的状态下,双击代码显示列表可打开程序编辑器。
显示部件本地坐标系:控制各个物体(部件)本地坐标系是否显示。
(注:所谓的本地坐标系是以各物体(部件)的中心点为坐标原点的坐标系统。
)返回主菜单:返回到系统主菜单。
3.3.4.2. 基本操作 选中/取消选中机器人:Ctrl+鼠标左键或鼠标右键点击目标机器人,即可选中机器人,如欲取消,则点击空白处。
(注意,需要选中机器人主体,即主控制盒。
否则无法完成操作。
如右图所示)显示机器人(或者其组成部件)的基本信息: 选中目标机器人,则屏幕左上角将显示该机器人(部件)的基本信息。
调整机器人的基本位置信息: 右键选择目标机器人(如右图所示),设置其属性。
将会打开基本的属性设置窗口。
该窗口可以设置机器人的位置,名称等基本信息。
选择机器人部件的情况下,可以设置部件的相应基本 属性,如其安装的端口,如果是传感器,则可设置检测距离,检测角度,轮子可设置转动速度等等。
图示如下:(以机器人为例子)名称:可修改机器人在仿真中的名字。
上下左右按钮分别可进行前后左右的位置调整,居中按钮可进行机器人的旋转。
X10,x5,x1,x0.1 单选框,可设置位置调制的粒度机器人实时编辑: 在仿真时,通过右键“编辑”快捷菜单,可切换到机器人编辑界面,对选中的机器人进行编辑。
场地实时编辑:在仿真时,通过右键“编辑”快捷菜单,可切换到场地机器人编辑界面,对场地进行编辑。
3.4. 机器人搭建该模块利用系统提供的各种机器人配件完成机器人从零件到整机的搭建。
本系统采用装配点的思想,快速、准确的实现配件的装配过程。
:选择要搭建的机器人类型:选择新建,则从机器人最原始状态开始搭建;选择其他项目,则对已搭建完成的机器人进行编辑。
:选择需要搭建的部件种类,用以快速查找部件。
主要类型有:传感器,轮子,马达。
:当前机器人组件类型所包含的具体配件。
:用右键选中3D 中的部件,点击可从参数设置从设置部件的位置、方向等各个参数。
:选中现有部件类型列表中的部件,点击可添加此部件到“工作桌面”。
:用右键选中3D 中的部件,点击可删除此部件。
3.4.1. 基本操作通过“添加部件”按钮将选中的配件添加到屏幕(即“工作桌面”)后,鼠标左键选择 当前添加的配件的装配点,再选择装配目的装配点,即可完成操作,具体下所示:☒ 选择当前添加的配件,如:Z 马达,按下鼠标左键拖动,翻转目标,选取其中一个合适的装配点。