新时达机器人操作软件使用说明书-B
- 格式:pdf
- 大小:4.64 MB
- 文档页数:98
STEP机器人操作安全手册-新时达机器人STEP 机器人操作安全手册新时达机器人一、机器人操作前的准备工作1、环境检查在操作新时达机器人之前,必须对工作环境进行全面检查。
确保工作区域整洁,无杂物堆积,地面平整且干燥,以防止滑倒和绊倒事故。
同时,要保证工作区域有足够的照明,以便操作人员能够清晰地看到机器人的动作和周围的情况。
2、机器人检查仔细检查机器人的外观,查看是否有损坏、松动的部件或线缆。
检查机器人的关节运动是否灵活,有无异常噪音或卡顿现象。
确保机器人的控制系统、传感器和执行器等部件正常工作。
3、工具和设备准备根据操作任务的需要,准备好相应的工具和设备,并确保其处于良好的工作状态。
同时,要熟悉这些工具和设备的使用方法和安全注意事项。
4、人员培训所有参与新时达机器人操作的人员,都必须经过专业的培训,了解机器人的工作原理、操作方法和安全规程。
只有通过考核并获得相关资质的人员,才能进行机器人的操作。
二、机器人操作中的安全注意事项1、保持安全距离在机器人运行过程中,操作人员必须与机器人保持足够的安全距离。
严禁靠近正在运动的机器人手臂或其他部件,以免发生碰撞和挤压事故。
2、禁止随意触摸未经授权,任何人不得随意触摸机器人的控制面板、按钮和线缆等部件。
避免因误操作导致机器人失控或发生故障。
3、注意警示标识机器人工作区域通常会设置各种警示标识,如“危险区域”、“禁止入内”等。
操作人员必须严格遵守这些标识的指示,不得擅自进入警示区域。
4、避免多人操作为了避免操作指令混乱,同一时间内只能由一名经过授权的操作人员对新时达机器人进行操作。
5、监控机器人状态在操作过程中,操作人员要时刻监控机器人的运行状态,包括运动轨迹、速度、负载等参数。
一旦发现异常情况,应立即停止机器人的运行,并进行检查和处理。
三、机器人编程与调试中的安全措施1、离线编程在进行机器人编程时,尽量采用离线编程的方式。
这样可以在不影响机器人实际运行的情况下,对程序进行编写、修改和优化,降低安全风险。

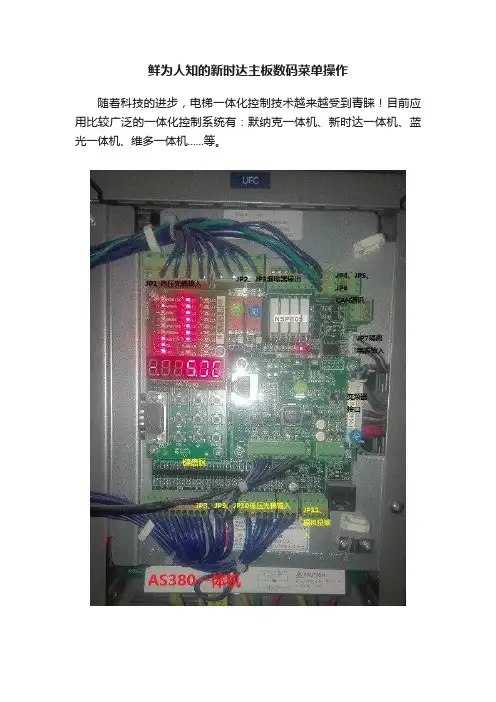
鲜为人知的新时达主板数码菜单操作随着科技的进步,电梯一体化控制技术越来越受到青睐!目前应用比较广泛的一体化控制系统有:默纳克一体机、新时达一体机、蓝光一体机、维多一体机......等。
本节小编与大家特别整理分享了新时达AS380一体机的主板键盘的操作(外接手操器为中文的,故在此不做介绍)。
下图为键盘布局:上图中:S1--F1--在开关门控制界面按此键开门。
S2--上键--浏览菜单时按此键上翻/输入数值时按此键增加。
S3--F2--在开关门控制界面按此键关门。
S4--左键--选择功能时按此键左移菜单/输入或修改数值时左移光标。
S5--MENU--按此键可进入LED功能指示灯选择界面和开关门控制界面。
S6--右键--选择功能时按此键右移菜单/输入或修改数值时右移光标。
S7--ESC--输入数据时按此键取消操作。
S8--下键--浏览菜单时按此键下翻/输入数值时按此键减少。
S9--ENTER--浏览菜单时按此键确认进入/修改参数时按此键保存。
下图为LED功能指示灯亮灭的说明及数码管显示区说明(正常非端站平层检修时):上图中L1~L18的亮灭及代表的意义可通过按键盘中间的S5-MENU键然后按上下键切换界面查看。
连续按两次S5-MENU键显示开关门控制界面如下图:当参数F165(开关门控制)的bit3位设置为1时,即开通了此键盘的开关门功能,在此界面下按F1执行开门;按F2执行关门。
按ESC 键退出。
接下来我们看看LED灯L1~L18亮灭的含义在不同的数码界面分别代表的含义。
按MENU键一下后按上下键选择不同的LED数码显示界面,然后按ENTER确认即可查看(以下界面均为电梯正常非端站平层停车检修时的状态)。
L1--门锁继电器输入信号L2--主接触器触点输入信号(接触器触点无粘连时点亮)L3--抱闸接触器触点输入信号(接触器触点无粘连时点亮)L4--抱闸开关(输入点正常时点亮)L5--电机过热保护(输入点正常时点亮)L6--上限位开关(组合)状态信号L7--下限位开关(组合)状态信号L8--检修上/下行信号(有信号时点亮)检修运行启动条件,以上8个灯全部点亮,表示外围信号正常,可以检修运行。
机器人使用手册及操作指南机器人是一种智能化设备,可执行特定的任务并帮助人们完成各种工作。
本文将为您提供一份机器人的使用手册和操作指南,以便您能够轻松地操作和控制机器人。
1. 介绍机器人是由各种传感器、执行器和控制系统组成的,具有自主导航、人机交互和动态决策等功能。
在正式操作机器人之前,请确保您已阅读并理解本手册的所有内容。
2. 准备工作在开始操作机器人之前,请确保以下条件已满足:- 机器人的电源已连接并打开。
- 机器人与相关设备(比如电脑或手机)之间已建立连接。
- 相关软件或应用已安装并处于正常工作状态。
3. 操作步骤以下是机器人的基本操作步骤:3.1 开启机器人按下机器人的电源按钮,等待机器人的启动程序完成。
3.2 连接设备使用相关设备(比如电脑或手机)连接到机器人的网络或蓝牙。
3.3 启动控制软件或应用打开机器人的控制软件或应用,并登录到对应的账户。
3.4 导航和定位使用控制软件或应用,选择机器人所需执行的任务和路径。
机器人通常配备了导航和定位系统,可自主识别和避开障碍物。
3.5 操作控制通过控制软件或应用,控制机器人的运动、动作和表情等。
机器人可能具有多种执行器,比如手臂、摄像头和扬声器等。
3.6 监控和反馈通过控制软件或应用,实时监控机器人的状态、传感器数据和任务执行情况。
同时,机器人也会通过声音、图像或文本等方式向您提供反馈信息。
4. 使用注意事项在操作机器人时,请务必遵守以下注意事项:4.1 安全操作确保机器人操作过程中的安全性,避免机器人撞击或伤害到人体。
4.2 温度和湿度控制在适宜的环境条件下操作机器人,避免机器人过热或过湿。
4.3 软硬件更新定期检查机器人的软硬件更新,以保持机器人的正常运行和功能更新。
4.4 数据隐私保护注意保护机器人相关的数据隐私,避免敏感信息泄露。
5. 故障排除如果机器人在使用过程中遇到故障或问题,您可以尝试以下方法进行排除:5.1 重启机器人尝试重新启动机器人,检查是否能够恢复正常。
SM-01-B输入输出接口定义:★ JP3.01 - JP4.06 为外部开关信号输入口;JP4.7 和 JP4.8 需要外部 +24V 电源输入,作为外部输入信号的隔离电源。
JP3.01: 输入 X0,检修信号,断开为检修,闭合为自动JP3.02: 输入 X1,上行信号. 在检修时闭合为点动上行,在司机时闭合为上行换向JP3.03: 输入 X2,下行信号. 在检修时闭合为点动下行,在司机时闭合为下行换向JP3.04: 输入 X3,上行多层终端换速开关, 2 米/秒以上电梯要求使用, (低速电梯不用此信号时,请设置输入类型 X3 为常开)JP3.05: 输入 X4,下行多层终端换速开关, 2 米/秒以上电梯要求使用, (低速电梯不用此信号时,请设置输入类型 X4 为常开)JP3.06: 输入 X5,上行限位开关JP3.07: 输入 X6,下行限位开关JP3.08: 输入 X7,上行单层终端换速开关.JP3.09: 输入 X8,下行单层终端换速开关.JP3.10: 输入 X9,上平层干簧JP3.11: 输入 X10,下平层干簧JP3.12: 输入 X11,调速器故障输出信号JP3.13: 输入 X12,消防开关JP3.14: 输入 X13,安全回路继电器检测JP3.15: 输入 X14,门锁回路继电器检测JP3.16: 输入 X15,调速器进线接触器检测JP3.17: 输入 X16,调速器出线接触器检测JP3.18: 输入 X17,抱闸继电器检测JP3.19: 输入 X18,门区信号输入,用于开门再平层和提前开门,闭合有效JP3.20: 输入 X19,调速器运行信号检测,检测到此信号闭合则抱闸可以张开JP4.01: 输入 X20,提前开门继电器检测JP4.02: 输入 X21,备用JP4.03: 输入 X22,抱闸开关JP4.04: 输入 X23,备用JP4.05: 输入 X24,备用JP4.06: 输入 X25,备用JP4.07: X0-X25 输入信号公共端,0V.JP4.08: X0-X25 输入信号电源端,+24V.★输入信号常开点/常闭点设置的意义是:如果此信号没有动作,输出信号是导通的,则称此信号为常闭信号。